非接触型ごみ収集システムにおける自律走行型ロボットの開発と社会実装に向けた検討
Development of an Autonomous Robot for a Contactless Waste Collection System and Study for its Social Implementation
1. はじめに
新型コロナウイルス感染症の拡大により,ごみ収集作業員の感染リスクが社会的な課題となっている.また,2020年に閣議決定されたスーパーシティ構想[1]において,自動ごみ収集が構成要素の1つとして挙げられており,ごみ収集に関するイノベーションが必要とされている.さらに,2020年に環境省が公開した「選択と集中」[2]の「1.選択と集中の重点の視点:社会変革の加速化に向けたリデザイン」の章内で「ごみ収集の自動化による非接触型ごみ処理体制を構築」が挙げられている.近年のわが国は持続可能な一般廃棄物処理システムの構築に向けた取り組みだけでなく,感染症対策に関する課題もあり,自動ごみ収集を含めた非接触型ごみ収集システムに関する社会的ニーズが急激に高まっている.
また,埼玉県久喜市の南栗橋駅前街区では産官学連携による次世代のまちづくりを推進するプロジェクトとして「BRIDGE LIFE Platform構想」が策定され,非接触型ごみ収集を含めた次世代型モビリティの導入を念頭に置いた街づくりが進展している[3].2022年5月28日に本街区にて非接触型ごみ収集が導入されたときに期待する項目に関するアンケート調査を行った結果,地域住民の回答を24件得ることができた.このアンケート結果では,「曜日と時間の指定がないこと」という項目に対して「期待が大いにある」が21件,「少し期待している」が3件,「ごみ捨て場までの距離が短くなること」という項目に対して「期待が大いにある」が20件,「少し期待している」が1件となっていることが確認できた[4].この結果から,曜日と時間指定がなく,自由にごみを捨ててよくなることやごみを捨てるまでの距離が短くなることが,地域住民においての非接触型ごみ収集システムに求められている役割であるといえる.
欧米や中国ではアーム式の反転装置がごみ収集車に取り付けられている例やごみ収集ロボットの導入に向けた検討が進んでおり,ごみ収集作業員の非接触化が図られている事例も存在するが[5], [6],わが国においては路地が狭いことや車両規格の観点からそのまま導入することが難しいという課題がある[7].また,既にわが国でも屋外の公共空間を自律走行するモビリティ・ロボットに関する研究は盛んに行われているが[8], [9],物流等の動脈産業に活用される例が多く,ごみ収集分野に活用した例は少ない.
こうした背景から筆者らは環境省の環境研究総合推進費[10]を活用し,「非接触型ごみ収集システムの開発と社会実装に向けたシナリオ構築」に関する研究を行っている.本研究は,非接触型のごみ収集を実現する要素技術の開発とシステム化およびわが国における社会実装に向けたシナリオ構築を行うことを目的としている.具体的な要素技術として,既存のごみ収集システムとの連携を念頭においた非接触型のごみ投入システム[11],ごみの搬送の非接触化・自動化を実現するスマートごみ箱および自律走行型のモビリティ・ロボットの開発を進めている.これらの要素技術は南栗橋駅前街区等の住宅団地やショッピングモール・テーマパークなどの特定空間において社会実装を進めることを目標としている.そして,上記の場所で活用する実験を行う過程で,社会実装するうえでの課題を整理し,わが国のごみ収集の実情に合わせた社会実装に向けたシナリオを提示することが最終的な目標となっている.
本稿では要素技術の1つとして開発した自律走行型のロボットの開発成果について述べる.また,実際に南栗橋駅前街区(以下,対象街区という)のイベントにおいて,本ロボットを活用し,非接触型ごみ収集を行うことができるか確認するために行った実験結果について示す.さらに,この実験結果について社会実装という観点から考察した内容を述べる.わが国のごみ収集分野において自律走行型のロボットを屋外の公共空間で活用し,非接触化・自動化を図った数少ない事例であり,人とロボットが共存し協調して働く持続可能な一般廃棄物処理システムを構築するうえで,参考になる内容であると考えている.今回の社会実装では新型コロナウイルス感染症の拡大によるごみ収集作業員の感染リスクを低減させるために,ごみ収集システムは非接触型である必要性があるだけでなく,人手が必要な作業を支援するために,人が作業しない時間帯で自律走行型ロボットを活用することが重要であるという知見を得ることができた.
2. 非接触型ごみ収集システムにおける自律走行型ロボットの開発
2.1 プロトタイプでの実験を基にした運用方法の策定
対象街区で非接触型ごみ収集を実現するうえで,ロボットに必要な機能を決め,運用方法を策定する必要がある.そこで,自律走行機能は有していないが,ごみ箱を非接触で運搬することができるロボットのプロトタイプ(以下,プロトタイプという)を開発し,実際に対象街区で走行させることで,運用方法の策定に必要な要素を整理した.
プロトタイプは78 Lの台車付きごみ箱の下に潜り込み,ロボットの前後に取り付けられた把持腕が90度回転する機構となっている.これにより両サイドからごみ箱を把持し,牽引することができる.また,リモコンによる遠隔操作が可能で,ロボットの走行に関する操作および把持腕の回転角度の調整を行うことができる[12].
