公道走行可能な自動配送ロボットの実証と実用化に向けた課題
1.物流のラストマイルの変化
リモートワークが定着し,人の移動からモノやサービスが移動する生活スタイルへ世の中が変化しつつある中で,EC(エレクトリックコマース)やQC(クイックコマース)の需要は拡大し,配送ニーズは増大している.また,郊外のニュータウン等では高齢化に伴い買い物困難者が増加しており,日々のスーパーマーケットの購買をWeb経由で行うネットスーパーの利用拡大も見込まれている.一方で,物流業界では2024年問題と呼ばれる配送の担い手不足や過重労働が懸念されている.またQCの配送物を運ぶ自転車の行き交う様子は都市部では一般化したが,労働者の密度が低い郊外では成り立ちにくく,QCのサービス自体が提供されていない.こうした社会課題の解決手段の1つとして,物流のラストマイルの配送に特化した「自動配送ロボット」の早期の実用化が期待されている[1].
「自動配送ロボット」はコロナ禍おいて非接触・非対面を実現するものとして注目を集めるようになったが,以前より検討は進められていた.道路政策の方向性を提案する「2040年,道路の景色が変わる」[2]では,未来社会の道路に溶け込む交通主体としてロボットが描かれ,モノの移動の自動化・無人化や店舗の移動でまちが時々刻々と変化する活用形態が示されている.このように,自動配送ロボットへの大きな期待としては,担い手不足を補う無人化・省人化であるが,夜間配送をロボットが担うことで,配送員の労働環境改善も考えられる.さらに,飲食店からの直送や配送物の集荷・廃棄物回収,移動販売など,配送以外のサービスへの活用も考えられる.
筆者らは「自動配送ロボット」を公道で走行させ,さまざまなサービスの実証実験を複数個所で行ってきた.本稿では実証で得られた技術的な知見等を記し,実用化に向けた課題について述べる.
2.自動配送ロボットを巡る動向
2.1 自動配送ロボットの動向
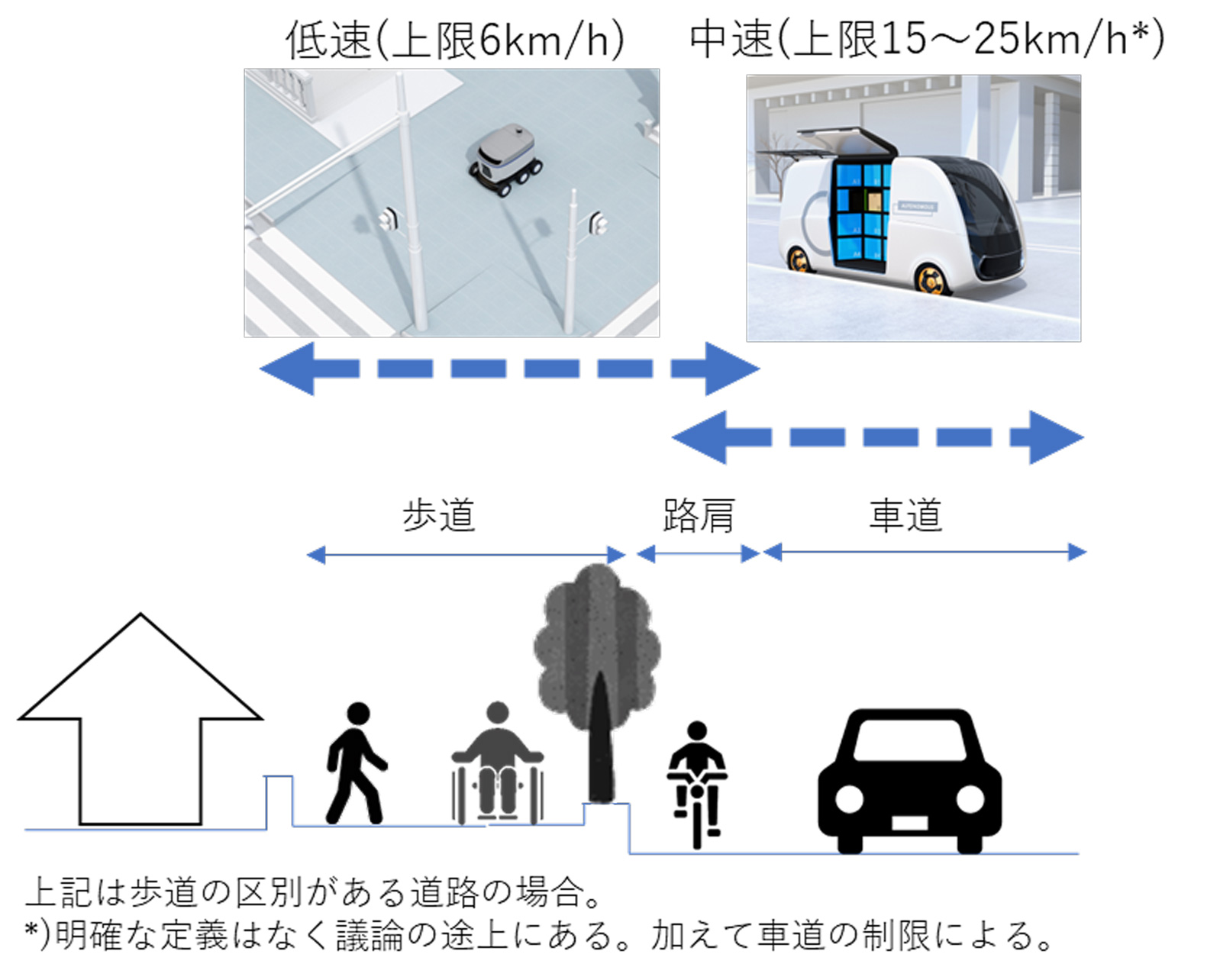
自動配送ロボットの開発は,歩道を走行するモデル(以下,低速小型という)と車道を走行するモデル(以下,中速中型という)に大別される(図1).
