人とロボットが共存・協働・協調できる空間の社会的価値の考察
─川崎重工Future Lab HANEDAの挑戦─
1.背景と川崎重工の取り組み方針
少子高齢化への対応は日本だけでなく,グローバルでの課題として認識されており,特に日本に着眼すると「生産年齢人口」の減少に伴う労働力不足はあらゆる業界で大きな課題としてとらえられている.図1に示すように2030年には小売,医療・福祉,サービスの領域で600万人以上の労働人口不足になることが推察される.
![図1 2030年日本における労働人口不足の予測 [1]](../58/DP6505-S05/image/image01.png)
次に,製造業に着眼し,世界各国のロボットの活用状況を考察してみると図2に示すように現在のロボットが利用されている領域はいまだ数パーセントの状況にある.裏返せば,ロボットの可能性と期待値が残された領域が日本国内でも96%あることを示している.まだロボット化がされていないことに加えて,グローバルで見てもロボットの適用や活用できる可能性は大いに残されている.ロボティクスの技術進展や革新とあわせて,人を中心に考えたロボティクスの社会展開が期待される.
![図2 各国の製造業におけるロボット導入率[1]](../58/DP6505-S05/image/image02.png)
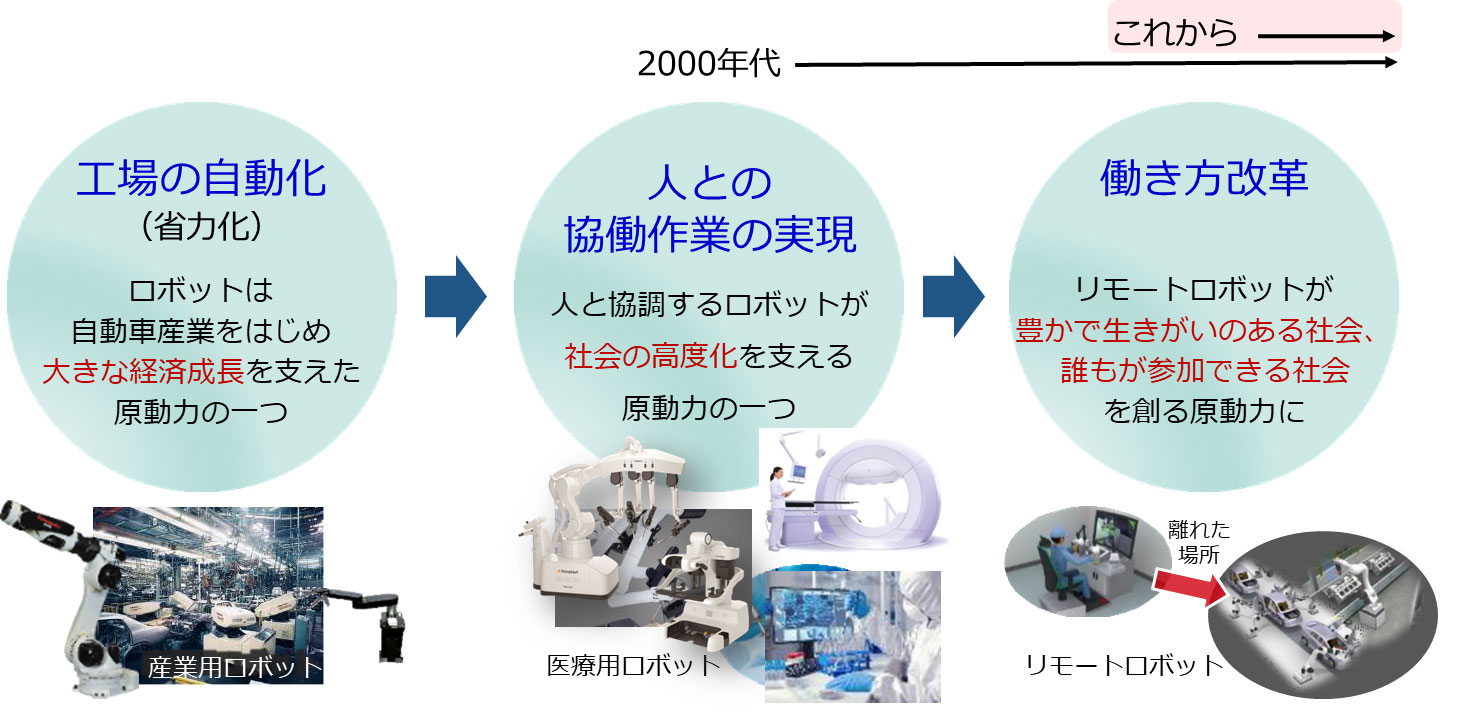
ロボットが取り組んできた今までの社会課題とこれからの期待を整理したものを図3に示す.社会貢献,ロボティクスの可能性の追求として,工場の自動化が進められ1960年代に自動車産業を中心に経済の原動力を支えてきた.2000年代に入ると人とロボットが共存できる技術,仕組みが整い,医療用ロボットの実用化が進んだ.人との協働作業の実現によるロボティクス適用が広がりつつある.さらには働き方改革として,リモートロボットの展開が豊かで生きがいのある生活,誰もが参加できる社会を創る原動力になると考えている[2][3].これからは人とのより高度な協調化による身体的,精神的に負担感が低減でき,かつ生産性を両立できる社会の仕組みや技術の定着が期待され,実証研究などが進みつつある[4][5].段階的にはロボットの自律性が確保できるまではリモート支援を行い,そのプロセスから得られる技能獲得や判断材料を蓄積し,人とロボットが相互扶助することで人はより働きやすく,生産性を持続していくことが重要になる[6].
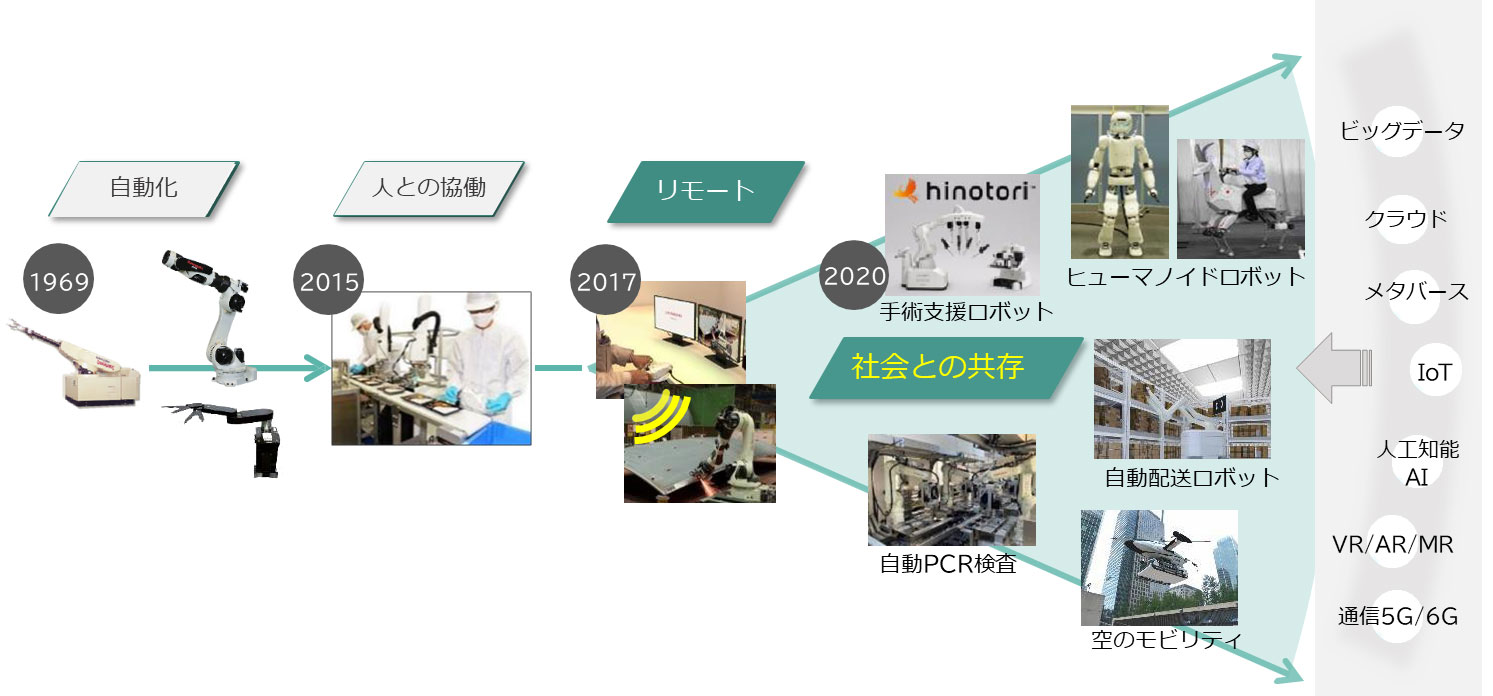
ロボットは社会と共存する新たな進化の段階へ入っていくと推察される.図4に示すように自動化,人との共存,協働,そしてリモート技術を活用した働き改革と技能の獲得,知見の体系化が進展していくと推察される.産業用ロボット技術を起点に社会からの要請に応えるべく,コロナ禍に対してはロボット活用した自動PCR検査システム[7]を川崎重工は社会に提供した.また,2020年代からは手術支援ロボット「hinotori」[8]を医療の少子高齢化と高度化に対応すべく実用化してきた.自動配送ロボット[9],ヒューマノイドロボット,空のモビリティなど社会的手段としてのソーシャルロボティクスはまさに黎明期であり,川崎重工はこれからも総合ロボットメーカとしてチャレンジしていく.
