RTK測位に基づく艇の動きに着目した漕艇技術分析
一方で,漕艇技術分析にRTK測位を適用するためには,艇の運動に関する高精度な計測結果をどのように活用すれば選手の漕艇技術の評価や指導に役立てられるのか,という問いに答える必要がある.特に漕艇競技のコースは直線のため,単純に艇の軌跡を可視化するだけでは具体的な技術課題の把握や改善につながらないという難しさがある.本稿では,RTK測位にもとづく漕艇技術の定量的な分析方法の確立にむけての第一歩として,艇の速度情報を中心とした活用方法を提案する.キーとなるアイデアは計測結果をストローク単位で集約して分析していく点で,これにより得られるストローク波形は,これまで感覚的に捉えられていた各選手の技術的な特性の定量化を可能とする.提案方法の有用性について,初心者から日本代表レベルまでの幅広い層を対象とした評価実験を行い,RTK測位データを競技現場で活用するための知見を得た.また,カメラ映像にもとづく技術分析との比較では,5名中4名で提案方法の効果を確認することができた.
Analysis of Rowing Techniques Focusing on Boat Movement based on RTK Positioning
However, in order to apply RTK positioning to rowing technique analysis, we must address the question of how to effectively utilize high-precision motion data to evaluate and improve athletes' rowing skills. In particular, since rowing races are held on straight courses, merely visualizing the boat's trajectory does not easily lead to the identification or improvement of specific technical issues.
As a first step toward establishing a quantitative analysis method for rowing technique using RTK positioning, this paper proposes a novel approach centered on the use of boat velocity data. The key idea is to aggregate the measured data on a per-stroke basis, allowing the generation of stroke-wise velocity waveforms. These waveforms enable the quantification of technical characteristics that have traditionally been perceived only subjectively.
To evaluate the effectiveness of the proposed method, we conducted experiments with a wide range of athletes, from beginners to members of the national team, and obtained insights into how RTK positioning data can be utilized in real-world training settings. Furthermore, in a comparative analysis with video-based technique evaluation, the proposed method demonstrated its effectiveness for 4 out of 5 athletes.
1. はじめに
漕艇競技は2000 mの直線をいかに速くゴールできるかを競う種目であり,漕艇技術の上達のためには艇を最適な速度・軌跡で航行させるために必要な動作を定量的に分析し,日々の練習に反映させることが重要である.
スポーツにおける選手の技術力の定量的評価については,カメラ画像の解析にもとづく研究が多く存在する.特に近年では,サッカーのシュート時の選手の熟練度を骨格情報に基づき評価する提案[1]や単眼3次元姿勢推定モデルに基づくコスト効率の高いモーションキャプチャシステムの提案[2]にみられるように,めざましい発展をとげている深層学習を用いた分析が注目されている.
また,IMUやモーションキャプチャを利用した動作分析に関する研究も広く行われている.これらのセンサは装着性に優れており,たとえば小型のIMUを選手に装着し,ラグビーのスクラム時の押す方向やタイミングの協調を評価する研究[3]や水泳において,泳者に慣性モーションセンサを取り付け水泳動作を測定し,即座に選手にフィードバックすることで泳動作改善を促す研究[4]などがある.
漕艇競技においても,陸上における練習に関しては,カメラ・IMU・モーションキャプチャのほか,トレーニングマシンによる力効率の評価などは日常的に利用されている.一方で水上での漕艇動作を計測し定量的に分析する方法についてはいまだ発展途上にある.大学の漕艇部等でよく利用されるのは,GNSS受信機やIMUを内蔵し,心拍数や軌跡・速度等を計測可能な小型端末であるが,普及価格帯の製品の精度は高くなく,位置に関しては数十mの誤差が出ることもある.漕艇動作をカメラで撮影して分析するような試みも存在するが,得られるのは動作の映像だけであり,動作と艇の運動が正確に対応づけられないため,陸上でのトレーニングマシンのように選手の動作を定量的に評価するのは難しい.
水上競技における数少ない定量的分析の試みのひとつに,GPSを用いたカヌー競技の分析に関する研究[5]がある.この研究では,標準的なGPSより高精度なDGPSにもとづく測位を用いて,カヌーによる500 m全力漕を計測し,艇速度,ストロークレート,1ストロークあたりの推進距離を抽出している.さらに,選手ごとに得られた指標をスコアとして比較することでストロークレート優位型や推進距離優位型などの漕動作特性に分類できることを示し,個々の選手の特性に応じた指導に応用できる可能性を示している.一方で,DGPSの精度は数十cm程度で,測位の安定性の問題もあり,1ストローク中に生じる艇の速度変化や,数cm単位の艇の微細な上下方向の動きといった挙動を把握することはできていない.
また,TessendorfらはIMUを艇やオールに取り付けることで漕艇技術の改善を支援する方法を提案している[6].IMUの計測結果から求めた,艇の加速度や1ストロークの長さやストロークレートといった技術指標が,技術向上の支援に寄与することを示している.一方で,IMUではドリフト誤差や積分誤差の問題から,1ストローク内の速度変化や艇の位置情報は扱えていない.
我々はこれらの課題に対する取り組みとして,RTK(Real-Time Kinematic)測位を漕艇技術の分析に活用する方法について検討を進めている.RTK測位は2つの受信機を用いることでcm単位の高精度な測位が可能な技術であり,近年の低価格化の流れもあり測量・土木・農業・自動運転等様々な分野で急速に普及しつつある.受信機を艇に設置するだけでその軌跡や艇の微細な挙動変化を正確に計測することができるため,水上での艇の運動の分析に適しており,有望な技術として期待される.
一方で,漕艇技術分析にRTK測位を適用するためには,艇の運動に関する高精度な計測結果をどのように活用すれば選手の漕艇技術の評価や指導に役立てられるのか,という問いに答える必要がある.特に漕艇競技のコースは直線のため,単純に艇の軌跡を可視化するだけでは具体的な技術課題の把握や改善につながらないという難しさがある.結果として,計測精度の高さは認識されているものの,試験的な試みを除いて現場ではほぼ活用されていないのが現状である.
本稿では,RTK測位にもとづく漕艇技術の定量的な分析方法の確立にむけての第一歩として,艇の速度情報を中心とした活用方法を提案する.キーとなるアイデアは計測結果をストローク単位で集約して分析していく点で,これにより得られるストローク波形は,これまで感覚的に捉えられていた各選手の技術的な特性の定量化を可能とする.
本稿の構成は以下のとおりである.2章では漕艇競技の特徴や基本的な漕艇動作,艇の仕組みについて述べる.3章ではRTK測位について,本稿の理解に必要な背景知識,および基本用語を説明する.4章ではRTK測位に基づく艇の動きの計測方法,および計測結果の分析方法について述べる.5章では本稿で提案するストローク波形にもとづく分析を初級者から日本代表レベルまでの競技歴・レベルの異なる5名の選手に対して行った結果を紹介し,得られた知見を示す.6章では,現在の競技現場で一般的なカメラ映像にもとづく技術分析との比較を通して,現場における提案方法の有用性を評価する.7章では先行研究との関連について述べる.8章はまとめである.
2. 漕艇競技
漕艇競技とは,選手が艇に搭乗し,2000 mの直線を漕ぎ切る時間を競うスポーツである.漕艇競技には1人乗りから8人乗りまでの種目があるが,使用される艇の基本構造は共通している.本研究では,1人乗り用の艇を使用してデータ計測を行う.そのため,艇の構造を説明するとともに,漕艇動作と関連が深い艇の部位について詳述する.図1に示すように,艇の両側には「リガー」と呼ばれる構造が張り出しており,そこにオールが取り付けられている.オールの中間部は「オアロック」によって回転軸として保持され,選手はオールの端部(ハンドル)を両手で握ることで力を艇に伝達する.伝達された力で艇は推進し,後方に進行する.そのため,艇の後方部分をトップ,前方部分をテールという.
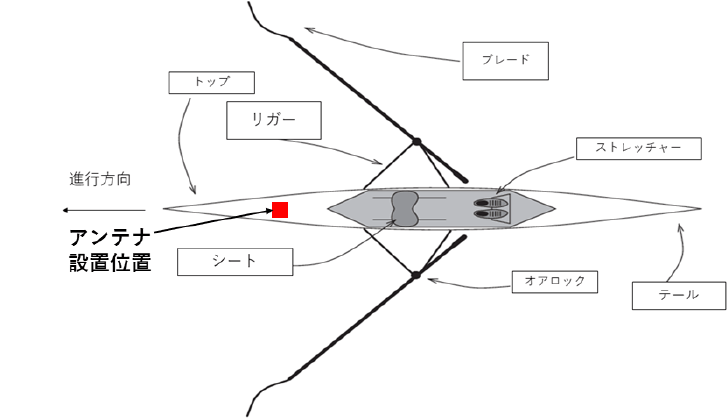
Fig. 1 Structure of boat.
選手の足は,「ストレッチャー」によって艇内に固定され,臀部を乗せる「シート」は前後方向にスライド可能となっている.このスライド機構により,選手は下肢の屈伸運動を活かした推進動作を行うことができる.漕艇動作は図2のように大きく以下の3つのフェイズに分けられる.

Fig. 2 Rowing motion.
- ・キャッチフェイズ:選手が上半身を前傾させ,脚を曲げた状態でオールのブレードを水に入れる準備段階
- ・ドライブフェイズ:脚の伸展とともにブレードで水を押し,艇を推進する力を発生させる段階
- ・フィニッシュフェイズ:脚を伸ばし切り,上半身を後傾させながらハンドルを上半身に引き付ける動作(このときオールは水中から抜けている)
このように,選手の漕艇動作は,艇に取り付けられたオール,ストレッチャー(足固定部),シート(前後動作部)と密接に関係している.特に艇の速度の変動や蛇行の動作は,ストレッチャーに対する脚力のかけ方で変動し,選手の技術レベルを反映する要素でもある.
そのため,このような漕艇動作の練度を高めるために,漕艇競技では,大学漕艇部や実業団に関わらず,基本動作の定着と向上のために,1分間辺り20回程度のストローク(漕ぎ)を1回の練習辺り1時間から2時間程度継続して行う.この基本練習を通じて,キャッチフェイズからフィニッシュフェイズまでの一連の動作の練度を高めていく.また,これらの基本動作の練習に加え,レースを想定したインターバルトレーニングなども実施される.
そして,技術向上のために練習の様子を定期的に撮影する.これらの映像は練習後に指導者と選手で練習を振り返るために活用される.特に,各フェイズでの動作や,選手間の動作の一致具合を重点的に確認する.これらを日々の練習で繰り返すことで技術習得を行っていく.
なお,本研究では艇の動きを計測するためのGNSSアンテナを艇の進行方向側に1か所設置しており,その設置位置は艇の構造説明に用いた図中に示している.
3. RTK測位
本章ではRTK(Real-Time Kinematic)測位の技術概要を説明した後,漕艇場におけるRTK測位の精度を評価した結果を示す.
