ITで実現するドローンの安全性
本稿では本テーマに対し,IT技術で改善,解決を図ろうとした取り組みについて紹介する.
第1章ではドローン自身が標準的な機能として備えている,あるいは備えつつある安全機能全般について説明する.
第2章では実際に発生したドローンの事故を分析し,事故状況や事故原因からIT技術で補完すべきドローンの安全性機能を推察する.
第3章ではドローンにIT技術を組み込む方法論と,実際に取り組んだITによるドローンの安全性向上施策を実例をもって紹介する.
第4章ではIT技術による安全性向上施策を組み込んだドローンを用いた実証実験の背景やその様子を紹介し,また残課題についても記述する.
第5章ではこれまでの取り組みを踏まえた今後の展望やIT技術を組み込んでいく際の課題について説明する.
1.ドローンの現状と安全性
1.1 ドローンの活躍フィールド
主にエンタメやメディア業界で空撮映像の活用から始まったドローンの活用であるが,現在ではさまざまな分野で多岐にわたって活用されるようになってきている.
- 農業分野では,農薬散布や種まきの自動化,畑の状態モニタリングなど,効率的な農業管理を実現している.
- 測量や建設の現場においては,土地の3Dマッピングや建設進捗管理,インフラ点検に利用されている.
- 物流分野では,主に離島や山間部への物資輸送に活躍し,災害時の救援物資の配送にも重要な役割を果たしている.
- 災害発生時には被害状況をリアルタイムで撮影し,避難経路の確認や消防活動を支援するために活用されている.
その他,現在におけるドローンの活躍フィールドの詳細を知りたい場合は,文献[1],文献[2]等を参照されたい.
このようにドローンは農業・物流・災害対応など多様な分野で活用が進み,社会に浸透しつつある.これにより,できるだけではなく,より安全にできることが,強く求められるようになってきている.
1.2 ドローンに備わる安全性
ドローンの安全性を論ずる上で,まず現在標準的に利用されているドローンの安全にかかわる機能について概観してみたい.
1.2.1 プロペラガード
ドローンは回転するプロペラを機体の四隅に備える構造が一般的なため,壁などへの接触に対して脆弱である.このプロペラを保護するために,周囲からプロペラを囲うプロペラガードがよく利用されている(図1).特に点検用小型ドローンなどは狭小空間を飛行する必要があり,壁や天井と接触する可能性が高い.そのため,プロペラだけでなく,ドローンの周囲360度を球体状のガードで囲むこともある.

1.2.2 衝突回避
壁や障害物を検知し,その手前で停止したり避けたりする機能である.一般に以下のような仕組みで実装されている.
- A)視覚センサー(ビジョンセンサー)
機体に備えた衝突回避用カメラ(魚眼レンズや広角レンズなど)により,周囲の情報を光学的に認識し衝突を回避する.
- B)ToF(Time of Flight)
光や電波を対象物に向けて発信し,反射または散乱して戻ってくる時間を計測することで対象物までの距離を測定し,衝突を回避する仕組みである.LiDARもToF(Time of Flight)技術の一種ではあるが,LiDARは主に点群作成のために活用されるのに対し,ドローン自身が搭載する衝突回避用のToF技術としては,赤外線を用いた簡易的な方式が中心的に用いられている.
- C)超音波センサー
ToF技術と構造的には同一であるが,電波の代わりに音波を利用する方法となる.ドローンにおいては主に地上までの距離を測定し,地面への衝突を防止するためにこの技術が利用される.
- D)ADS-B(Automatic Dependent Surveillance-Broadcast)
主に航空機(飛行機やヘリコプター)同士が衝突を回避するためのシステムである.自身の位置情報をブロードキャスト配信することで自機と他機の位置把握を行い,空中衝突を防止する機能である.元々は航空機間の衝突防止を目的として開発されたが,近年ではドローンにもADS-Bが搭載されるケースが増加しており,航空機とドローン,あるいはドローン相互の空中衝突回避にも活用されている.
1.2.3 機器の冗長化
重要な部品やシステムを多重に準備しておくことで,一部が故障した場合でも他の部分が機能し続けられるようにするものである.ドローンにおいてよく見られる冗長化の例として,バッテリーとプロペラが挙げられる.大型産業用ドローンの場合,バッテリーは2本以上並列接続され,1本の給電が途絶えても飛行を継続できる仕組みが採用されているケースが多い.またドローンは標準的には4枚のプロペラを備えるが,それを6枚や8枚に増やすことで,一部のプロペラやモーターが破損しても,残りのプロペラで安定飛行を継続できる設計も取り入れられている(図2).

また,IMU(Inertial Measurement Unit,慣性計測装置)やGNSS(Global Navigation Satellite System,全球測位衛星システム)など,正確な位置制御や航路維持に必要な機器についても,多重化されるケースが多い.これらの技術はさらに発展し,フライトコントローラー自体を冗長化する事例も現れてきた.これら飛行上重要な機器を冗長化していくことは,航空機の設計思想と共通している.
