ロボットフレンドリービルディングに向けた館内交通ルールに関する実証実験
1.ロボットフレンドリービルを目指す背景
1.1 サービスロボット導入の動向
国内では少子高齢化に伴う労働力人口減少が深刻化しており,2030年には約640万人の不足が発生すると言われている.女性,シニア,外国人労働力の活用が謳われているものの,約300万人分の不足は生産性向上という人力に頼らない対策が必要とされる[1].特に,ビル管理分野においては,他の分野に先駆けて2015年前後から現場作業員が集まりにくい状況が続いており,コロナ禍以降も深刻度が増す傾向にある[2].
このような状況から,ビル内で清掃や警備を行うサービスロボットを見かけることも増えている.人とともに働く,協働ロボットの世界市場規模は,今後10年,年率20%で成長することが見込まれている[3].特に長時間,長距離,広範囲を対象にする業務の多くは人よりもロボットの方が得意な分野であり,適切に人とロボットで作業分担を行うことで,人手不足の解消,作業員の負荷の軽減,サービスレベルの向上が図れるものと期待される.
1.2 導入によって想定される課題
一方で,清掃や警備,配送を目的に自律走行を行うロボットは,これまでの建築計画や施設管理上は,当然想定されているものではない.そのため,物理環境,通信環境,運用環境いずれにおいても,解決すべき多くの課題が存在する.
物理環境の観点では,ビル内でロボットが乗り越えられない段差や傾斜,通過が困難な開き戸などが課題となる.
通信環境の観点では,ロボットの自律走行にはWi-Fiや携帯電話の通信規格であるLTE(Long Term Evolution)を利用するのが一般的であるが,施設共用部にWi-Fiが整備されていない,裏方のビル管理者動線ではLTEの通信環境が良好でない等のケースも珍しくない.さらに,セキュリティ扉を通過し,エレベータに乗車して別の階に移動するためには,ビル設備を改造し,ロボットとの通信を行う必要がある.
運用環境の観点では,従来の清掃業務等のオペレーションを,ロボットとの協働を前提としたものに見直す必要がある.また,ビルを利用する一般のユーザにとっても,ロボットは慣れない存在であるために,衝突の危険や災害発生時の避難支障を与えることが懸念される.
協働ロボットの普及に向けては,建物,ロボット,運用それぞれの観点から上記のような課題を解決するロボットフレンドリーな環境の構築が重要である.また,建物の事業者や管理者,設計者とロボットの開発者,提供者の間でのコミュニケーションと共通理解が不可欠である.
本稿では,オフィスビルの共用部で自律走行ロボットの利用を想定した実証実験を対象に,館内交通ルールの安全性や効率性の検証を行う.また,その実証の過程において建築設計を本業とする日建設計とロボットを提供するアスラテックの両者間での調整事項を具体に紹介することで,今後ロボット普及における実務上の一助になることを期待する.
2.館内交通ルールに関する実証実験概要
2.1 実証実験の目的
ビル管理業務の効率化を目指し自律走行ロボットの導入を検討する上で,人身・物損事故の発生が最も大きなリスクと言える.本実証実験は,安全性と運用効率の観点から,下記3点を目的として実施した.
- ① ロボット導入時の課題の抽出
具体的な建築空間内において自律走行ロボットを導入することにより発生し得る課題,特に建物利用者の安全にかかわる課題を抽出した.
- ② 課題に対する対策案の効果検証
課題への対策案を示し,対策案の導入方法と効果検証を行った.本実証実験においてはロボット自律走行時における交通ルールを模擬した対策を対象とした.
- ③ ロボット運用効率に関する影響確認
安全性を高めるためには,細かくルール設定することが望ましいと考えられるが,一方で,過度なルール設定は,ロボットのスムーズな運用に対する制約となり,タスク履行効率の低下につながるものと想定される.そのため,ルール設定の有無によるロボット運用効率への影響を確認した.
2.2 実施場所と期間
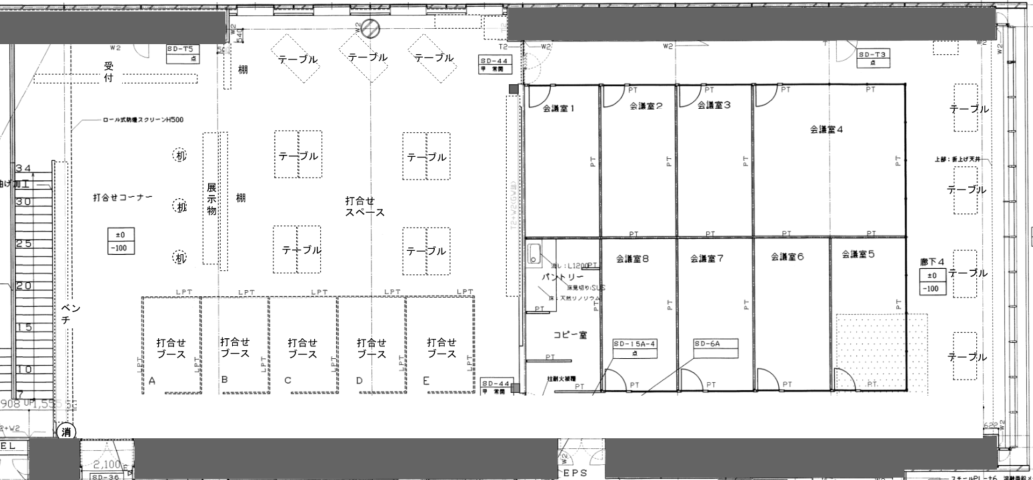
本実証実験は,日建設計東京ビル(東京都千代田区飯田橋2-18-3)の2階の受付・会議室エリアを対象に行った.対象エリアの平面図を図1に示す.
実施期間は2021年6月28日~7月9日の2週間とし,前半1週間は夜間での調整・試験走行期間,後半1週間は昼間来客がある状態での実証実験を行った.
2.3 実証実験方法概要
自律走行ロボットRICE(詳細後述)1台を利用し,受付から会議室までの来客誘導および物品(ペットボトルのお茶)配送のシナリオによる実証実験とした.
課題抽出は,図面調査および現地調査,ロボットの初期設定時の調整・試験走行を通して行った.対策としての交通ルールは,事前調査で抽出した課題を対象に仮説を立てて設定し,ロボットの管理システム上に反映した.運用効率については,ロボットが1タスク(たとえば受付から会議室に来客を誘導し,そこから受付まで戻ってくるまで)にかかる時間を測定し評価した.