川崎重工の中で2030年を目線とした活動を紹介する.図5に示すように,安心安全リモート社会の実現に向けて,川崎重工の遠隔操縦ロボットシステムSuccessorの産業定着に取り組んでいる[10].図5の左は塗装作業の例であるが,塗装ブースの中に人は入らずに遠隔で塗装ロボットを操作し,人の技能を習得し蓄積する仕組みである.ロボットの自律化に向けて,人の作業のカンコツをロボットに継承できることを目指している.また,このような遠隔技術を活用して,誰もが自宅にいながら作業支援,社会参画できる仕組みをリモートロボティクス社がサービス提供を開始している[3].
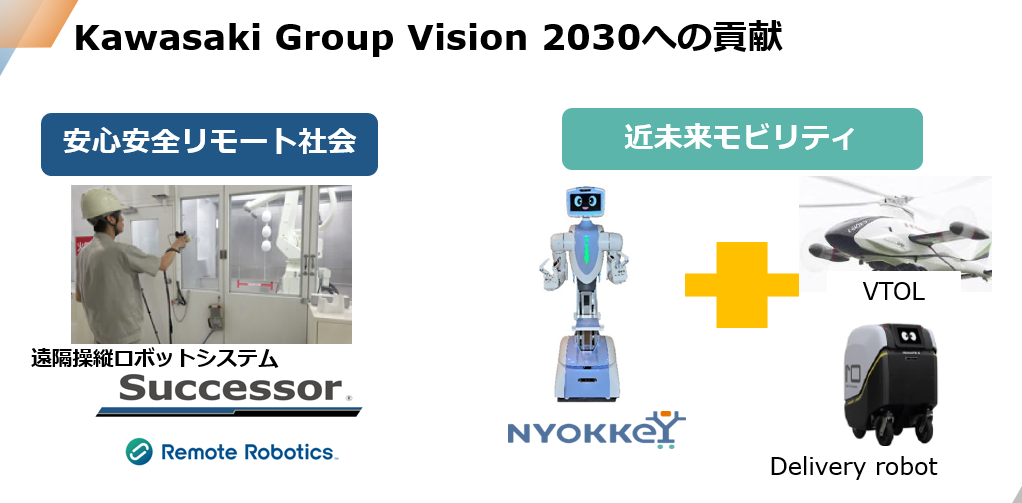
川崎重工は陸海空のモビリティ技術・ビジネスのスキームを保有しており,これらを互いに連携し合う仕組みについても取り組んでいる.本稿ではこの中でもモバイルマニピュレーションとして図5の右のNyokkeyを活用したFuture Lab HANEDAでのレストラン形態での社会実証[11]を精力的に取り組んでおり本稿の2,3章で紹介する.その活動の中で見えてきた課題と取り組みについて4章で紹介し今後のFuture-workについて整理する.
2.Future Lab HANEDAでの活動のねらいと概要
本章では,川崎重工が開設したFuture Lab HANEDAのねらいと,運営について解説する.
2.1 施設の紹介
図6に示す「Future Lab HANEDA」は,川崎重工,ICMG,きらぼし銀行の3社が,羽田空港(日本空港ビルデング,羽田未来総合研究所),大田区と共創し,羽田空港に隣接する「先端」産業と「文化」産業を融合した「羽田イノベーションシティ」において,さまざまな社会課題解決に向け,実証実験,社会実装といった目に見える形の具現化を重ねていくことで,未来につながるエコシステム(持続可能なサービスの生態系)構築を目指す「羽田共創プロジェクト」の一環として,川崎重工が2022年4月20日に開設したロボティクスを活用した社会課題解決のための施設である[12].

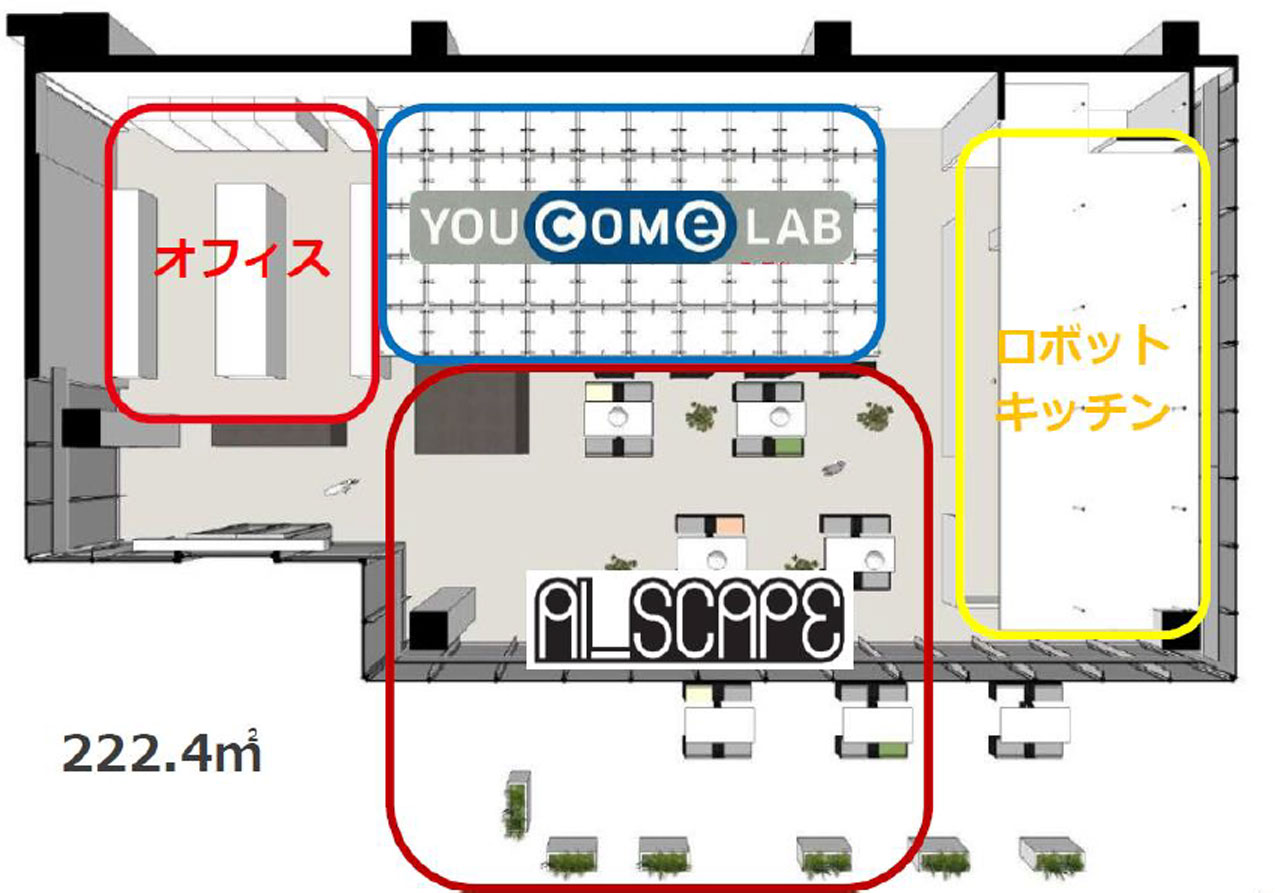
「Future Lab HANEDA」は,図7に示すようにレストラン型の実証実験場「AI_SCAPE(アイ・スケープ)」とオープンイノベーションを加速する開発施設「YouComeLab(ユーカムラボ)」の2つの施設から構成されている.
「AI_SCAPE」は,新たなロボットの社会実装として,調理・配膳などレストランの作業をすべてロボットで行うことを目標とし,一般の利用客に向けオープンした.AI_SCAPEにある冷凍庫や電子レンジ,湯煎機,トレーなどはどれも一般の飲食店で使用されているものであり,それらをロボットが使いこなす必要がある.ロボットが人の手を借りずに使うと,どのようなトラブルが起きたり,課題が浮かび上がってくるのかを確認し,改善するために,この実証実験の場が設置されている.図8に示すように,AI_SCAPEで一般の利用客にロボットの料理や配膳を楽しんでもらえれば,ロボットをより身近に感じて愛着を持ってもらえ,広い分野でロボット普及の促進につながっていくことが期待される.