一般に衛星測位では,複数の衛星との距離に関する制約条件を満たす解(測位解)を求めることで測位を行う.衛星との距離は衛星から受信した信号(電波)をもとに計算するが,電離圏・対流圏の伝播遅延等の要因により誤差が生じる.
RTK測位では,測位対象とともに移動する受信機(移動局)に加えて,既知の位置に設置された受信機(基準局)を用いることで,両者に共通する誤差要因の影響を消去する.距離の計算に波長の短い搬送波を用いることで,理論上は数cm程度の精度で測位可能である[7].
搬送波を用いた距離の計算では波数を求める必要がある.波数は最初整数制約を考慮せず実数値として求めるが,最終的に整数値として決定できたときの測位解をFix解という.測位結果の標準データ形式NMEA(National Marine Electronics Association)0183では,GGAセンテンスのGPS Quality indicatorフィールドで測位状態を表すが,Fix解の場合このフィールドの値は4となる.
測位解の精度は,受信可能な衛星の個数や配置,基準局と移動局の距離(基線長),マルチパス(反射波等)の有無等にも依存するため,測位環境ごとに異なる.
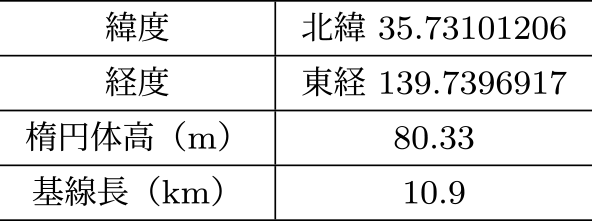
本研究の実験環境として用いる戸田漕艇場において,RTK測位および単独測位の固定観測における水平位置情報精度の比較評価を行った.本比較実験は,漕艇場の河川敷堤防上に設置したアンテナ(AH-4236SSN)からの信号を2つの同一機種の受信機(septentrio mosaic-x5)に分配し,一方の受信機ではRTK測位,他方の受信機では単独測位を行ったものである.RTK測位の基準局にはCQ出版社の公開基準局を利用している(表1).
Table 1 Information of CQ Publishing base station.
観測点を基準とし,各測位結果をXY平面上にプロットした結果,RTK測位(図3)では測位点が観測点の周囲に高密度に分布し,2次元のrms値である2drms値は10 mmである.一方,単独測位(図4)では観測点から南北方向に約500 mmの恒常的なずれが確認され,2drms値は1662 mmとなる.
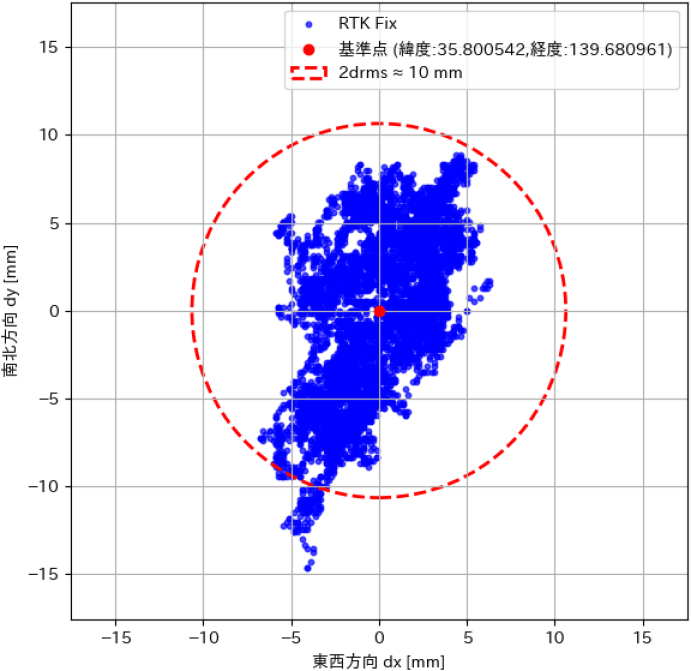
Fig. 3 2D distribution of RTK GNSS position data.
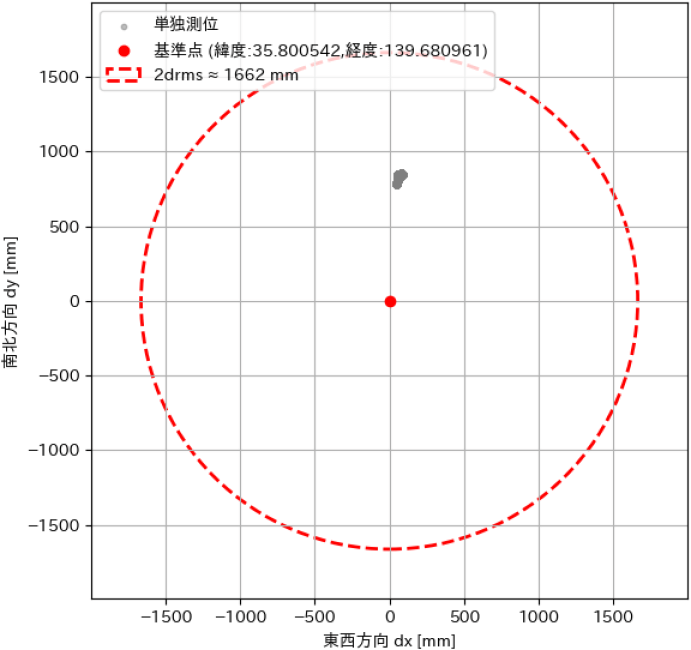
Fig. 4 2D distribution of standalone GNSS position data.
さらに,高度についても精度の比較を行った.各計測値における平均値を0としたときの分布を図5に示す.RTK測位では,標準偏差σが6 mm,2σが12 mmと小さく,高い精度を示している.単独測位においては,標準偏差が38 mm,2σが77 mmとなり,ばらつきがみられる.
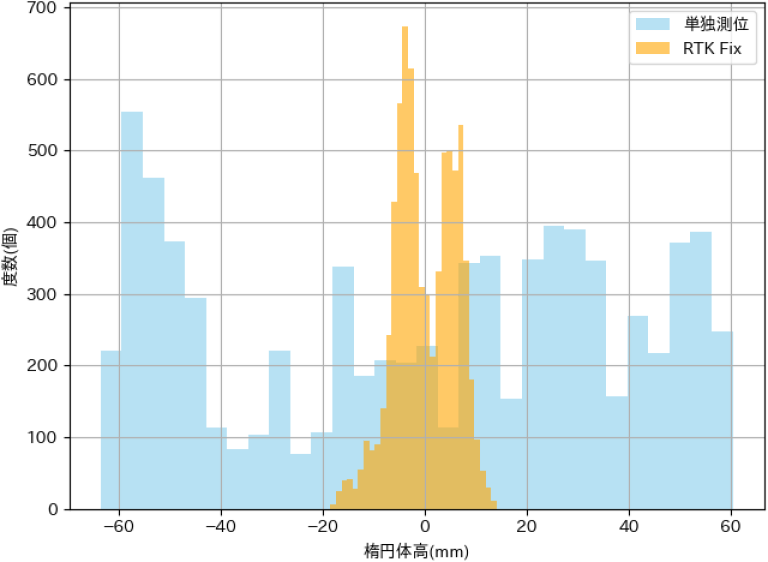
Fig. 5 Histogram of altitude data.
以上の結果から,RTK測位は水平方向・垂直方向のいずれにおいても高い測位精度と安定性を有し,本研究における艇の細かな運動分析において,有効であることが示される.
4. RTK測位を用いた漕艇技術分析
本章では,戸田漕艇場を例に,RTK測位によるデータ取得方法,およびRTK測位情報を用いた漕艇技術の分析方法について述べる.
4.1 RTK測位情報の取得方法
一般に漕艇場は衛星からの電波を妨げる建物等の遮蔽物が少なく,RTK測位にとっては理想的な環境である.そのため,都市部で必要となるFix解を求めるための工夫はほぼ不要であり,戸田漕艇場であれば,表1に示す基線長10.9 kmの基準局を用いることで安定してFix解を得ることができる.
RTK受信機として現在安価に入手可能なものとしてはZED社のF9P,およびseptentrio社のmosaicシリーズが代表的である.本稿の実験では,受信機としてseptentrio社のmosaic-x5を使用している.本受信機は測位レートが100 Hz(1秒間に100回測位)と高く,きめ細かな運動の分析が可能である.4.2節で述べるストローク分析においては,3秒程度のストローク周期内の測定点から選手の特徴を見出す必要があり,高い測位レートのメリットは大きい.
アンテナには3周波測位用のAH-4236SSNを用い,図6のように艇前部の中心から0.8 mのところに取り付けている.RTK測位演算はすべて受信機内蔵の機能を用いており,演算に必要な基準局からの補正データはRTKLIBを用いて受信機に転送している.
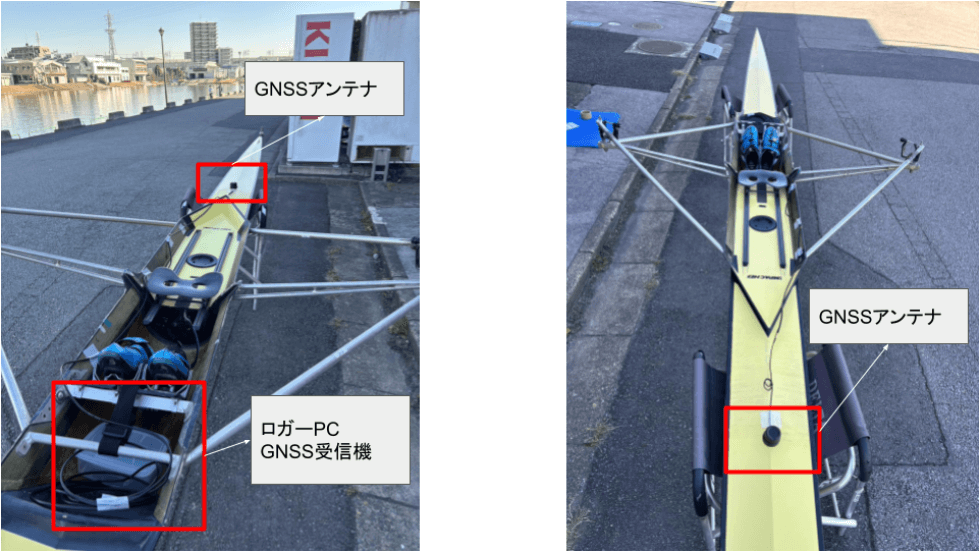
Fig. 6 Field installation setup.
受信機から得られたデータはUSBケーブル経由で計測用コンピュータreterminal(液晶ディスプレイ付きRaspberry Pi4)に送られ,NMEA形式で保存される.測位機器の外観を図7に示す.必要なスペースは縦6 cm,横20 cm,奥行き12 cm程度であり,艇内にコンパクトに収納可能である.なお,本実験におけるデータ取得・解析の全体図の流れを図8に示す.