自動配送ロボットの規格や分類を定めるものとして,ISOではTC 299,IECではTC 125の議論が該当すると考えられる[3][4].基本的には,道路上の走行位置,速度,大きさ,重さにより,満たすべき安全規格が異なるとの考え方に基づき,現在議論が行われている.
低速小型の自動配送ロボットについては,上限速度が6km/h,歩道と車道の区別のある道路では歩道を,区別のない道路では車道を走行するものとして分類されている.車体の大きさの基準は電動車椅子を参照している.日本では令和4年改正道路交通法で「遠隔操作型小型車」として規定が整備された.
さまざまな用途の実証が行われているが,店舗から個宅へ飲食物を届けるような,個品を2点間で輸送するQCに向いたロボットと考えることができる.
中速中型の自動配送ロボットについては,上限速度が15~25km/h程度で,車道を走行するものとして議論の途上にあるが,低速小型に比べて検討は遅れている.
用途としては,複数の荷物を積載して住宅地を周回するような,宅配便やネットスーパーに向いたロボットと考えることができる.
筆者らは,車道を走行する中速中型の自動配送ロボットに取り組んでいるが,前述の標準化動向も踏まえて今後日本でも検討されるべき分野と考えている.
2.2 自動配送ロボットの事例
海外では,大学の構内などを中心に,低速小型のロボットの開発が行われる一方で,早くから車道を走行する中速中型モデルの実証が行われてきた.2016年設立の米国Nuro社は車道を走行する配送ロボットに長く取り組んでいる(図2).また,中国では,EC大手のJD.com,Alibaba GroupなどがCOVID-19流行前から取り組みを始めている.車道の他に,並行する自転車やオートバイ用の道路を走行させている場合もある.
![図2 Nuro社の自動配送ロボット[5]](DP6505-S02/image/image2.jpg)
3.自動配送ロボットの開発
3.1 自動配送ロボットのコンセプト
筆者らが設定した自動配送ロボットのコンセプトについて述べる.表1に筆者らの取り組んでいる自動配送ロボットと低速小型,軽自動車などとの大きさや速度の違いを示す.