図7に示すように,AI_SCAPEに隣接して設けられているのが,共同利用施設「YouComeLab」である.AI_SCAPEは一般の利用客を対象とした施設であるが,YouComeLabはスタートアップやアカデミアを対象とする施設であり,川崎重工のロボット技術を多くの企業関係者や研究者に知ってもらい,そして実証実験の場にもしてもらうのが開設のねらいである.これまでもロボット向けのソフトウェア開発のためにハードウェアであるロボットの貸し出しは行ってきたが,YouComeLabをベースにしてソフトウェアや関連技術の開発だけでなく,スタートアップや研究開発機関等が開発したプログラムを実証することができる.
図9に示すように,YouComeLabはオープンイノベーションの拠点として多くの方が先端技術やアイディアを持ち寄ることで,ロボット製造が盛んな日本ならではの新事業が創出され,多くの社会課題の解決につながることを期待している.また,開発利用や実証実験の場にとどまらず,ロボットを知らなかった人がロボットを学び,ビジネスマッチングにもつながる場となることを期待している.

「AI_SCAPE」にしても「YouComeLab」にしても,あえて完成していない,まだこれだけしかできないという状態を一般の利用客にも企業にも見せている.それは技術者にとってはとても覚悟のいることであり,厳しい評価にさらされることもあるが,それこそがロボットの進化には必要なことである.従来の日本のロボット産業では,開発の現場と使う現場が一体ではなかった.Future Lab HANEDAは,両者が一体となる施設であり,これによりロボットの導入が進んでいない分野で,ロボット利用が促されることを期待している.
さらなるイノベーションを創出するには,それぞれの長所を活かした仲間が水平的につながる必要があり,これまで蓄積されてきた産業用ロボットの技術に加えて,研究機関,異業種,スタートアップ企業,個人が有するアイディアやノウハウが集い,さらにはFuture Lab HANEDAならではの「利用者の声」を聞いて改善していくことにより,イノベーションが加速され,社会課題の解決に向けたロボットイノベーションの拠点になることを期待している.
2.2 AI_SCAPEで体験できること
AI_SCAPEは通常のレストランとして営業している.大半がロボットによる調理や配膳を体験するために来られる一般の利用客で,ランチ帯は満席になることもしばしばである.
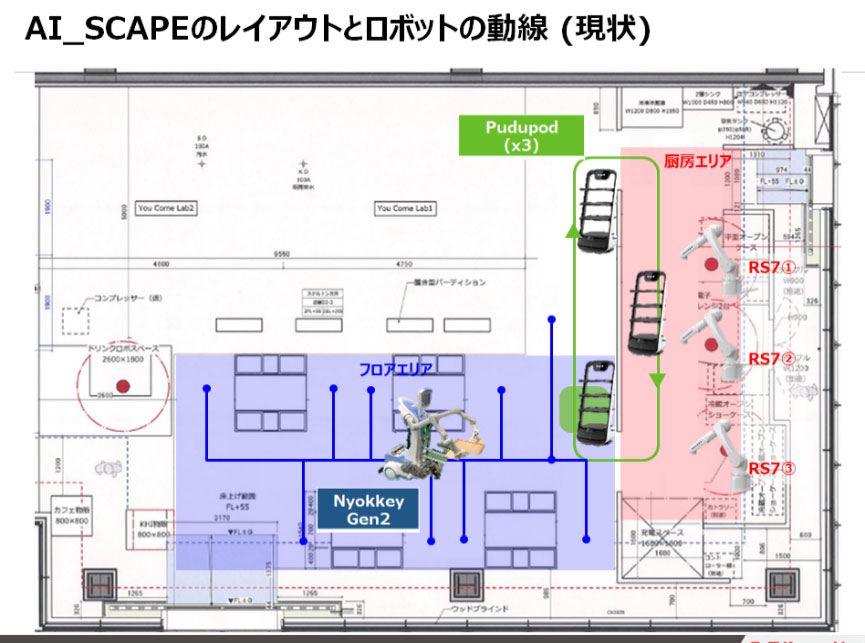
図10に示すように,AI_SCAPEでは,厨房での調理工程を汎用小型ロボットにRS007L,配膳や下げ膳にNyokkey,ドリンクサーバにduAro2の3種類の川崎重工製ロボットが稼働している.それ以外に,厨房内とNyokkeyをつなぐベルトコンベアの役割を他社製の配膳ロボットが努めている[11],[13].
利用客は,着席後テーブルの端にある2次元コードをスマートフォンでスキャンし,注文画面に進む.ロボットによる配膳作業をスムーズにするため,テーブル状にメニューは無く,すべて画面上で確認できるようになっており,注文からクレジットカードなどを用いた電子決済まで,すべて端末上で完結する.
注文が完了すると同時に,厨房内のロボットが加熱調理を開始する.図11に示す,3台のRS007Lはそれぞれ,ごはん・パン・パスタなどの主食の紙容器の加熱,カレー・ミートソース・スープのパウチを湯煎と開封・注ぎ,冷蔵サラダとカトラリー(箸,スプーン)の取り出しを担当しており,それらを配膳ロボット上のトレイに設置する.特に湯煎の工程は,不定形で湯煎後の水分が付着する市販サイズのパウチを扱う点で難易度が高く,把持を確実に行いつつこぼさずに注ぎきるための調整を重ねている.

3台のロボットから食材を受け取った配膳ロボットは厨房を出て,定位置で停止し,図12に示すウェイタのNyokkeyを待つ.配膳ロボットが席に向かうのではなく,Nyokkeyによるテーブル上への配膳を行うためである.Nyokkeyは配膳ロボットにアプローチし,トレイを把持すると各テーブルへ移動を開始する.自走式のロボットは停止位置のずれが発生する可能性があるため,配膳ロボット下部にARマーカーを配置することでNyokkeyがアプローチする際に修正できるようにしている.テーブルへ近づくとNyokkeyは一度停止し配膳を開始するアナウンスを行う.テーブル上に配膳動作に干渉する物があれば移動していただくなどの注意喚起を含めている.テーブルにアプローチした後はアームでトレイを卓上に設置して完了となる.

ドリンクは利用客の好きなタイミングでドリンクサーバロボットから受け取れるシステムになっている.注文が完了した端末に届く二次元コードをドリンクサーバロボットに読み込ませると,図13に示す,双腕スカラロボットのduAro2がカップをセットしディスペンサーからドリンクを注いで取り出し口に設置する.二次元コードを再度スキャンすると扉が開き,カップを取り出せる.

3.Future Lab HANEDAでの活動の事例
グランドオープン以来,ロボットレストラン「AI_SCAPE」の運営を続けている.その中で,多くの改善活動を行ってきており,本章ではその一部の紹介を行う.
3.1 ロボットフレンドリーな空間の整備
AI_SCAPEの什器は,近未来的な空間をイメージさせながらも,自律移動ロボットが移動する際のアルゴリズムを念頭にデザインされている.たとえば,テーブルと椅子は一体型にし,位置関係が変わらないようにした.さらに椅子の下に荷物を置くスペースを設け,ロボットが通行するルートに荷物が置かれないようなデザインとなっている.
什器の色や素材は,Nyokkeyの自律移動に使用するセンサに影響を与えるものではあるが,空間の印象を決める要素でもあるため,できる限りデザイナーの要望に応えるべく,事前にNyokkeyを使った検証を行っていた.しかし,検証したラボとは異なり,AI_SCAPEは広い窓から外光が入り込み,時々刻々と変わる外部環境により,Nyokkeyの移動がままならないことが生じた.そのため,図14に示すような反射シートやARマーカーの追加を行っている.その他,可動式のパーテーション,ゴミ箱,物販棚など,位置の定まっていなかった什器類の所定位置を定め,Nyokkeyの自己位置推定がしやすい環境を整えていった.

3.2 配膳動作の改善
オープニング当初から行っている「配膳」作業についても改善を行ってきた.オープニング直後,多くの利用客がロボットレストランの体験に来られた.Nyokkeyによる配膳を楽しんでいただけていると感じる一方で,個人によっては,配膳されるときにロボットから距離を取ろうとのけ反るような動きをしていたのに気づいた.これは,初めてNyokkeyの配膳を見る人にとって,アームの動きが予想できない状況で,アームが近くに迫ってくる動きをしていたからだと気づいた.
そこで「人に違和感/恐怖心を与えない配膳動作」を実現するために,3つ対策を実施した.
- ① テーブルへのアプローチ方法の変更
図15に示すように従来のNyokkeyのテーブルへのアプローチルートは利用客の真横を通っていた.背後からNyokkeyが迫る席では恐怖心を与える可能性があるため,できるだけテーブルから距離を取るアプローチルートにした.