2.4 使用するロボット概要
本実証実験に用いたRICEはアスラテックが日本展開を行う,屋内向けの配送ロボットである.ロボット内に荷物を収納し,ロック機能によりセキュリティを確保して配送を行うことができる.また,エレベータやセキュリティ扉ともシステム連携を行うことが可能で,フロアを跨いだ広い範囲での運用を行えるため,ホテルやオフィスビルなどで導入が進んでいる.図2に配送ロボットRICEの外観を示す.

自律走行やマッピングにはLiDAR(Light Detection And Ranging)を用い,深度カメラや超音波センサにより障害物を検知することが可能である.また,LTEもしくはWi-FiによってRiceCoreと呼ばれるクラウドシステムや,各種外部システムと通信することができる.
2.5 ロボットの制御システムの概要
ロボットの制御は専用のオペレーティングシステムであるRiceOSによって管理されている.RiceCoreのWebUIへのアクセス権を持つアスラテックの担当者は,マッピングした地図データ上へのWaypointと呼ばれる移動経路上の中継点の設定,走行パラメータやセンサの調整等が可能である.ロボットは最新の設定パラメータをクラウドから取得して使用する.また,ロボットの管理者(今回の場合は日建設計,アスラテックの双方の担当者)はロボットの位置やステータス等をWebコンソール上で確認することが可能である.
OSの上にはRiceアプリというアプリケーションが載っており,ユーザはアプリをRICEのタッチスクリーンでタッチ操作する.アプリでは主に以下のことができる.
- あらかじめ定義したジョブやタスクの実行(配送ルートの指定等)
- ショートメッセージ,Eメール,電話等による通知(目的地到着時やエラー等の通知)
- 設備(エレベータやセキュリティ扉等)やロボット管理プラットフォームといった外部システムとの連携
アプリは目的や用途に合わせてカスタマイズされており,開発・提供はアスラテックが行っている.
ロボットが自律走行する際には,地図データ上に設定されたWaypointを目的地として設定し,基本的に最短ルートでの走行を行う.ただし,センサで障害物などを検知した場合は走行の停止/再開や迂回等を行う.
3.課題抽出と対策案
3.1 図面調査および現地調査によって抽出された課題
実証実験に先立ち,建築図面による実証実験空間の形状・内装仕様・防火設備配置の確認および現地における家具配置・利用状況調査等から下記の課題が抽出された.
- 課題① 人との衝突の危険性
見通しの悪い曲がり角や扉を開けた目の前の廊下などでの衝突が懸念される.ロボット自身にはセンサにより,障害物を検知した場合に停止する機能があるが,人がロボットに気づかずに動くことで衝突の可能性がある.
- 課題② 家具等への衝突の危険性
ロボットは周囲の障害物をLiDARや超音波センサなどで認識し,回避する機能がある.しかし,センサ検知範囲外に突出している障害物,ガラスや反射率の高い素材などセンサが正常に働かない状況において衝突する恐れがある.
- 課題③ 防火扉との干渉
対象空間内には火災時に閉止して,延焼を防止するための防火扉が設置されている.防火扉は通常時は壁内に収納されていて,火災信号を受けて自動で閉止する仕組みとなっている.火災発生時に,この防火扉の開閉軌跡内にロボットが停止したままとなっている場合,防火扉の閉止に支障が発生し,人命にかかわる影響が発生する恐れがある.
- 課題④ ロボット同士の交錯
今回の実証実験で利用するロボットは1台のみだが,実際に来客誘導や物品配送を館内に実装する場合は,複数のロボットを同時に運用する必要があると想定される.将来複数ロボットが導入された場合,ロボット同士が鉢合わせることでスタックし,施設利用者の廊下の通行,場合によっては避難の支障となることが懸念される.
3.2 館内交通ルールの検討
図面調査および現地調査で抽出された課題に対して,屋外一般道を参考にしたロボット用の館内交通ルールを設定した.図3に本実証実験で想定した館内交通ルールを示す.
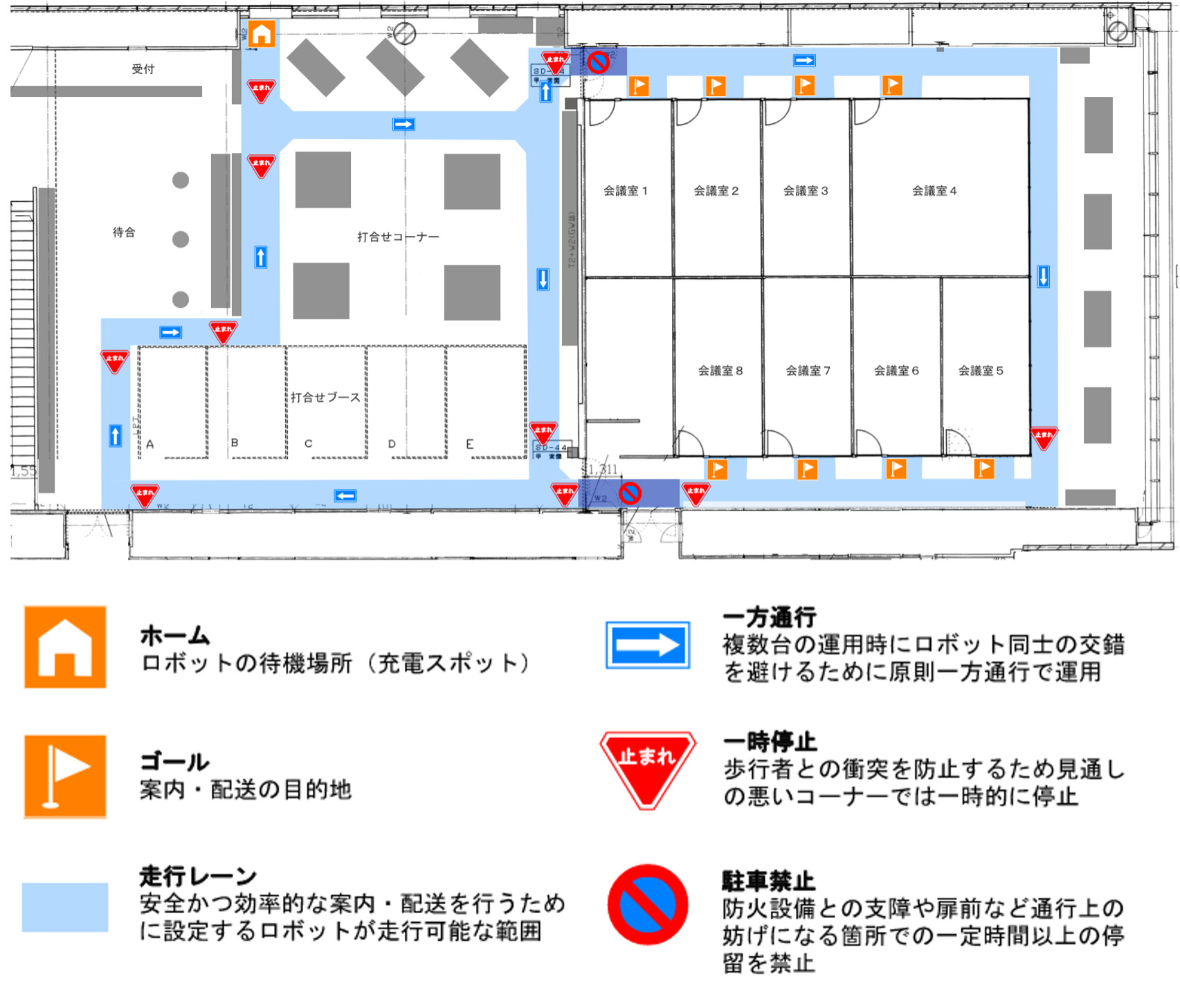
- ① 一時停止
課題①の歩行者との接触を回避することを主な目的として,曲がり角または人の動線を横断する個所において一時停止のルールを設定した.曲がり角から少しだけ顔を出した位置で停止することで,歩行者から視認しやすくすることを期待した.