Fig. 7 GNSS positioning equipment.
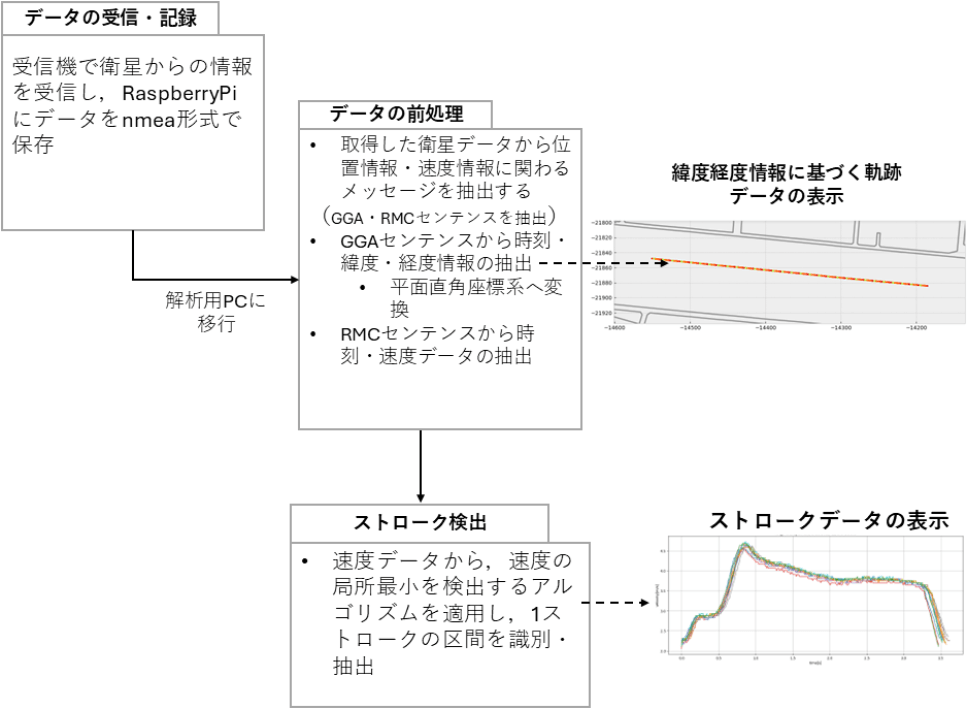
Fig. 8 Data processing flow.
4.2 分析方法
RTK測位の活用事例の多くは高精度な位置情報を中心にしているが,本研究では,位置情報に加え,RTK測位で得られる速度情報にもとづく分析方法を提案する.速度情報を活用するうえでキーとなるアイデアは,計測区間における速度情報をストロークごとに分割することで得られる,ストロークの速度変化グラフ(ストローク波形)に着目する点にある.ここでストロークとは「キャッチフェーズ」から「次のキャッチフェーズ」までの一連の動作を指す.提案方法では,RTK測位で得られた艇の速度データ(以降,艇速データと呼ぶ)に周期的な変動が観察されることに着目したストローク検出を行う.
図9にストローク検出のイメージを示す.検出は以下の2ステップで行う.
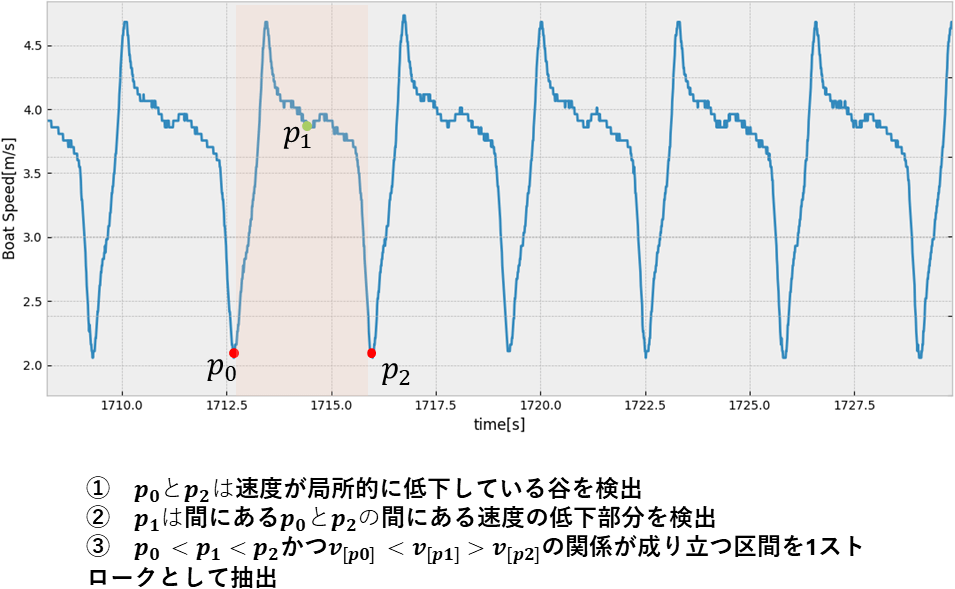
Fig. 9 Schematic of stroke detection.
- (1) ピーク(速度の谷)検出:艇速データの中で速度が大きく低下している谷にあたる部分は,キャッチフェーズ時にオールが入水したことによる速度低下区間だと考えられる.提案方法では,速度が局所的に低下している谷を検出することで,ストロークの区切りを特定する.具体的には,艇速データに対し,任意の時間幅Tを与え,Tの範囲において,条件vi = min(vi−T, ..., vi+T)かつvi < min(vi−T, ..., vi−1)を満たすインデックスiを局所的な速度の谷の候補として抽出する.ここでiは速度と時刻の共通の添字であり,viはtiにおける速度を表す.
- (2) ストローク区間の決定:検出された谷(peaks)の並びから,3つの連続するピーク点p0, p1, p2を取り出し,条件vp0 < vp1かつvp1 > vp2を満たす場合にストロークと判定する.これは,1回のストローク内で繰り返されるキャッチフェイズからドライブフェイズの間に速度が上昇し,その後速度が低下するという傾向にもとづくものである.この条件を満たす場合にのみ,対応する時区間[tp0, tp2]を1ストロークとして記録する.
上記の手法により,艇速の周期的な変動から複数のストロークを検出し,それぞれのストロークパターンや周期を分析することが可能となる.選手の動作とストローク中の速度変化の対応関係は図10に示すとおりである.速度が極小となる時刻が漕ぎ始めであるキャッチフェーズに対応し,その後,速度が増加して極大値を取る時刻が漕ぎ終わりにあたるフィニッシュフェーズとなる.その後は,次のストロークに向けた準備段階を経て,再びキャッチフェーズへと移行する.この一連の動作が1ストロークを構成する.
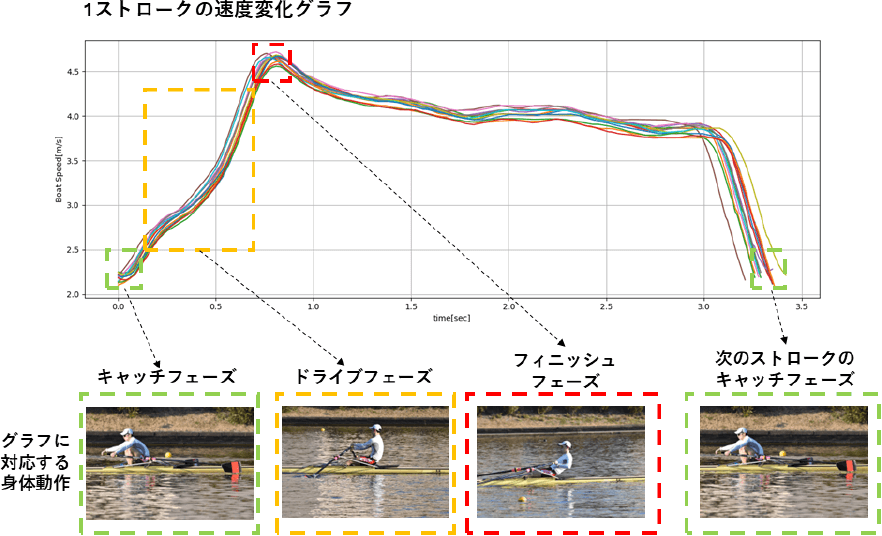
Fig. 10 Correspondence between stroke motion and stroke waveform.
図11に,RTK測位データを可視化する分析ツールの画面例を示す.本ツールはNMEA形式の測位データファイルを読み込み,本研究の中心となるストローク分析の結果に加えて,指定した時区間における速度変化,姿勢(向き・高度)変化,航行軌跡等の基本情報を表示可能である.なお,航行軌跡については可視化を工夫し,国土地理院の基盤情報地図に重畳する形で表示する他,各点における速度をプロット点の色で判別できるようにしている.
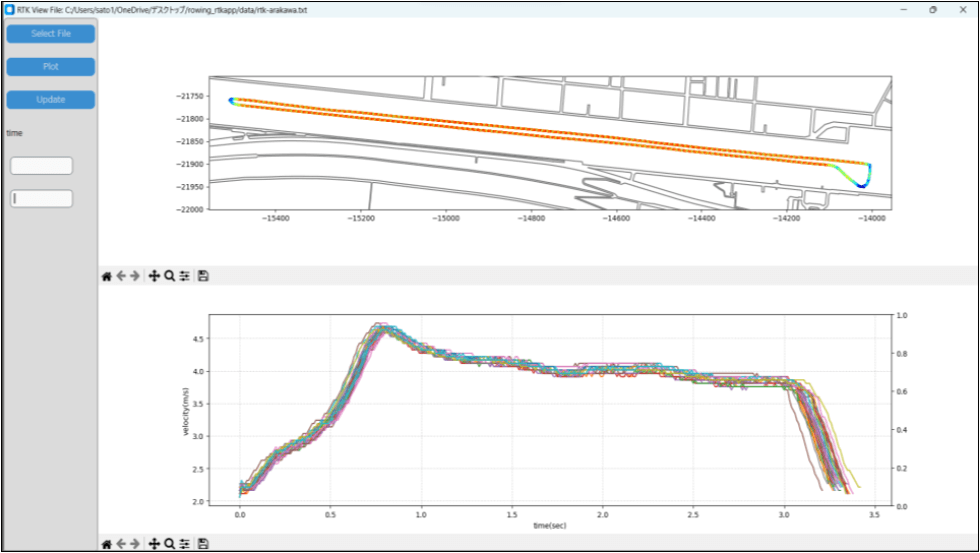
Fig. 11 Analysis tool interface.
さらに,本ツールは艇に搭載したRTK受信機によって得られる位置情報と速度情報に加え,艇の姿勢や動作(ピッチやロール)を推定し,艇の運動特性と速度の関係性を明らかにすることを目指している.現段階では可視化と基礎的な解析機能が中心であるが,今後は姿勢情報の抽出精度を高め,艇速との連動性分析を可能とする拡張を続けていく予定である.