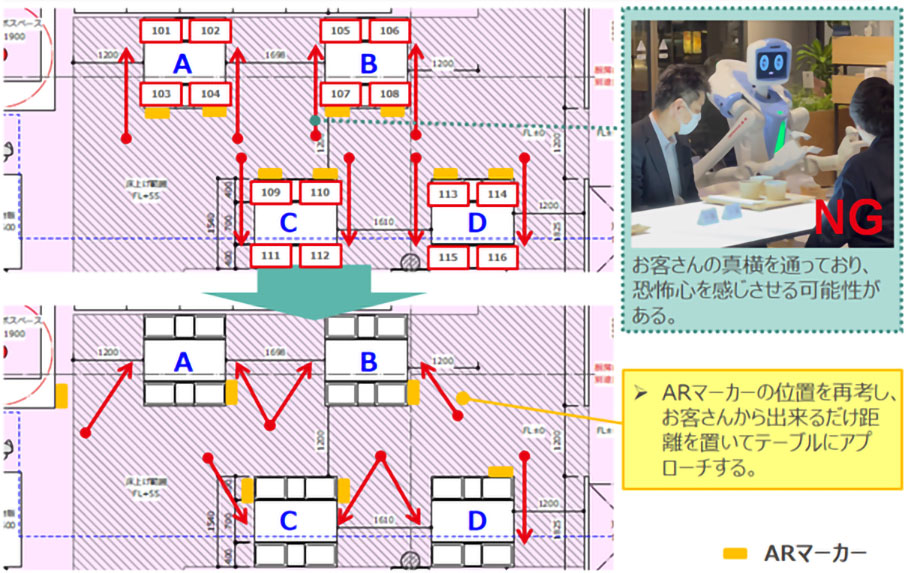
図15 利用客の真横を通らないアプローチルート - ② 配膳時の台車のポジション取り,アーム動作の変更
図16に示すように配膳するときのポジションが,利用客の背後だと,死角から急にアームが現れる状態になり,恐怖心を与える可能性があるため,配膳対象の席とその向かいの席の利用客にアームの動きが見えるように変更した.
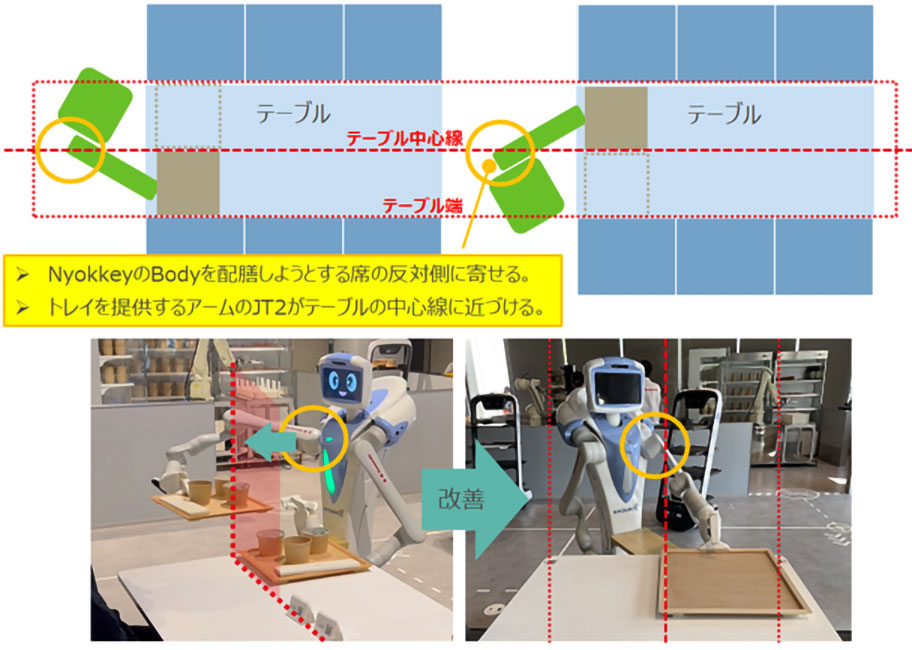
図16 利用客の背後をとらないようなポジション取り - ③ 動作開始時の音声出し・首振り
ロボットが動き出したり,止まったりするタイミングは,人が同じ作業をするときのタイミングとは異なる場合がある.Nyokkeyが動き出すタイミングで声を出したり,動く方向に首を振ることにより,周囲にNyokkeyがこれから何をしようとしているか分かるようにした.
3.3 店舗スタッフが扱うための取り組み
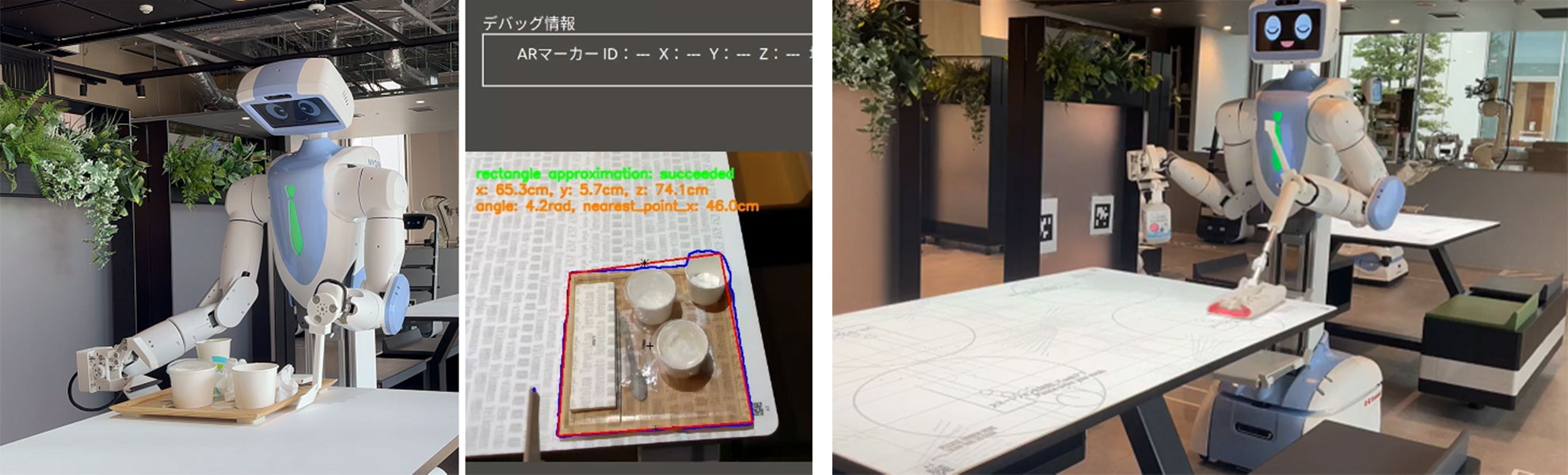
AI_SCAPEで営業を続ける傍ら,YouComeLabでは,図17に示すように,下げ膳やテーブル清掃・消毒といった画像認識などのAI技術を使ったアプリケーションの開発を進めており,AI_SCAPEへの試験導入も進んでいる.
営業中に見せることができるアプリケーションが増える一方で,エンジニアではない店舗スタッフによる操作が難しいという課題が出てきた.
当初,店舗スタッフへは,Nyokkeyをはじめとした同僚となるロボットの作業動作のフローや注意点をレクチャーしていたが,実際に社会実装を目指すのであれば,「店舗スタッフがロボットの状態を把握し,状況に応じて扱えるようにしなければならない」という課題が明らかになった.
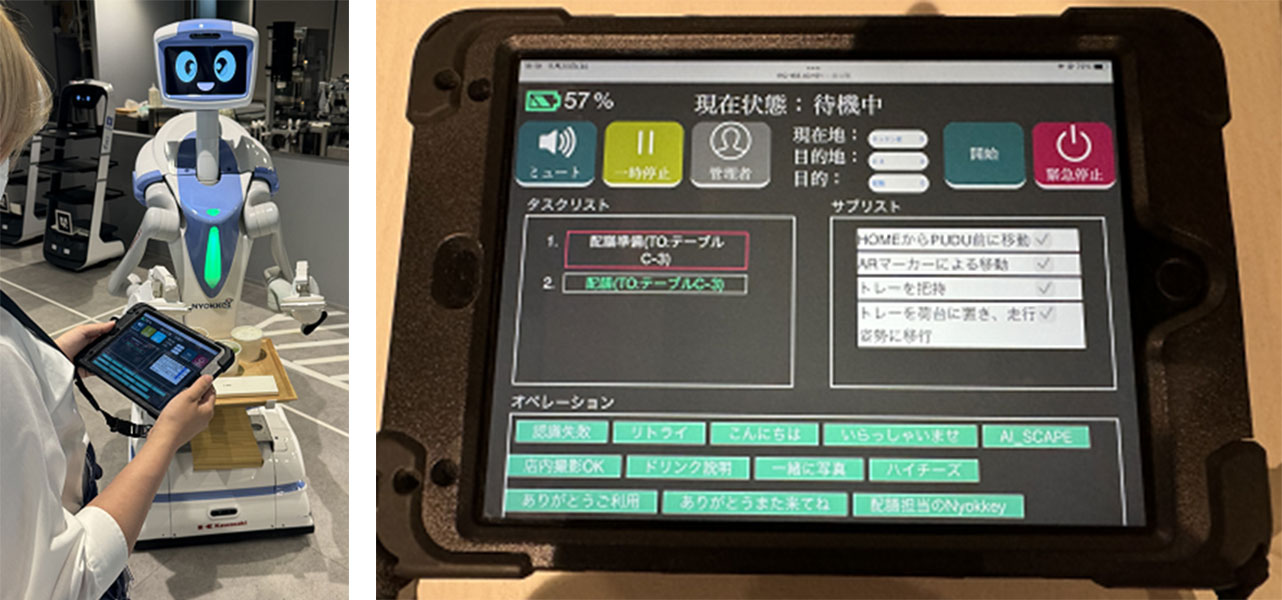
そこで,図18に示すような,店舗スタッフがNyokkeyの実行しているタスクやその進捗をタブレットで確認できるGUIの開発を行った.