- ② 走行レーン
課題②の家具等への衝突を回避するため,ロボットが走行可能なエリア(走行レーン)を設定した.LiDARや超音波センサで検知できない恐れのある家具が設置されているエリアは,ロボットが進入しないよう走行レーン外とした.また,扉前など人との衝突の恐れがある場所においては回避可能な扉前空間なども走行レーンから外すことで,課題①への配慮も行った.
- ③ 駐車禁止
課題③の防火扉との干渉を回避するため,防火扉の開閉軌跡内にロボットが停止しないことを求めるルールを設定した.軌跡内の通過も含め不可とすることも考えたが,通常防火扉や防火シャッターは通路幅全体を対象とするため,通過は許容した.
- ④ 一方通行
課題④のロボット同士の交錯を回避する目的で,一方通行のルールを設定し,ロボット同士が正面で鉢合わせる事象をなくすことを期待した.
3.3 ロボットに対する館内交通ルールのインプット
前節で示した館内交通ルールをロボットにどのように遵守させるか(どうインプットするか)が次の課題となる.
ロボットの制御プログラム自体を書き換えることで,想定したルール通りの動きを強制する選択肢もあるが,本実証実験では汎用性の観点から,RiceCoreのWebUIまたはRiceアプリ機能を用いて設定可能な範囲でルールを実現することとし,下記のように設定した.
- ① 一時停止
Waypointと呼ばれる移動経路上の中継点を設定し,その地点で一時停止した後,走行を再開することとした.
- ② 走行レーン
走行可能なレーンを設定するのではなく,仮想壁の入力により進入禁止エリアを設定することで実現した.
- ③ 駐車禁止
当初は駐車禁止エリア内では停止しないような設定を想定していたが,先述の通り,安全上,人や物との衝突を避けるためにロボットが停止する必要もある.そのため,走行エリア内の特定の座標内に停止した場合に,施設管理者(今回は実証実験担当者)にショートメッセージで通知することで代替した.また,停止後に通常動作に復帰し,駐車禁止エリアを脱した場合には,その旨も同様に通知することとした.
- ④ 一方通行
走行レーン内において,走行可能な方向を制限する設定はできないため,各シナリオのスタート地点から目的地までのルートおよび,目的地からの帰りルートに,それぞれWaypointを設定し,単純な最短経路ではないルートを走行させることで一方通行を実現した.
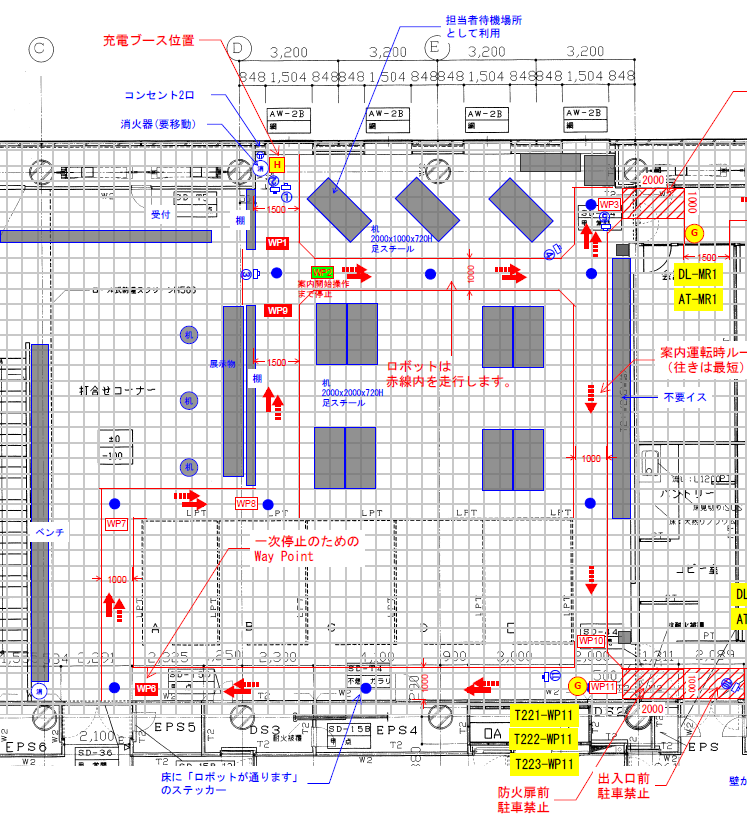
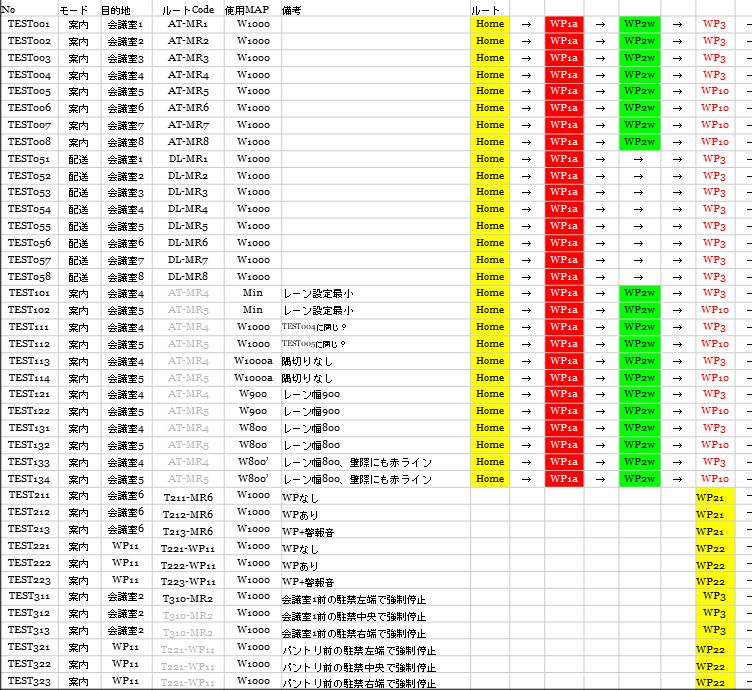
これらのルールは日建設計で図面調査および現地調査を踏まえ検討を行い,それらをアスラテックでWebUIまたはRiceアプリ上で入力を行った.両社での情報共有には図4,図5に示すようなシートを用いて,平面上の配置や各シナリオの条件を明確にした.