5. 分析例
本章では,初級者から日本代表レベルまでの幅広い選手5名(社会人3名(うち日本代表2名)および大学生2名)を対象に,4章で提案した分析方法の有用性を確認するために行った評価実験の結果を示す(5.1.6項および5.2節).また,得られた知見についてまとめる(5.3節).
実験はすべて戸田漕艇場のコース(全長2.5 km)で行ったものである.4章で示した測定機器を載せた艇を使用し,各選手には練習ペース(1分間に18回漕ぐ)およびレースペース(1分間に30回漕ぐ)でコースを漕ぐように指示した.
なお,本稿で示す実験は以降の章のものも含めてすべて,被験者に対して研究の目的・内容・実施方法について事前に十分な説明を行い,インフォームドコンセントに基づき同意を得たうえで実施した.記録されたデータは,被験者のプライバシーを配慮し,個人が特定されない形で厳重に管理しており,研究目的以外には使用していない.
5.1 練習ペースの結果からの分析
本節では,練習ペースのデータを用いて各選手の課題や特徴を分析した結果について述べる.
5.1.1 学生選手1(競技歴3年)
本選手は大学から漕艇競技をはじめた選手である.そのため,技術はまだ成熟しておらず「フィニッシュのときに最後まで水を押せずに加速が不十分である」という課題を抱えている.ストローク波形を図12に示す.このグラフの速度波形からは,ストローク開始直後(時刻0.0[s])に速度が一旦最小値を取り,その後の0.2~0.4[s]の間で速度上昇が停滞し,0.4[s]以降で再び明確な加速がみられることが分かる.このような特徴は,ドライブフェーズ初期における加速の不連続性を示しており,理想的なストロークにみられるような,キャッチ直後からの連続的な加速とは異なる.特に,図に示しているドライブフェーズ内の0.2~0.4[s]の区間では速度勾配が緩やかであることから,加速が一時的に停滞していると読み取れる.このことから,本選手においてはキャッチに課題があり,たとえばブレードの入水が不完全である,あるいは入水タイミングと脚の動作開始タイミングにずれがあることが推察される.
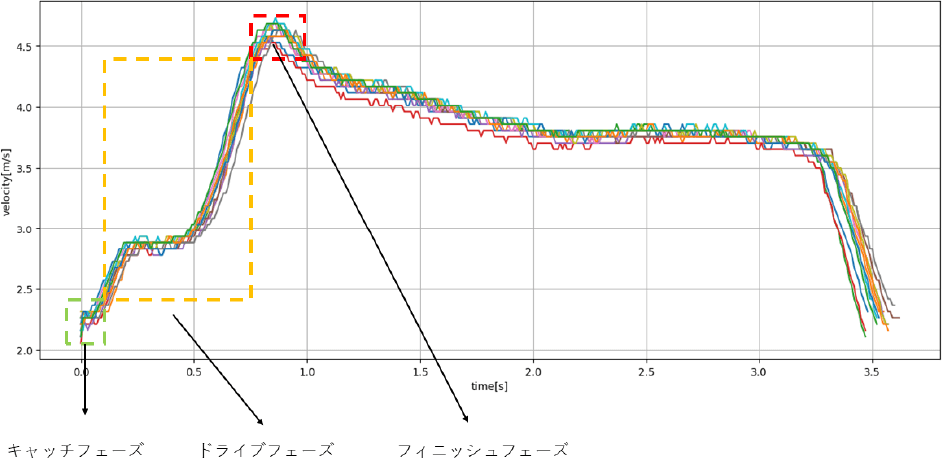
Fig. 12 Stroke waveform: Student player 1 (3 years of experience).
5.1.2 学生選手2(競技歴6年)
本選手は高校から漕艇競技をはじめ,大学まで続けている選手である.抱える課題は「蛇行する回数が多いこと」である.そこで,本選手では航路の情報を基に蛇行の分析を行う.また,選手の漕ぎの特徴を発見するためにストロークにおける速度変化にも着目する.図13で示すように,本選手は平均的に276度~274度を漕いでいることが分かる.しかし,450[s]付近や455[s]付近の角度変化をみるとキャッチフェーズ直前とドライブフェーズの開始付近で2度以上進行方向が変化しており,蛇行の一因と考えることができる.ただし,これらの角度変化のみから実際に蛇行しているとは断定することはできず,あくまでその可能性を示唆するものである.なお,艇の進行方向計算はRTK測位の緯度・経度の変化から得ており,艇自体のヨー(航向)の影響を受ける可能性がある.しかしながら,前述した450[s]と455[s]の進行方向の変化ではストローク周期に対して周期的に表れていること,図中の他のストロークではみられない角度変化であるため,選手の漕ぎの動作に由来する再現的な特性であると解釈される.さらに,本選手の漕ぎの特徴を分析するために,図14に示すストローク波形に注目すると,抽出したストロークのいずれも,速度の極小値から極大値まで明確な停滞区間を経ずに加速していることが読み取れる.これは,ストロークのドライブフェーズにおいて脚・上体・腕の連動動作がスムーズであることを示している.
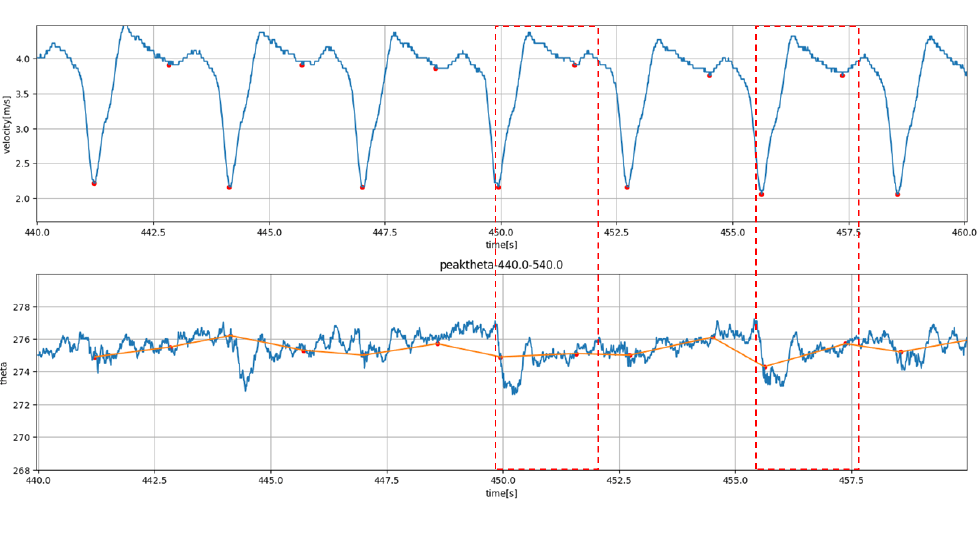
Fig. 13 Changes in speed and angle: Student player 2 (6 years of experience).
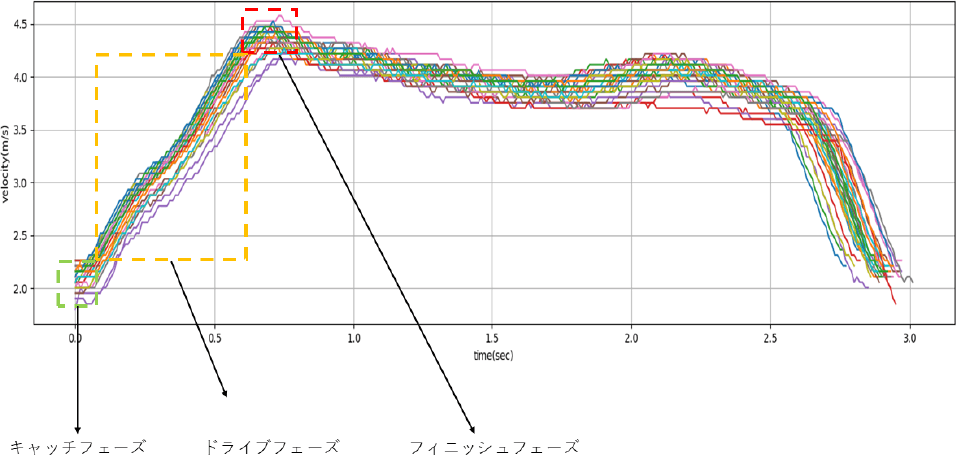
Fig. 14 Stroke waveform: Student player 2 (6 years of experience).
5.1.3 社会人選手
本選手は日ごろの練習からコーチに「2段漕ぎをしている」という指摘をされている.2段漕ぎとは,特にキャッチのタイミングと加速の連携に課題があり,これが全体のスピードやリズムに影響を与えるとされているものである.選手は練習中に課題を意識して修正を試みているが,具体的に艇にどのような影響を与えているかの理解が難しいことから,目に見える改善は難しく,高いレートでの漕ぎでは一層顕著となる.本選手ではキャッチ付近に着目し,分析を行う.図15に示すストローク波形において,ドライブフェーズに相当する時間帯(0.0[s]~0.9[s])のうち,特に0.2[s]~0.4[s]付近で艇速の上昇が一時的に停滞していることが確認できる.この区間では,速度の傾きが緩やかであり,加速度が小さくなっていることが読み取れる.このような特性は,本選手がコーチから指摘されている技術課題と一致しており,指導内容の妥当性を裏付けているものと考えられる.この加速停滞の原因としては,ドライブフェーズ中の身体動作の「スムーズさ」が不十分である可能性がある.ここで言う「スムーズさ」とは,ドライブフェーズの動作を脚・上体・腕の動きの3つに分けたときの各部位の動作における連携具合である.
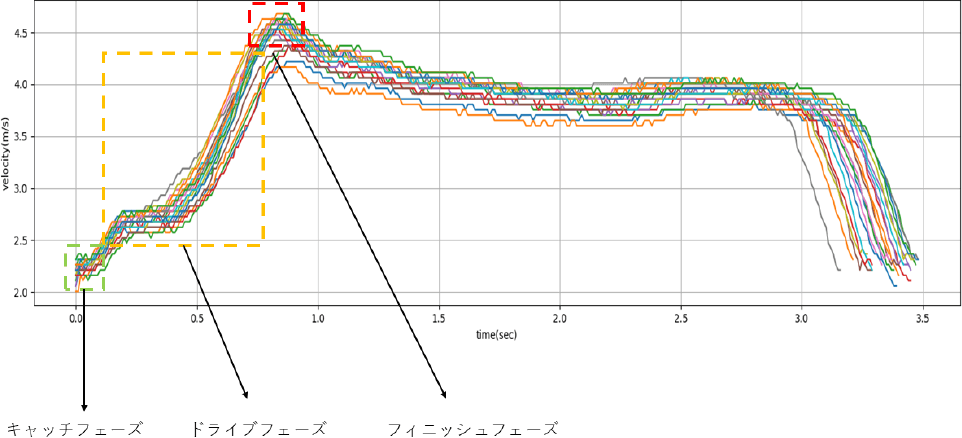
Fig. 15 Stroke waveform: Company player.