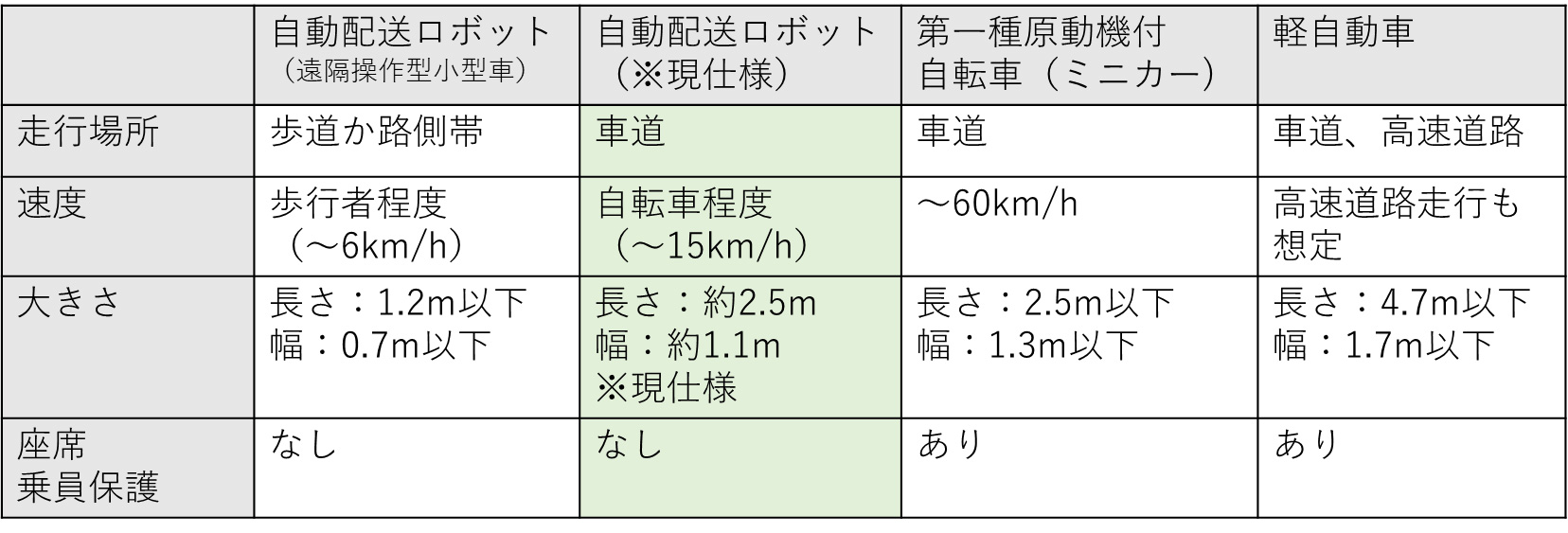
まず,既存規格と比較して,ロボットは無人であることが大きな特徴と考えられる.走行速度に関しては,車道において他車両が追い越しやすい自転車程度の速度(15km/h以下)に設定した.また,車道の中でも事前に設定した限定空間のみを走行させ,環境条件を単純化した.
座席や乗員保護区画がないことは,衝突時の乗員の安全性を考慮しなくてよいことにつながり,簡素な構造が期待される.加えて,乗員のための冷暖房を必要としない点も,エネルギー効率の観点から特徴となる.一般的な車載の暖房の消費電力は2~3kW程度で,ロボットが走行に要する消費電力の数倍にもなる.
その他の仕様は,関係省庁と協議の上でミニカー区分に準拠することとしている.
図3に自動配送ロボットの基本構成を模式図で示す.本自動配送ロボットは,メーカが製造し,筆者らが日本の道路運送車両法,道路交通法に沿うように整備,カスタマイズしている.