3.4 現地での初期設定・調整
ロボットを現地に搬入して以降の初期設定・調整作業として下記を実施した.
- ① 通信の確認
電波強度を確認し,通信手段としてLTEを選択した.
- ② 充電器の設置
電源や自動充電動作に必要なスペースを備え,また運用上最適と思われる場所(ロボット待機場所)に設置した.
- ③ マッピング
ロボットをマッピングモードに切り替え,走行対象エリアを手動リモコン操作にて走行させることで,LiDARで検知した周辺環境の点群データから自動で地図データを作成した.
- ④ マップの修正
マッピングで作成した地図データを,画像編集ソフトを用いて編集した.主に,余分な映り込み部分の削除や侵入禁止線の書き込みなどを行った.
- ⑤ Waypointの作成
RiceCoreのWebコンソール上でWaypointの作成を行った.WaypointはX座標,Y座標,θ(向き)情報を備え,登録された地図上にプロットして確認が可能である.
- ⑥ アプリ調整
走行ルート設定や通知設定を含むシステム連携等のカスタマイズを行った.
- ⑦ 走行テスト
設定したルートを実際に走行させて,問題なく走行可能か,修正対応必要な場所があるかを確認した.
- ⑧ 走行調整
主に地図データの編集,Waypointの編集,ロボットの設定(走行パラメータ調整,センサ設定)等の調整を行った.調整後は再度走行テストを実施した.
3.5 マッピング時に確認された課題と調整事項
マッピング等の現地初期設定作業の中で,事前に予期されていた課題の確認を行うとともに,新たに発見された課題に対し,調整・対策を行った.
3.5.1 LiDARで検知できない障害物
事前の課題②の内容について,現地にて実際のロボットに搭載されたセンサを用い確認を行った.図6に作成された地図データを示す.図7に示す机・椅子,ベンチ,すりガラス,パーテーションの金属部分の4項目が,LiDARによるマッピングで検知されない障害物であった.
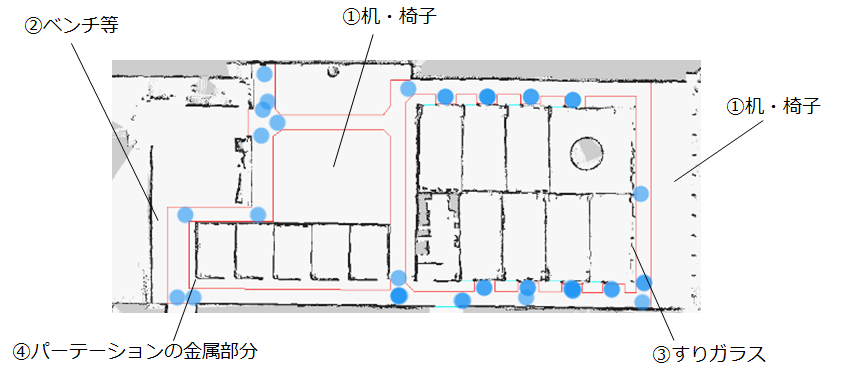

左上:①机・椅子 右上:②ベンチ
左下:➂すりガラス 右下:④パーテーションの金属部分
机・椅子はそれぞれの足が細いステンレス素材であり,2次元LiDARで検知しやすい面がなかったことで認識されなかったものと考えられる.
ベンチはLiDARが設置されている床上75cmの高さよりも低い約40cmの位置に座面があるため認識されなかった.
すりガラスは,場所によって検知された個所とされなかった個所があった.外壁の窓ガラスに近いエリアで検出されにくかったことから,外光の影響があるものと考えられる.
パーテーションは,机・椅子と同様に,コーナー部分に細いステンレス素材が用いられていたことが原因と考えられる.
走行レーンはこれらの障害物を避けるよう設定,調整を行った.
3.5.2 吹出口による超音波センサ異常
本実証実験空間は,空調が床から吹き出す方式となっていたが,床面の吹出口の付近において,走行試験中にロボットが障害物を避けるような停止,方向転換等の所作が観測された.図8に床吹出口の写真を示す.