5.1.4 日本代表選手1
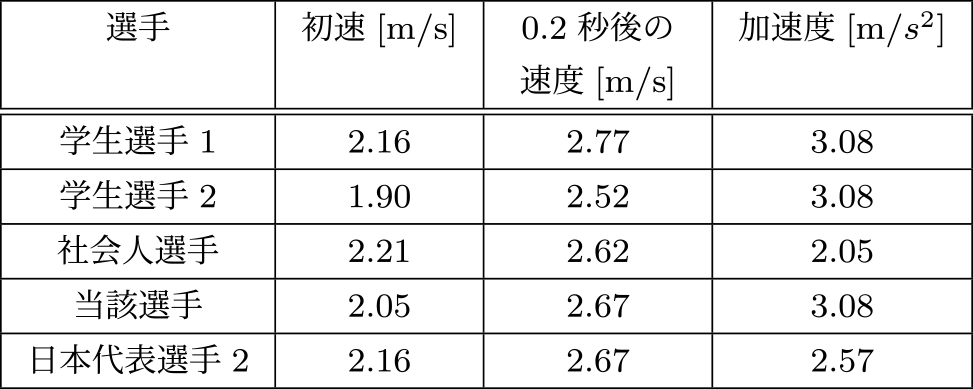
本選手は軽量級(体重制限有)日本代表選手であり,競技歴は10年以上の選手である.本選手は漕ぐときに艇の動きを意識しており,特にキャッチフェーズの艇の減速を最小限に抑えることに重点を置いている.そのため,ストロークごとの速度変化に着目し分析を行う.図16に示すストローク波形より,キャッチフェーズでの速度は2.0[m/s]であり,これは計測をした他の選手とおおよそ変わらない記録である.しかし,本選手が他の選手と決定的に違う部分はドライブフェーズにおける加速の立ち上がりである.キャッチ直後からドライブフェーズ序盤である0.2[s]の加速度は3.08[m/s2]である.この値は他の選手の同区間の加速度(表2)と比較すると1番高い値となる.一方で学生選手も同区間に同程度の加速度の値を取ることが分かった.これは練習ペースにおいての結果であり,後述するレースペースではキャッチフェーズ序盤からフィニッシュフェーズにかけて他の選手よりも加速度が高いことを示している.さらに図中に赤点線で示すように,フィニッシュフェーズ後(0.9[s]~1.0[s])に最高速度を記録した直後,青点線で示すように速度の減速がみられる.具体的には,次のストロークまでの区間において,0.5[m/s]以上の速度低下が観測されており,他の選手と比較して減速傾向が強いことを示している.ただし,この速度低下の0.5[m/s]という値は,他の選手における同区間での速度低下量と比較した際に,減速傾向の強さを示すための相対的な指標として用いている.従って,本研究において用いる1つの目安であり,必ずしも一般的な閾値として定義されたものではない.
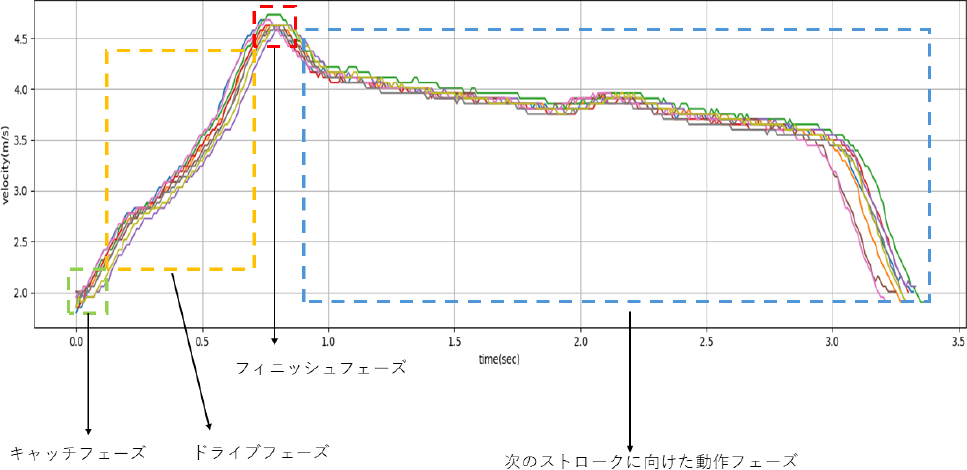
Fig. 16 Stroke waveform: National team player 1.
Table 2 Changes in acceleration.
5.1.5 日本代表選手2
本選手はオープン(体重制限無)の日本代表選手である.本選手は艇の動作を意識しており,特にフィニッシュフェーズ(最高速度到達地点)後に艇が自身の下を滑るような意識で漕いでいる.これは,次のキャッチに移行するまで(以下フォワード)の身体の動作で艇の速度が落ちないような動きをしているということになる.たとえば,オールの高さを水面から一定の高さに保ち続けるなどの工夫はフォワード中に艇の速度を減速させない動作に該当する.
図17に示すストローク波形からキャッチ時からスムーズに最高速度まで常に加速し続けていることが分かる.また,本選手は最高速度に到達する少し前の加速度が高いという特徴がある.0.5~0.75[s](最高速度到達時刻)の加速度はおよそ4.0[m/s2]である.この加速度を示すのが加速の後半ということはこの選手は漕ぎの後半にかけて艇を加速させることが得意な選手であると考えられる.加えて,漕艇動作の安定性の指標として,各ストロークの速度変化波形がどの程度一定しているかを評価するために,Dynamic Time Warping(DTW)を用いた波形間の類似度を算出した.DTWは時系列データ同士の類似度を,時間軸をずらしながら柔軟に比較する手法であり,ストロークの長さやタイミングが多少異なっていても,形状の一致度を測ることができる.本選手の全ストロークとその平均ストロークとのDTW距離を算出した結果,平均DTW距離は1.79となった.この値は,他の選手(日本代表選手1:2.24学生選手1:2.75学生選手2:2.02社会人選手:3.00)と比較して最も低く,ストロークのばらつきが小さいこと,すなわち安定した漕ぎを実現していることを示している.
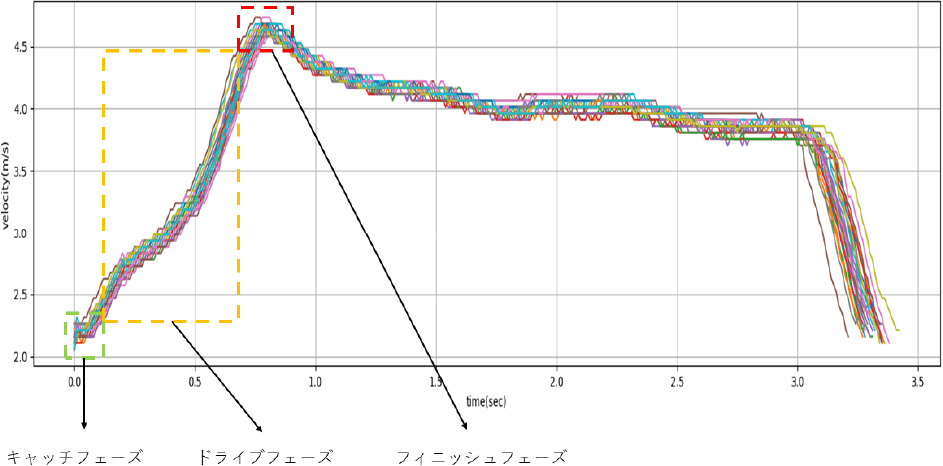
Fig. 17 Stroke waveform: National team player 2.
5.1.6 各選手の比較
各選手の練習ペースにおけるストローク波形を図18に示す.この図からどの選手も最高速度を迎えた後,速度が緩やかに落ちていることが分かる.漕ぎ始めからの加速度は学生選手2(競技歴6年)が一番大きく,社会人選手や日本代表選手よりも大きくなるという結果を得ることが出来た.
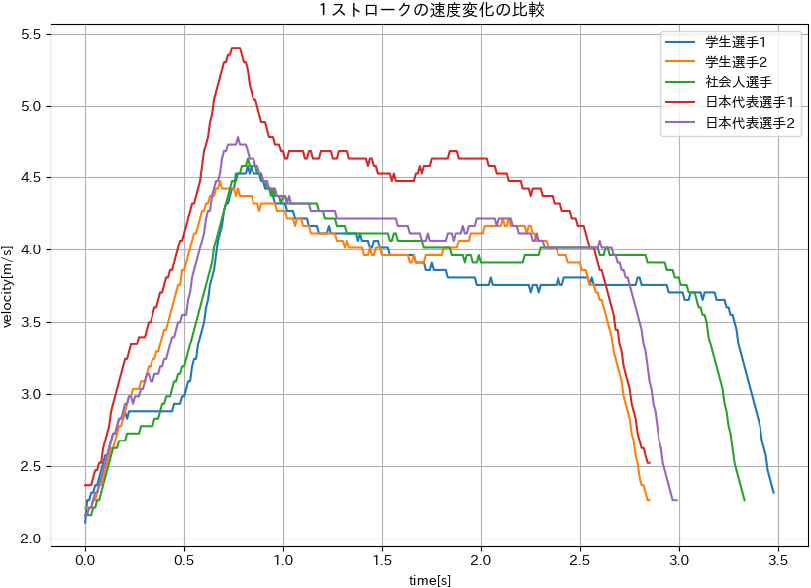
Fig. 18 Comparison of mean stroke waveforms: Training pace.
また,社会人選手1と学生選手1(競技歴3年)において,加速途中に停滞している部分があることから,漕ぎの特徴が似ている可能性がある.この2人は抱える課題は違うが,ストローク波形から課題の本質は漕ぎ始めにあると思われる.
さらに,日本代表選手の2人は最高速度まで速度変化が似ているが,日本代表選手1は最高速度までスムーズに加速しているのに対し,日本代表選手2は加速が緩やかになるタイミングを経た後,加速の値が大きくなることが読み取れる.そして,最高速度到達後どちらの選手も速度が低下していくが,日本代表選手2の選手は減速が緩やかであり,最高速度付近を保ち続けていることが分かる.これらの違いは,2人の選手の漕ぐ際の意識の違いによって生じるものだと考えられる.漕ぎ始めの速度を落とさないように漕ぐことで最高速度までスムーズに加速ができたり,最高速度後に艇が減速しない様な動きを意識したりと選手自身の漕ぎの特徴がストローク波形に現れる結果となった.本結果について,社会人選手が所属しているチームの指導者から「キャッチでの立ち上がりや,フィニッシュまでの加速感などの動画だけでは見えないところが可視化できることや,見えない感覚的なところにもアプローチできる」というコメントがあった.このように,速度波形の比較は選手ごとの漕ぎの特徴を定量的に捉えるだけでなく,指導者の観察を補助する役割を担い,映像だけでは把握しにくい技術的特徴の明確化に有効であることが示された.