対象街区のインターロッキング舗装の路面にごみ箱置き場(以下,ごみステーションと呼ぶ)を設置し,このプロトタイプでそこに置かれているごみ箱を運搬することができるか確認する走行実験および実運用を想定した考察を行った.その結果,ごみ箱に台車を取り付け,ロボットにその台車を牽引させる機構を設けることで,非接触でごみ収集できることを確認した.しかし,ごみ箱の下に潜り込む仕様の場合,高さ制約により付加機能が限定的となり,自律走行機能を設けることが難しくなることが分かった.そこで,牽引機構をロボットの後部に移し,高さ制約を解消することで,自律走行に必要なLiDAR等の機器を取り付けることができるようにした.また,対象街区ではロボットは住宅団地の管理事務所周辺で待機しており,ごみ収集が必要になった際に動作を開始するという運用が想定されると考えた.具体的には,ロボットの待機中にごみ収集の指示が出されると,ごみステーションまで移動し,台車付きごみ箱を牽引する.その後,目標地点まで運搬し,ごみ箱の中身をごみ収集作業員が回収後,空のごみ箱を元の地点に戻し,再度待機場所まで移動するという流れになる.この結果を基に,自律走行機能を有したロボットは自律走行による巡行機能・台車付きごみ箱への合体機能・ごみステーションへのごみ箱の挿入機能・目標地点での待機機能の計4つの機能を設けて運用することが適切であると判断した(図1).本稿では,ロボットが台車付きごみ箱を把持し,牽引できる状態にすることを合体機能,ごみステーションにごみ箱を移動させ,牽引を解除することを挿入機能と定義する.
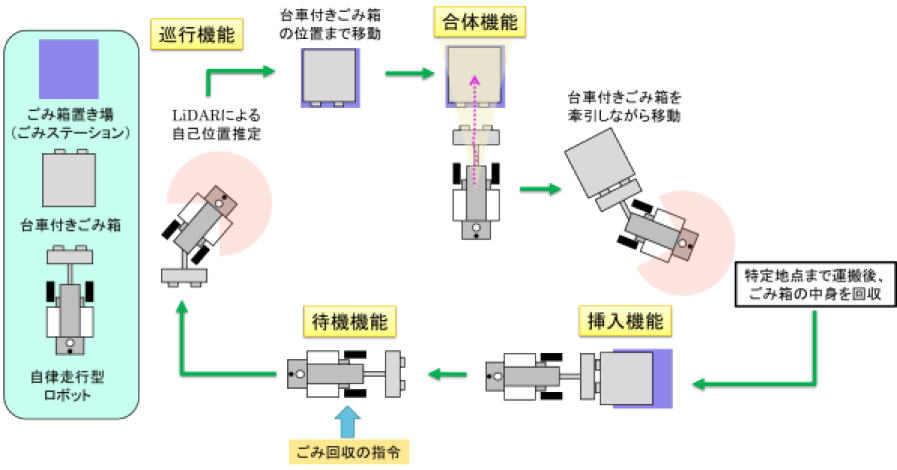
Fig. 1 Method of operating an autonomous robot in contactless waste collection.
2.2 ロボットに必要とされる要素
プロトタイプを用いた実験結果や対象街区の路面環境を踏まえ,非接触型ごみ収集を行ううえでロボットに必要とされる要素について整理した.本要素は,屋外公共空間での運用を見据えたものとなっている.下記にその要素を示す.
- ・台車付きごみ箱と自動で合体およびごみステーションにごみ箱を挿入できること.
- ・出発地点から到着地点まで台車を牽引し,人や車両等の障害物を避けながら自律走行できること.
- ・屋外の平坦なアスファルト舗装やインターロッキングブロック舗装の道を走行できること.
- ・歩道や路側帯での走行を見据え,道幅2 mの道を走行できる大きさにすること.
- ・道路交通法に基づき1.7 m/s(時速6 km)以下の速度で走行すること.
2.3 自律走行型のロボットの開発
上記の仕様を基に自律走行型のロボットを開発した.また,108 L以下のごみ箱を積載することができる台車とごみステーションのフレームも開発した.ロボットの大きさは幅650 mm,長さ1500 mm,高さ810 mmであり,ごみ箱を積載する台車は幅650 mm,長さ694 mm,高さ739 mm,ごみステーションは幅980 mm,長さ965 mm,高さ890 mmとなっている(図2).ロボットの牽引力は350 Nとなっており,傾斜2 deg以内の平坦な道であれば150 kg程度の重量物を牽引することができる.
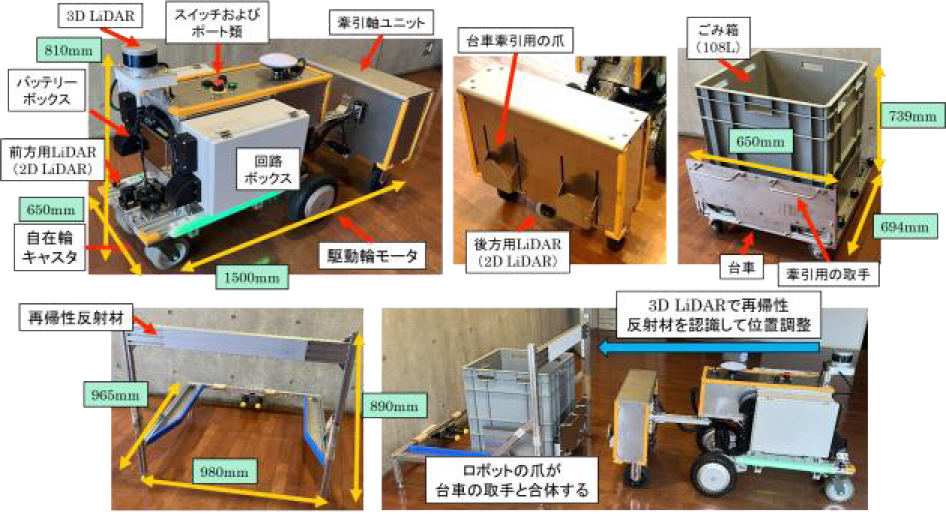
Fig. 2 Appearance of autonomous robot, waste bin with car and waste station.