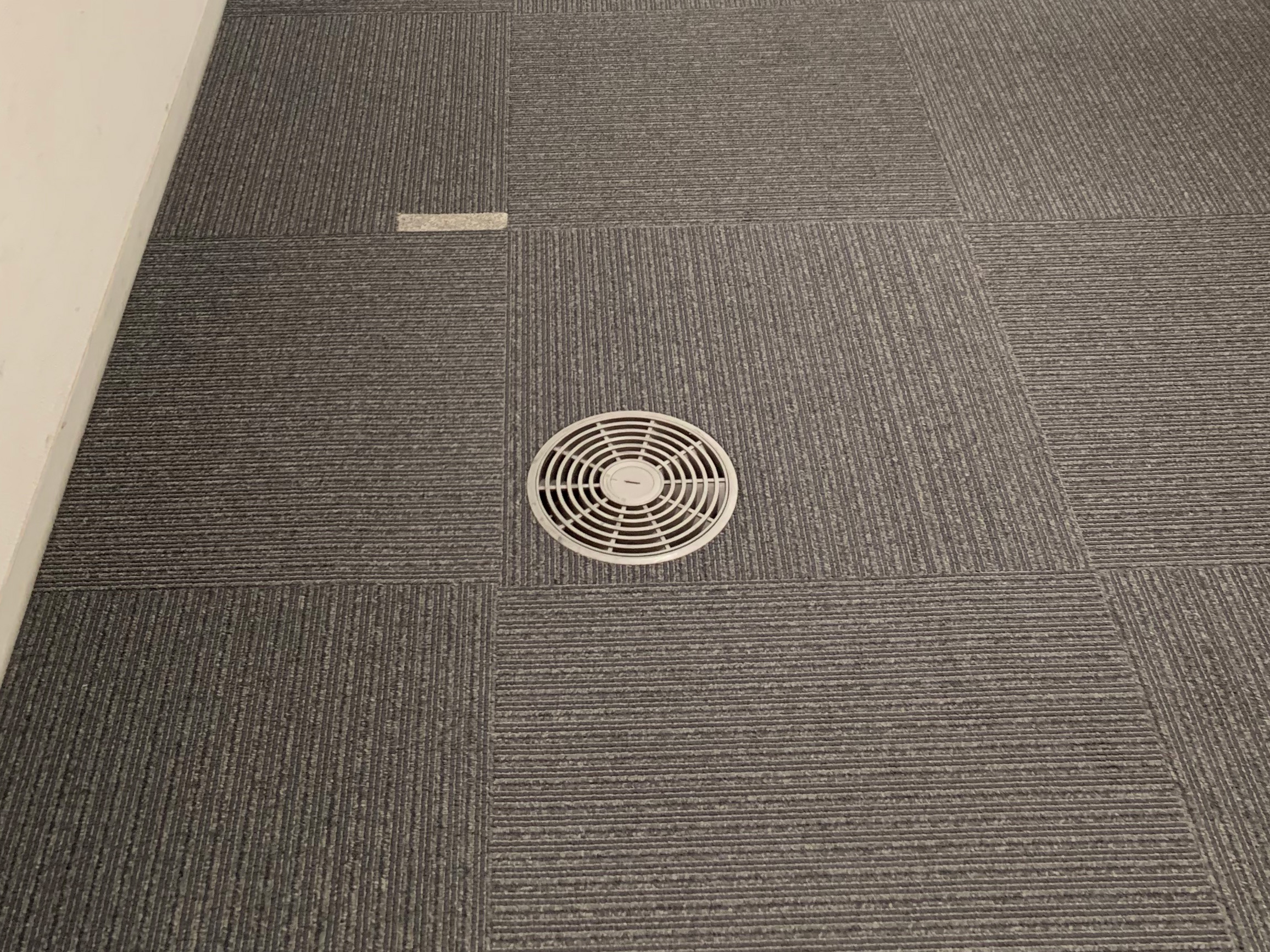
周辺室温は26℃程度であるのに対し,床吹出口からは18℃程度の冷気が送風されていることから,温度の境界面を超音波センサが障害物と誤検知したことが原因だと想定した.
この対策として,走行レーンと床吹出が干渉するエリアにおいては超音波センサをOFFとすることで,床吹出口付近での異常な所作は改善された.安全上,超音波センサをOFFにすることは最小限とすべきであるが,今回の対象範囲は,直線上で,障害物なども置かれていないところであったために,このような対策が可能と判断した.
3.5.3 床面滑りによるオドメータ誤差
長い直線廊下を通過した先に設定したWaypointにおいて,ロボットの停止位置が手前にずれる(設定したWaypointに到達しない)事象が発生した.車輪の滑りによるオドメータ(走行距離計)から認識するロボット自身の位置情報に誤差が生じたことが原因であると想定された.
走行エリアは原則タイルカーペットが敷設されていて,ロボットの走行上,滑りの懸念はないが,当該事象が発生した個所は,先述の床吹出口が設置されていた.床吹出口は樹脂製かつ数mm周囲より高いため,ロボットの車輪の滑りやズレが発生したものと考えられる.
対策としては,複数回の試験走行の結果をもとにWaypointの位置自体をずらすこととした.ルートを変更する,タイヤの形状や表面材料を変更し滑りにくくするなどの方法も考えられるが,今回はロボットの管理アプリケーション上で設定可能な範囲での対策とした.
3.5.3 曲がり角の走行エラー
LiDARで検知できない障害物で挙げた「すりガラス」のある曲がり角において,一時停止のWaypointから角度を変えて右折をしようとするが,進入角度がきつすぎて壁に衝突する,または直前で停止しスタックするという事象が発生した.
すりガラスの検知が十分できていなかったことに加え,曲がり角の前が直線の長いルートであったことから,ロボットの自己位置推定にずれが生じたことが原因と考えられる.
対策として,一時停止用のWaypointの先に,Waypointを1点追加して2段階右折のような走行ルートとすることで,このエラーは解決された.
3.5.4 初期調整の有無による運用への影響
これら一連の初期調整には,最低限の設定作業(マッピング,Waypointの設定,走行テスト等)に延べ11時間,走行試験を受けての不具合調整に延べ20時間を要したが,その結果,各シナリオにおける履行時間は,平均で22%(111秒),最大では会議室2への案内のシナリオにおいて41%(257秒)短縮された.図9に調整前後での各シナリオ履行時間の比較を示す.