1.2.4 通信の冗長化
ドローンならではの重要な冗長性要件として,通信システムの冗長化が挙げられる.ドローンは通常,遠隔操縦を行うため,地上との持続的な通信が必須である.従来は,2.4GHz帯を使用したシングルコントローラー接続が主流だったが,今では複数のコントローラーを同時に接続可能とし,通信が切断される前に他方に切り替える仕組みや,異なる周波数帯の地上局との並列通信を実現する仕組みが普及してきている.
加えて,LTE(Long Term Evolution)の空中利用が可能になったことから,携帯電波網を介した通信機能を備えたドローンが出現した(図3).これにより,2.4GHz帯では難しかった長距離通信が実現するだけでなく,通信経路の多重化という面でも広く用いられるようになってきている.

1.2.5 バッテリー残量の管理
ドローンを飛行させる上で,常にバッテリーの残量を確認することが不可欠である.ドローンで利用されるリチウムポリマー電池は,大きな出力を生み出すことが可能であるが,その持続時間は長くても50分程度である.一般的に,ドローンのコントローラーには,バッテリー残量をリアルタイムで表示する機能が搭載されており(図4),さらに残量が低下した場合には,音響による警告を発する機種も多い.なお,一部産業用のドローンにおいては,バッテリー残量を充電容量ではなく電圧で表示する設計のものがあり,このような機種を利用する際には特に注意が必要である.また,バッテリー残量が低下した際,自動的にRTL(Return to Launch,後述)を実行できる機能を持つドローンも増えてきている.

1.2.6 RTL(Return to Launch)
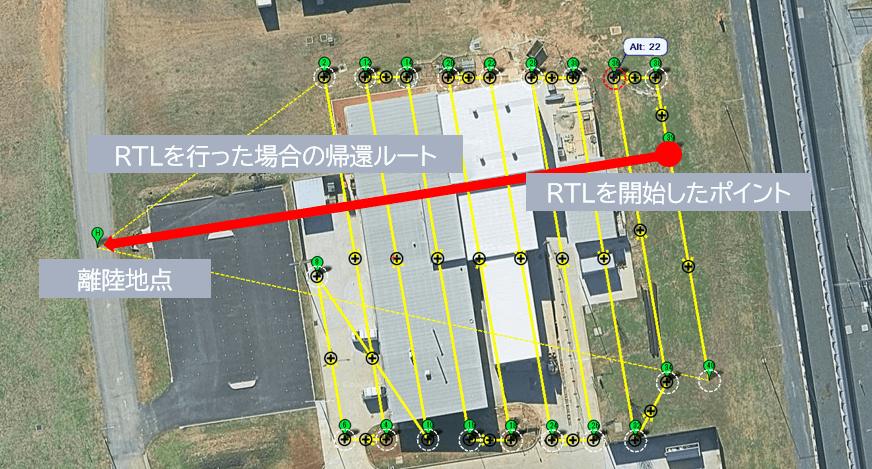
RTL機能は,通信の途絶やバッテリー残量低下などの異常事態が発生した際に,ドローンを自動的に離陸地点まで帰還させる仕組みである.一般的なRTL動作プロセスとして,まずは障害物を避けるため高高度まで上昇した後,離陸地点へ向けて直線的に移動する(図5).その後,着陸地点付近で高度を下げるという手順を踏む.しかしながら,直線的な帰還コースでは障害物と衝突するリスクが考えられるため,より高度なメカニズムとして,過去の飛行経路データを記録し,その飛行経路を逆順になぞって帰還する機能を備えるドローンも登場している.重要な注意点として,RTL動作プロセスはGNSS信号に依存している.GNSS信号が不安定な場合や,完全に途絶している状況では,正確な帰還ができない可能性がある.このため,GNSSの健全性を常に確認することが運用上必要である.
1.2.7 バーチャルフェンス
バーチャルフェンスとは,空間上に仮想的な枠を設定することで,ドローンがその枠を超えて飛行しないように制御する機能である.枠内で経路を指定して自律飛行を行う場合,基本的に枠からの逸脱は発生しない.しかし,人間が手動で操縦する場合には,操作ミスや障害物などの影響で飛行可能区域から逸脱する危険性がある.バーチャルフェンスはこの問題に対処するため,事前に飛行可能な領域を定義しておく仕組みである(図6).これにより,手動操作において誤操作が発生しても,ドローンが指定された領域外に出ることを防ぐことができる.なお,この機能を利用するためには,GNSS信号を受信していることが前提で,屋内などGNSSの利用できない環境では機能しない.

1.3 ドローン安全性の課題
本章で説明してきたように,ドローンにはハードウェアとして実装されたさまざまな安全機能が備わっている[3].しかし,航空機の操縦士が行うような高度な状況判断や柔軟な危機対応力が求められる場面は依然として多く,ドローンに備わっている安全機能だけでは対応しきれないケースも存在する.次章では,ドローンで実際に発生した事故を分析し,ドローンの安全対策としてさらに何が必要なのかを掘り下げていく.
2.ドローンの事故
2.1 分析対象について
本章では2019年度から2021年度までの,無人航空機にかかわる事故等の一覧(国土交通省 文献[4][5][6])をもとに,本稿にて分類・分析を実施した内容について紹介する.若干古い情報に基づくものとなるが,これは2022年12月5日に改正航空法が施行され,報告対象の事故,重大インシデントに該当する事象が絞られたことにより全体傾向がつかみにくくなったことが理由である.