5.2 レースペースの結果からの分析
各選手のレースペースにおけるストローク波形は図19のとおりである.まず,図中の「速度極大1」および「速度極大2」とラベルされた個所から,日本代表選手と社会人選手において,速度の極大が2回観測されることが分かる.一方で,学生選手2の波形では1回のみの速度極大しか観測されない.図の該当箇所を比較することで,1度目の極大値が大きい選手ほど2度目の極大も高い傾向があることが確認できる.このような2段階の加速はレースペースのみにみられる現象である.
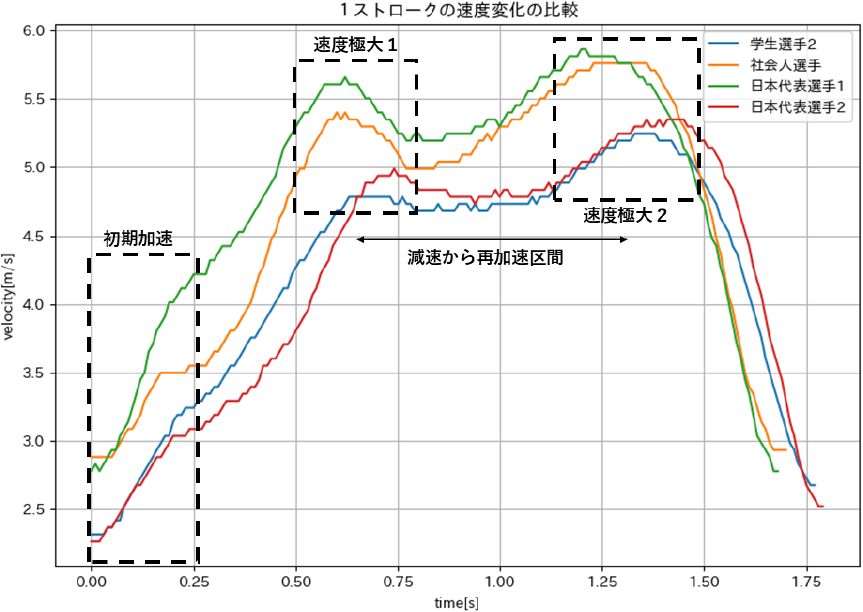
Fig. 19 Comparison of mean stroke waveforms: Race pace.
このような現象がみられる要因として「出力の大きさの違い」と「1分間に漕ぐ回数の違い」が挙げられる.レースペースでは,選手が最大限の脚力を発揮し,1分あたりのストローク数が増加する.これにより,艇に加わる力の変化が大きく,体重移動もより顕著になる.その結果,艇の速度波形にも違いが生まれる.また,発揮されるパワーや1分間あたりに漕ぐ回数が選手ごとに異なるため,選手間でもレースペースにおける波形に違いが生じていると考えられる.なお,本研究では,選手の基礎的な技術力がより反映されやすい練習ペースに着目し,その条件下での解析を重点的に実施している.
次に,図中の「初期加速」と記した個所に着目すると,日本代表選手1と学生選手2はキャッチ直後から顕著に加速している様子が読み取れる.一方で他の2人の選手はおおよそ0.25[s]以降に艇速の加速が始まる.図中の速度傾きから,最も加速度が大きいタイミングは練習ペース時と類似しており,レースペースにおいても各選手の漕ぎの特徴が維持されていることを示している.
さらに,図中の「減速から再加速区間」に示すとおり,速度が一度減速した後,再度加速している様子が観察される.これは,艇の姿勢変化が影響していると考えられる.オールを抜いた(1度目の速度の極大)後の速度変化は選手の体重移動による艇の姿勢の変化によるもので,その変化が水の抵抗による減速させる力を上回るか否かが2度目の速度の極大と関係していると考えられる.レースペースにおいて2度の速度の極大があり,練習ペースでは1度の速度の極大しかないことはこの仮説の裏付けとなる.
最後に,図20に示した日本代表選手1の速度とピッチングの関係に注目すると,「速度極大」タイミングでは高度(艇の上下方向変位)が最小となっており,艇が沈みこんだ状態であることが分かる.その後,艇の姿勢が変化するにつれて再加速が発生している.これらの挙動は複数のストロークで同様の傾向を示している.特に,艇の速度が速度極大のタイミングで高度が約4 cm沈む挙動が連続して観察され,これは本研究の3章で述べた高度の計測誤差を上回る変化であると判断できる.そのため,艇の再加速と艇の姿勢変化には関係があることがうかがえる.
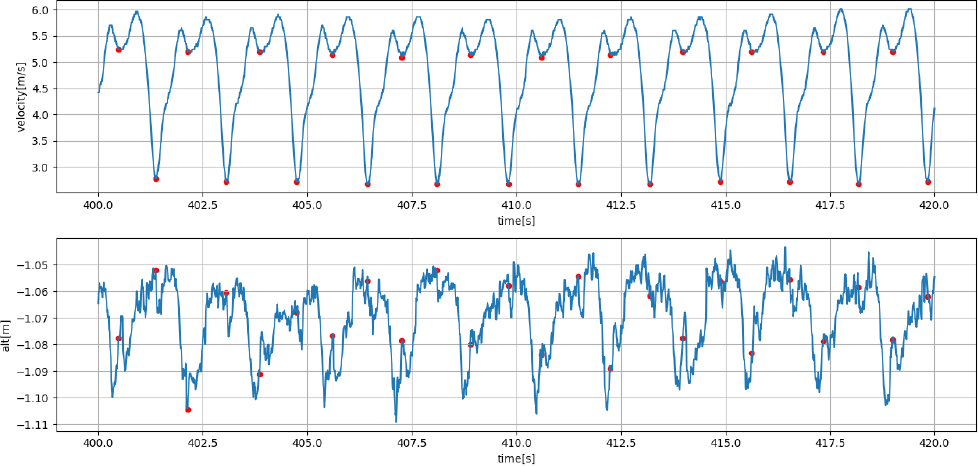
Fig. 20 Relationship between speed and altitude for National team player 1.
5.3 得られた知見
練習ペースの結果から,選手が漕ぐときに意識している点や課題がストローク波形に表れることが分かる.たとえば5.1.4項の「漕ぎ始めの際の減速を最小にするように漕ぐ」という意識がある選手は最高速度までの加速がスムーズであり,5.1.5項の「艇が減速する身体の動かし方をしない」という意識で漕いでいる選手は最高速度到達後に他の選手よりも速度の減速が緩やかになっているのが見てとれる.5.1.2項の競技歴3年の学生選手と5.1.3項の社会人選手は異なる技術的課題を抱えているが,ストローク波形には共通して加速の停滞がみられる.学生選手はフィニッシュフェーズに課題があり,社会人選手はキャッチフェーズでの初期加速の遅れが課題であるが,いずれも「ドライブフェーズ全体を通じた加速の持続性」に問題がある点で共通している.このように,技術的課題が現れるフェーズは異なるものの,「艇の加速が十分に維持されない」という力学的結果がストローク波形に表れており,加速の停滞という共通の特徴が観察された.したがって,漕艇技術の本質的な課題として,「漕ぎ始めからフィニッシュに至るまでの加速の持続」が重要である可能性が示唆される.
5.2節で示すように,レースペースにおいては選手ごとにストローク波形の違いが顕著に表れた.特に日本代表を含む社会人選手(5.1.3項,5.1.4項および5.1.5項)においては加速が2度みられることから,速い選手には速度の極大が2度存在するという傾向がうかがえる.また,速度とピッチングの関係において,速度が極大に達するタイミングでは艇の高度が最小となっており艇が最も沈みこんだ状態であることが分かる.その後,再加速が艇の浮上・姿勢回復(次のストロークに向けた準備)に伴って生じていることから,再加速には艇の姿勢の変化に関係があることが考えられる.
5.1.6項,5.2節では,ストローク波形を用いて選手ごとの漕ぎの特徴を定量的に比較した.同じ方法は複数人種目における選手選考や選手間の相性の判断にも適用可能であると思われる.ここでの相性とは,ストローク内における加速のタイミングが一致していることを指す.また,チーム内で技術力が高い選手の特徴は他選手にとって技術力向上のための基準として役立つと期待される.
5.1.1項の競技歴6年の学生選手については,技術上の課題である蛇行に関する分析を行った.RTK測位による高精度な艇の位置情報を用いると蛇行量の正確な推定が可能であり,従来発見が困難であった漕艇動作の各フェーズにおける蛇行の傾向を推定することができるようになるため,選手が自身の癖を適切に把握できるようになる.また,正確な測位情報に特に舵手の技術力評価において有効であると思われ,現在行っている横からのカメラ映像を基に技術力を判断をするという曖昧性のある方法を補完する方法としての役割が期待できる.
6. 現場における有用性の評価
本章では,4章で提案したRTK測位データ分析ツールを学生選手から日本代表選手まで幅広い層の選手に利用して貰い,従来の動画観察にもとづく分析と比較することで提案方法の有用性を評価する.また,評価結果をもとに,漕艇の練習現場におけるRTK測位の活用方法に関する知見を述べる.
6.1 評価方法
競技歴3年の学生選手から競技歴15年の日本代表選手までの様々なレベルの5名の被験者を対象とし,RTK測位データ分析ツールの使い方を説明したうえで,以下の手順で従来方法(漕艇動作の動画観察にもとづく分析)と提案方法(動画とRTK測位データを併用した分析)の効果を比較する.
- (1) 最初に,各選手は漕艇動作を撮影した動画だけを参照し,技術的な改善ポイントの分析を行う.
- (2) 次に,各選手は上記動画およびRTK測位データを参照し,技術的な改善ポイントの分析を行う.
- (3) 上記2種類の検討結果を表3に示すスコア基準にもとづきスコア付けする.
表3 スコアリング基準
Table 3 Scoring criteria.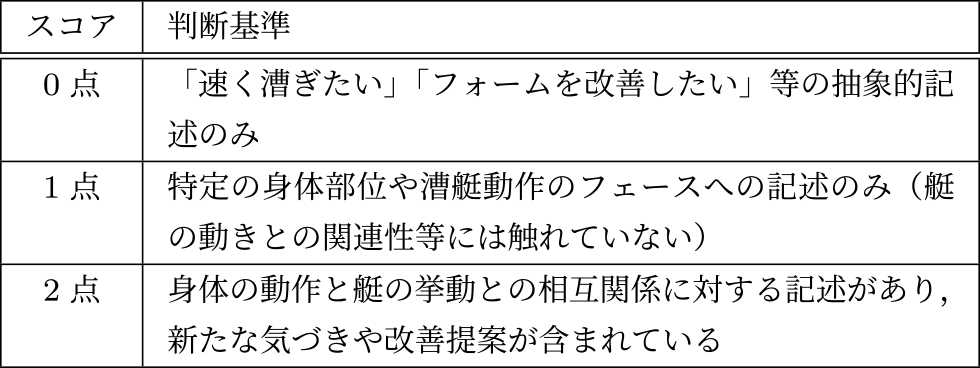
表3に示すスコア基準は,選手による技術分析の実効性を考慮して定めたものである.ここで実効性とは,選手が得た新たな気付きの質と量である.質とは,得た気付きが艇を効率的に進めるための身体の使い方の改善に寄与することを意味している.このような定義は素朴なものであるが,「新たな気づき」「艇を効率的に進めるのに役立つ気づき」を高評価することは,技術力向上への寄与を評価する上で自然なものである.
