建設・⼟⽊現場におけるドローンと地上レーザー,ハンディレーザーを融合した三次元データ活⽤
1.三次元データ活用の意義と研究目的
建設と土木の現場では,老朽化対応,省力化,安全性向上,出来形の客観評価を実現するために,計測から共有と合意形成までを三次元データで一貫させる要求が高まっている.ドローンを含むUAV(Unmanned Aerial Vehicle)写真測量とUAV LiDAR(Light Detection and Ranging),地上レーザースキャナであるTLS(Terrestrial Laser Scanning),ハンディSLAM LiDARは,高密度点群を短時間で取得できる.しかし,単一センサでは遮蔽や反射,GNSS(Global Navigation Satellite System)環境,要求解像度,作業コストの制約が残り,欠測や系統誤差が発生しやすい.この状況に対して,複数センサを計画的に組み合わせるセンサ融合が実務上有効である.
本稿が扱う課題は,3つのセンサの得意領域と制約を踏まえ,現場条件に適合する取得設計と,異なる観測モデルの点群を破綻なく統合する処理と,品質を客観的に保証する枠組みを整備することである.具体的には,共通座標系をJGD(Japanese Geodetic Datum)またはITRF(International Terrestrial Reference Frame)で統一し,基準点と検証点を計画的に配置し,ターゲット基準と地物特徴を併用した位置合わせと全体最適化を標準化する.品質は平面および鉛直のRMSE(二乗平均平方根誤差),断面誤差,体積差で定量評価し,手順とログを記録可能にする.