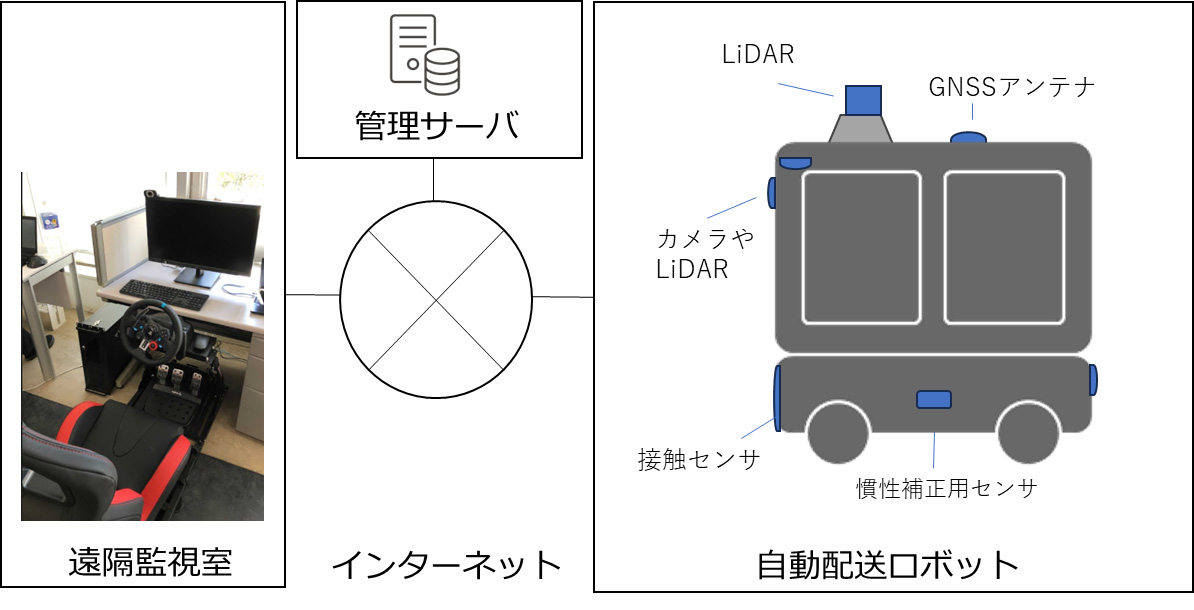
ハードウェアは,主に小型EVに用いられる部品で構成される.具体的には,自動車基準調和世界フォーラムではL6,L7と呼ばれる規格で,EUではL6eやL7eと呼ばれる枠組みがあり,適合する部品等が生産されている.加えて,自動運転用の部品として,LiDAR(Light Detection and Ranging),光学カメラ,GNSS(Global Navigation Satellite System)受信機などを備える.図4に自動配送ロボットの外観を示す.

自動運転用の部品については,遠距離を高速にセンシングできる高価な部品は排し,比較的安価なセンサを装備している.LiDARの性能は,最高級の製品に比べると最大検知距離は約半分,サンプリング数も半分程度の性能である.光学カメラは,解像度が高いほど画像認識の精度や認識距離を向上させることができるが,搭載コンピュータの要求性能や消費電力も高くなる.現状は左右約20mの距離の交差車両を認識できる.これは,生活道路の環境においては安全であるが,制限速度が30km/hを超える環境では,センサとコンピュータの性能を見直す必要がある.
また,近距離の3m以内をカバーするLiDARも装備している.より安価なカメラや超音波センサの方が多数配置しやすいが,カメラは画像認識の計算負荷,超音波センサは誤検知の課題があり,経験則からLiDARを用いている.
3.2 遠隔監視システム
自動配送ロボットは,「遠隔型自動運転」と呼ばれるシステムにより制御される.完全に無人で運行を行うことは事業者の運行責任の観点からも現実的ではなく,ロボットは自律走行を行いながら,常に人間が遠隔から監視を行う.そして,想定外の状況や緊急時に対しては,手動により遠隔操作(介入)を実施する.図5に遠隔監視の様子を示す.複数台の自動配送ロボットの状況を監視できるよう,監視画面を監視者の正面に配置し,センサ情報処理や運行管理などの画面を周囲に配置している.

遠隔監視システムにおいては,無線通信が重要となる.筆者らは,事前に無線や通信品質を測定するとともに,同時監視台数,監視操縦性などのパラメータを限定空間に合わせて個々設計し,安全評価を都度実施している.5Gの活用に期待が寄せられているが,通信方式だけでは解消されない課題も多い.
そこで,冗長安全性を考慮し,通信品質が劣化した場合でも,自動配送ロボットが自動的に減速し待機するアルゴリズムを組み込むことで不測の通信切断等に対処している.