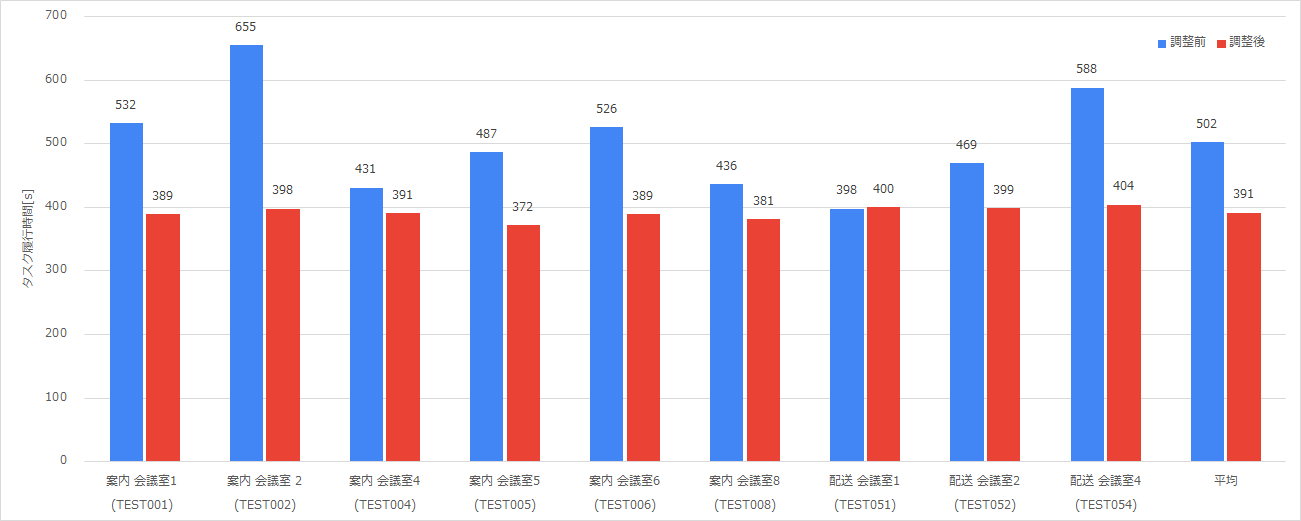
安全性を高めることとともに,ロボット利用の効率化の面でも,初期の不具合に対する適切な対策・調整が重要であることが示唆された.
4. 実証実験の結果
4.1 館内交通ルールの効果
実証実験で設定した,館内交通ルールについて,想定通りに動作するか確認し,そのうえで安全性の向上に寄与しているか,運用効率にどの程度影響するかを確認した.
4.1.1 一時停止の有効性の検証
一時停止の設定は,Waypointを用いることで,想定機能を比較的容易に満足することができた.安全性の観点で,定量的に評価することはできていないが,扉前の廊下部分を停止なしで通過する場合と,一時停止して通過する場合とで,人からの視認性はあきらかに異なることを確認した.図10に一時停止をしているタイミングでの写真を示す.さらに,一時停止に加えて音を鳴らすことを実験し,音を鳴らさない場合よりも人がロボットの存在に気づきやすくなり,安全性がより高まる可能性が確認された.ただし,音を鳴らす場合には,周囲の環境に配慮しつつ,注意喚起をするのに適切な音量設定が必要であることも示唆された.
4.1.2 走行レーン設定による安全性と効率性の検証
走行レーンを設定しない場合,先述のLiDARで検知できない障害物への衝突が発生することが確認された(実験時は衝突直前で手動操作により強制停止した)ため,障害物周辺の走行レーン設定は必須であると言える.
一方,障害物の影響がないルートでは,レーン設定を行うことでロボットのタスク履行時間が長くなるシナリオもあった.追加実験で直線部分での走行レーン幅を1000mmと800mmの2パターンとした比較も行ったが,幅を狭く制約することでタスク履行時間が10〜15%(40〜59秒)長くなった.
ロボットの安全性と効率性のバランスを考慮した上で,レーン設定は障害物や人との接触の恐れのある範囲に限定し,それ以外の場所はWaypointを適切に設けてロボット自身の自律走行機能を活かした方がスムーズな運行に繋がる可能性がある.
4.1.3 一方通行の設定による効率性の検証
一方通行については,将来複数のロボットが1つの空間内をそれぞれ自律走行する際に鉢合わせしてしまうケースを想定してルール設定を行った.しかし,1台のロボットで実施した今回の実証実験では複数ロボットが同時に走行する環境を実現することはできなかった.
本検証では,Waypoint機能を利用して一方通行を実現したが,この場合,前方の障害物を検知し,ロボットが障害物を回避できないと判断すると,目的地までのルートを再計算し,条件によっては逆走してしまう事象が露呈した.たとえば,会議室の周囲のような環状の廊下においては,時計回りの一方通行としている場合であっても,前方に障害物(人)を発見すると,反時計回りのルートでの目的地到達を目指して逆走をはじめ,また途中で再計算して時計回りルートに復帰する動きを見せた.
マップ上にない一時的な障害物については,人など動くものである可能性が高いので,障害物付近で一定時間待機するなど,逆走防止策が必要と感じられた.
また,一方通行には運用上の課題もあった.今回のシナリオの1つとして来客の誘導を扱ったが,この場合,一方通行でわざわざ遠回りをさせて誘導するのは明らかに不適切である.
ロボット単独の動きでも,最短経路で行き来する場合と,一方通行の場合で9~23%(34~90秒)程度の差異が発生した.
複数ロボットでの対面時・すれ違いルールは必要とは思われるが,その対策として一方通行ルールの採用は課題が多いことが明らかとなった.
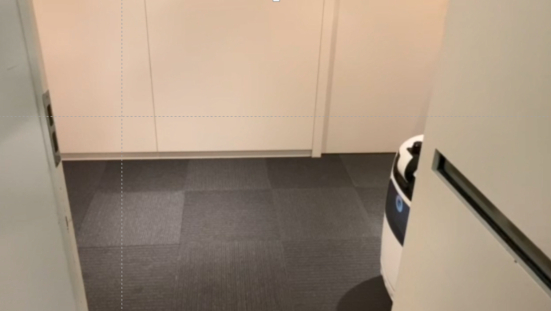
4.1.4 駐車禁止エリアにおける挙動の検証
駐車禁止エリア内でロボットが停止した際の挙動を検証した.停止動作については,ロボットを人が取り囲むことで実現した.その結果,停止したタイミングにて担当者へのショートメッセージが送信されたことを確認できた.また,その後,走行を再開し駐車禁止エリアから脱出した際にも,同様のメッセージが通知されたことを確認した.図11に防火扉前で停止状況とショートメッセージの画面を示す.