本研究の目的は,実務で再現可能な意思決定と処理の指針を提示することである.第一に,GNSSの可否,遮蔽の程度,必要点密度,安全要件を入力として,機材構成と飛行や計測のパラメータを導く意思決定フレームを示す.第二に,粗密が混在する点群を前提とした統合処理パイプラインを整理する.第三に,欠測低減や再撮影削減,安全性向上をKPI(Key Performance Indicator)として定義し,生産性と費用対効果を評価する方法を示す.第四に,Web配信やBIMとCIM(Building/Construction Information Modeling)との連携を考慮した成果物とフォーマット設計,運用と保全の要点をまとめる.
本稿の構成は次のとおりである.第2章ではセンサ特性と取得設計を整理する.第3章ではセンサ融合の業務価値と活用モデルを述べる.第4章では統合処理パイプラインと派生成果および配信を示す.第5章では精度と生産性の評価設計を定義する.第6章ではケーススタディにより適用指針を検証する.第7章では研究の総括と適用指針を述べる.
2.センサ特性と取得設計(UAV・TLS・ハンディ)
2.1 観測原理と出力
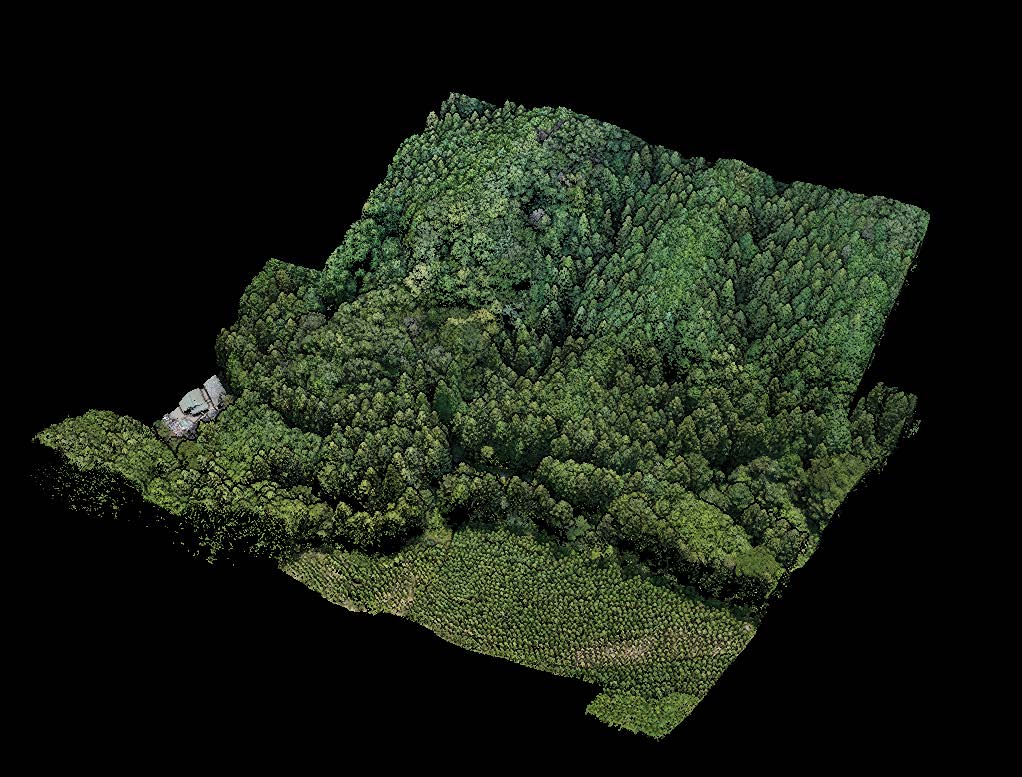
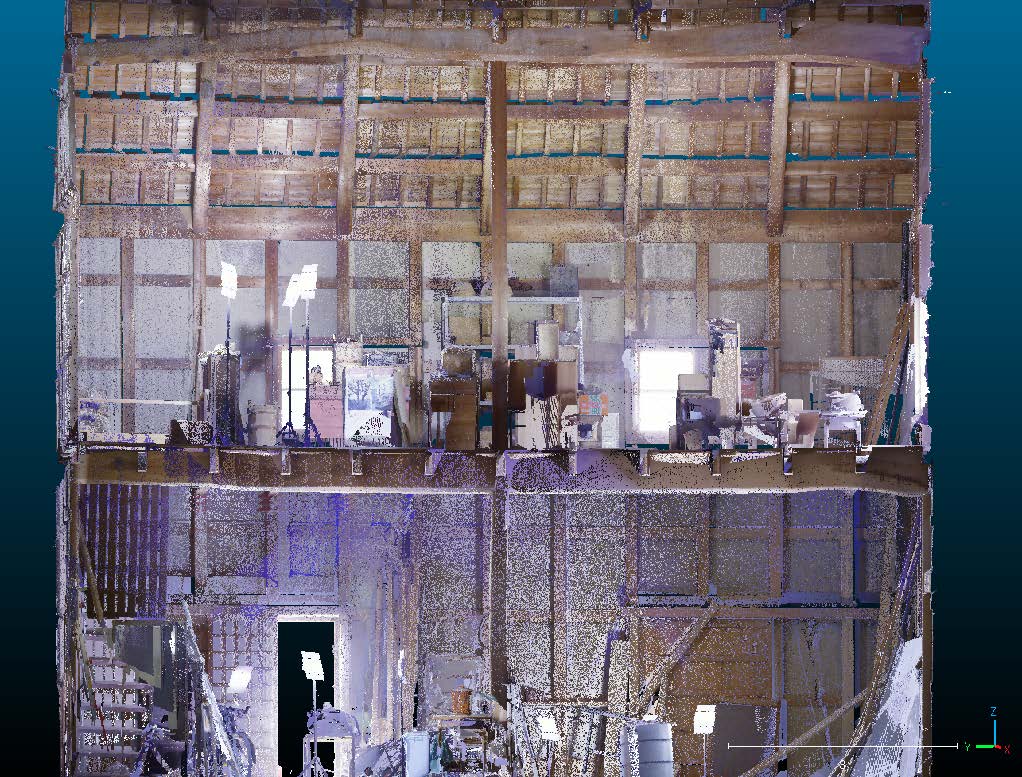
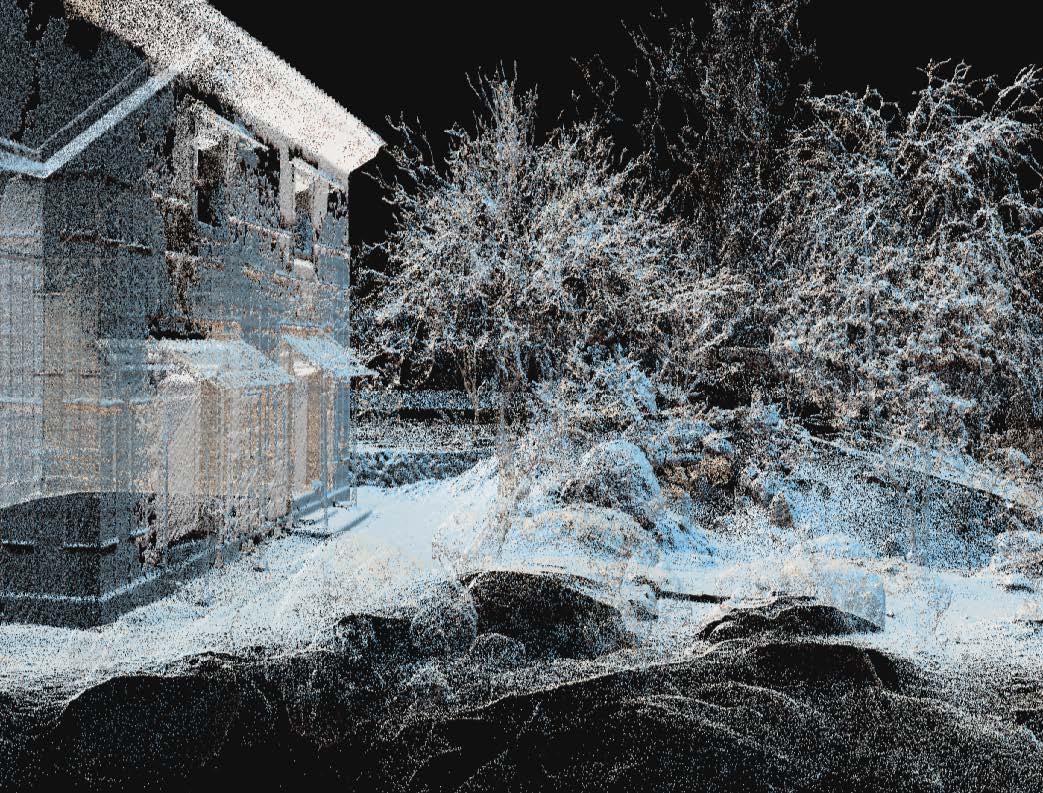
UAV写真測量はSfM(Structure from Motion)の原理に基づき多視点画像から幾何を復元し,オルソ画像,点群,メッシュを生成する.UAV LiDARは飛行体からのレーザーの送受信時間差を計測する能動計測により直接点群を得る(図1).TLSは三脚固定でLiDARの原理により距離と角度を高精度に計測し,高密度点群を取得する(図2).ハンディSLAM LiDARはSLAM(Simultaneous Localization and Mapping)技術による自己位置推定を併用して移動しながら点群を取得する(図3).いずれも三次元点群を出力するが,観測モデルと誤差の性質が異なるため,後段の統合で重みづけと基準の扱いが変わる.