4.Future Lab HANEDAでの取り組みを踏まえた今後の課題
サービスロボットの社会実装の状況として2,3章でFuture Lab HANEDAでの取り組みを紹介した.産業用ロボット,サービスロボットのそれぞれの特徴を活かしたレストラン運用を提案し,技術的な課題,運営上の課題などを踏まえて改善活動を進めている.その活動の中で,従業員,お客様の安全,安心にかかわる改善活動について整理し今後の課題について本章で述べる.
4.1 安全・安心の課題 ISO 31101のトレーシング
サービスロボットの普及には,ロボットだけでなく,人とロボットが共存し,協働,協調できる技術が前提となることが予想される[6].従来の機械安全では機械だけで安全を確保し,不確実な人の行動に依存しないことを原則としてきた.一方,近年,人機械協調安全の考え方が提唱され,人がより安全な行動をとることで人と機械とが連携し協調する際の安全がより一層確保され,またその方法について情報技術やAI,センサなどを駆使した実現があり得るのではないかということで議論が始まっている[14], [15], [16].
2023年11月10日に日本が主導してサービスロボットの安全運用マネジメントに関する国際規格(ISO 31101)が正式に発行された.産業用ロボットの規格体系が欧米の規格をベースとして進化してきたことに対して,本規格は日本のJIS Y1001がベースとなり,国際規格化を日本サイドが主導して制定されており日本発信の規格と位置づけられる.安全性の高いロボットサービスの導入が促進され,これを維持,管理できる仕組みを世界へ日本から発信できることが期待されている.実現に向けてのサービスロボティクスの技術とライフサイクルを通した維持管理の仕組みの提供が労働力不足の解消の一助となることが期待されている.ISO 31101では,サービス事業者がロボットサービスを提供する際に必要となる安全運用マネジメントの基本的な内容を示し,特に,ロボットに対する知識が十分ではない不特定多数の人を対象に,いかに安全性を確保するかがポイントとなることが指摘されている[17].
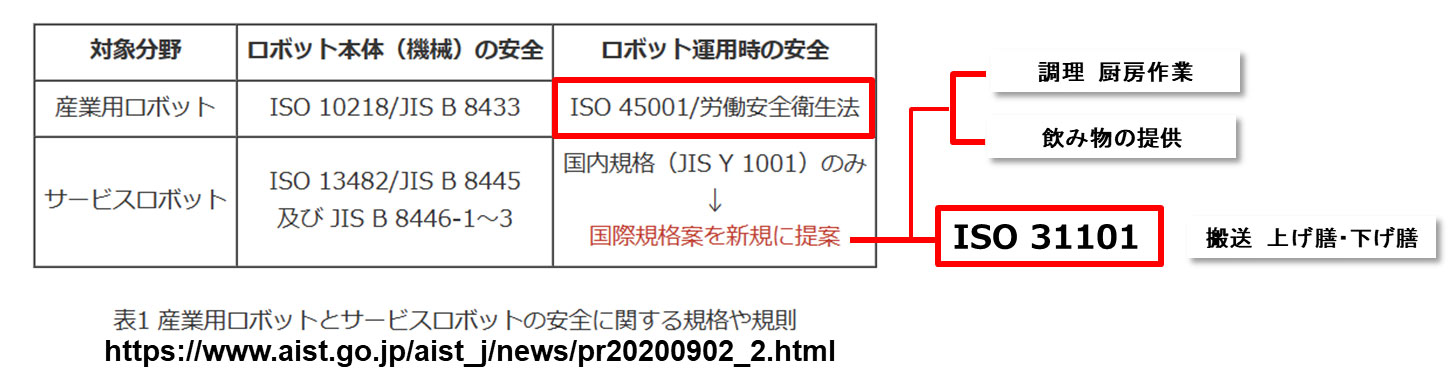
このような課題を解決するため,川崎重工ではサービスロボットの導入を医療機関連携として藤田医科大学と実施している[8].またレストランなどのサービス領域では羽田イノベーションシティで,その社会実証をスタートさせたことを2,3章で紹介した.図19に対象分野として産業用ロボットとサービスロボットの規格体系をロボット本体(機械)の安全とロボットの運用時の安全に整理し[18],Future Lab HANEDAで実施しているレストランサービス内容を加筆したものを示す.
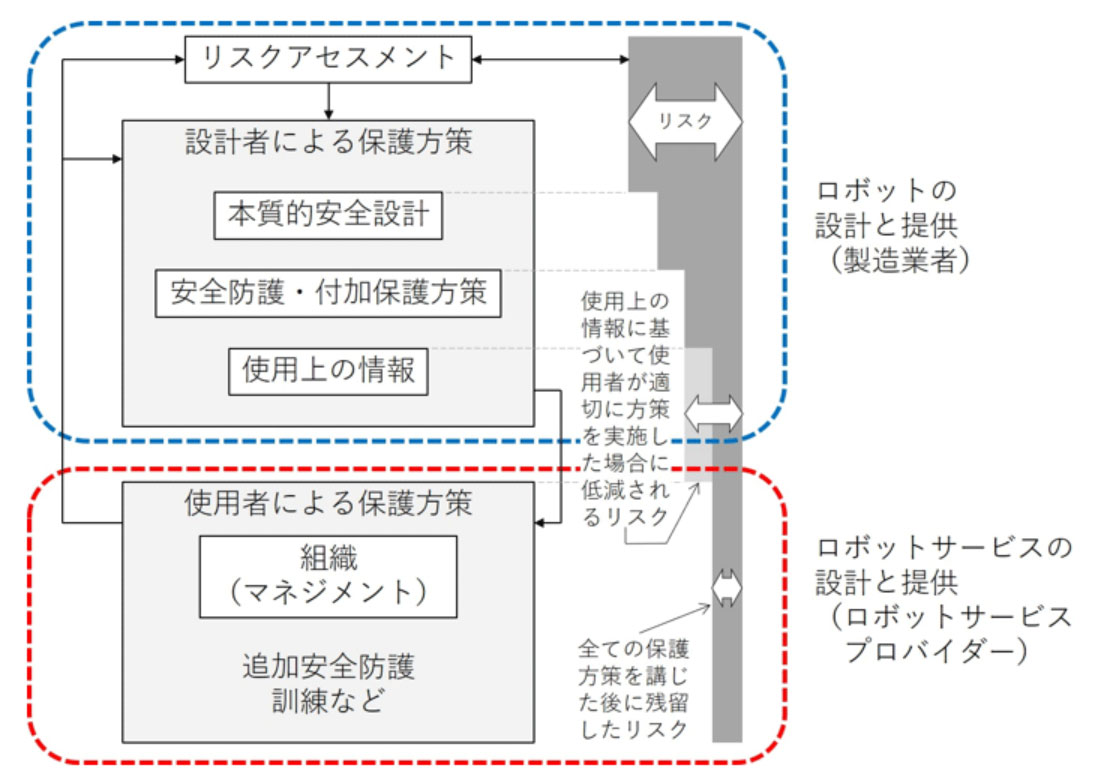
安全マネジメントの内容としては,サービスロボットの安全規格ISO 13482などで示されるロボット自体の安全性は確保されていることを前提として,ロボットサービスプロバイダーがそれぞれに行う個別のロボットサービス特有の安全上の課題や問題について,リスクアセスメントによって明らかにし,安全管理などで運用時のリスクを低減するものとなっている.また品質マネジメント規格ISO 9001や労働安全マネジメント規格ISO 45001と同様の,トップマネジメントや体制構築,教育などの安全管理活動の継続的な実施と改善を求めている.この内容を図20に示す[17].