0点は「早く漕ぎたい」や「フォームを改善したい」といった抽象的な記述のみで構成され,具体的な技術的示唆に乏しく,新たな気付きが得られていない場合に該当する.
1点は,日常の練習を通じて得ることができる視点に基づく気づきにとどまる場合である.これは,練習中に自身が意識して改善を試みる身体動作や漕艇動作のフェーズへの言及などが該当する.このような視点は,競技歴の蓄積や指導者からのフィードバックを通じて多くの選手が身につけるものであり,艇との相互作用への理解や因果的な考察には至っていない.このような視点に基づく気づきは,その効果に諸説あり,正しさは確認されていないことがある.たとえば,キャッチフェーズにおいて腕を速く動かすことでオールの入水が速くなり艇を効率よく進めることができるという意見もあるが,腕を動かすことなく,オールの重さを活かした入水のほうが艇に推進力を与えることができるという意見もある.
2点は,身体動作と艇の挙動との相互関係に言及があるものである.たとえば,レースペースにおける2段階加速のような艇速の変化を,脚の蹴り出しの速さや体重移動と関連付けて説明している場合が該当する.このような気付きは従来の練習からは得られにくいが,RTK測位では,速度や高度のような細かな艇の動作が可視化されるため,身体動作と艇の挙動の相互作用が把握しやすくなり,効率的な艇の進め方に関する指針を得ることができる.
6.2 評価結果
各選手の分析結果を表4,スコアを表5に示す.表5から分かるとおり,被験者5名中4名でスコアが向上した.
Table 4 Evaluation results 1.
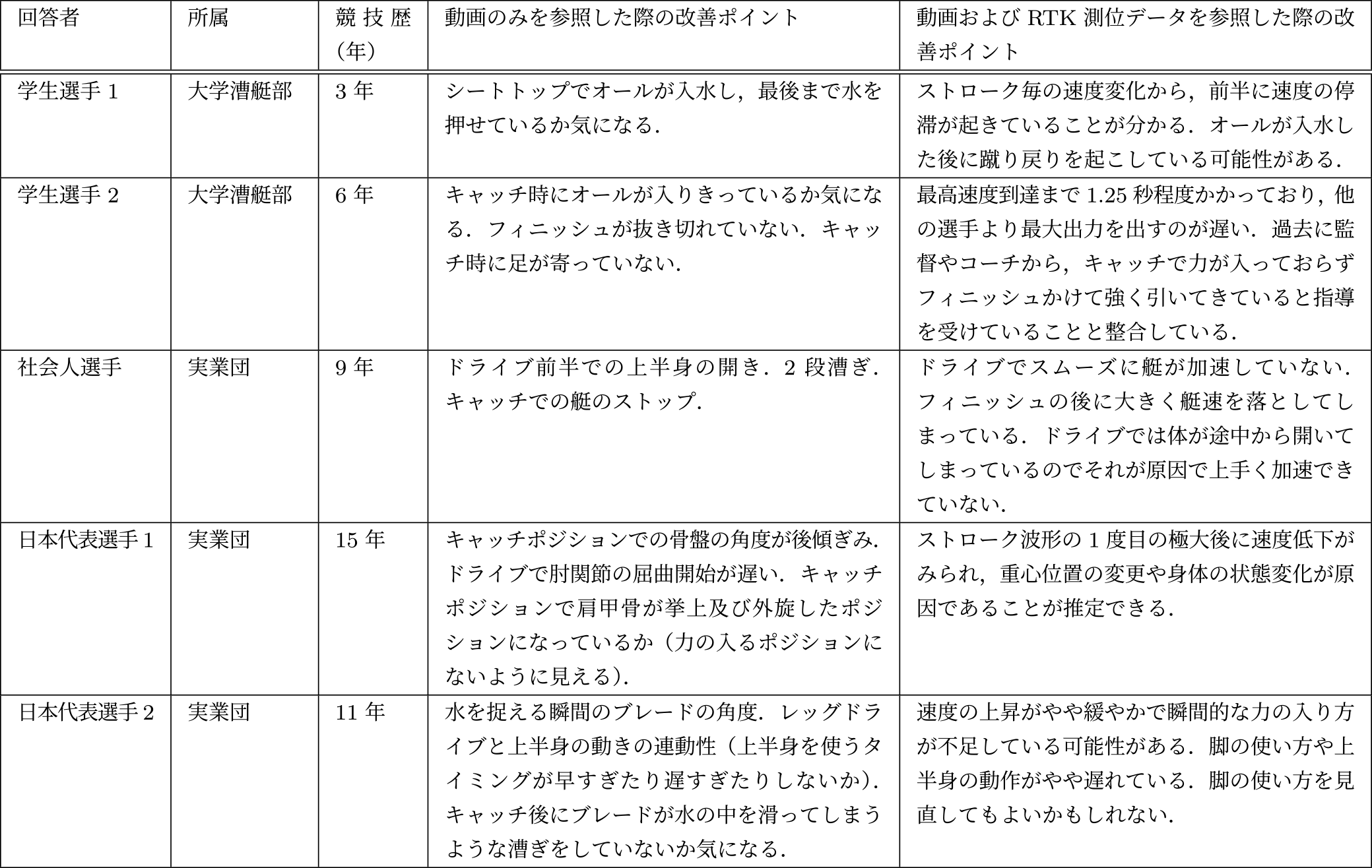
Table 5 Evaluation results 2.
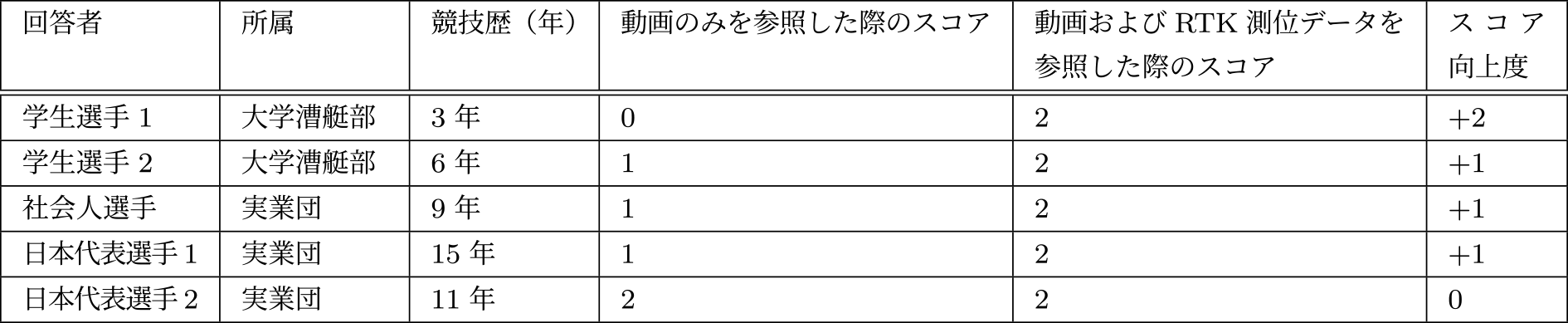
表4の各選手の分析結果をみると,動画のみを参照した場合,選手は主に姿勢や動作のタイミングに着目して分析しているが,感覚的な表現にとどまっているのに対し,RTK測位データを併用した場合,身体の使い方と艇の速度変化を関連づけた客観的な分析が行えていることが分かる.選手のレベルによる違いに注目すると,学生選手は動画だけでは課題の発見が不十分であった.しかし,RTK測位による速度波形を併用することで,注目すべきタイミングが明確になり「オールが入水後に蹴り戻る動作が発生している」など,具体的な課題に気付くことができた.また,日本代表選手の場合,動画だけでもある程度課題把握ができていたが,RTK測位データの併用により技術改善の方法が明確化され,より高い技術レベルに到達するための手がかりが得られている.
6.3 RTK測位の現場活用に関する知見
評価結果から,RTK測位は動画だけからは気づきにくい課題を客観的かつ具体的にする効果があることが分かり,漕艇技術分析における有用性を確認できた.評価結果をふまえて,初心者,熟練者,および指導者のそれぞれに応じたRTK測位の活用案を以下にまとめる.
初心者における技術課題発見支援 初心者は正確な漕艇動作を身に着ける段階にあり,動画内の自身の漕艇動作の細かな点に着目し,良し悪しを判断することが難しい.RTK測位データをもとに,ストロークごとの速度変化の違いを確認したり,熟練者と比較することで,問題のあるフェーズを特定し,技術課題の発見につなげることが可能になる.たとえば,表4の学生選手1は,動画からは自身のオール操作の良し悪しを判断しきれていないが,ストローク波形に存在する速度停滞箇所をもとにしてオール操作における課題を確認できている.
熟練者における技術課題分析支援 熟練者は動画から自身の漕艇動作の問題点を直感的に把握できるが,RTK測位データを併用し,身体の使い方とその結果としての艇の動きを関連付けることで,具体的な分析や改善案の検討が可能となる.たとえば,表4の日本代表選手2は,動画から把握したブレードの角度や脚と上半身の動きの連動性の問題を,ストローク波形から読み取れる加速の鈍さと関連付けることで,瞬間的な力の込め方等のより動作の内部構造にわけいった課題分析が行えている.
指導者による選手へのフィードバック支援 経験豊富な指導者と未熟な選手では技術課題の把握レベルに差があり,そのギャップが指導者から選手へのフィードバックの妨げになっている.RTK測位データを併用し,指導内容の根拠をデータとして示すことで,両者が同一の技術課題を認識したうえで円滑なフィードバックが可能となる.
なお,評価結果から「艇の傾き」「水中でのオールの動き」といったデータに関するニーズがあることが判明した.艇の傾きについては,複数の受信機を用いることで容易に計測可能である.一方,水中でのオールの動きについては新たなセンサの導入が必要であり,今後の課題である.
7. 関連研究
スポーツの運動分析は数多くの分野で行われている.たとえば,水泳では,単一慣性センサシステムを選手に取り付け取得された情報から泳法を区別し,競泳指導のサポートを手軽に使用可能にするシステムの開発を行っている[8].ほかにも,野球では選手にマーカを付けたり,フォースプレートを敷いたりと複数のセンサを活用することで熟練者と初心者の技術力を定量的に評価する手法も研究されている[9].