遠隔監視は,ロボットの台数より少人数で運用しなければ経済的メリットが得られない.そのため,主に以下の要素を改良する開発が必要となる.
自律走行の比率(介入頻度や連続走行距離・時間)
遠隔監視・操作の性能
不測の事態が生じた際の安全性
多くの交通シーンを自律走行できれば,介入頻度が低くなり,少ない監視者でより多くの台数を運用できる.また,効果的な遠隔監視・操作が可能になれば,多くのロボットを安全に運行でき,かつ介入操作も最小限の時間で実施できる.さらに通信やIT機器の切断を想定した安全機能や冗長系を用意する必要がある.
筆者らは,後述する実証例において,自律走行の比率の改善を継続して行い,距離換算ではルートのほぼ全域での自律走行を達成している.現在では,自律走行の評価軸を,自律走行できた比率から連続稼働に移している.連続稼働時間・距離が高まれば,信頼性の高い安定した運用が可能になり,経済的な評価を行いやすい.
遠隔監視・操作の改良については,あくまで自律走行を行うことが前提であり,遠隔操作は例外的な用途に限られる.遠隔操作技術に関しては,以前より実証実験が行われているが,検証段階にある技術であり,綿密に設計し実装する必要がある.法制化に関しても,イギリスにて,法律委員会からレポート[6]があった段階であり,当面は例外的な運用とする必要がある.筆者らも遠隔操作の通信技術の改良などを継続して行っているが,どの監視者(運転手)も自律走行に比べ低速でしか走行させることができなかった.推測ではあるが,映像で全景を確認してリスク評価を行う遠隔監視に比べ,映像の中央奥の目的地を注視しロボットを制御する遠隔操作の方が,より高い解像度や短い遅延時間が求められるため,と考えられる.効率の点でも遠隔操作は最小限の時間にする事が必要である.
3.3 自律走行機能
本自動配送ロボットは,事前に作成した電子地図と,センシング結果を照合しながら自己位置を推定し,目標地点までの自動運転を計画する.自己位置の推定は,LiDARとGNSS受信機で取得したデータを慣性計測装置IMU(Inertial Measurement Unit)のデータで補正して行っている.GNSS受信機とIMUを組み合わせた装置が市販されているが,LiDARのデータ処理にもIMUを用いた方が,右左折時に安定した位置推定が可能である.位置推定の精度は,衛星補足数などで変化するが多くの場合で横方向誤差は3cm以下に収まり,走行経路上をロボットはほぼ同じ走り方で周回する.実際には,後述する自動回避機能により,植栽や草を回避しようと反応することが多くあり,横方向の誤差(不安定要因)としては,草の揺れなどの方が問題である.
安全機能としては,接近停止と自動回避の2種類がある.前者機能は,2.8m以内に物体が接近して交錯する可能性がある場合に停止する.後者機能は,他の物体の移動経路を予測し減速停止または回避する.
前者は,自動車の衝突被害軽減ブレーキAEBS(Advanced Emergency Braking System)に相当する機能で,停止して衝突しないことを安全条件とした.特に,周囲に人が接近しやすい自動配送ロボットの特性を考慮し,人を対象とした試験を多く実施している.具体例としては,ジョギング中の人の速さを2m/sとし,車道へ飛び出してくる場合の安全試験などを実施している.
また,後者の自動回避について,道路交通法第18条2項に,どの程度の距離と速度で回避すべきかの安全距離の考え方が記されている.歩行者,自転車,自動車等の違いにより,設定すべき安全距離は異なる.加えて,国内の低速の自動運転車の実証成果を元にしたISO 22737[7]には,低速自動運転のシステム要件やテスト手順,回避停止時の安全距離の基準が示されており,安全試験の設計において参考となる.
その結果,技術的な課題も見出されている.
具体例を以下に示す.
