まちづくりと一体となったマルチベネフィット型モビリティの社会実装に向けた試み
─南栗橋駅前街区「BRIDGE LIFE Platform」構想を例として─
1.「BRIDGE LIFE Platform」構想
「BRIDGE LIFE Platform構想(以下,BLP構想)」は,埼玉県久喜市の南栗橋駅前街区で進められているいわゆるグリーンフィールド型のまちづくりと次世代モビリティの導入を一体的に進めているプロジェクトである[1].2021年11月10日,久喜市,東武鉄道(株),トヨタホーム(株),イオンリテール(株),早稲田大学小野田研究室の5者間協定により,まちづくりを推進していく旨を公表し,商業施設がオープンした2022年5月末にまちびらきのイベントを実施した.その後,まちづくりの進展に合わせてさまざまな取り組みを行っている.ここでの筆者らの役割は,商業施設から戸建住宅街区への配送や非接触ごみ収集等をユースケースとした次世代モビリティ・ロボットの新しいコンセプトを提示し,社会実装に向けた取り組みを推進することにある(図1).現時点では,こうした新しいモビリティシステムに関するビジネスモデルが確定している段階ではないが,まちづくりの初期段階から実証試験を積み上げていく構想である.本稿では,その取り組みの一端を報告する.
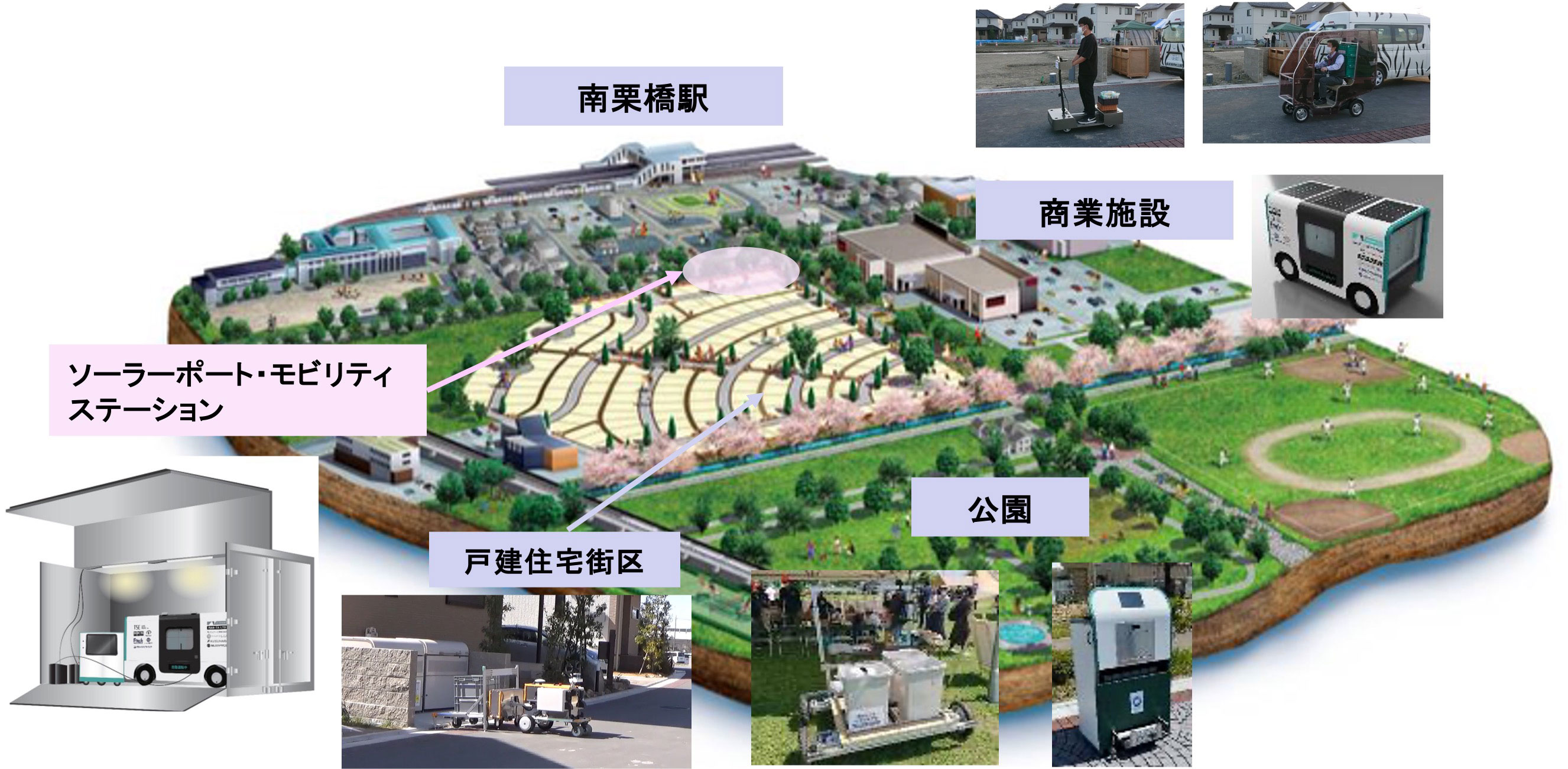
なお,図1に示す街区を「BLP街区」称することとする.商業施設と戸建住宅街区が近接している点が,BLP街区の特長の1つである.