さらに,近年では教師なしファインチューニングを用いた単眼3次元姿勢推定モデルに基づくコスト効率の高いモーションキャプチャシステムを提案する研究[2]もある.この研究の手法は特別な機材や測定準備,モデルチューニングのためのアノテーションコストを必要としないため,日常的なスポーツトレーニングにおける動作分析に有用であると考えられる.
漕艇競技においても,運動分析・競技力向上をさせるための研究は陸上と水上の両方から展開されている.
陸上マシンにおける動作を対象とする研究のひとつに柳井らによる実映像と筋活動を重畳表示することで技術力の向上を支援するシステムがある[10].提案システムでは,漕艇競技中の筋活動の情報を技能として抽出し実映像に重畳表示しており,非熟練者が自身の筋活動情報を可視化した映像をリアルタイムで見ながら運動を行うことによりパフォーマンスが大きく向上することが示されている.
一方,水上で漕いでいる選手の分析に関する研究のひとつにG. Dubusらによる艇の速度を音階に変換しフィードバックする手法がある[11].この研究では,音階によるフィードバックはストロークレートに影響を及ぼす一方で,速度変化には影響しないことを実験的に確認している.
また,藤原らはカヌー競技において,DGPSを活用した計測により,500 m全力漕の艇速度,ストロークレート,および1ストロークあたりの推進距離を抽出し,漕動作特性の分類と指導への応用可能性を示している[5].しかし,DGPSは数十cm程度の精度にとどまり,測位の安定性の問題もあるため,1ストローク中に生じる艇速変化や数cm単位の艇の上下動といった微細な挙動を捉えることは困難である.本研究は同様に衛星測位を基盤とした技術分析を行うが,RTK測位を用いることで高精度なデータを取得可能とし,2段階加速の様なストローク内における速度変化や艇の数cm単位の上下動の抽出を実現している.
センサを用いた漕艇動作の解析も進められている.木下らは,IMUセンサと距離センサを用いて選手に対しリアルタイムでフィードバックを行うことで選手の漕艇技術の変化を見る方法を提案している[12].この研究ではボートとオールに距離センサとIMUセンサを取り付け,シートの位置と加速度を計測することで選手の漕艇動作の定量的な評価を行っている.IMUセンサによる姿勢評価の結果から初心者と熟練者の違いがキャッチに現れることが示されている.また,リアルタイムのフィードバックをキャッチタイミングの時間差によってビープ音を鳴らすことで行ったところ,フィードバックを受けた被験者は漕ぎ方を大きく変えようとして,変化の度合いが大きくなりすぎてしまった,という結果が報告されている.前述の柳井らの研究と比べたときに,リアルタイムでのフィードバックが陸上での練習では効果的であったのに対して,水上においては逆効果になる,というのは興味深い事実である.
さらに,TessendorfらはIMUを艇やオールに取り付けることで漕艇技術の改善を支援する方法を提案している.[6].IMUの計測結果から求めた艇の加速度や1ストロークの長さやストロークレートといった技術指標が,技術向上の支援に寄与することを示している.一方でIMUには1章で述べたようにドリフト誤差や積分誤差の問題が存在する.本稿のRTK測位にもとづく提案方法とは相補的な関係にあり,組み合わせることでより多面的な評価が可能になると思われる.
その他,漕艇技術の向上に関する研究は数多く存在する.文献[13]では艇を速く進めるための漕法がいくつか提案されているが,各漕法自体の説明はされているものの,それらが優れているといえる根拠は明らかにされていない.
以上にみられるように漕艇競技の運動分析・競技力向上を図る研究は多数されているが,本研究で取り組んでいるRTK測位による艇の動作の定量的な分析にもとづくアプローチについては,いまだ発展途上であり,我々が知る限りほとんどみられない.自律走行や自律飛行,自動運転,農業自動化[14]等の様々な分野でRTK測位の有用性はよく知られており,漕艇分野においても漕艇技術分析における新しい切り口となる可能性を秘めている.
8. おわりに
8.1 本研究の成果
本研究では,測量・自動運転・建設・農業等の分野で普及が進んでいるRTK測位技術を漕艇分野に導入し,定量的な漕艇技術分析を実現する方法について検討し,ストローク波形による艇の動きの可視化にもとづく分析方法を提案した.現状行われているカメラ映像をもとにした(主観的な解釈が含まれうる)技術分析に対し,提案方法では各選手の漕艇動作を艇の動きと関連付け,客観的な測位データをもとにその特徴を可視化することが可能であり,技術課題の把握や共有に有用である.必要なデータの収集は艇に安価なRTK測位機器を設置するだけでよく,選手の身体へのセンサ装着等も不要なため,競技現場への導入も容易である.
提案方法の有用性について,初心者から日本代表レベルまでの幅広い層を対象とした評価実験を行い,RTK測位データを競技現場で活用するための知見を得た.また,カメラ映像にもとづく技術分析との比較では,5名中4名で提案方法の効果を確認することができた.
8.2 今後の課題
提案方法の適用事例から得られた知見のうち,特に以下の2点についてはさらに究明を進めることで漕艇技術に関する究明が進むと期待される.
- ・ストローク波形の分析により,図19で示したように,技術レベルの高い選手ではストロークごとに艇の加速が2段階にわけて行われる傾向を発見した.このような2段階加速の要因はまだ調査中であるが,選手の体重移動による艇の姿勢の変化が関係していると思われる.
- ・ストローク波形と艇の高度の関連性の分析により,図20で示したように,艇の速度が極大値を迎える時高度は極小値になり,その後,高度が上がるにつれて速度も上昇していくという関係性を見出すことができた.また,高度の極小値の値が小さければ小さいほど速度の2度目の極大値は大きくなる傾向にあることが分かった.従来,ピッチング動作は艇が沈み込むことで水の抵抗が増し,減速を引き起こす要因とされてきた.しかし,本結果はピッチングが必ずしも艇の速度を減少させるわけではなく,再加速を促す可能性があることを示している.
- ・艇の位置情報および方位情報により,図13で示すように,漕艇動作内における蛇行のタイミングと傾向を定量的に捉えることができた.これは特に舵手の技術評価において有効であり,現在行っている横からのカメラ映像を基に技術力を判断をするという曖昧性のある方法を補完する方法としての役割が期待できる.
現場での活用促進という点からは,分析作業の自動化・省力化があげられる.現在は結果の解釈を人手で行っているが,選手の技術上の課題の指摘や現状の技術レベルの推定が自動化できれば,現場への導入のハードルをさらに下げることができる.現在各分野で大きな成果をあげている深層学習ベースの時系列データ解析の適用は自動化を実現するための有望なアプローチと思われる.
艇の速度情報と艇の位置(高度を含む)および姿勢情報の関連性については,現在は着手段階であり,RTK測位による高精度な測位データをもとにしてどのような分析が可能になるのか,検討を進めていきたい.
また,IMUを用いて得られる選手の動きと,RTK測位により得られる艇の動きの関係の分析は興味深いテーマであり,今後取り組む予定である.
謝辞 本研究に協力いただいた選手の方々に心より感謝申し上げます.
参考文献
- [1] 金子和樹:Openposeを用いたサッカー熟練度の分類,人工知能学会全国大会論文集第34回(2020),一般社団法人人工知能学会,pp.3M5GS1205–3M5GS1209 (2020).
- [2] Suzuki, T., Tanaka, R., Takeda, K. and Fujii, K.: Pseudo-label based unsupervised finetuning of a monocular 3d pose estimation model for sports motions, In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp.3315–3324 (2024).
- [3] 木村聡貴,斉藤展士,岡本浩貴,太田 憲:Imuを利用したラグビースクラム時の選手間の協調関係の評価,一般社団法人日本機械学会,シンポジウム:スポーツ・アンド・ヒューマン・ダイナミクス講演論文集2019,pp.A–5 (2019).
- [4] 廣田幸大,中島 求:慣性モーションセンサを用いた水泳用モーションキャプチャシステムの開発,一般社団法人日本機械学会,シンポジウム:スポーツ・アンド・ヒューマン・ダイナミクス講演論文集2018,pp.A–17 (2018).
- [5] 藤原 昌,中村夏実,山本正嘉:カヌーにおけるdifferential gpsを用いた艇の移動様相に関する包括的な評価システムの構築,体育測定評価研究,Vol.10, pp.67–75(2010).
- [6] Tessendorf, B., Gravenhorst, F., Arnrich, B. and Tröster, G.: An imu-based sensor network to continuously monitor rowing technique on the water, IEEE In 2011 seventh international conference on intelligent sensors, sensor networks and information processing, pp.253–258 (2011).
- [7] 後藤勝広,石原 操,井上武久:電子基準点を利用したrtk-gps実験,Technical report,国土地理院時報(1998).
- [8] 高橋弘毅,小林幹京,大前佑斗,酒井一樹,秋月拓磨,塩野谷明:単一慣性センサを用いた競泳指導サポートシステム:プロトタイプ構築とその評価,知能と情報,Vol.32, No.1, pp.544–549(2020).
- [9] 十河宏行,逸見知弘,吉澤恒星,南部彰伸,平山大貴:動作解析を用いた野球打撃動作における技術差の定量的比較,電学論C,Vol.137, No.1, pp.60–67(2017).
- [10] 柳井香史朗,中川純希,温 文,山川博司,山下 淳,淺間 一:実映像と筋活動の重畳表示によるローイング動作教育システム,日本機械学会論文集,Vol.82, No.834, pp.15–00424(2016).
- [11] Dubus, G. and Bresin, R.: Exploration and evaluation of a system for interactive sonification of elite rowing. Sports Engineering, Vol.18, pp.29–41 (2015).
- [12] 木下勝吏:Imuセンサと距離センサを用いたボート競技における漕艇動作の計測と習熟度の定量的評価,Master's thesis,奈良先端科学技術大学院大学(2019).
- [13] Kleshnev, V.: Biomechanics for Rowing Technique and Rigging, 〈https://books-library.net/files/books-library.online-01301454Zs6Q1.pdf〉.
- [14] 松本圭司,小倉康平,西井康人:農業分野でのgnss活用事例,日本ロボット学会誌,Vol.37, No.7, pp.598–602(2019).

us192082@cc.seikei.ac.jp,
satoshi.takeda.zf@east.ntt.co.jp
2023年成蹊大学理工学部情報科学科卒業.同年東日本電信電話(株)入社.漕艇技術の分析に関する研究に従事.
chishiro@st.seikei.ac.jp
1999年東京大学大学院工学系研究科情報工学専攻修士課程修了.同年日立製作所(株)入社.2009年東京大学大学院情報理工学系研究科博士課程修了.博士(情報理工学).2013年成蹊大学理工学部情報科学科准教授.知的情報処理に関する研究に従事.情報処理学会,日本データベース学会,日本ソフトウェア科学会,人工知能学会,システム制御情報学会,画像電子学会,ACM各会員.
採録日 2025年9月10日