2.2 得意領域と制約
UAVは広域面の迅速取得に強いが,GNSS環境と天候に依存し,屋内や橋梁下面は不得手である.TLSは形状忠実度が高く,測地一貫性を与えやすいが,視線外は欠測となる.ハンディSLAM LiDARは屋内,地下,橋梁下面,樹林帯など遮蔽環境で機動的に有効であるが,長距離でドリフトが累積しやすい.用途別に取得範囲,必要精度,遮蔽の有無で役割分担を行うことが合理的である.
2.3 精度・点密度・運用コストの目安
実務の目安を示す.UAV写真測量は適切なGCP(Ground Control Point)設計時に,平面RMSEがGSD(Ground Sampling Distance)の約2~3倍,鉛直が約3~4倍である.UAV LiDARは高度60~120mで100~300点毎平方メートル,鉛直精度は5~10cm程度である.TLSは10m距離で3~10mm程度の点距離誤差を見込める.ハンディSLAM LiDARは経路長に対するドリフトがおおむね0.1~0.5%である.運用面では,UAVは準備含めて大面積で効率的,TLSは設置と多地点での計測計画が必要,ハンディは単独短時間での補完に適する.これらの値は機種と環境に依存するため,評価は第5章で実測値により確認する.
2.4 取得設計の手順
取得設計は次の順で行う.第一に要求精度と適用範囲を定義する.第二に共通座標系をJGDまたはITRFで決定し,基準点と検証点の数と配置を設計する.第三にセンサの組合せを選定する.面の網羅にUAV,基準形状と基準座標にTLS,遮蔽部補完にハンディを割り当てる.第四にパラメータを具体化する.UAVは高度,GSD,前後・サイド重複率,TLSは地点間隔と視線計画,ハンディは経路計画とループ閉合点である.第五に安全と品質の管理計画を定める.飛行可否,立入管理,気象,冗長取得,バックアップを事前に決める.
2.5 役割分担と統合前提
役割分担の原則は,UAVで面的欠測を抑え,TLSで高精度基準を与え,ハンディで遮蔽部を補完することである.統合ではTLSを幾何基準とし,GCPとCP(Check Point)により測地一貫性を担保する.位置合わせはターゲットと地物特徴を併用し,ICP(Iterative Closest Point)やNDT(Normal Distributions Transform)を重みづけして適用する.重みは観測モデルの信頼度,点密度,視線条件で設定する.統合処理の詳細は第4章で述べる.
2.6 本章の要点と第3章への接続
3つのセンサは得意領域と誤差の性質が異なるため,要求精度と遮蔽条件に基づく役割分担と事前設計が不可欠である.次の第3章では,それらを前提に業務価値と活用モデルを整理し,KPIと意思決定フレームを明確化する(表1).

3.センサ融合の業務価値と活用モデル
3.1 本章の位置づけ
本章は,第1章で示した目的と第2章の取得設計を踏まえ,UAV,TLS,ハンディSLAM LiDARを融合して三次元データを活用する際の業務価値と適用モデルを整理する.
3.2 ユースケース別の融合パターン
代表的な業務に対し,役割分担の原則を示す.
- 土工数量と出来形管理:UAVで全面をカバーし,TLSで基準断面や基準高を与え,法面裏や桝内部はハンディで補完する.数量計算は統合点群から実施する.
- 橋梁・トンネル・河川構造物の点検:上面や周辺地形はUAV,下面やカルバート内部はハンディ,基準となる支持点やアンカ部はTLSで高精度取得する.
- 建築・プラントのas-built:屋根と外装はUAV,設備密集部や屋内動線はハンディ,基準フレームはTLSで拘束する.
- 林冠下や樹林帯の現況把握:地形骨格はUAV LiDAR,歩道や構造物ディテールはハンディ,基準点群はTLSで与える.
- 災害応急・仮設計画:広域状況はUAV,危険個所内部はハンディ,基準測位が必要な個所のみTLSで補う.
これらは第2章の得意領域と制約に対応し,第4章の統合処理で一体化する.
3.3 条件駆動の意思決定フレーム
現場条件から機材と設定を導く流れを定義する.
- 1)環境条件の判定:GNSS可否,遮蔽の分布,必要GSDまたは点密度,立入制限.
- 2)基準の確立:TLSで幾何基準を構築し,GCPとCPで測地一貫性を担保する.
- 3)面的取得の割当:UAV(写真測量またはLiDAR)で作業域を網羅する.
- 4)遮蔽部の補完:ハンディで屋内,下面,狭隘部を計画的にループ閉合しながら取得する.
- 5)パラメータ具体化:UAVは高度,前後・サイド重複率,ハンディは経路長と閉合点,TLSは地点間隔と視線確保を設定する.