(1) 本ロボットの仕様
ロボット前方の上部に3D LiDAR,下部に2D LiDARが取り付けられている.また,ロボット本体の後方車輪に駆動輪モータがあり,LiDARによる情報を基に,後輪を制御することで自律走行することができる.さらに,ロボットの後方は台車の牽引機構があり,爪が上下することで台車についている取手の把持または切り離しを行うことができる.この機構により,ごみステーションに設置された台車付きごみ箱とロボットの合体,またはごみステーションへのごみ箱の挿入ができるようになる.牽引機構は可動角度範囲が±95 degで特定の角度になった際に電磁ブレーキで向きを固定することができるため,台車の正確な位置調整を行うことが可能となっている.また,牽引機構の下部にも後方用2D LiDARが取り付けられており,後方の障害物を検知できるようにしている.巡行する場合は,前方の2D LiDARで周辺情報を取得し,障害物を避けながら自律走行を行う.通常の移動速度は0.5 m/sと設定している.ごみ箱との合体やごみステーションへのごみ箱の挿入を行う場合は,ごみステーションの上部に再帰性反射材を貼り,3D LiDARがその反射強度を測定することで,合体・挿入動作を行うことができる位置まで正確に移動する仕組みである.現状,自律走行は2D LiDARの情報を基に行っているが,坂道の自律走行が難しいため,今後3D LiDARベースの自律走行ができるように改良する予定である.
(2) 自律走行を行うための制御
本ロボットの自律走行のシステム構成は図3のようになっている.2D LiDARで周辺地図を作成し,自律走行を行う際はその地図を基に自己位置推定および経路計画を作成する仕組みとなっている.地図作成後に,目標地点,走行禁止エリア,0.1 m/sで走行する低速移動エリア,0.7 m/sで走行する高速移動エリア等を設定することができ,各運用場所に合わせるためのカスタマイズ性を設けている.ロボットはtxtファイル形式で移動・停止・合体・挿入等のコマンドをシナリオファイルに記述することで定型動作が実行され,制御することができる.
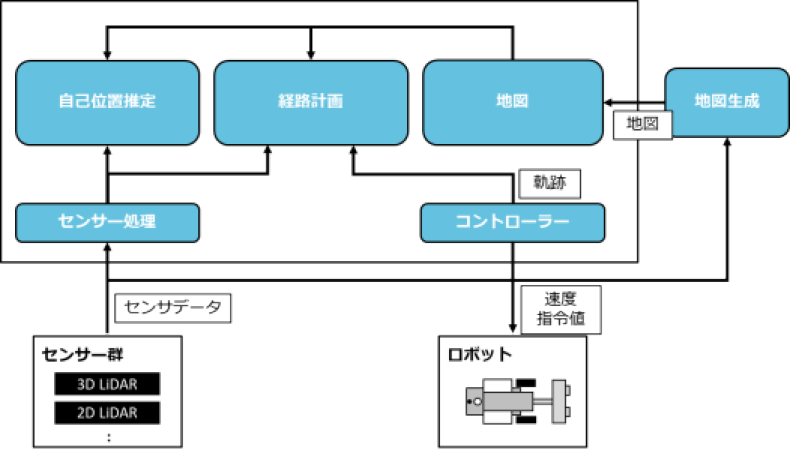
Fig. 3 System configuration for autonomous driving.
(3) 合体・挿入を行うための制御
合体・挿入を行う場合はごみステーションに貼付された再帰性反射材の中心点を捉えることで正確な位置を認識し,ロボットの制御を行う(図4).正確な位置まで移動した後はごみステーションに向かって後進させ,爪を上昇または下降させる制御を行っている.その際の制御フローを図5に示す.数値条件は運用場所によって調整する必要があるため,ロボットの操作担当者が変数として調整できるようにしている.現状,合体・挿入動作にかかる時間が100秒以内になることを目標として設定し,数値条件の調整を進めている.
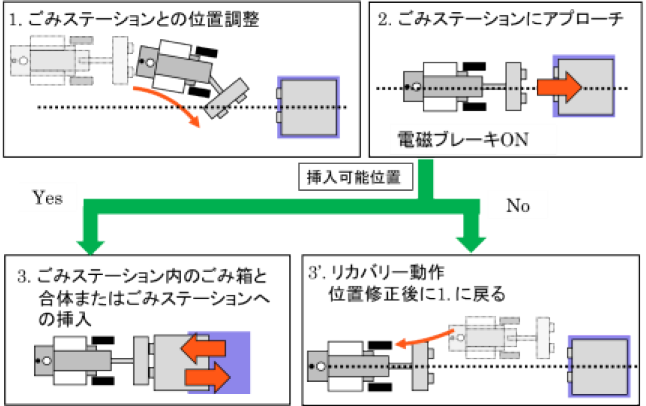
Fig. 4 Robot motion for docking and insertion.
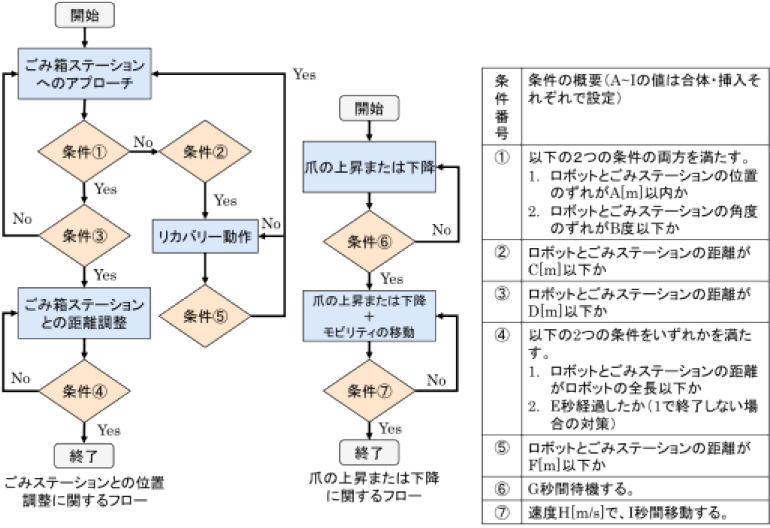
Fig. 5 The control flow for docking and insertion.