2.マルチベネフィット型モビリティの開発の成果
eコマースの浸透により買い物目的の人の移動が減少する一方,物流の小口回収が増加するといわれている[2].また,感染症対策として,宅配やごみ収集における非接触化の必要性が指摘されている[3].こうした問題に対応するソリューションとして,筆者らは「複数課題の同時解決」を意味するマルチベネフィットのコンセプトを導入したマルチベネフィット型モビリティの開発を行っている[4].マルチベネフィット型モビリティは,モビリティの骨格部分であるシャシを共通化し,乗車用,物流用等の用途を自由に組み替えることを可能としている.たとえば,日中は,乗車用や物流用途に活用し,夜間はごみ収集に活用する等の方法が考えられる.
図2に,マルチベネフィット型モビリティのコンセプトを具現化したプロトタイプの概要を示す.このモビリティは,ステレオカメラと画像認識AIによるヒト追従機能やラジコンによる近接操作等,複数のモードでの走行が可能な仕様となっている.イベント等を中心とした実証試験レベルでは複数地域での実績を積み上げてきた[5].なお,このモビリティは,イベントやテーマパーク等の特定空間内での活用を前提としており,公道での走行に対応する仕様とはなっていない.

図3には,マルチベネフィット型モビリティのコンセプトに基づき,開発してきたモビリティの一覧を示した.自動運転に限定せず,歩道走行用(時速6km/hまで)や2023年7月に施行された改正道路交通法による「特定小型原動機付自転車」の区分に該当するモビリティの開発も進めている.このように,自動運転を前提としたモビリティの導入だけでなく,現行制度のなかで,実装可能なモビリティを段階的に導入していくアプローチを採用している点がBLP構想の特徴といえる.

3.「BRIDGE LIFE Platform」構想に基づくPoC
BLP構想は,2023年6月にまちびらき1周年を迎えた.ここでは,2022年5月のまちびらきイベント以降に実施してきたPoCの結果について述べる.具体的には,異なる3つのモビリティ・ロボットによる「人追従モード」,「遠隔操作」,「自律走行」を検討対象とした.
3.1 人追従モード
ステレオカメラと画像認識AIによる人間を追従する運転モード(人追従モード)であり,図2に示したプロトタイプによるPoCを実施した[6].具体的には,BLP構想のまちびらきイベントで発生するごみの回収に活用した結果を示す.隣接する公園では,イベント開催時にキッチンカー等が出店するため,飲食に由来する容器類を中心としたごみが発生する.こうしたイベントでは,イベント運営者が自治体の指導に従って,仮設のごみ箱を設置することが多い.2022年5月のイベントでは,仮設のごみ箱を設置することなく,マルチべネフィット型モビリティを「動くごみ箱」として導入することとした.なお,こうした公園等の特定空間においては,道路交通法の適用を受けないため,開発したモビリティを走行させることが可能となる.実際の運用は,2~3名の監視員が常にモビリティの周辺に配置しており,このモビリティのオペレーションを熟知している担当者がヒト追従機能と近接操作機能を切り替えながら運用した.結果として,トラブルが発生することなくごみ収集の業務を完遂することができた(図4).