- 6)検査計画:KPIと合否基準,差分検出の断面位置,最小限の再取得条件を事前に定義する.
3.4 成果物と活用の設計視点
融合点群は次の成果へ展開しやすい.DEM(Digital Elevation Model)およびDSM(Digital Surface Model),オルソ画像,三角メッシュ,断面群,体積計算票,時系列差分,3D Tilesや3DGS(3D Gaussian Splatting)によるWeb配信である.面的一貫性はUAVが担保し,形状の基準はTLSが与え,遮蔽部の充足はハンディが担うため,単独取得よりも断面連続性と体積計算の安定性が高い.配信とレビューを前提に,LOD(Level of Detail)とファイル分割単位を計画段階で決めることが有効である.統合後の最適化や派生生成の手順は第4章に示す.
3.5 スケール運用とチーム設計
小規模では1名または少人数でUAVとハンディを併用し,TLSは基準点群のみ最小限に取得する.中規模以上ではUAV班,TLS班,ハンディ班を分け,現場内の動線と時間割をあらかじめ同期する.役割は取得責任者,安全管理,基準点管理,処理責任者に分け,ログと設定情報を統一様式で共有する.この分業により待ち時間を減らし,再撮影率を抑制できる.
3.6 想定されるリスクと回避策
主なリスクは,観測モデル差による局所歪み,SLAMドリフトの累積,基準点不足による測地不整合である.回避策は,TLS基準の明確化,ハンディ経路のループ閉合と短区間分割,UAVの重複率確保と冗長飛行である.検査では代表断面の重ね合わせと検証点によるRMSE確認を必須とする.詳細は第5章の評価設計に接続する.
3.7 本章の要点と第4章への接続
センサ融合は,欠測率と精度を同時に改善し,生産性と安全性を高める実務上のメリットをもたらす.本章で定義したKPI,ユースケース別パターン,意思決定フレームは,第4章の統合処理パイプラインと派生成果の具体的手順に直結する.
4.統合処理パイプラインと派生成果・配信
4.1 パイプライン全体像
統合処理は,入力正規化,前処理,初期位置合わせ,高精度位置合わせ,グローバル最適化,統合マージ,地物分類と地形抽出,派生生成,配信設計の順に実施する.第1章の目的と第2章の取得設計,第3章の活用モデルで定めた役割分担とKPIに合致するよう,各段階に品質ゲートを設ける.
4.2 入力正規化
座標系,単位,時刻系,メタデータを統一し,センサ別の観測特性を明示する.TLSを幾何基準とし,UAVとハンディSLAM LiDARを従属として扱う設計が再現性に優れる(表2).
| 対象 | 目的 | 代表手法 | 留意点 |
|---|---|---|---|
| ノイズ除去 | 外れ値除去 | 近傍統計,半径除外 | 点密度を過度に損なわない閾値設定 |
| 正規化 | 反射強度や色の標準化 | ヒストグラムマッチング | 機種差の残存に注意 |
| ダウンサンプリング | 計算量抑制とスケール統一 | 体積グリッド | 位置合わせ段階で解像度を段階化 |
| 法線推定 | 一致評価の安定化 | k近傍推定 | 曲率に応じた自動k選択 |
| 時刻補正 | 連続データの同期 | オフセット補正 | GNSS時刻との差異を記録 |
4.3 初期位置合わせ
TLS基準座標に対し,UAVとハンディを粗合わせする.ターゲット対応,既知姿勢やGNSS軌跡,幾何フィーチャに基づくRANSAC(Random Sample Consensus)推定を併用する.初期誤差が小さいほど後段の収束が安定する.
4.4 高精度位置合わせ
対応点に基づくICP,分布に基づくNDT(Normal Distributions Transform),特徴マッチに基づく広域最適化を使い分ける.堅牢損失関数と重みづけにより観測モデル差を吸収する(表3).
| 段階 | 体積グリッド(m) | 対応閾値(m) | 手法 | 収束判定 |
|---|---|---|---|---|
| 粗合わせ | 0.20~0.50 | 0.50~1.00 | FGR(Fast Global Registration)またはNDT | RMSE変化が1e-3以下か反復上限 |
| 中間 | 0.10~0.20 | 0.20~0.50 | 点対面ICP | RMSEと回転差が閾値以下 |
| 仕上げ | 0.03~0.10 | 0.05~0.20 | 点対点ICP+Huber損失 | RMSEと点間外れ率が安定 |
4.5 グローバル最適化
全スキャンの姿勢とスケールを同時に最適化する.ポーズグラフにTLS結合制約,ハンディのループ閉合,UAVの幾何拘束,GCPの絶対拘束を付与し,重みを観測信頼度と残差統計で更新する.ゲージ固定としてTLS基準フレームを固定し,写真測量由来のスケール偏差がある場合はスケール自由度を開放して調整する.