なお,2022年度以降の分析については文献[7]も参照されたい.
2.2 事故状況
事故状況を紛失,墜落,衝突,その他で分類すると,2019年は衝突が有意に多い状況であったが,2021年には紛失が同程度に迫っている(図7).

従来は目視の範囲で利用されてきたドローンだが,通信性能の向上などにより目視外での飛行やより広い範囲での活用と合わせて紛失に至るケースが増加してきたものと推察できる.
また,ドローンは衝突回避の機能を有することが一般的になってきているが,依然として衝突が多い事実も見受けられる.前章で紹介したビジョンセンサーやToFを用いた衝突回避は有効に機能することもある一方,電線や細かい木の枝葉のように視認性や電波の反射が少ないものに対しては十分に機能できていない事実が見て取れる.
2.3 事故原因
事故原因に目を向けると人為的なミスが約半数を占めるが,他方,機体異常や通信異常も原因となっている事実が見て取れる(図8).

ドローンはさまざまなセンサーや動力が連動して動作している精密機械の側面があり,運用を続けていく中ではどうしても劣化や故障が発生し得る.またドローンが一般的に利用している電波はISMバンド(Industrial, Scientific and Medical band)である2.4Ghz帯であることが多く,これは他の通信(Wi-Fi,Bluetooth等)でも用いられる周波数帯で電波干渉が発生する危険性が常に付きまとう.
さらにGNSSに対する過信も事故につながり得る.橋梁下部,トンネル,山間部などの地形では,上空が遮断されたり,マルチパス(GNSS電波の反射)が発生することにより,ドローンが自己位置を把握できなくなったり,予定航路から逸脱してしまうことがある.自己位置を見失った,あるいは誤解したドローンが思いもよらない挙動をすることがあり,それが操縦ミス,衝突を誘発しているケースも散見される.
2.4 事故低減に向けて
次章以降では,前章の機能だけではカバーしきれない安全性の課題を,IT技術を用いて補完・実現していく取り組みを記載する.
なお,ドローンの安全性確保には,ハードウェアやソフトウェアの技術的対策だけでなく,運用マニュアルの整備,操縦者の技能向上,規制遵守[8]など,多層的なアプローチが不可欠である.しかし,本稿では主に技術的ソリューションに焦点を当てているため,これらの側面については詳しく触れていないことをご承知いただきたい.
3.ドローンの安全性におけるITの役割
3.1 コンパニオンコンピューター
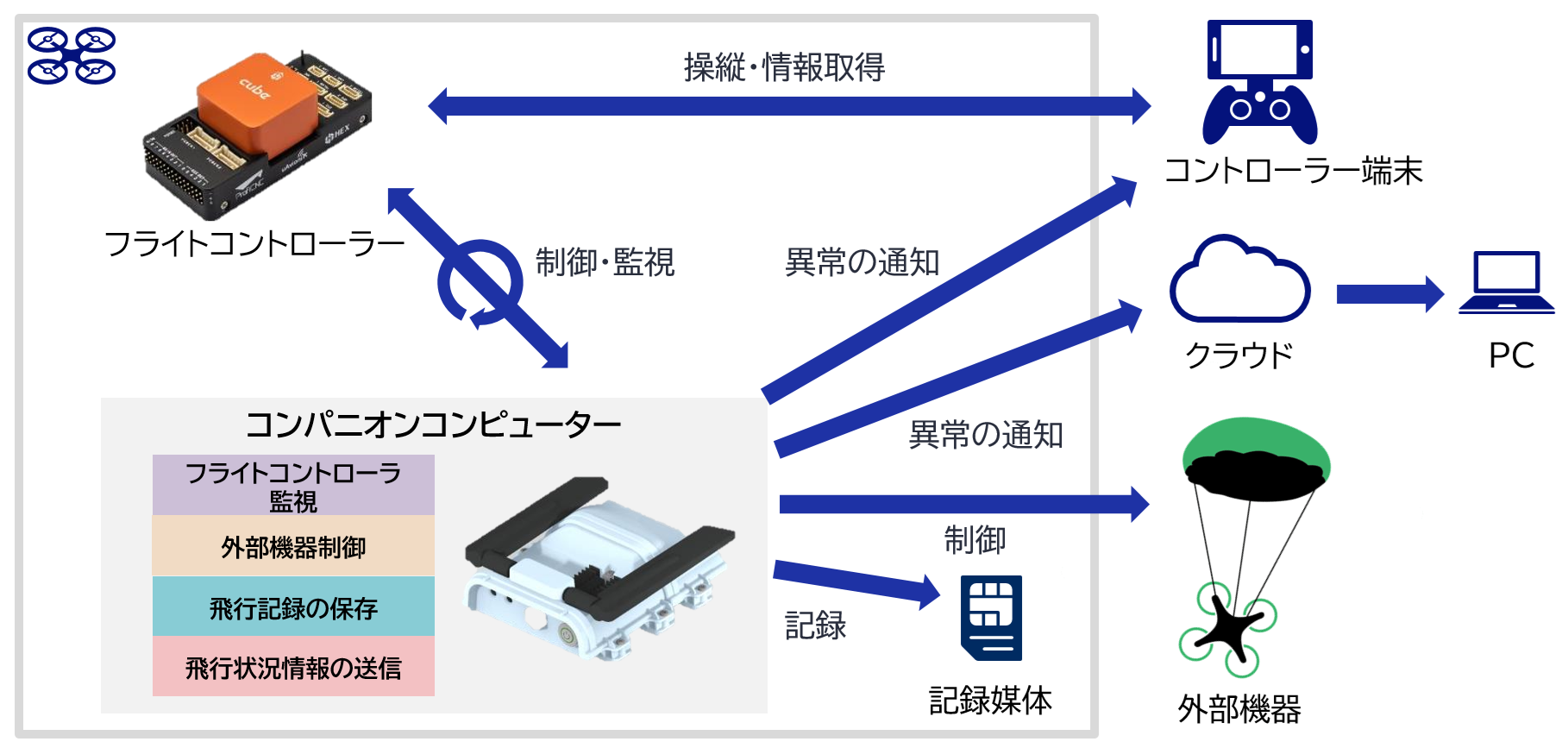
ドローンにITによる安全性を付与する場合,ドローンが内蔵するフライトコントローラー単独では処理能力が不足しがちである.このため,アドオンのコンパニオンコンピューター(図9)を追加し,安全機能を強化するのが一般的な手法となる.一定規模以上の産業用ドローンにおいては,フライトコントローラーとコンパニオンコンピューターが相互通信を行うことで,より詳細な情報共有とデータ処理が可能になる仕組みを備えていることが多い.