(4) 開発環境での機能検証
2023年5月2日と17日に早稲田大学本庄キャンパスの敷地内の傾斜1 deg以内の平坦なアスファルト舗装面で,上記に示した制御が適切に機能し,2.2節に示した要素を実行することができるか検証した.検証するうえで設定した図5の条件の数値を表1に示す.具体的には,5.0 m×15 mの空間の端にごみステーションを1台設置し,2D LiDARによる地図作成を行った後,ごみ箱の回収指令を出し,ランダムに設定したスタート地点から自律でごみ箱を回収後,目標地点まで移動できるかという動作検証を行った.さらに,ごみステーションにごみ箱を戻した後,指定した地点まで移動できるかについても検証した.また,走行ルート上に障害物として三角コーンを設置し,避けながら目標地点に移動することができるかについても検証した.その結果,通常時の速度である0.5 m/sで走行した場合,障害物に衝突することなく一連の動作を行うことができた.ごみ箱を載せた台車との合体機能・ごみステーションへの挿入機能についてはごみステーション周辺で切り返しが必要になるため,ごみステーションの前方に一定の空間が必要であることが分かり,具体的には,3.0 m×3.0 m程度の空間を設けることができれば,合体・挿入機能を正常に行うことができることを確認した.また,幅2 mの屋内のフローリングの路面でも地図を作成し,自律走行することができるか検証し,壁にぶつかることなく走行できることを確認した.この結果から,2.2節に示す要素を満たすロボットの機能を確認することができた.
Table 1 Setting conditions for docking and insertion.

3. 南栗橋駅前の戸建住宅街区でのイベントにおける本ロボットの実験
2023年6月10日に対象街区の戸建住宅街区で街びらきから1周年が経過したことを記念し,「街びらき1周年記念感謝祭」が開催された.本イベントは住宅団地内の公道部分をイベント会場として貸し切る形式で行われた.さらに,キッチンカーが4台出店し,地域住民が飲食できるエリアが設置され,実際にごみ箱にごみが捨てられる環境であった.そこで,2章で示したロボットを用いて対象街区の環境下で非接触型ごみ収集を行うことができるか確認し,現状のロボットの課題を整理するとともに社会実装を見据えた課題を把握することを目的に,本イベントで本ロボットを活用した実験を行った.
実験計画を策定するうえで,ごみ箱を載せた台車の設置数が不足するとごみが溢れてしまう点や,過剰に設置することによる作業負荷の増加を避けるために,ごみ箱の設置数を適当なものに設定する必要があった.そこで,ごみ発生量の推測を2022年5月28日に対象街区で行われた同規模のイベントのごみ発生量のデータから行い,予測結果を基にごみ箱の設置数を設定し,具体的な実験計画を策定した.
3.1 ごみ発生量の推測を基にしたごみ箱設置数の設定
2022年5月28日に行われたイベントはキッチンカーが出店し,イベント参加者が可燃ごみをイベント会場内のごみ箱に捨てる環境であった.そこで,午前11時から午後2時の3時間,午後2時から5時の3時間で発生した可燃ごみ量をそれぞれ100 Lのごみ袋の容量換算で計測した.その結果,午前11時から午後2時の3時間で2.0袋,午後2時から5時の3時間で1.4袋発生したことが分かった.2023年6月10日のイベントも上記に示した結果と同量のごみが発生すると仮定し,ごみ箱の設置数を決めた.そのため,午前11時から午後2時,午後2時から5時の2つの時間帯に分け,各時間帯で1回ずつの計2回ごみ箱の中身を回収するとした場合,100 Lのごみ袋を取り付けたごみ箱は最低でも2つ必要になると推測した.そこで,本イベントでは100 Lのごみ袋を設置することができる台車付きごみ箱を2台設置することにした.
3.2 実験計画の策定
図6の上段に実験を行った場所の地図を示す.キッチンカーの前にイートインコーナーがあり,その周辺であるB地点とC地点に台車を1台ずつ設置した.A地点がロボットのスタート地点(待機場所)となっており,D地点にごみ袋をまとめて置いておくごみ集積所を設置した.AからB地点の距離は12 m,BからC地点は37 m,CからD地点は68 mであった.ロボットが走行できる道幅は,A地点からキッチンカーがある場所までは3.5 mであり,キッチンカーがあるエリアは2.0 mとなっていた.路面状況については,A地点からC地点の道路面は扇状の凹凸の模様が施されたインターロッキング舗装,C地点からD地点の道路面はアスファルト舗装であり,どちらも傾斜は2 deg未満の平坦な道である.また,本ロボットが走行する実際の実験場所を2D LiDARで読み込ませた地図データを図6の下段に示す.