4.6 統合マージ
重複領域は信頼度と入射角,点密度に基づきブレンドする.属性は優先順位を定めて統合し,色はUAV画像またはカラーTLSで付与する.信頼度マップを同時に出力し,後段の検査に用いる(表4).
| 項目 | 優先基準 | 補足 |
|---|---|---|
| 幾何 | TLS > UAV LiDAR > UAV写真測量 | 法線連続性と残差で二次判定 |
| 色 | UAV写真測量 > カラーTLS > 推定色 | 露光差はバランス補正後に付与 |
| 反射強度 | LiDAR観測 | センサ間で正規化係数を保持 |
4.7 地物分類と地形抽出
進行波形や高さ正規化に基づき,地面,植生,構造物を分離する.地形抽出はCSF(Cloth Simulation Filtering)やPMF(Progressive Morphological Filter),PTD(Progressive TIN Densification)などのアルゴリズムを対象地形と点密度に応じて選定する(表5).
| 環境 | 推奨アルゴリズム | 主パラメータ目安 | 注意点 |
|---|---|---|---|
| 緩斜面の裸地 | PMF | ウィンドウ1.0~5.0m | 突出物は別途除去 |
| 急斜面・法面 | CSF | スティッフネス2~4,粒度0.5~1.0m | 過剰平滑を避ける |
| 樹林帯 | PTD+高さ正規化 | しきい0.5~1.5m | 林床欠測はUAV LiDARで補完 |
| 都市部 | 複合ルール | 平滑+高さ+平面性 | 屋根と地面の誤判別に注意 |
4.8 派生生成
統合点群からDEM,DSM,オルソ画像,三角メッシュ,断面群,体積計算票,時系列差分を生成する.LOD設計とタイル分割を早期に決定することで配信を円滑にする(表6).
| 成果物 | 入力 | 主手順 | 主パラメータ | 想定用途 |
|---|---|---|---|---|
| DEM | 地面点群 | 補間,グリッド化 | 解像度0.1~0.5m | 計画比較,排水検討 |
| DSM | 全点群 | 最大値投影 | 解像度0.1~0.5m | 景観検討,被覆解析 |
| オルソ画像 | 画像+外部標定 | 放射補正,縫合 | GSD,縫合幅 | 出来形確認 |
| 三角メッシュ | 統合点群 | DelaunayまたはPoisson | 目標三角形数,法線整合 | BIM連携,可視化 |
| 断面群 | 統合点群 | サンプリング,平滑 | ピッチ5~20m | 数量計算,合意形成 |
| 体積計算票 | DEMまたはTIN(Triangulated Irregular Network) | 差分積算 | 格子解像度 | 施工管理 |
| 時系列差分 | 時系列DEMまたは点群 | 同次化,差分 | 高さ閾値 | 変状監視 |
4.9 配信設計
配信は3つの観点で設計する.第一にフォーマットである.点群は3D Tilesの点群仕様,メッシュは3D TilesのバッチまたはglTF(GL Transmission Format)を用いる.第二にLODとタイル分割である(図4).

1~5段のLODを設定し,タイルの空間サイズと点数上限を定める.第三に運用である.メタデータの同梱,アクセス制御,キャッシュ戦略,オフライン配布用の分割アーカイブを準備する(表7).
| 資産 | タイル辺長 | 点数または面数上限 | LOD段数 | 備考 |
|---|---|---|---|---|
| 点群 | 50~200m | 50~200万点 | 3~5 | レベル間で点を再利用 |
| メッシュ | 50~200m | 10~50万面 | 3~4 | 正射と陰影を切替可能 |
| オルソ | 256~1024px | 画像タイル | 3~6 | WMTS(Web Map Tile Service)互換で配信 |
4.10 品質ゲートと再処理条件
各段階でKPIと合否基準を判定し,閾値超過時は段階的に戻す.位置合わせ段階では残差の空間偏り,グローバル最適化段階ではループ閉合誤差とGCP残差,派生生成段階では断面誤差と体積差を確認する.再処理は原因を切り分け,前段の設定変更から最小範囲で行う.
4.11 ログと再現性の確保
プロジェクトID,座標系,機材と版,取得時刻,前処理設定,位置合わせ手法と最終残差,最適化の重みと収束状態,生成パラメータ,検査結果を機械可読で保存する.ファイルにはハッシュ値を付与し,版管理で追跡可能にする.
4.12 本章の要点と第5章への接続
本章は,TLS基準を核とした位置合わせと最適化により,UAVとハンディSLAM LiDARを破綻なく統合し,活用可能な派生成果へ展開する手順を示した.次の第5章では,ここで定義した品質ゲートに対応する評価設計を定量的指標で提示し,精度と生産性の両立が達成されているかを検証する.
5.精度と生産性の評価設計
5.1 章の位置づけ
本章は,第1章の目的とKPI,第2章の取得設計,第4章の統合処理を前提に,幾何精度と生産性を定量的に評価する方法を定義する.対象は統合点群および派生成果であり,受入基準と再処理判定までを一体で設計する.
5.2 評価対象とKPI
評価は完全性,幾何精度,一貫性,生産性の四系統で行う(表8).