3.2 ITで実現するドローンの安全性
ここからは,実際に取り組んでいる事例を紹介しつつ,ドローンの安全性をITで高めるための内容に触れる.
3.2.1 障害検知
コンパニオンコンピューターからドローンの各種状態をリアルタイムに計測(図10)し,各機能に異常がないか判断する.バッテリー低電圧のような基本的な状態はコンパニオンコンピューターを用いなくても検知可能であるが,モーターの回転数を制御するESC(Electric Speed Controller)に数値のばらつきがないか,フライトコントローラーに記録されたエラーの有無,各種機器の温度異常など,フライトコントローラー単体では検知できない異常や,フライトコントローラー自体の障害を検出するためにコンパニオンコンピューターでの障害検知は有用である.この仕組みは,サーバー機器に搭載されている自己監視機能や,ハードディスクのS.M.A.R.T(Self-Monitoring, Analysis and Reporting Technology)をイメージすると理解しやすい.
3.2.2 通信冗長性
フライトコントローラーから地上のコントローラーへの通信は,ドローンであれば標準的な機能として備わっている.しかし,LTEなどの技術を活用し通信を冗長化する場合,コンパニオンコンピューターを採用することで,より柔軟なシステム構築が可能となる.コンパニオンコンピューターは汎用的なコンピューターと同等の機能を持つため,LTEの利用をはじめ,920MHz帯の通信モジュールの追加や,将来的にはStarlinkを利用した衛星通信の併用など,多様な構成を柔軟に実現できる.本稿では実際に,コンパニオンコンピューターにLTEと920MHz通信モジュールを搭載し,通信の3重化を実現した(図11).
3.2.3 拡張バーチャルフェンス
バーチャルフェンスの機能そのものはドローン自体に備わっているものであり,誤操作による飛行可能領域からの逸脱を防止する目的であれば,従来のバーチャルフェンス機能のみで事足りる.しかし以下のケースではその機能のみでは不十分な場合がある.
- 強風などにより,ドローンが強制的にバーチャルフェンス領域を超えてしまった場合
- 機体のGNSS故障により,正確な自己位置推定が不可能になった場合
コンパニオンコンピューターを採用している場合,コンパニオンコンピューター側でも位置測位が可能となるため,禁止されている領域への侵入を検知した際に,強制的に墜落という手段で飛行を中止させる方がより安全な対処となる.特に,空港や大使館など,ドローンの侵入が重大な問題を引き起こす可能性がある区域においては,コンパニオンコンピューターを活用した拡張バーチャルフェンス機能や強制墜落メカニズムを導入しておくことが,安全対策上有効な選択といえる.