① 自転車との混在交通において自転車側が戸惑いを感じる点
② 速度差がある交差点における左右物体検知
③ さまざまなケースのある駐車車両回避
①について,中速中型ロボットと自転車とは同程度の速度であり,ロボットが自転車を追い抜く,あるいは追い抜かれる交通シーンが想定される.ロボットは路肩近くの左寄りを走行しており,後述する実証例では,車両を左右どちらから追い抜くべきか逡巡し戸惑っている自転車が散見された.ロボットの認知を高める必要がある.また,自転車との混在交通も想定して試験を行っている.図6に試験の様子を示す.自転車は走行中の直進性が比較的不安定であり,ロボットからは左右に揺れる動きとして検出される.ロボットが自転車を追い抜く場合,ロボットが交錯を予測して急停止するケースもあり,自転車とのスムースな混在交通には課題がある.

②は,コスト最適化の課題であり,住宅街を低速走行するコンセプトであったとしても,住宅街と配送拠点間の移動には幹線道路を横断するケースがあり,コスト制約と性能のバランスを考慮する必要がある.3.1節で述べた交差車両の認識距離を延ばすため,コスト次第では専用のセンサを装備することも考えられる.具体的には,ミリ波を用いた交差車両検知FCTA(Front Cross Traffic Alert)センサなどがある.
③について,住宅街の駐車車両や障害物はさまざまなケースがありえるため,連続稼働を行う上で課題となる.住宅街では車道上で住民が作業を行っている光景は珍しくなく,幹線道よりもさまざまなケースが見られた.現段階では,障害物をすべてケースにおいて自動的に回避することはできていない.また,自動配送ロボット特有の問題として,安全な停車空間の確保がある.配送を行うためは路上に停車する必要があるが,空間がないため人間による介入操作を必要とする場合がある.
4.自動配送ロボットの実証実験
これまで,複数個所の公道での自動走行の実証実験を行ってきた.それぞれのポイントと得られた成果について述べる.
4.1 個宅向け配送サービス
郊外の住宅地において,宅配運送事業者の配送物を対象に,自動配送ロボットで宅配を行うサービスを実施した.また,コンビニエンスストアの商品を運び,移動販売を行うサービスカーの実証を実施した.翌年からは,荷物の発送を可能とする集荷サービスや,ECサイトで注文を受けて配送するサービスを実施している.
当地の道路構造は,歩車分離された中央線のない生活道路と,部分的に中央線のある片側1車線の道路がある.住宅地と都市部を接続する道路が限定され,大型の車両などが住宅街を通過しないよう設計された典型的な郊外の住宅地である.歩道の起伏は複雑で,電柱や消火栓,植栽等もあるためロボットが歩道を走行することは困難である.そのため,車道を走行でき,巡回しながら配送を行える中速中型のロボットが適している.
図7に荷物の受け取りの様子と走行の様子を示す.路肩近くを走行することで,追い抜き(進路変更なく横を通過)を行う他車の動きが見られた.

住民からは,自分のタイミングで受け取れる利便性を評価する声があったほか,子供がファンになりリピーターとなるケースもあった.
4.2 事業者間でロボットをシェアリングするサービス
工業地域において,1台の自動配送ロボットをシェアし,複数の事業者間の輸送物流を行う,多用途のシェアリング型物流サービスを実施した.宅配事業者のほかに,コンビニエンスストア,クリーニング事業者,工場などの間で配送と集荷を行った.特に,この地域では労働者の飲食物の物流が最も頻繁であり,労働環境改善にもつながるとして,コンビニエンスストアから飲食物の配送も行った.
当地の道路構造は,歩車分離された最大片側3車線ある幅員の広い道路であり,交通量は少ないが比較的速い大型車両の往来がある.追い抜きやすい道路構造ではあるが,遠距離からトラック運転手が視認できる必要性があるなど,低速車の混在交通における課題が見いだされた.図8に荷物の積載の様子と走行の様子を示す.

参加した事業者からは,集荷や廃棄物回収などの多用途の可能性を評価する声があった.一方で,事業者の業務フローの中に,ロボットを組み込むには時間をかける必要があり,小売など物量が多い事業者から社会実装すべきとの意見が聞かれた.
4.3 移動先で商品販売を行う移動販売サービス
都市近郊のマンションが複数建つ住宅街において,自動配送ロボットが移動販売を行うサービスを実証した.冷蔵機能と商品決済機能を備える自動配送ロボットが,公園やマンション私有地で販売を行い,買い物困難者向けの移動販売サービスの検証を行った.