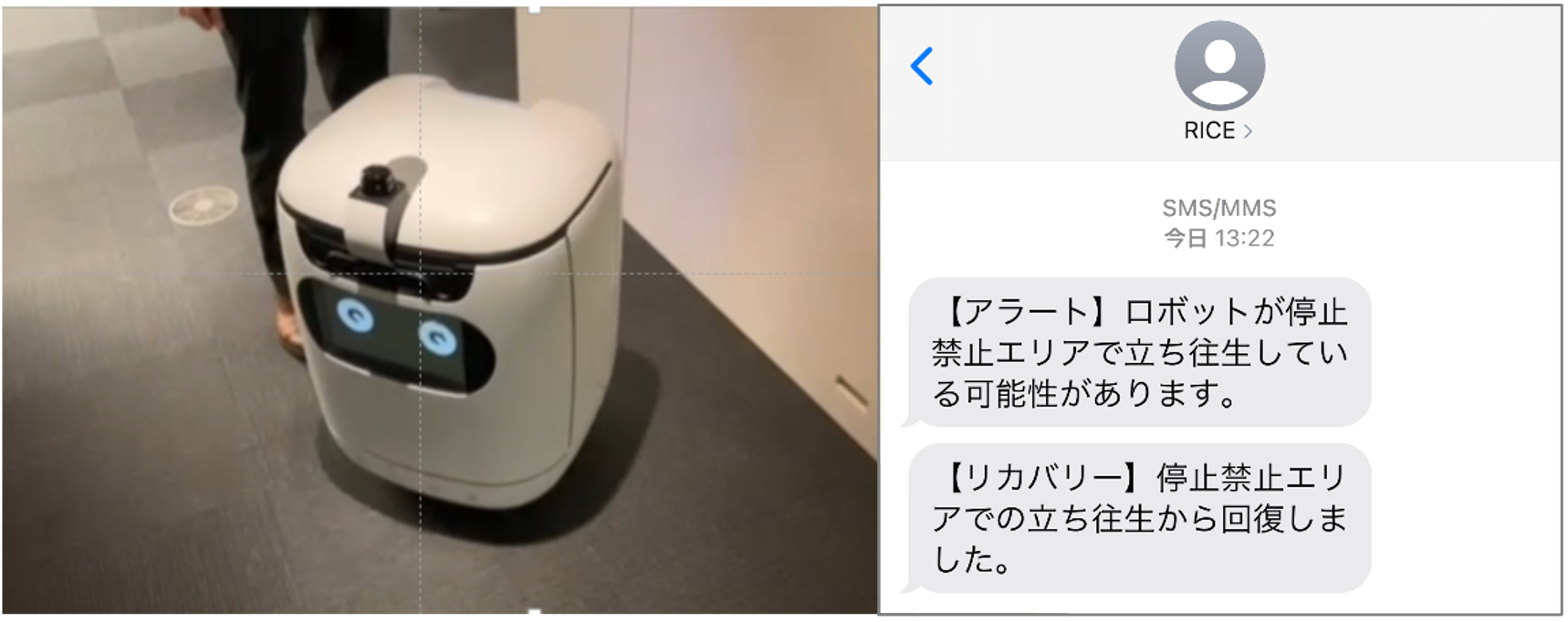
この機能は,建物内の防火区画をまたいで自律走行するロボットに対しては,最低限求めたい機能の1つと言える.
4.2 施設利用者の声
実証実験の期間中に来客を含む実験参加者および実験見学者からさまざまな要望,感想が寄せられた.大別するとロボットの動作に関するユーザ体験(UX),画面操作に関するユーザインタフェース(UI)に関するものが多かった.
UXに関しては,走行スピードが遅すぎる,人の動きに合わせて待ってほしい,会議室に到着したかどうか分からない,しゃべってほしい,ロボットの進行方向が分かるとよい等のコメントがあった.利用者それぞれがロボットに期待する機能と実際の動作のギャップを埋めるための改善が必要であると思われる.
UIに関しては,画面操作後にリアクションがあった方が良い,蓋の開閉方法が分かりにくい,タッチパネルの表示内容もかわいげがあった方が良いなどの意見があった.分かりやすさという意味で標準化も必要である一方,ロボットのキャラクタに合わせたUIであることも求められている.
そのほか,かわいい,見守っていたくなるなどの声も多く聞かれた.ロボットフレンドリーな環境構築の一要素である周囲の人々の需要性の観点で,かわいさ,愛着を持てるか否かも重要であると考えている.
5. ロボットフレンドリービル実現に向けた今後の展望
本実証実験を通して,限定された空間ではあったものの,ロボットを導入する際の安全上,効率上の課題を多く抽出することができた.しかし,今後はセキュリティ扉の通過やエレベータへの乗車も含めた館内広範囲の空間での移動を想定した課題抽出が必要になる.また,複数ロボットを利用する際の課題抽出も必要と思われる.
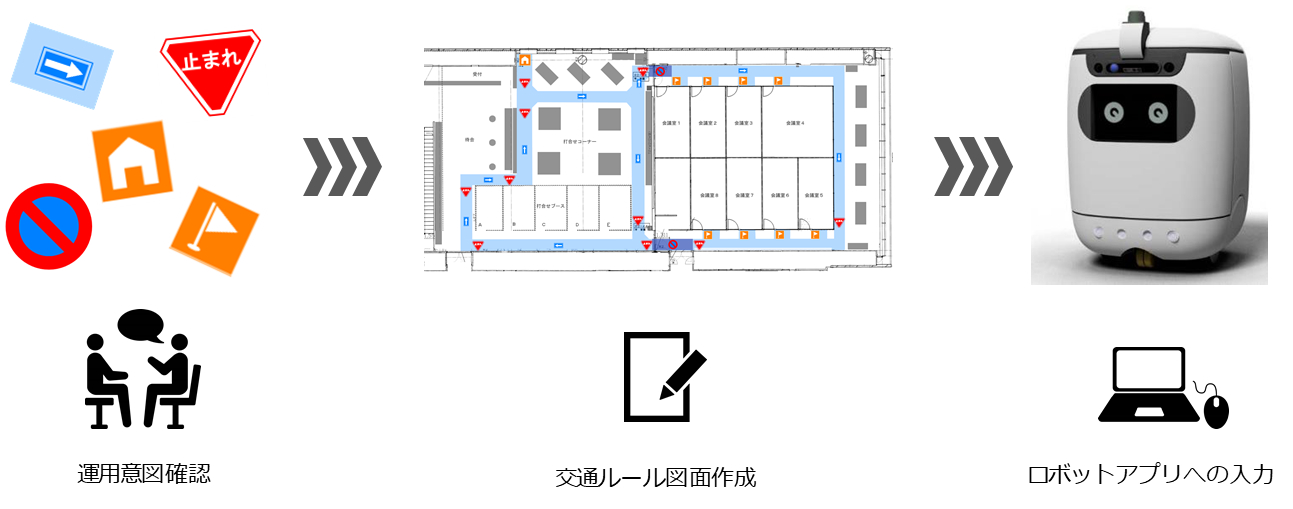
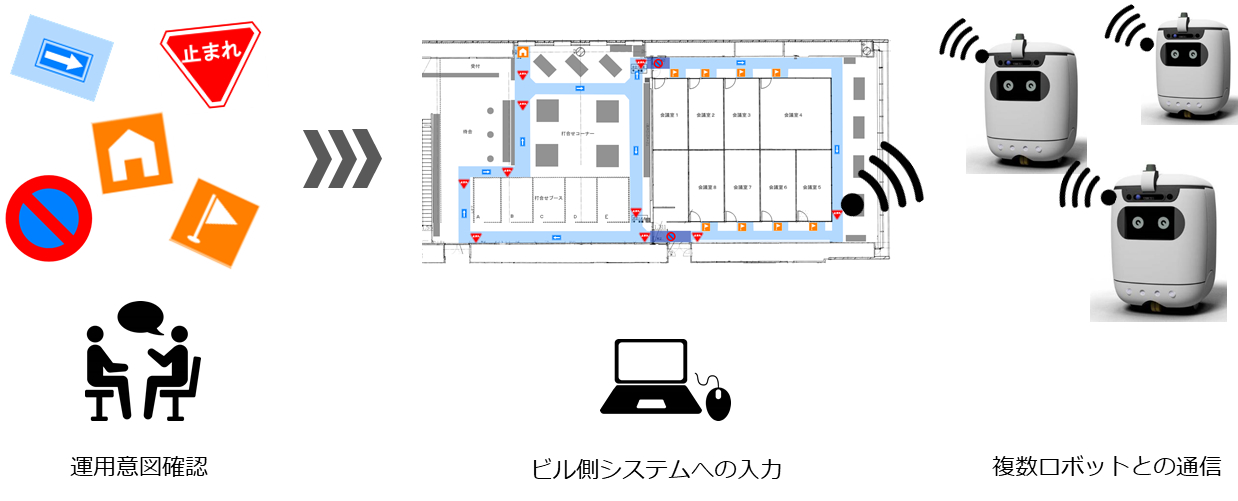
安全対策としての館内交通ルールのうち,一時停止や駐車禁止については多くの建物および多くのロボットにおいて汎用的なルールとなり得ると考えられる一方,走行レーンや一方通行については,設定方法なども含め再考が必要である.また,現状は各ルールをロボット管理アプリケーションにて,ロボット1台1台に入力している(図12)が,将来多くのロボットを建物に導入することを想定した場合,複数のロボットを統合的に管理するビル側システムから各ロボットにルールを通知し,インストールする手法が必要になると考えられる(図13).
本実証実験以降,経済産業省の革新的ロボット研究開発等基盤構築事業[4]およびロボットフレンドリー施設推進機構[5]において,エレベータやセキュリティシステムとロボットとの連携規格の構築,ロボットが自律走行しやすい空間の評価指標であるロボフレレベルの開発,ロボット群管理システムの協調領域の検討などが進められている.
建物関係者,ロボット関係者双方の継続的な連携により,ロボットと建物を結ぶルールの規格化,標準化が進むことにより,安全かつ容易に建物にロボットを導入し,人手不足が解消されることが望まれる.
参考文献
- 1)パーソル総合研究所・中央大学:労働市場の未来推計2030,2018/02/21,https://rc.persol-group.co.jp/thinktank/spe/roudou2030/ (2023年11月30日現在)
- 2)ビルメンテナンス情報年鑑2022,https://www.j-bma.or.jp/data/56453 (2023年11月30日現在)