3.2.4 パラシュート
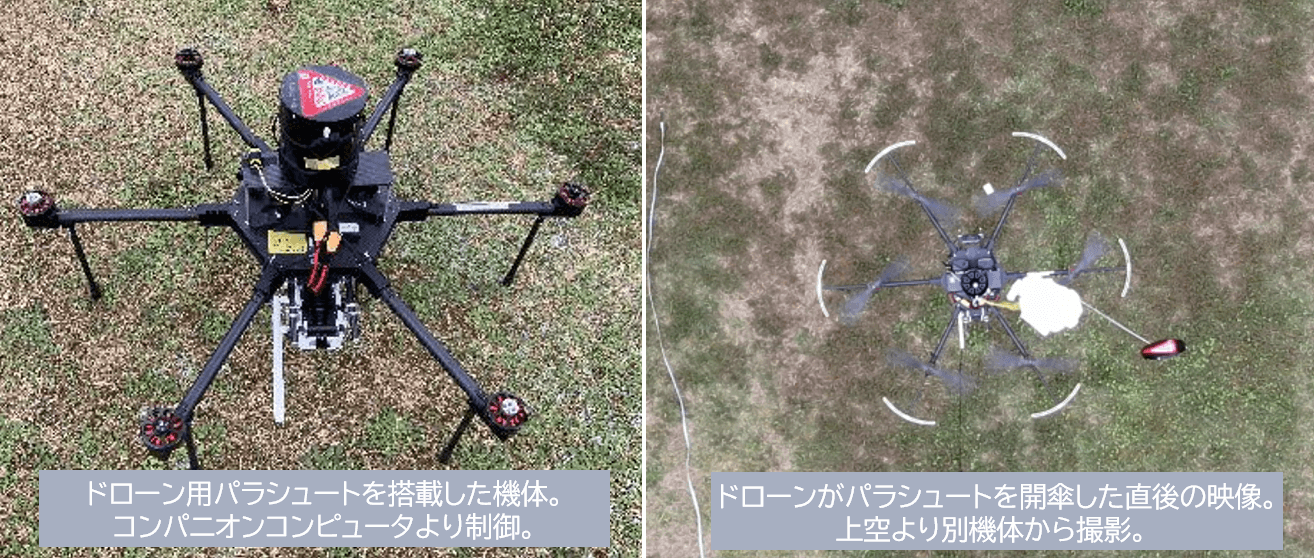
飛行継続が困難な障害や異常が発生した場合,地上への被害を最小限に抑えるためにパラシュートを備えるドローンが登場してきている(図12).単体のパラシュートシステムでも,急激な加速度変化を感知して自動開傘する機能はあるが,より高度な制御を実現するには,コンパニオンコンピューターを介してパラシュートの開傘を制御することが望ましい.特に,致命的な障害の検知や,拡張バーチャルフェンスによって飛行領域の制限超えを検知した場合など,飛行を継続することでより危険性が増す状況では,コンパニオンコンピューターからモーターを停止させ,パラシュートを開傘させ,不時着させるのが望ましい.
3.2.5 遺失防止
ドローンの事故には,直接的な衝突被害のほかにも,ドローン自体を遺失してしまうケースが頻繁に見られる.具体的には,通信が途絶えて飛行地点の特定が困難になったり,山中への墜落により捜索が難航したりするケースである.こうした事態に対応するため,コンパニオンコンピューターに救難用のビーコン信号出力機能を搭載する方法がある.ドローン墜落時には,墜落したドローンとは別の捜索に特化したドローンを利用して,墜落機のビーコン電波を受信し,機体の位置を特定する仕組みである(図13).
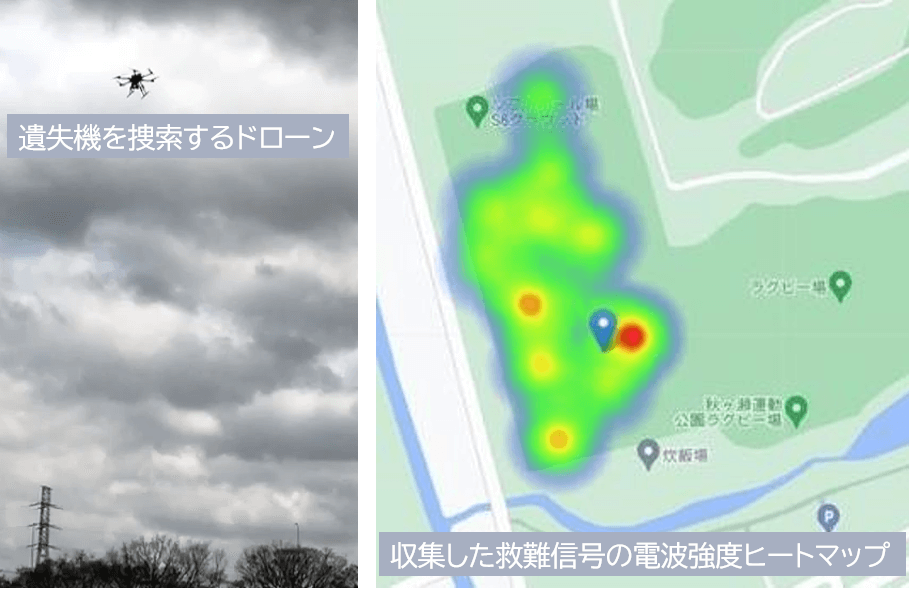
ビーコン信号は,ドローンの操縦や映像伝送には使用しないため,帯域幅は狭くとも,長時間の連続運用と遠距離通信が可能な仕様が求められる.