4.2 人とのインタラクション
Future Lab HANEDAのロボットにおける,人とのインタラクションとして,作業用ロボットは厨房やドリンクコーナでは,機械的もしくは電気的な隔離を行っている.運搬,配膳ロボットとお客様とのインタラクションが主な課題となることが予想される.配膳時は安全管理教育を受けた店舗スタッフがお客様の動きや行動を予測しながら安全監視を行う.店舗スタッフの操作性の向上の観点から装着可能で,安心してロボットの停止処理できる仕組みとデバイスの導入が望まれていた.この要望に対応する考え方としてSafety 2.0の思想[19],[20]がマッチすると考えている.Safety 2.0対応機器としてIDEC社製から提供されているアシストシステム[21]を活用し,利用者が負担感なくロボットをプログラム停止する仕組みを考案し,Future Lab HANEDAの運用へ適用,社会的実証を行った.Future Lab HANEDAのロボット群の中で,まずは厨房で調理作業を行っているロボットに適用した状況を図21に示す.接客中に店舗スタッフが異常状態,または異常となる兆候に気づいた場合,速やかにロボットを停止させたい潜在的ニーズがあり,その復旧作業えを考えた場合,非常停止ではなくプログラム停止の方が利便性の面が高いこと,また「いつもと違う状況を感じたときに躊躇なく誰もが止められる」仕組みへの要望が店舗スタッフのアンケート結果から得られていた.そこで,安心停止という概念を形成し,その有効性を検証することとした.その詳細を次節以降で記述する.

4.3 生産性との両立~安心停止
近年,進展著しい情報技術や生成系AI,各種安全センサなどを活用し,人と機械とが空間を共有して,ともに同じ目的で共同し,作業を行う人機械協調安全が注目されている[22],[23],[5].その際,人と機械の協調においてヒューマンインザループが一般的な構造であり,それによりシステムの設計で人の安全な行動をどのように実現するかは大きな課題となっていて,その1つの対応手法として行動分析学がある.行動分析学では,これまでの機械安全の枠組みで求められてきた「使用上の情報」の単なる提示や,一般的な安全教育,訓練などでは不十分であって,人が正しい行動,安全な行動をとり,不安全な行動をとらないためには,先行刺激となる環境,また実際に人が行動する際の随伴性をコントロールすることが重要だとしている[24],[25].非常停止機能においては,停止すれば安全であるなら,停止機能をより一層使うことを促進し,停止させることが利用者にとって不利益をもたらさないような環境や機器の設定,システムのデザインが重要だということになる.今回の安心停止スイッチは,これを提案するものである.
採用した安心停止を非常停止と比較して,人の行動心理の側面から考察した[26].人の行動を確定性と利益の側面で整理した場合,非常停止の場合は不利益となることが予想され,ボタンを押すことに躊躇する傾向がある.誰もが気づいたときに躊躇なく停止をかけられて,そのあとの処置に対しても不利益とならない仕組みを検討した.図22に非常停止スイッチの行動モデルの仮設を示す.
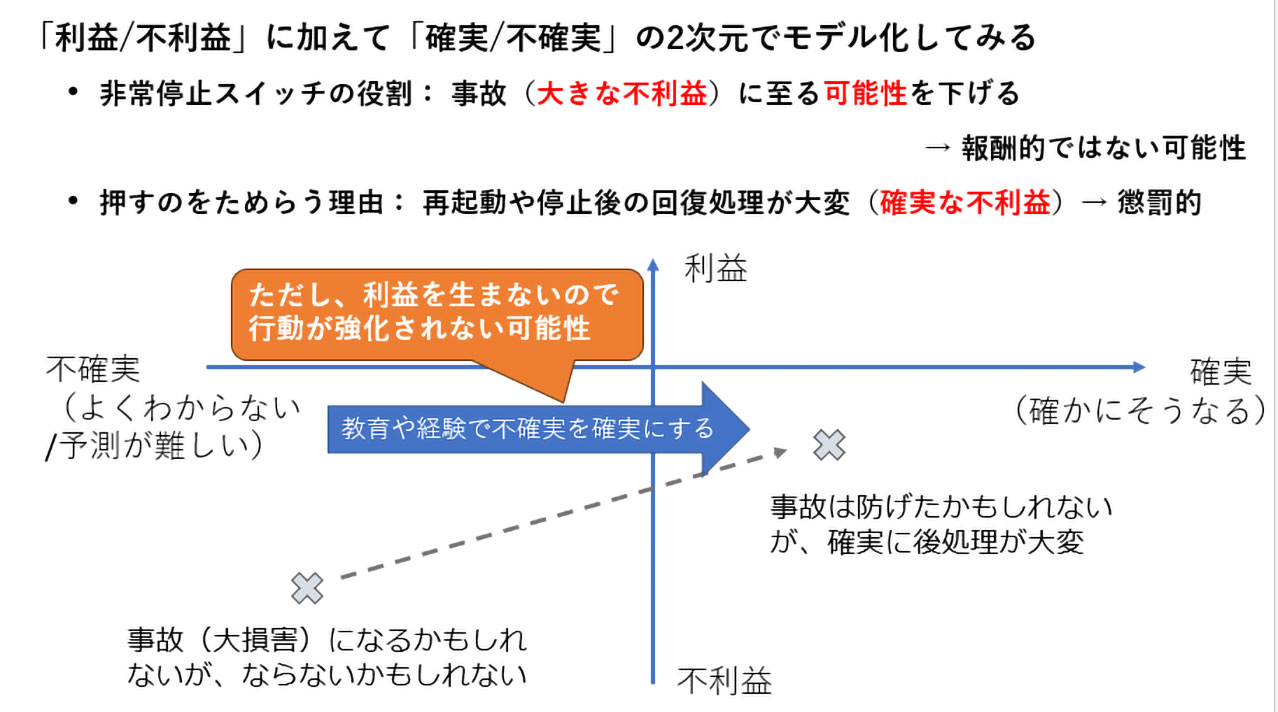
非常停止スイッチの役割としては事故(大きな不利益)に至る可能性を下げることにその存在意義は高いものの,急峻な停止に伴う背反事象が残るケースがある.具体的には復帰手順の複雑化や多様な止まり方に対する復旧手順の詳細化などがあげられる.この点において,非常停止の意味は高いものではあるが,一方で報酬的ではない可能性も残される.また,利用者は上記の非常停止後の対応を予想し,押すのをためらうケースもあることが店舗スタッフの意見として存在していた.再起動や非常停止後の回復処理が大変という声は,店舗スタッフの視点からすると確実な不利益とも解釈でき,懲罰的な感覚を持つことが懸念された.こうした利用者にとって不利益となる行動は,負の学習効果となって行動が抑制されてしまう可能性が高い.すなわち,経験を通じて,危険を感じても停止スイッチを押さないという不安全な方向の学習が進んでしまうことが懸念される.これは実際の経験に基づくものなので一般的な安全教育や学習では解消することが困難であることが予想され,安心停止スイッチを提案するものである.
実際に,安心停止スイッチを現場で利用した結果についての確認を行った.レストランで稼働している各種ロボット(人共存エリアで稼働するサービスロボットや,立ち入り禁止エリアで稼働する産業用ロボット)には,前述の定義に従って設計された安心停止スイッチが実装されている.またリスクアセスメントの結果に基づいた,従来の機械安全に従った非常停止スイッチも合わせて実装されている.これにより,ロボットの利用者である複数のレストランの店舗スタッフが,非常停止スイッチと安心停止スイッチのそれぞれいずれか,もしくは両方を利用した際の経験や結果をアンケート等で収集し比較することができる.今回2名の結果を収集し,それらの行動の結果を,安全行動デザイン図[27]を用いて図23に示した.
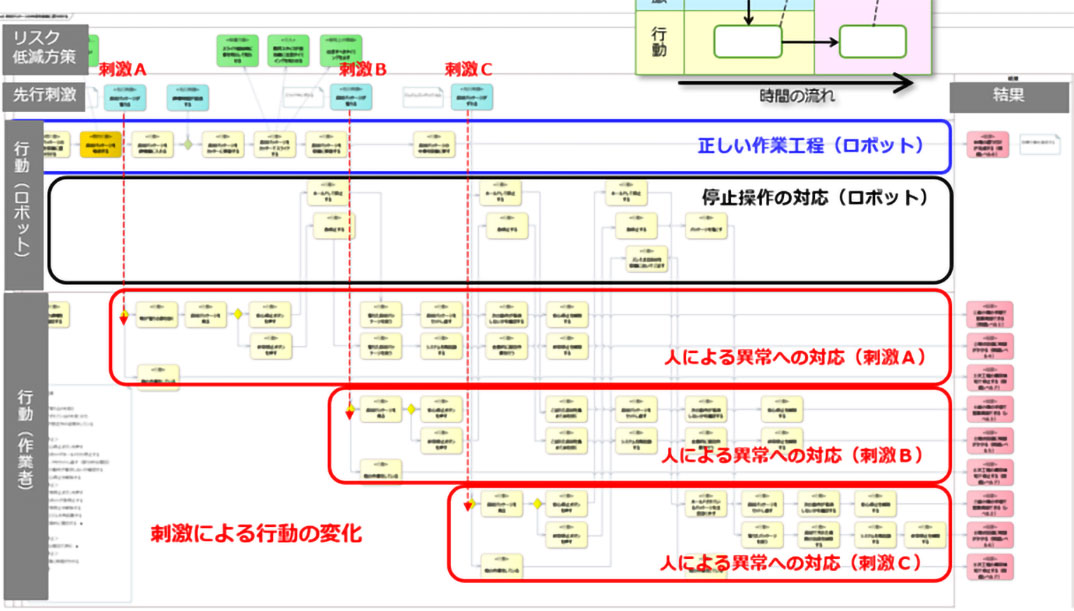
図23の最上段は行動分析学の先行刺激を示している.また最下段には店舗スタッフの行動が記載され,分岐で場合わけを記載している.調理用のロボットの異常に気付いて非常停止をかける場合は,作業者が非常停止スイッチの場所にかけつけてボタンを押す必要があり,またロボットが急停止することで同様にダメージが大きい可能性がある.また,パッケージがずれているかどうかがはっきりしない場合も,本当にずれていてそのままだと損害が発生すると分かるまでは止めないという判断をすることも想定される.