- 3)(株)矢野経済研究所:プレスリリース,No.3209,協働ロボット世界市場に関する調査を実施(2023年),2023/03/01,https://www.yano.co.jp/press-release/show/press_id/3209 (2023年11月30日現在)
- 4)経済産業省:ニュースリリース,ロボットフレンドリーな環境の実現に向けた取組が加速しています,2022/10/5,https://www.meti.go.jp/press/2022/10/20221005001/20221005001.html (2023年11月30日現在)
- 5)ロボットフレンドリー施設推進機構:お知らせ,2023年度キックオフミーティングが開催されました,2023/03/16,https://robot-friendly.org/information/2023%e5%b9%b4%e5%ba%a6%e3%82%ad%e3%83%83%e3%82%af%e3%82%aa%e3%83%95%e3%83%9f%e3%83%bc%e3%83%86%e3%82%a3%e3%83%b3%e3%82%b0%e3%81%8c%e9%96%8b%e5%82%ac%e3%81%95%e3%82%8c%e3%81%be%e3%81%97%e3%81%9f/ (2023年11月30日現在)

後藤 悠
yu.goto@nikken.jp
2007年(株)日建設計入社,設備設計グループを経て,2022年よりスマートプラスラボ ラボリーダー.ビル管理におけるIoT・ロボットの活用,設計システムの効率化に取り組む.

小野哲晴
tetsuono@asratec.co.jp
2016年アスラテック(株)入社.2020年より配送ロボットRICEの日本展開事業を開始.ロボットサービス事業推進部 部長.
谷口洋平
taniguchi.yohei@nikken.jp
2008年(株)日建設計入社,設備設計グループ所属.2022年よりスマートプラスラボ兼務.専門は電気設備設計.スマートビル,館内物流におけるロボットの活用に取り組む.
渕上敏生
fuchigami.toshio@nikken.jp
IT系企業を経て,2019年(株)日建設計入社.現在サスティナブルデザイン部とデジタルソリューションラボを兼務.建物運用を支援するクラウドデータベースの開発を担当.
舘景士郎
tachi.keishiro@nikken.jp
2009年(株)日建設計入社,設備設計グループを経て,現在DEL(Digital Engineering Lab)兼スマートプラスラボアソシエイト.専門は建物やパブリックスペースのファサードの環境エンジニアリング.
黒羽亮一
kuroha.ryoichi@nikken.jp
2018年(株)日建設計入社,設備設計グループ所属.専門は電気設備設計.設計に加えロボットフレンドリーに関する実証実験も担当.
滝澤 総
takizawa@nikken.jp
1989年(株)日建設計入社,設備設計グループを経て,現在デジタル推進グループシニアダイレクター.2004年から電気設備学会の地球環境委員会委員長.
角田大輔
tsunodad@nikken.jp
2002年(株)日建設計入社,プレゼンテーション室を経て,現在DDL(Digital Design Lab)ダイレクター.専門は先端のテクノロジー×情報によるデジタルデザイン.建築情報学会理事.
採録決定:2024年1月10日
編集担当:西尾直也((株)日立製作所)
会員登録・お問い合わせはこちら
会員種別ごとに入会方法やサービスが異なりますので、該当する会員項目を参照してください。