3.2.6 人物検知
ドローン運用において人的被害の防止は最も優先すべき課題である.これを達成するためには,ドローンが飛行するルート付近で地上の人間を検知・監視し,可能な限り人間の近傍を飛行することを回避する仕組みが必要である.ドローンにはカメラが搭載されていることが一般的だが,フライトコントローラー単体で,映像から人物の存在を判断するのはコンピュータリソース的に困難である.このため,ドローンのカメラから取得した映像をコンパニオンコンピューターで並列処理し,画像解析技術を活用して人物の有無を判定する(図14).

人物が検出された場合,システムは以下の対応を実行する:
- 飛行を一時中断(ホバリング状態を維持)
- 人を回避する動的な航路の自動切り替え
このような柔軟な判断と対応は,コンパニオンコンピューターの高度な処理能力を活かしたインテリジェントな安全対策といえる.
3.2.7 運用管理の多重化
ドローンの操作は一般的にコントローラーで行われるが,産業用の機体においては,コントローラーとは別に運用管理用端末から映像や状態を監視するケースが多く見られる.これはコントローラー以外の操作端末を確保することで,安全性向上を図ることにも結びついている.ドローン自身の安全性向上策として,コントローラーの多重化が可能であることは前述したが,同様に運用管理端末の多重化も実施できる(図15).具体的には,通信冗長化と異なる通信方式の端末を組み合わせる方法が有用である.たとえば,920MHz帯の通信端末とLTE回線を介した操作端末を複数台用意することで,地上側設備の冗長化を実現できる.これにより,操作端末の不具合(PCの異常など)にも対処可能な環境を構築できる.
3.2.8 追尾ドローン
大型ドローンを物資運搬や点検作業で使用する場合,衝突などのトラブルはより重大な被害につながる可能性が高い.そのため,安全性を高めるために,操縦者がドローンを俯瞰的に視認しつつ操縦できる仕組みが有用である.この目的のために,大型ドローンに小型監視ドローンを伴走させ,小型監視ドローンの映像を地上からモニタリングする方法がある.この方法により,操縦者は大型ドローンの周囲を確認しつつ遠隔操作を行える.実践では小型監視ドローンは自律的に大型ドローンを追尾するシステムを実装した(図16).このため,操縦者は小型ドローンの操縦に気を取られることなく,大型ドローンの映像に集中し,安全な操縦に専念することが可能となる.

4.安全性を重視したドローンの実証実験
本章では2024年度,広島県神石郡神石高原町(図17)で行った物流ドローンの実証実験における安全対策について述べる.

4.1 実証実験の背景
近年,物流の2024年問題と呼ばれる物流人材の不足は,中山間地域の地方自治体にとって深刻な問題となっている.物流業者は大規模な輸送が可能な都市間配送にコストメリットを求めるため,面積に対して人口が少ない中山間地域への物流継続は難しさを増している.こうした状況の中,起伏や路面状況の影響を受けず,自律的に空中を移動できるドローン物流への期待が高まっていた.
ただし,中山間地域では人口密度が低いためドローンの飛行に理解を得やすい反面,山間部は携帯電波の不感地帯が広がっており,継続した通信の確保が難しいという課題があった.また離陸地点と目的地は直線的に結ぶことが輸送の観点では効率的であるが,民家や畑を横切ってしまうケースもあり,そういった場面で人的被害の発生をいかに防ぐか,という安全対策上の課題もあった.
4.2 ITによるドローンの安全性の実現
前述の課題を解決するため,物流ドローンにコンパニオンコンピューターを搭載し,かつ,以下の機能を実装した.
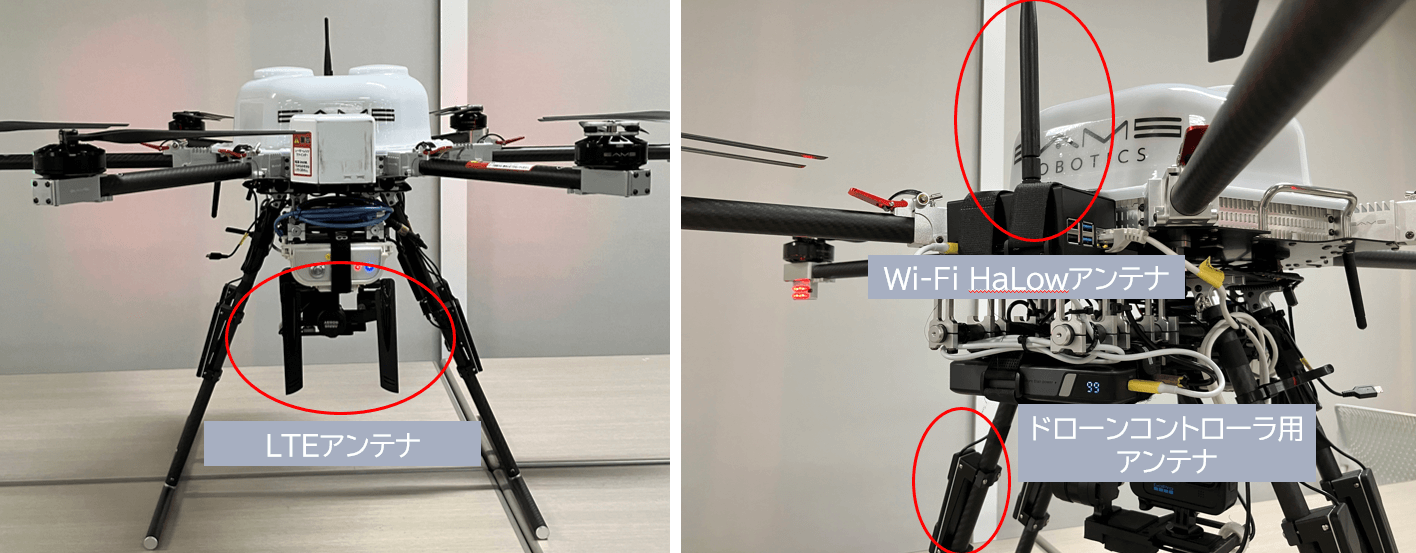
- LTEと合わせて,長距離通信可能なWi-Fi HaLowの通信機をコンパニオンコンピューターに実装し,LTE不感地帯でも継続的にドローンと通信できる仕組みを実装
- コンパニオンコンピューターに人物検知可能なAIを搭載し,人物を検知した場合,飛行ルート上で一時停止し,地上側にアラートを通知する機能
- 複数端末で運用監視が行えるよう,通信経路毎に運用端末を分離し,いずれの端末からでもドローンの監視,ドローンへの指示が可能な環境の構築
4.3 実証実験の様子
実証実験における飛行ルートは途中にLTE不感地帯の横たわるゴルフ場を横断する形で設定した(図18).