今回提案した安心停止スイッチを押す場合は,遠隔で一時停止できるので,躊躇せずに気楽にすぐに停止して状況を確認することができる.実際にずれがあった場合も,一時停止のまま具材を落とす恐れがなく対処できるように設計されているので,食材を無駄にすることもない.よって安心停止スイッチを押すことで良い結果のみを得られ,次回も何かあればすぐにスイッチを押そうという学習がなされる.安心停止スイッチの効果のモデル化として,アンケートで確認した安心停止スイッチの効果,および非常停止スイッチとの比較について,図24にモデル化して示す.
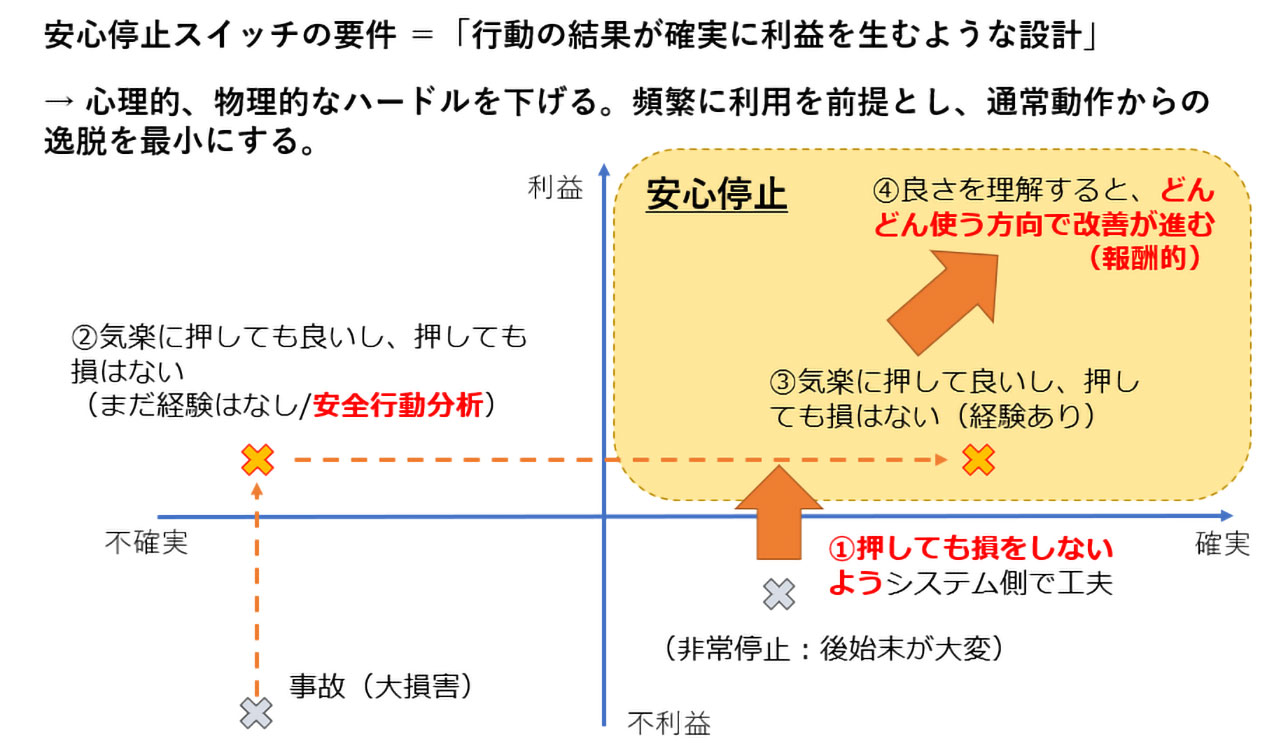
図24は4象限に分かれており,利用者にとって,左は不確実なこと,右は確実なことを示す.また上は利益になること,下は不利益になることを示している.安心停止については,運用や物的損害が最小限もしくは,ほぼないように設計,実装される.押したことがない場合は不確実さがあり,第1象限に位置することになるが,実際に安心停止をさせてみることで良かった結果が残ると,より頻繁に押すという行動の変容が促される(第2象限).これにより,押さないことによる危険を回避し,運用の際の安全性が一層増すことが可能になる.
4.4 デジタルプラットフォーム(情報・通信)との連携とその可能性
Future Lab HANEDAでは人を中心とした,より使いやすいサービスロボットの技術,仕組みを社会実装していることを紹介した.ロボティクスの進化と社会定着とあわせて重要と位置づけられることは情報・通信と連携したロボティクスの高度化があげられる.そこを支える基盤としてデジタルプラットフォーム(情報・通信)が重要な位置づけとなり,その連携と可能性が今後の取り組みに重要になると推察される.図25に示すように,川崎重工はマイクロソフト社と連携しMicrosoft Azureを基盤としたプラットフォームを構築している.この上に鉄道,建設機械,ロボット,オートバイ,船舶,水素をはじめとするプラントなどの事業が活用を推進している.羽田イノベーションシティでは,このような情報基盤とロボティクスの実証が今後加速されることが期待される[28].人協調ロボティクスの基盤技術を活用し,人々が日常多くの時間を過ごしている住宅やビル(集合住宅,オフィスビル等),商業施設,病院等を対象とした人協調ロボティクスの社会実装の成果が期待される.人協調ロボティクスの導入促進ツールの整備やロボットフレンドリーな環境の構築を推進し,労働人口減少対策,高齢者・障がい者の生活の質向上,子育て世代の可処分時間の延伸などへの貢献が期待される.
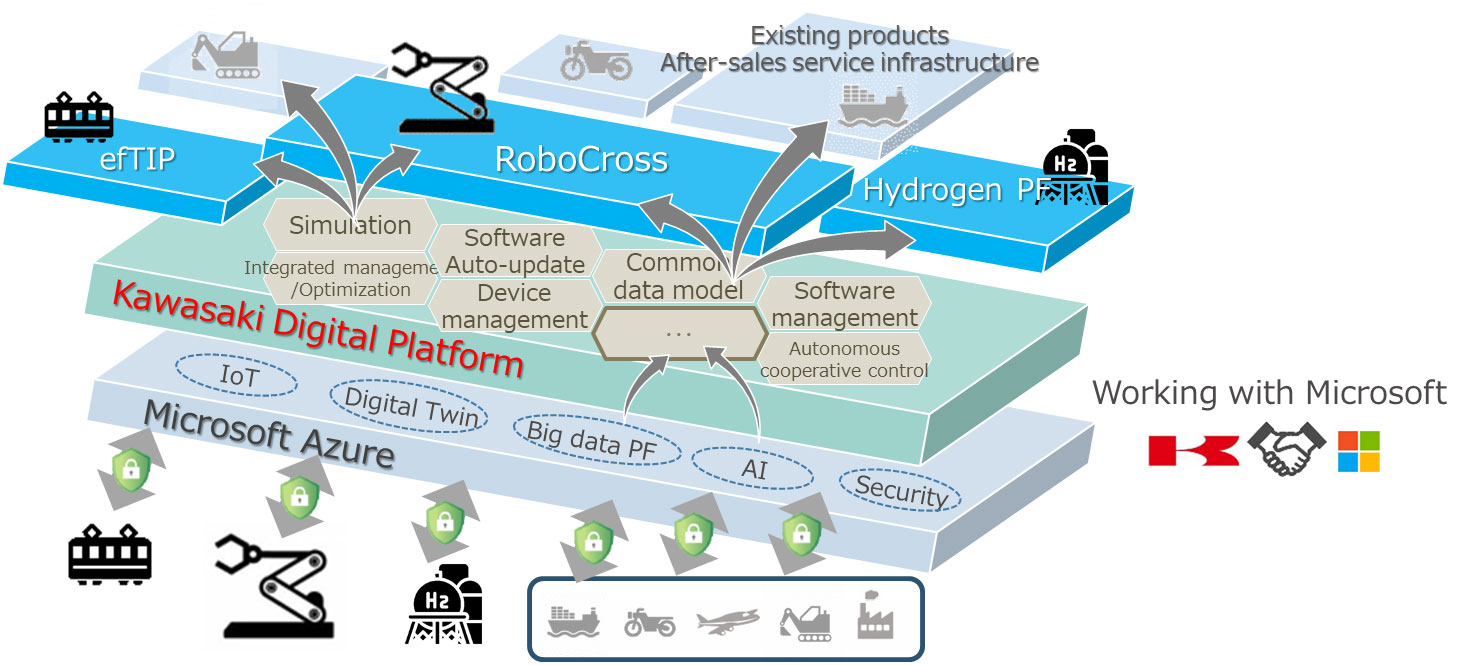
ロボティクスに着眼すると,よりロボットの社会展開を支えるデジタル基盤づくりも必要になることが容易に予想される.特に多くの種類のロボットの活用とそれぞれのロボットの相互連携,ロボットのシステムインテグレータとの連携や共創が必要となる.また,産業用ロボットとサービスロボットをまたがる領域の取り組みも加速されることが予想される.このような活動を支える仕組みつくりは,まさに黎明期であり今後の技術展開が大いに期待される.川崎重工は図25で示したデジタルプラットフォーム上にロボティクスに対応したオープンなロボット用のデジタルプラットフォームを提案している[29].2023国際ロボット展(iREX2023)[30]ではその具体的なコンテンツの展示を行い,今後の永続的な社会課題解決に向けた活動を進める予定である.