当地の道路構造は,歩車分離された一方通行の周回路で構成される生活道路であり,早い車両は見られない.訪問者や配達目的の駐車車両が多いこと,一方通行路における他車両への配慮の必要性など,自動走行機能では完全な対応が難しい課題が見いだされた.図9に移動販売の様子と走行の様子を示す.

住民からは,面白さや新しい体験を評価する声が多く,子供が興味を示して並ぶ様子が見られた.一方で,固定的な顧客が付く様子はなく,品揃えが少ないこともあり移動販売と言うよりはイベント販売に近い状態となっていた.
5.実証実験を通じて得られた知見・課題
自動配送ロボットの社会実装に向けて,さまざまな課題があると筆者らは考えているが,ここでは大きく3点を示す.
(1)自律走行技術の向上
前述の通り,遠隔監視を少人数で行う必要があるため,自律走行技術の向上が必要となる.筆者らが取り組んでいる住宅街を低速巡回する走行では,生活道路の使われ方が多様であり,想定外の交通シーンに遭遇し自律走行が中断されることがあった.これは連続運行の支障となり,多数のロボットの同時運用に向けた課題となる.
現在日本では同時3台程度を運用する実証が行われているが,10台程度が当面の目標になると考えられる.また,監視者を1名と限定せず,組織的な監視体制や運行技術を用いて,運用台数と効率を高めることが考えられる.
(2)利用者とのインタフェース(UI/UX)
路上における受け取りインタフェースは模索の段階にある.自動配送ロボットのサービスは,利用者から見れば,人が運ぶ既存のサービスに比べて不便になっており,玄関を開けて路上に出てロボットを操作する必要がある.
一方で,自動配送ロボットは物流のDX化を推し進め,利用者は,スマートホンを経由して荷物の配送を制御でき,荷物の位置をリアルタイムに把握できる.そのため,自身の生活シーンに合わせた受け取りやスケジュール設定ができる利点がある.また,モノやサービスが移動するというコンセプトは,まったく新しいサービスを生む可能性もある.実証では,公共サービスにも活用できるとの意見があった.
こうした新しいUI/UXが,既存の配送サービスを超える付加価値を生み,利用者に受け入れられるか,実証を通じて明らかにする必要がある.
(3)インフラや制度との連携
1章で触れたように道路における未来の姿としてロボットの車道走行が期待される一方で,道路上のどこを走行し,どのように他の交通参加者と共存するか,現在は模索段階にある.
共存を実現する道路インフラの構造や標識,他の交通参加者の理解や安全に調和できる社会認知の向上など,ロボットを開発するだけでは解決しない問題が多くある.海外ではロボットや物流に合わせた専用道路の整備も見られるが,日本の道路の狭さなどを考慮すると共存が必要であり,チャレンジとなる.
参考文献
- 1)経済産業省:自動走行ロボットを活用した配送の実現に向けた官民協議会, https://www.meti.go.jp/shingikai/mono_info_service/jidosoko_robot/index.html
- 2)国土交通省:2040年,道路の景色が変わる,https://www.mlit.go.jp/road/vision/index.html
- 3)ISO 13482 : Robots and robotic devices - Safety requirements for personal care robots.
- 4)IEC 63281 : E-Transporters.
- 5)Nuro, Inc. https://www.nuro.ai/
- 6)Law Commission : Remote Driving Project, https://lawcom.gov.uk/project/remote-driving/
- 7)ISO 22737 : Intelligent transport systems - Low-speed automated driving (LSAD) systems for predefined routes, Performance requirements, system requirements and performance test procedures-.

増田景一
keiichi-masuda@kccs.co.jp
京セラコミュニケーションシステム(株)経営企画室 モビリティ事業開発部 副部長
2001年姫路工業大学前期博士課程修了.同年入社.コンピューティングアーキテクチャ,モバイルネットワーク,AIの研究開発に従事.

小野田弘士(正会員)
onoda@waseda.jp
2006年早稲田大学大学院理工学研究科博士後期課程修了,博士(工学).2014年より早稲田大学大学院環境・エネルギー研究科准教授,2017年同教授(現職).
採録決定:2024年1月29日
編集担当:小野田弘士(早稲田大学)