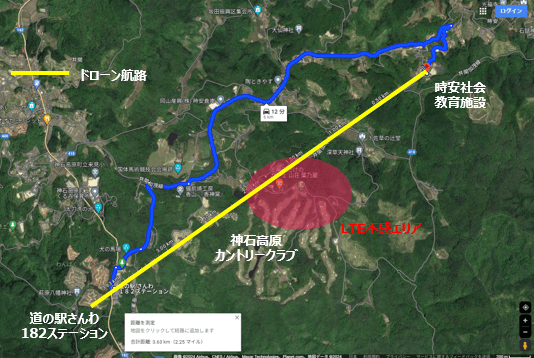
関係者への実証実験の内容説明後,以下の手順で実施した.
- ゴルフ場を横断する自動飛行ルートを設定し,飛行ルート上に人物を配置.
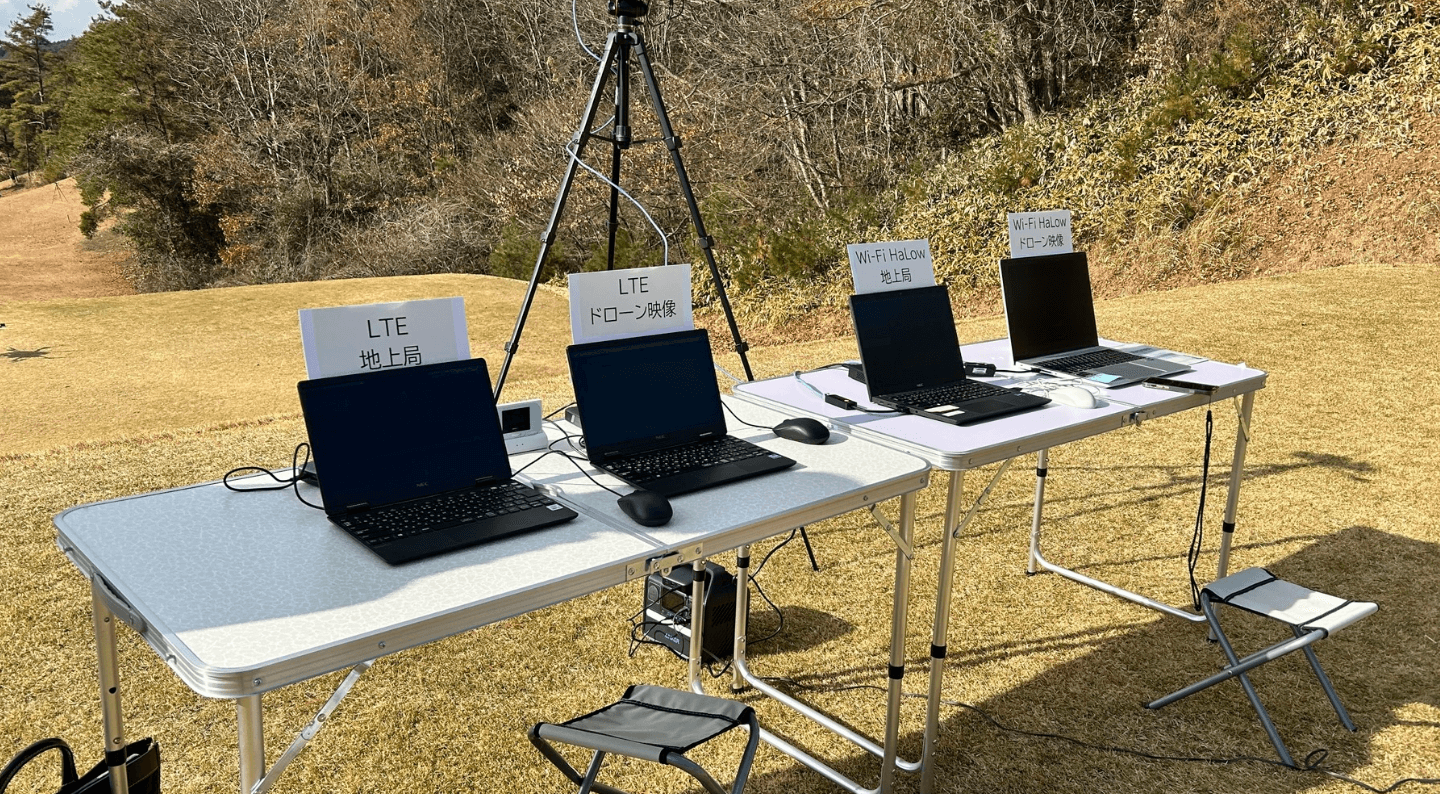
- 自動飛行を開始し,ドローンが備えたカメラで人物を認識したとき(図19),ドローンに搭載した人物検知通報がWi-Fi HaLow通信経由で地上側の運用管理PCに通知される(図20).