参考文献
- 1)川崎重工業(株):グループビジョン2030・進捗報告会,2023年,https://www.khi.co.jp/ir/library/other_presen_210601.html,https://www.khi.co.jp/ir/pdf/etc_231212-1j.pdf
- 2)川崎重工業(株):研究開発,熟練技術者の動きを再現し,技能を伝承する新ロボットシステム「Successor」,https://www.khi.co.jp/rd/technologies/robot/robota.html
- 3)リモートロボティクス(株):人とロボット.これからはたらくをもっと,https://www.remoterobotics.net/
- 4)NEDO:公募,「戦略的イノベーション創造プログラム(SIP)第3期/人協調型ロボティクスの拡大に向けた基盤技術・ルールの整備」に係る公募について ,https://www.nedo.go.jp/koubo/CD2_100342.html
- 5)国立研究開発法人 産業技術総合研究所:生産性の持続的向上と人の負担軽減を両立するデジタルツインを開発,https://www.aist.go.jp/aist_j/press_release/pr2023/pr20230131/pr20230131.html
- 6)吹田和嗣:自動車製造分野における人を中心としたロボットとの協働・協調化の取り組み, 日本ロボット学会誌,Vol.40, No.7, pp.593-596 (2022).
- 7)川崎重工業(株):自動PCR検査ロボットシステム,https://www.khi.co.jp/groupvision2030/pcr/
- 8)メディカロイド:https://www.medicaroid.com/top.html
- 9)川崎重工業(株):ANSWERS(アンサーズ),つぎの社会に向かうKawasakiのこたえ,ロボットでスマートホスピタルの実現へ.藤田医科大学×川崎重工の挑戦,https://answers.khi.co.jp/ja/connected-society/20220810j-01/
- 10)川崎重工業(株):プレスリリース,遠隔操作グラインダーロボットシステム「Successor-G®」を初納入,https://www.khi.co.jp/pressrelease/detail/20231005_1.html
- 11)川崎重工業(株):ANSWERS(アンサーズ),つぎの社会に向かうKawasakiのこたえ,人とロボットの共生に進化を.「Future Lab HANEDA」の挑戦,https://answers.khi.co.jp/ja/connected-society/20220527j-01/
- 12)川崎重工の産業用ロボット:オープンイノベーション施設「Future Lab HANEDA」開所,https://kawasakirobotics.com/jp/news/future-lab-haneda-open/
- 13)Kawasaki Group Channel:ANSWERS:Future Lab HANEDA オープン - YouTube,https://www.youtube.com/watch?v=jV5ni3h7Z7Y
- 14)中坊:デジタルツインと安全,日本ロボット学会誌,Vol.40, No.7, pp.585-588.
- 15)(一社)セーフティグローバル推進機構:実践!ウェルビーイング,日経BP社.
- 16)北條:人間-機械の協調作業下においてロボット教示に用いる3ポジションイネーブルスイッチが作業者のウェルビーイングに及ぼす効果,ビジョンゼロ・サミット・ジャパン (2022).
- 17)経済産業省:日本発のサービスロボットの安全な運用に関する国際規格が発行されました~労働力不足を解消するサービスロボットの安全・安心な利用を目指して (ISO 31101), 経済産業省産業技術環境局 国際標準課,製造産業局 産業機械課,https://www.meti.go.jp/press/2023/11/20231113001/20231113001.html
- 18)国立研究開発法人 産業技術総合研究所:産総研ニュース,ロボットサービスの安全に関する国際規格案の審議が開始─サービスロボットの産業競争力を強化─,https://www.aist.go.jp/aist_j/news/announce/pr20200902_2.html
- 19)経済産業省:METI Journal ONLINE,IoT時代の安全概念「Safety2.0」の世界観,https://journal.meti.go.jp/p/8612/
- 20)(一社)セーフティグローバル推進機構:協調安全,https://institute-gsafety.com/safety2/
- 21)IDEC(株):Collaborative Robots,日本,https://jp.idec.com/idec-jp/ja/JPY/solutions/collaborative_robots
- 22)Maruyama, T., Ueshiba, T., Tada, M., Toda, H., Endo, Y., Domae, Y., Nakabo, Y., Mori, T. and Suita, K. : Digital Twin-driven Human Robot Collaboration Using a Digital Human, Sensors, Vol.21, 8266 (2021).
- 23)多田,遠藤,丸山:ヒューマンデジタルツインの現状と将来展望,日本ロボット学会誌,Vol.40, No.7, pp.579-584.
- 24)北條,穴田,是村,中坊,清水:行動分析学を応用した因果ループ図におけるリスク分散法の提案,第23回計測自動制御学会システムインテグレーション部門講演会 (SI2022).
- 25)中坊,穴田,是村,北條:介護ロボット導入プロセスを可視化する因果ループ図と行動分析学に基づく検証,第21回日本生活支援工学会大会・日本機械学会福祉工学シンポジウム2022・第37回ライフサポート学会大会 (LIFE2022).
- 26)中坊嘉宏, 吹田和嗣, 穴田啓樹:行動分析に基づいた安心停止スイッチの要件の提案, 第41回日本ロボット学会学術講演会, 3F2 OS16 : 人・ロボット協調による『合業』 型生産システム (2023), https://www.youtube.com/watch?v=MO26nCUBmO0&t=15585s
- 27)穴田,是村,清水,中坊,北條:開発の早期から人の不安全行動を考慮するための安全行動デザインの表記法と設計プロセスの提案,第23回計測自動制御学会システムインテグレーション部門講演会 (SI2022).
- 28)セックSIP:セック,「戦略的イノベーション創造プログラム(SIP)第3期/人協調型ロボティクスの拡大に向けた基盤技術・ルールの整備」(NEDO公募事業)の委託先に採択,https://prtimes.jp/main/html/rd/p/000000013.000096605.html
- 29)RoboCross:ROBO CROSS,川崎重工の産業用ロボット,https://kawasakirobotics.com/jp/blog/story_18/
- 30)2023国際ロボット展 (iREX2023) , https://irex.nikkan.co.jp/

久保 仁
kubo_hi@global.kawasaki.com
2004年京都大学大学院情報学研究科修士課程修了.2004年川崎重工業(株)入社.産業用ロボットコントローラのソフトウェア開発に従事. 主に,自動車メーカ向けの機能開発を担当. 2017年米国のKawasaki Robotics(USA).Insに赴任.自動車関連顧客を中心に,現地エンジニアのサポートや技術教育に従事.その後,北米における新規市場開拓にも従事.2021年に川崎重工業(株)に帰任し,サービス業界向けのロボットの試作機の開発に従事.現在に至る.日本ロボット学会(正会員).

合田一喜
gouda-krs@global.kawasaki.com
2016年カワサキロボットサービス(株)入社.産業用ロボットの認知向上を目的とした一般層向け展示施設の企画運営,各種イベント,学生向けロボット教育の企画を担当.2021年より川崎重工業(株)出向,Future Lab HANEDA立ち上げと運営を担当.展示会,取材,業界団体と連携した人材育成事業等を通じて対外発信の業務に従事し現在に至る.
吹田和嗣
suita_kazutsugu@global.kawasaki.com
2021年筑波大学理工情報生命学術院博士後期課程修了.博士(工学).1989年トヨタ自動車(株)入社.自動車ボデー生産ラインのロボットシステム,完成車検査ラインの実用化開発と展開に従事.人を中心としたロボットとの共存・協働・協調とモノづくりにつながる産業用ロボットシステムの応用開発と実用化に従事後,2022年退社.同年川崎重工業(株)に入社,ロボットシステムの技術総括業務に従事.ISO/TC299/WG3(産業用ロボット)Expert.日本ロボット学会(正会員).
採録決定:2024年1月29日
編集担当:岩倉友哉((株)富士通研究所)