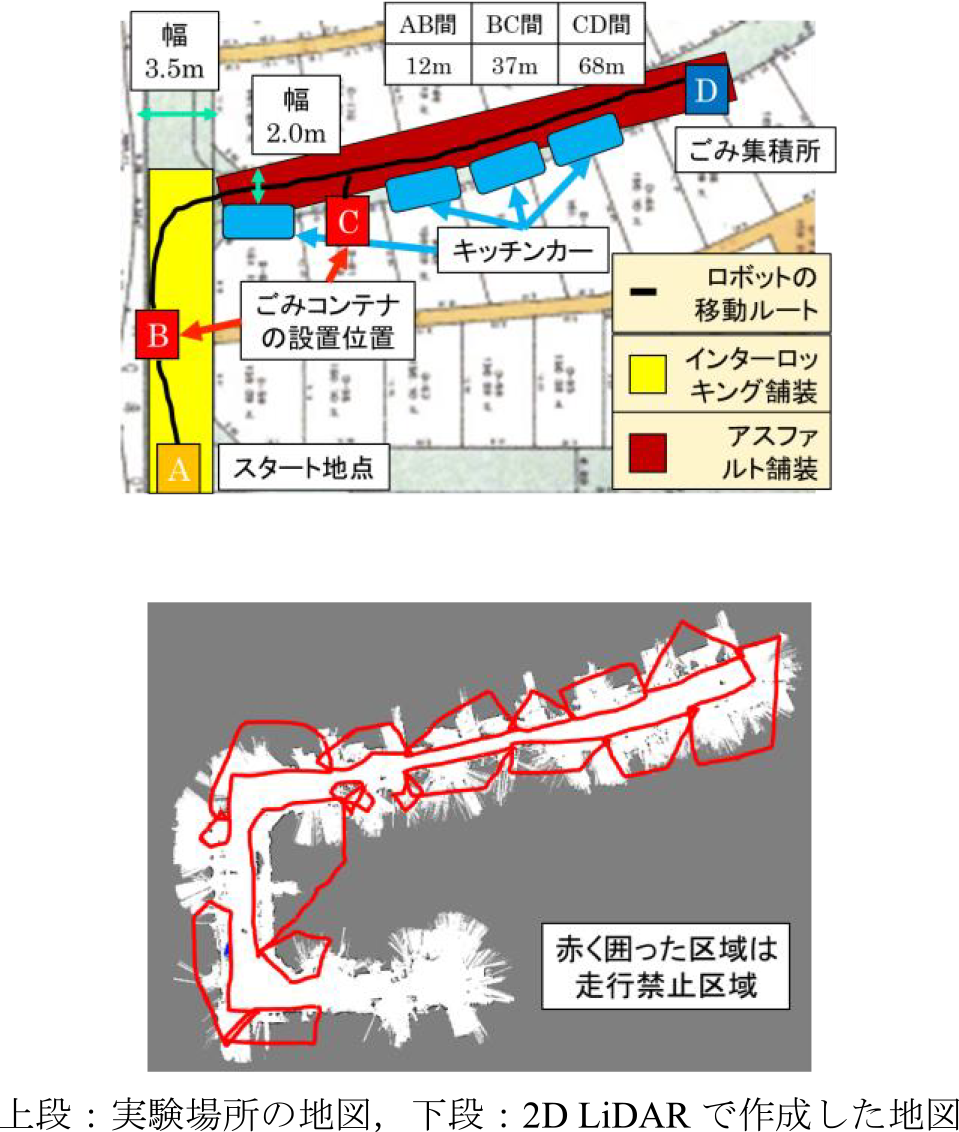
Fig. 6 Map of the experiment location and map created by 2D LiDAR.
B地点・C地点のごみ箱が満載になったタイミングでごみ回収の指示を出し,ロボットがA地点を出発する.B地点に到着後,台車付きごみ箱と合体し,D地点まで運搬する.ごみ袋のみをD地点で担当者が回収後,新しいごみ袋を取り付ける.新しいごみ袋が取り付けられた後,B地点に戻り,ごみ箱を挿入する.その後,C地点に移動し,B地点と同様の動作を行い,最終的にA地点まで戻ってくるという動作を行うことで,本イベントで発生したごみの収集を行った.本エリアのロボットの移動速度は0.5 m/sとしている.本実験を行う際に使用した図5内の条件の数値設定は表1と同様である.
ごみ箱が満載になるタイミングを把握するためには,ごみ箱上部にToF測距センサを取り付け,ごみまでの距離を測定し,LTE回線で測定結果を送信することができる装置を活用した(図7).この装置を活用し,ごみ箱が満載になる距離である60 mmを測定した際にロボットがごみ収集に向かう指令を出した.
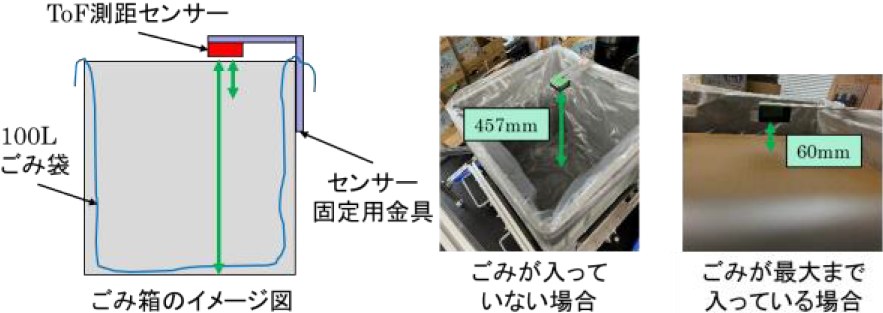
Fig. 7 Measuring the amount of waste using ToF sensors.
上記に示す環境下で実験を行い,下記に示す項目についてデータを取得した.
- ・イベントで発生したごみ量と時間帯の関係
- ・ごみ箱が満載になる時刻までのごみを捨てた人数
- ・本イベントにおけるごみの収集・運搬の非接触性
- ・ロボットの各動作の作業時間
また,現状のロボットの課題についても整理し,社会実装を見据えた考察を行った.
3.3 実験結果
実験の様子を図8に示す.

Fig. 8 The situation at the experiment site.
(1) イベントで発生したごみ量と時間帯の関係
各時間帯のイベントで発生したごみ量を測定した結果と回収したタイミングを図9に示す.ごみ箱が満載になったタイミングである午後2時と午後4時の計2回,ロボットを活用し,ごみを回収する動作を行った.また,本イベントで発生したごみ量は100 Lのごみ袋換算で午前11時から午後2時の3時間で2.0袋発生し,午後2時から4時の2時間で1.8袋発生したため,袋数としては各時間帯で2袋ずつごみ袋を回収することとなった.午後4時以降はキッチンカーが閉店しており,ごみを捨てられることはなかった.
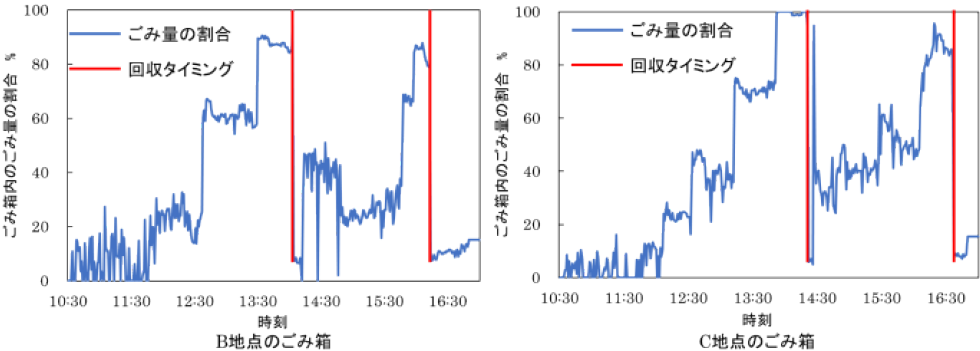
Fig. 9 Waste volume measurement results by time of day and the timing of collection.