- ドローンは人物検知と同時に自動で空中静止(ホバリング)し,地上側からの次アクションの指示を待つ(図21).
- ホバリング状態を確認したら,Wi-Fi HaLow通信経由で地上側の運用管理PCからドローンに離陸地点への帰還を指示する.
- ドローンが離陸地点に帰還する(図22).




4.4 本実証における課題
本実験ではすべての安全機能は作動し,ITによるドローンの安全性向上の有用性は証明することができた.一方で実運用を行うためには依然解決すべき課題も残っていることが浮き彫りとなった.
- コンパニオンコンピューターや冗長化された通信システムなどが,本来のドローンのペイロードや継続飛行距離を損なっており,可搬重量が小さくなってしまった.
- 本実証ではWi-Fi HaLow基地局の電源はモバイル電源で補った.恒久的な運用のためにはWi-Fi HaLow基地局に常時電源供給可能な状態にする必要がある.
- Wi-Fi HaLowの電波はアンテナの向き等の条件によって通信可能距離の変動が大きく,同距離でも機体の高度や向きによっては通信が途絶えてしまうケースがあった.
- 人物検知距離が30m程度で限界となる.より高解像度の映像で分析すれば検知距離を延ばすことは可能だが,処理時間と必要なコンピュータリソースが増大するため,リアルタイム性,バッテリー持続時間などの別の課題が生じてしまう.
5.今後の展望
ドローンの飛行性能は,今後も進化を続けていくと期待されている.特にバッテリー性能の向上,コンパニオンコンピューターの小型化・低消費電力化が進むと見込まれる.こうした技術の進展に伴い,ITを活用したドローンの安全性向上対策もさらに高度化していくと予想される.
また,本稿では詳しく述べなかったが,ドローンのセキュリティ対策にもIT技術の活用が不可欠となる.たとえば,操縦者の認証や情報抜き取りへの対策など,ITで解決すべき課題は依然として多い.この流れは,自動車の安全装備や自動運転技術のIT活用との類似点も大きい.
しかし,コンパニオンコンピューターの役割が拡大していく一方で,制度的な課題も浮き彫りになっている.現在,ドローンの社会実装促進のために,機体認証制度が導入されている.国が承認した認証機体は,一部の申請を省略して飛行できるという制度である.だが,登録後にIT機能による安全性向上のための改造を行った場合,本機体は認証の対象外となる(改造機体として飛行申請は可能だが,申請の簡略性が失われる).
この問題は,制度の成熟度とともに解決されるべき課題といえるだろう.
参考文献
- 1)春原久徳,青山祐介,インプレス総合研究所:ドローンビジネス調査報告書2024,(株)インプレス(2024).
- 2)青山祐介,インプレス総合研究所,ドローンジャーナル編集部(監修):ドローンビジネス調査報告書2025【インフラ・設備点検編】,(株)インプレス(2024).
- 3)澤田雅之:ドローン技術の最新事情 ペーパーバック(2025).
- 4)国土交通省:平成31年度 無人航空機に係る事故トラブル等の一覧,https://www.mlit.go.jp/common/001292055.pdf
- 5)国土交通省:令和2年度 無人航空機に係る事故トラブル等の一覧,https://www.mlit.go.jp/common/001489732.pdf
- 6)国土交通省:令和3年度 無人航空機に係る事故トラブル等の一覧,https://www.mlit.go.jp/common/001408112.pdf
- 7)国土交通省:無人航空機の事故等の報告及び負傷者救護義務,https://www.mlit.go.jp/koku/accident_report.html
- 8)国土交通省:無人航空機(ドローン・ラジコン機等)の飛行ルール,https://www.mlit.go.jp/koku/koku_tk10_000003.html

下問勝司
k-shimodoi@nec.com
NECソリューションイノベータ(株)にて高可用性システムおよびドローンソリューションの事業リーダー.(一社)セキュアドローン協議会理事(2022~2025).理学修士.
採録決定:2025年10月17日
編集担当:草場 力((株)日立製作所)