| 系統 | 指標 | 定義 | 算出方法 | 典型的な参照値の目安 |
|---|---|---|---|---|
| 完全性 | 欠測率 | 必要領域に対する未取得体積の比率 | 体積ボクセル化による空隙率評価 | 単独取得比で20~60%低減 |
| 幾何精度 | 平面RMSE | 検証点の水平誤差のRMSE | RMSEh=sqrt(Σ(dx²+dy²)/n) | 写真測量はGSDの2~3倍程度 |
| 鉛直RMSE | 検証点の鉛直誤差のRMSE | RMSEz=sqrt(Σ(dz²)/n) | UAV LiDARで5~10cm程度 | |
| 断面誤差 | 代表断面の平均偏差と最大偏差 | 断面差分の平均,max | 最大偏差の顕著低減 | |
| 体積差 | 基準モデルとの差の相対誤差 | ΔV%= | (Vt−Vref)/Vref | |
| 一貫性 | ループ閉合誤差 | SLAM経路の始終点ずれ | 始終点間の距離比[%] | 0.1~0.5%程度 |
| 生産性 | 再撮影率 | 一次取得で不合格となった割合 | 再取得件数/全案件 | 半減を目標 |
| 現地滞在時間 | 設置から撤収までの時間 | 行程ログの集計 | 面的はUAVで大幅短縮 | |
| 処理時間 | 前処理から派生生成までの時間 | ログ自動集計 | 段階ダウンサンプルで短縮 |
5.3 サンプリング設計
評価の信頼性はサンプリングで決まるため,層化と冗長性を設ける(表9).
| 対象 | 最低サンプル | 配置原則 | 補足 |
|---|---|---|---|
| 検証点 CP | 10点以上 | 作業域の外周と内部を層化し均等配置 | GCPと独立に設置 |
| 代表断面 | 5断面以上 | 勾配変化点,法面,構造物縁部を通過 | ピッチ5~20mを基本 |
| 欠測評価ボクセル | 0.25~1.0m | 対象用途のLODに整合 | 樹林帯は粗めから評価 |
| 再現性用再取得区画 | 1~2区画 | 代表地形を選定し同日再計測 | 日時差は記録必須 |
5.4 幾何精度評価の手順
手順は基準選定,誤差計算,統計確認の3段階である.
- 1)基準選定ではTLSを幾何基準とし,必要に応じて現地測量の既知点を併用する.
- 2)誤差計算ではRMSEh,RMSEz,断面差分,体積差を算出する.RMSEは外れ値の影響を抑えるためにパーセンタイルクリッピングを併用する.
- 3)統計確認では残差の空間偏りをヒートマップで可視化し,系統誤差の有無を判定する.
5.5 一貫性評価(グローバル整合)
ポーズグラフ最適化後のループ閉合誤差,TLS地点の結合残差,GCP残差を確認する.いずれかが閾値を超える場合は第4章の重みと拘束条件を見直す(表10).
| 観点 | 指標 | 典型閾値の目安 | 処置 |
|---|---|---|---|
| SLAM閉合 | 閉合誤差/経路長 | 0.5%以下 | 経路分割と閉合点増設 |
| TLS結合 | ターゲット残差 | 数mm~1cm台 | 地点追加,遮蔽再取得 |
| 測地拘束 | GCP残差 | 目標RMSE内 | GCP再測と重み再設定 |
5.6 生産性評価とコストモデル
生産性は時間,手戻り,人数,計算資源で評価する(表11).
| 項目 | 定義 | 計算 | 解釈 |
|---|---|---|---|
| 現地総時間 | 準備,移動,設置,取得,撤収の合計 | Σ各工程時間 | 安全配慮の上で最小化 |
| 処理総時間 | 前処理~配信の合計 | ログ自動集計 | 段階解像度で短縮 |
| 再撮影率 | 再取得案件の割合 | 再取得件数/全案件 | 計画の妥当性を反映 |
| 工数 | 人時の総和 | 人数×時間 | 分業最適化の評価 |
| 直接コスト | 機材稼働+人件+クラウド | 単価×数量 | ROI算出の基礎 |
| ROI | 融合導入の投資対効果 | (基準コスト−実績)/投資 | 期間を明示して算出 |
基準コストは単独センサ運用の実績平均とし,実績は3センサ融合の結果とする.ROIは導入後一定期間で再評価する.
5.7 可視化とレポーティング
評価結果は地図とグラフで可視化する.欠測はボクセル空隙率マップ,幾何精度は残差ヒートマップとヒストグラム,一貫性はループ閉合のスパイダ図,生産性はガントチャートで表現する.レポートはKPIダッシュボード,詳細統計,再処理判断の3部構成とし,再現性を担保する.
5.8 受入基準と再処理判定
用途に応じた合否を事前に定義し,閾値を超過した場合は原因に応じて段階的に戻す(表12).
| 用途 | 主要合否指標 | 合否の目安 | 再処理の主因 | 戻す段階 |
|---|---|---|---|---|
| 土工数量 | 体積差,断面最大偏差 | ΔV%が数%以内,断面maxが所定値以内 | 欠測残留,位置合わせ不足 | 第4章の統合マージ前 |
| 構造物維持 | RMSEh,RMSEz,局所歪み | RMSEが目標範囲,局所偏りなし | 観測モデル差,結合残差 | 高精度位置合わせ |
| 林冠下現況 | DEM精度,欠測率 | RMSEz達成,欠測低 | 地面抽出失敗 | 地形抽出と前処理 |
| 屋内 as-built | ループ閉合,局所一致 | 閉合良好,局所差小 | SLAMドリフト | 経路設計と閉合強化 |
5.9 実験設計テンプレート
案件開始時に次のテンプレートを用いると評価が標準化される.
- 1)評価計画票:KPI,閾値,サンプリング数,代表断面位置.
- 2)取得ログ票:機材,版,時刻,パラメータ,天候,安全事項.
- 3)処理条件票:前処理,位置合わせ手法,重み,収束条件.
- 4)検査結果票:RMSE,断面差分,体積差,閉合誤差,合否.