(2) ごみ箱が満載になる時刻までのごみを捨てた人数
キッチンカーの商品を1人1つ購入したと仮定し,キッチンカー4台分の売上個数から本イベントでごみを捨てた人の人数を算出すると,午前11時から午後2時までで501人,午後2時から4時までで359人と推定された.
(3) 本イベントにおけるごみ収集・運搬の非接触性
A地点を出発し,2つのごみ箱をD地点まで運搬する一連の動作をごみに一度も触れることなく実施することができた.ごみ収集において,ごみに触れる必要がある動作は「ごみ箱からごみ袋を取り出し,特定の場所やごみ収集車が停車している場所まで運搬する」という動作を行う際に発生する.本実験では,上記に示す動作を本ロボットが代わりに行ったため,ごみ収集に関する作業は非接触で行うことができたといえる.
(4) ロボットの各動作の作業時間
1回目のごみ収集にかかった合計時間は30.9分,2回目のごみ収集にかかった合計時間は26.4分であった(図10).そのうち,運搬にかかる時間が1回目は22.3分,2回目は17.8分であり,それぞれ合計時間の72%と67%を占めている.合計移動距離と運搬にかかった合計時間から移動速度を算出すると,1回目は平均0.33 m/s,2回目は0.42 m/sで移動していることになり,0.5 m/sで移動する設定値より速度の低下がみられた.0.5 m/sは,設定値における最高速度のため,実環境では0.5 m/sよりも速度が低下するものであるが,1回目の運搬の際はB地点とC地点間での走行ルート上に歩行者がおり,それを避ける動作を2回行ったため,最短の移動距離ではなかったことも原因である.また,ごみ箱を載せた台車への合体機能・ごみステーションへの挿入機能について,B地点のインターロッキング舗装ではC地点のアスファルト舗装よりも合体にかかる時間が平均で100秒,挿入時間が96秒長くなることを確認した(図11).図5に示すリカバリー動作をアスファルト舗装では1回しか行わずに調整することができたが,インターロッキング舗装では8回程度行う必要があった.
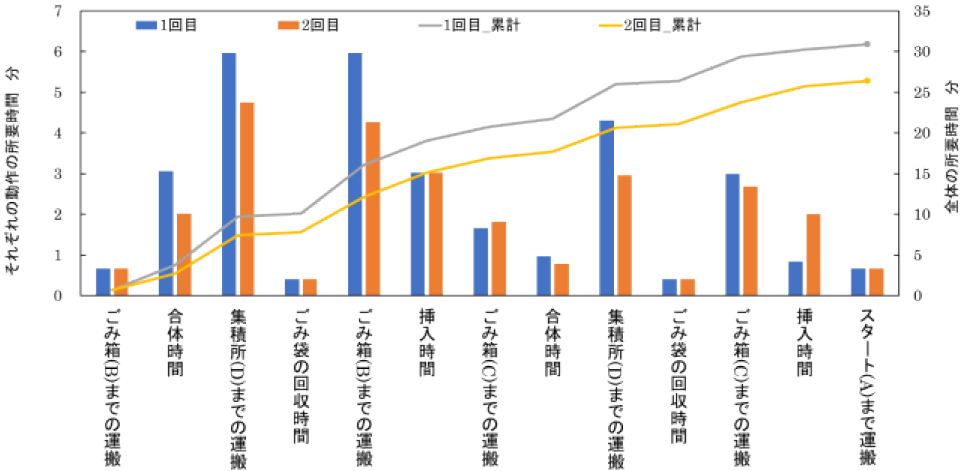
Fig. 10 Duration of each operation in this experiment.
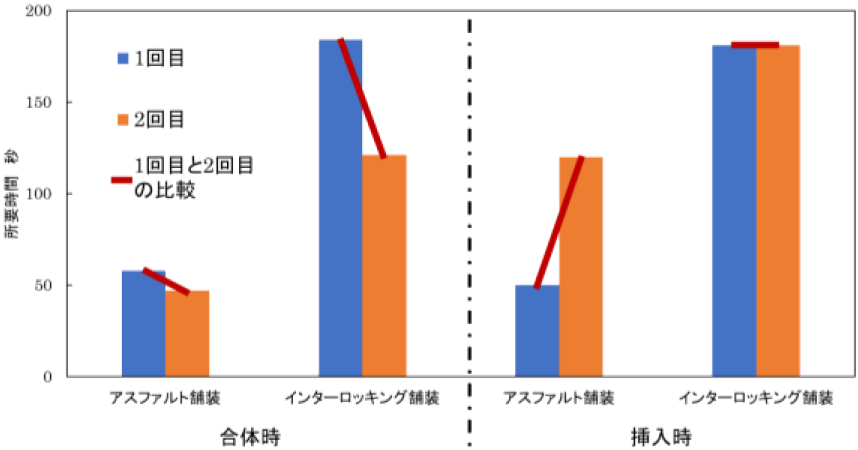
Fig. 11 Duration of robot docking and insertion operation.
(5) 現状のロボットの課題
合体・挿入動作にかかる時間が長いと歩行者や車両の通行の妨げになるため,合体・挿入動作については迅速に行う必要がある.現在は100秒以内で合体・挿入動作を行うことを目標にしているが,図11の結果から,インターロッキング舗装での合体・挿入動作は時間がかかっていることが確認できた.これはB地点のインターロッキング舗装に扇状の凹凸があることで,図5に示す制御フローにおけるリカバリー動作を行っても,車輪が地面と適切に接地できないため,表1に示す値を満たすことができず,リカバリー動作を何度も行ってしまうことが原因である.