- 5)差分報告票:再処理の原因,変更個所,効果の定量報告.
5.10 本章の要点と第6章への接続
本章は,完全性,幾何精度,一貫性,生産性の四系統で評価を設計し,受入基準と再処理判定までを定義した.次の第6章では,この評価設計に基づくケーススタディを通じて,センサ融合の適用指針と業務価値を検証する.
6.ケーススタディと適用指針
6.1 章の位置づけと設計方針
本章は,第1~5章で定義した目的,取得設計,統合処理,評価設計に基づき,代表的な現場条件でのセンサ融合の効果を検証する.対象は土工数量・出来形管理,橋梁・トンネルの点検の2事例である.各事例は,取得条件,統合設定,評価KPIを共通枠で示し,単独センサ運用との比較で効果を定量化する.
6.2 事例A:土工数量・出来形管理(開放地 0.52km²)
条件と目的.平坦~緩斜面の造成地で,体積計算と断面確認を高い再現性で行うことを目的とする.風速4m/s程度,視界良好である(表13,表14).
| 項目 | 設定 |
|---|---|
| UAV写真測量 | 高度90m,GSD 2.3cm,前後80%・サイド70% |
| TLS | 地点間隔30m,ターゲット共通視認3点以上/地点 |
| ハンディ | 需要小のため最小限(桝内部と擁壁背面のみ,ループ2カ所) |
| 統合 | TLS基準,NDT→点対面ICPの2段,Huber損失/仕上げ |
| 評価 | CP 12点,代表断面6本,体積基準TINに対する差分 |
| 指標 | 単独:UAVのみ | 融合:UAV+TLS(+一部ハンディ) |
|---|---|---|
| 欠測率(体積ボクセル 0.5m) | 7.8% | 1.9% |
| 平面RMSE(cm) | 5.6 | 3.1 |
| 鉛直RMSE(cm) | 9.8 | 4.7 |
| 断面最大偏差(cm) | 8.5 | 4.0 |
| 体積差 ΔV% | 3.8% | 1.2% |
| 現地滞在時間(h) | 4.1 | 4.8 |
| 再撮影率 | 14% | 4% |
考察.TLSを幾何基準に据えることで鉛直精度と断面連続性が顕著に改善した.現地時間はやや増加したが,再撮影率が低下し総工数は純減となった.
6.3 事例B:橋梁下面+河川区間点検(延長 420m)
条件と目的.橋面・河床・橋梁下面を一体で把握し,下面の欠測を抑えた統合点群を得ることを目的とする.河川勾配が大きく,欄干と桁下面が遮蔽を生む(表15,表16).
| 項目 | 設定 |
|---|---|
| UAV | 高度70m,GSD 1.8cm,斜め撮影を併用(±25°) |
| TLS | 桁両側に地点展開(20m ピッチ),下面ターゲットを仮設 |
| ハンディ | 桁下面・橋脚周りを周回,ループ閉合4カ所 |
| 統合 | TLS基準,FGR(Fast Global Registration)→ICP,下面は点対点ICPで仕上げ |
| 評価 | CP 10点,下面断面5本,ループ閉合誤差 |
| 指標 | 単独:UAV+TLS | 融合:UAV+TLS+ハンディ |
|---|---|---|
| 欠測率(下面領域) | 23.4% | 3.7% |
| 下面断面 最大偏差(cm) | 6.9 | 3.1 |
| ループ閉合誤差/経路長 | ― | 0.28% |
| 現地滞在時間(h) | 5.0 | 5.6 |
| 合意形成リードタイム(d) | 5日 | 3日 |
考察.ハンディの補完により下面の欠測が大幅に解消され,点検レポートの作成とレビューが迅速化した.ループ閉合の管理によりSLAMドリフトは許容範囲内に収まった.
6.4 本章の要点と第7章への接続
2事例の結果から,TLSを幾何基準としてUAVとハンディを役割分担させる設計が,欠測率,鉛直精度,断面連続性,生産性に一貫した改善をもたらすことを示した.次の第7章では,本研究全体を総括し,適用指針を再提示する.
7.研究の総括と適用指針
7.1 目的と範囲の再確認
本研究は,UAV,TLS,ハンディSLAM LiDARを計画的に融合し,欠測率,幾何精度,生産性,安全性を同時に高める実務指向の枠組みを提示することを目的とした.第1章で課題と目的を定式化し,第2章でセンサ特性と取得設計を整理し,第3章で活用モデルとKPIを定義し,第4章で統合処理パイプラインを具体化し,第5章で評価設計を確立し,第6章でケーススタディにより効果を定量検証した.
7.2 中核知見(センサ融合の原則)
得られた知見は次の3点に集約される.第一に,TLSを幾何の錨とし,UAVで面的網羅,ハンディで遮蔽補完という役割分担が最も安定である.第二に,共通座標系の統一とGCP/CP設計,ターゲットと地物特徴を併用した段階的な位置合わせが測地一貫性を担保する.第三に,品質ゲートをパイプライン各段に設け,RMSE,断面誤差,体積差,閉合誤差を用いて段階戻りを許容する運用が再撮影率の低減に寄与する.