この課題を解決するためには,本ロボットを活用する場所ごとにごみステーションの設置場所の変更やリカバリー動作に関する設定値の調整が必要である.具体的には,ごみステーションの設置位置をアスファルト舗装等の凹凸が少ない場所に配置することや,表1に示す条件①と条件②の設定値を大きくする対応が求められる.しかし,設定値を大きくすると,リカバリー動作を行う回数は減少させることができるが,位置調整の正確性も減少し,合体・挿入そのものが失敗する確率が上昇するためトレードオフとなる.したがって,ごみステーションの設置位置を調整することを優先するほうが良い.
今後の展望として,本ロボットが普及し,様々な環境下で活用されることを想定すると,様々な路面状況下で安定した合体・挿入ができる設定値を確認し,データを蓄積していくことが必要となる.
4. 実験結果に基づく社会実装に向けた考察
4.1 対象街区のごみ収集への本ロボットの応用
本実験結果から,本ロボットを活用することで人手による作業よりも非接触性が向上することが分かった.また,アスファルト舗装やインターロッキング舗装という多くの住宅団地で採用されている路面状況下で自律走行を行うことができ,対象街区以外の場所でも活用することができる可能性が高いことを意味する.
また,日々の生活において住宅団地におけるごみの収集作業は高頻度で行われる作業である.久喜市の可燃ごみ用の指定ごみ袋として多く利用されるのは45 Lのものであり,他の自治体のごみ重量の調査結果ではあるが,45 Lのごみ袋には平均3.9 kgのごみが捨てられているというデータがある[13].そのため,平均3.9 kgのごみ袋を目標地点まで運搬する作業がごみ集積所ごとに発生することが予想される.これにかかる作業負荷を本ロボットを活用することで削減することができるといえる.
本実験でロボットが行った動作を1人の成人男性が手作業で行う場合,A地点を出発し,B地点のごみ箱からごみ袋のみを取り出し,片手で持った状態でC地点に移動し,さらにC地点のごみ箱からごみ袋を取り出し,2つのごみ袋を両手に持った状態でD地点まで移動するという動作になる.本動作を実際に行い,時間を測定すると5.0分で作業を終えることができることを確認した.
ロボットの作業時間は1回目2回目でそれぞれ30.9分と26.4分であり,人手による作業よりもそれぞれ25.9分,21.4分長くなる結果となった.現在のロボットの設定速度である0.5 m/sの場合,2回分のごみの運搬にかかる時間の平均を取ると,20.0分となるが,道路交通法に定められた限界の速度である1.7 m/sで常に走行できると仮定した場合,移動速度は3.4倍となり,運搬にかかる時間は5.89分になることが見込める.しかし,運搬時間のみで5.89分かかり,ごみ箱との合体・挿入動作にかかる時間を含めるとより多くの時間がかかるため,ロボットの作業時間を5.0分以下にすることは難しく,人手によるごみ収集よりも作業時間を削減することは難しいといえる.
また,速度を上げると事故の危険性も高まるため,運用場所によって走行可能な速度のルール決めが必要である.しかし,本ロボットはどんな時間帯でも自動で走行することができるため,人が作業を行うことが少ない深夜や早朝の時間帯でも稼働できるという長所がある.また,これらの時間帯は人や車の往来も少なく,昼よりも安全に運用できる可能性が高い.この長所を生かすことで,人手が必要な作業をより容易にする運用を行うことができると考える.
たとえば,本イベントと同量の一般ごみが対象街区のごみ収集日に発生すると仮定すると,ごみ収集作業員は5.0分かけてごみ袋をごみ収集車まで運搬し,投入するという作業が必要になるが,夜間や早朝の間に本ロボットが1ヶ所にごみ袋をまとめて置くことができるため,これにかかる作業時間は削減することができる.回収するごみ袋数が増加するにつれて作業時間を削減することができる.人と本ロボットが共存し協調して働く社会を見据えるうえでは本ロボットと人の作業時間を単純比較するのではなく,人が作業しない時間帯を活用し,人手が必要な作業を支援するという目的で運用することが重要である.
しかし,社会実装を見据えると,下記に示す課題があることが分かった.
4.2 ロボットの走行するエリアの設定に関する課題
本実験を行った場所は本来公道となっており,自動車が走行する場所であったが,イベント期間中は閉鎖され,一般車は入れないように制限されていた.そのため,ロボットは公道のエリア全域を走行することができ,安全に活用させることができたが,本来本ロボットが公道の中心付近を走行するというのは非現実的である.社会実装を見据えると,運用場所ごとに,ロボットの走行可能なエリアについて規定を設けることが重要である.たとえば,グリーンフィールドであればロボットが走行できる路側帯を新たに設けることで,より安全に運用できる.ブラウンフィールドであればロボットの仕様や走行する時間帯等についての規定を設け,地域住民に周知させ,公道の端を走行するなどの対応を行い,車や歩行者の妨げにならないように運用する必要がある.対象街区の場合,公道の端に海老茶色に塗られたエリアがあり,ロボットが走行するエリアとして設定されている(図12).実運用の際はこの付近を走行させる計画で現在検討を進めている.

Fig. 12 The operational area of the robot in front of Minami-Kurihashi station.
4.3 ごみ量等のセンサ情報との連携
本実験は,ごみ箱にToF測距センサを取り付け,ごみ量が溜まったことを筆者らがPC画面上で確認した後にロボットに指示を出すことで行ったが,深夜や早朝等での運用を見据えると,現在の仕様では人が介入する必要があるため課題となる.この課題を解決するためにはごみ量を測定し,特定のごみ量になった際に信号をロボットに送信する技術との連携が必要である.
現状,物流業界では既にモバイルアプリからの注文依頼の信号を受け取り,目標地点までロボットが移動するという動作をすることができる事例は存在するが[14],ごみ収集に活用した事例はない.しかし,ごみ量を測定し,測定結果を担当者に送信する機能に関する研究は既に海外でも行われている.たとえば,Nirdeらの研究では,超音波センサやGSMモジュール等が取り付けられ,IoT技術を活用したスマートごみ箱の開発が行われており,ごみ量をSMSの形式で受け取ることができるようになっている[15].Maheshwariらの研究でも,ごみ箱に取り付けられた赤外線センサのデータをごみ収集車にメッセージとして送信する技術に関する開発が進んでいる[16].上記の事例もあるため,ごみ箱が満載になったことを検知したセンサの信号をロボットに送信し,ロボットのスイッチがONになるというデータ連携は技術的なハードルは低いといえる.このデータ連携を行うことで,ごみが満載になったタイミングで,自動で回収に向かうという動作が可能となり,深夜や早朝等での運用が容易になると考える.筆者らはセンサを活用し,ごみ量を測定することができるスマートごみ箱の開発を進めており[7],データ連携についても検討を進めている.
5. おわりに
本稿では,わが国のごみ収集の非接触化・自動化を図るために自律走行型のロボットを開発し,南栗橋駅前街区で本ロボットを活用する実験を行い,社会実装の観点から考察した内容を述べた.本ロボットを活用することで,非接触性の向上や作業負荷の軽減が見込めることが分かった.
また,屋外のアスファルト舗装やインターロッキング舗装等の路面で非接触型ごみ収集を行うことができたため,現状の仕様でも様々な場所で活用することができる可能性が高いといえる.しかし,非接触型ごみ収集の社会実装に向けては,凹凸のある路面下では運用が難しくなるという技術的課題や走行エリアを規定する必要があるという社会的課題等があることが分かった.ごみ収集分野において屋外公共空間に自律走行型のロボットを活用した事例は少なく,人とロボットが共存し協調して働く持続可能な一般廃棄物処理システムを構築するうえで,参考になる内容であると考えている.
謝辞 本研究は環境研究総合推進資源循環領域「非接触型ごみ収集システムの開発と社会実装に向けたシナリオ構築(JPMEERF20213G01)」の一環として実施している内容の一部を報告するものである.関係者の皆様にお礼申し上げる.
参考文献
- [1] 「スーパーシティ」構想とは:〈https://www.chisou.go.jp/tiiki/kokusentoc/supercity/openlabo/supercitycontents.html〉(参照2023-07-31).
- [2] 「選択と集中」実行本部第4回会合:〈https://www.env.go.jp/policy/focus_on_core_competencies/meeting_04.html〉(参照2023-07-31).
- [3] 南栗橋8丁目周辺地区の街づくり~BRIDGE LIFE Platform構想~: 〈https://www.city.kuki.lg.jp/smph/shisei/city_plan/minami-kurihashi_BLP.html〉(参照2023-07-31).
- [4] 壺内良太,菊池 亮,小川聡久,小野田弘士:非接触型ごみ収集システムの社会実装シナリオの構築に向けた検討,全国都市清掃研究・事例発表会講演論文集,Vol.44, No.57, pp.171–173 (2023)
- [5] SMART BIN: 〈https://www.aiincorporated.com/smart-bin〉(参照2023-07-31).
- [6] 西 襄二:世界の特装車研究 アメリカのごみ収集車 作業性と運用効率に注目,The truck, Vol.54, No.7, pp.38–42 (2018)
- [7] 小野田弘士:ごみ収集の非接触化・自動化に向けた展望,廃棄物資源循環学会誌,Vol.32, No.2, pp.155–162 (2021)
- [8] 井上一道,尾崎功一:つくばチャレンジにおける移動ロボットの設計方針の提案と考察,日本ロボット学会誌,Vol.30, No.3, pp.234–244 (2012)
- [9] 五十嵐広希,木村哲也,松野文俊:移動ロボットの屋外公共空間を用いた実証実験におけるリスクマネジメント手法–「つくばチャレンジ」における事例分析–,日本ロボット学会誌,Vol.32, No.5, pp.473–480 (2014)
- [10] 環境研究総合推進費の概要:〈https://www.erca.go.jp/suishinhi/gaiyou/gaiyou_1.html〉(参照2023-07-31).
- [11] 小川聡久,加藤浩瑞,久保田耕介,山本純太,壺内良太,小野田弘士:非接触型ごみ自動投入システムの要素技術の開発とPoC (Proof of Concept),全国都市清掃研究・事例発表会講演論文集,Vol.44, No.57, pp.168–170 (2023)
- [12] 小川聡久,加藤浩瑞,久保田耕介,山本純太,壺内良太,菊池 亮,小野田弘士:非接触型ごみ収集に対応したごみの排出・反転プロセスの開発とPoC,廃棄物資源循環学会研究発表会,Vol.33, B3-1-O, pp.103–104 (2022)
- [13] 岡本拓郎,荒巻裕二,前田茂行:指定ごみ袋1袋あたりの排出重量調査(令和元年度),福岡市保環研報,Vol.45, pp.127–135 (2020)
- [14] 自律走行型配送ロボット「RICE」:〈https://www.asratec.co.jp/products/rice/〉(参照2023-07-31).
- [15] Nirde, K. et al.: IoT based solid waste management system for smart city, International Conference on Intelligent Computing and Control Systems (ICICCS), pp.666–669 (2017)
- [16] Maheshwari, A. et al.: To Improve Efficiency of Garbage Collection System for Smart Cities: Review Paper, International Conference of Advance Research & Innovation (ICARI), pp.202–205 (2020)
ogajanchan0317@akane.waseda.jp
早稲田大学大学院環境・エネルギー研究科博士後期課程.

早稲田大学大学院環境・エネルギー研究科修士課程.

早稲田大学環境総合研究センター主任研究員.

株式会社大栄環境総研取締役.

株式会社スマートロボティクス開発部.

株式会社スマートロボティクス開発部.

早稲田大学大学院環境・エネルギー研究科教授.
採録日 2023年12月25日