7.3 効果の要約(KPIベース)
2事例の結果を総合すると,代表的な改善幅は表17のとおりである(条件依存).
| 観点 | 単独運用の課題 | 融合適用時の改善幅 |
|---|---|---|
| 欠測率 | 遮蔽部や下面に穴が残る | 60~85%低減 |
| 鉛直RMSE | 写真測量由来の系統差 | 30~60%改善(TLS基準) |
| 断面最大偏差 | 断面の段差・不連続 | 40~60%低減 |
| 体積差 ΔV% | 算定値のばらつき | 数%台に安定化 |
| 再撮影率 | 合否未達での手戻り | 約1/2に低減 |
| 合意形成リードタイム | レビューに時間を要する | 数日規模で短縮 |
7.4 実務適用の設計指針
適用時は次の原則に従うのが有効である.
- 1)条件駆動の意思決定:GNSS可否,遮蔽分布,必要点密度,立入制限を入力に,3センサの比重を決める.
- 2)TLS基準の確立:地点計画と共通ターゲットを確保し,GCP/CPで測地一貫性を拘束する.
- 3)段階的位置合わせ:粗合わせ→中間→仕上げの3段で解像度と閾値を下げつつ収束させる.
- 4)品質ゲート運用:RMSE,断面差,体積差,閉合誤差を閾値で監視し,段階戻りと最小範囲再処理を徹底する.
- 5)配信を前提とした設計:LOD,タイル分割,レビュー観点(代表断面,差分ハイライト)を計画段階で決める.
7.5 限界と今後の課題
限界は3点に整理できる.第一に,観測モデル差に起因する局所歪みが環境により残存し得る.第二に,長距離SLAMでドリフトが累積し,閉合点の設計が不十分な場合に局所ずれが発生する.第三に,大規模運用では版管理とアクセス制御がボトルネックになりやすい.今後は,初期合わせの自動化,地物分類の学習モデル化,パイプライン内でのKPI自動算出,速報LODのリアルタイム配信,IFC(Industry Foundation Classes)やglTF/3D Tilesとの双方向連携の高度化が課題である.
7.6 本研究の貢献の再確認
本研究は,実務で再現可能な形で,①条件駆動の意思決定フレーム,②TLS基準を核とする統合処理パイプライン,③RMSE,断面誤差,体積差,閉合誤差を用いた評価設計,④ユースケース別の適用指針と期待効果を提示した.これにより,三次元データの取得から配信までを一貫した論理で設計できることを示した.
7.7 結語
センサ融合は,欠測率と精度を同時に改善しつつ生産性と安全性を高める有効な実務解である.TLSを幾何基準とし,UAVで面的網羅,ハンディで遮蔽補完という役割分担を採用し,品質ゲートに基づく段階運用を実装すれば,土工数量,構造物維持,屋内外のas-built,樹林帯の現況把握において,安定した成果と合意形成の迅速化が実現できる.本研究の枠組みは,今後の自動化とリアルタイム更新への発展を許容しつつ,現場適用に耐える実装指針として機能する.
参考文献
- 1)国土地理院:日本の測地系(JGD2024),https://www.gsi.go.jp/sokuchikijun/datum-main.html(参照 2025-08-29).
- 2)国土地理院:UAVを用いた公共測量マニュアル(案)(平成29年3月改定),https://www.gsi.go.jp/KOUKYOU/sokuryosidou41042.html(参照 2025-08-29).
- 3)国土地理院:LidarSLAM技術を用いた公共測量マニュアル(令和7年4月改正),https://www.gsi.go.jp/gijyutukanri/gijyutukanri41024.html(参照 2025-08-29).
- 4)国土交通省:BIM/CIM活用ガイドライン(案)第1編 共通編,https://www.mlit.go.jp/tec/content/001395762.pdf(参照 2025-08-29).
- 5)国土交通省:3次元計測技術を用いた出来形管理要領(案),https://www.mlit.go.jp/tec/constplan/content/001880735.pdf(参照 2025-08-29).
- 6)国土交通省:地上型レーザースキャナーを用いた出来形管理要領(土工編)(案),https://www.hrr.mlit.go.jp/gijyutu/i_Construction/youryou_kijun/11kisaikensa/11_2_reza_dekidaka_doko.pdf(参照 2025-08-29).
- 7)国土交通省:地上型レーザースキャナーを用いた出来形管理要領(舗装工事編)(案),https://www.hrr.mlit.go.jp/gijyutu/i_Construction/youryou_kijun/11kisaikensa/11_3_reza_dekidaka_hoso.pdf(参照 2025-08-29).
- 8)国土交通省(Project PLATEAU):3D都市モデル標準製品仕様書 第4.0版,https://www.mlit.go.jp/plateau/file/libraries/doc/plateau_doc_0001_ver04.pdf(参照 2025-08-29).
- 9)国土交通省(Project PLATEAU):3D都市モデルの導入ガイダンス(第4.0版),https://www.mlit.go.jp/plateau/file/libraries/doc/plateau_doc_0000_ver04.pdf(参照 2025-08-29).
- 10)Project PLATEAU:PLATEAU配信サービス(試験運用)チュートリアル,https://github.com/Project-PLATEAU/plateau-streaming-tutorial(参照 2025-08-29).
茂庭遼太郎
moniwa@asolab.co.jp
(株)ASOLAB.で複数センサを用いた点群取得と効果的なセンサ融合を行った点群作成業務に従事.測量士補.
採録決定:2025年10月24日
編集担当:森村吉貴(京都大学)