3.2 遠隔操作
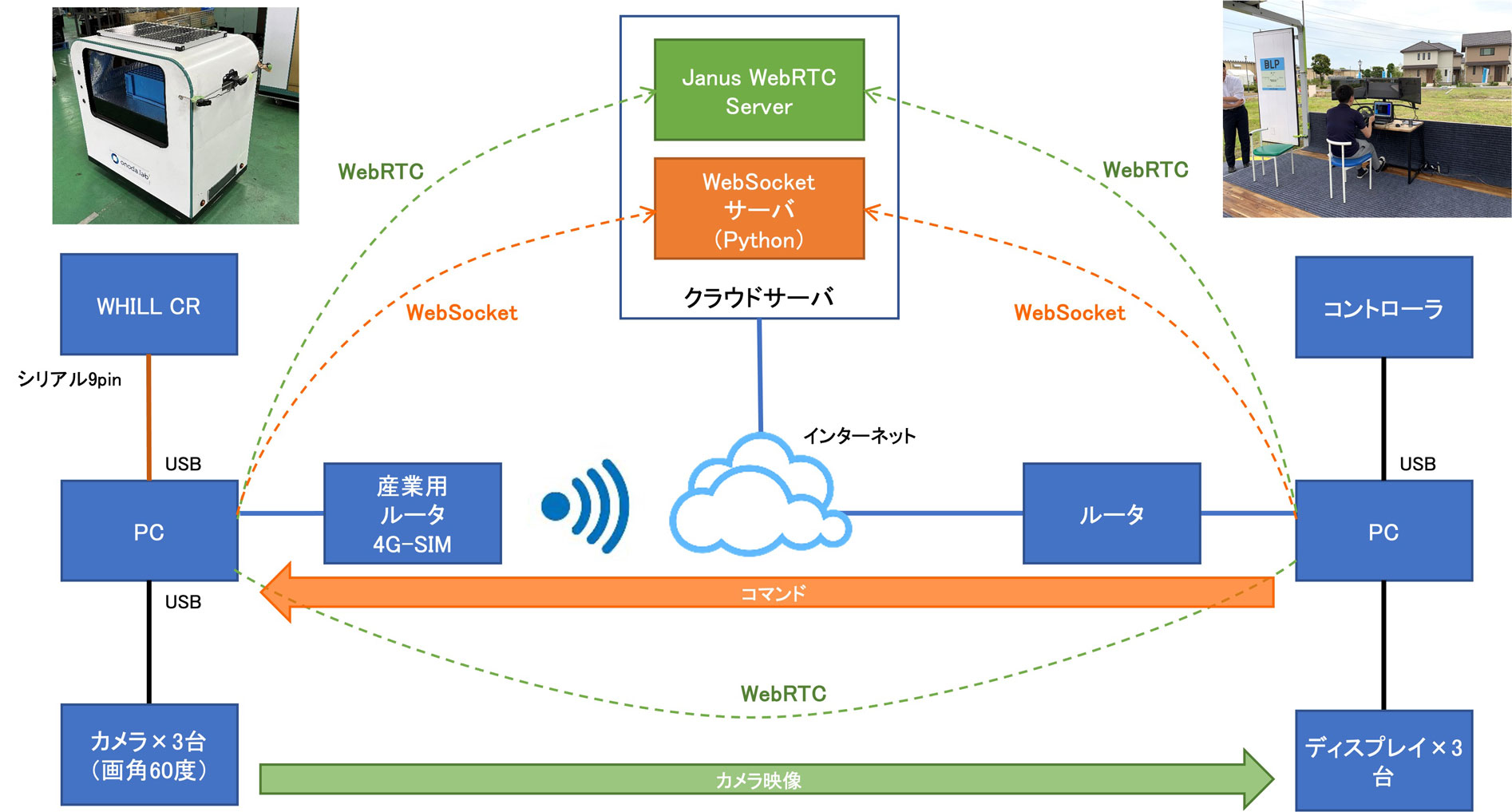
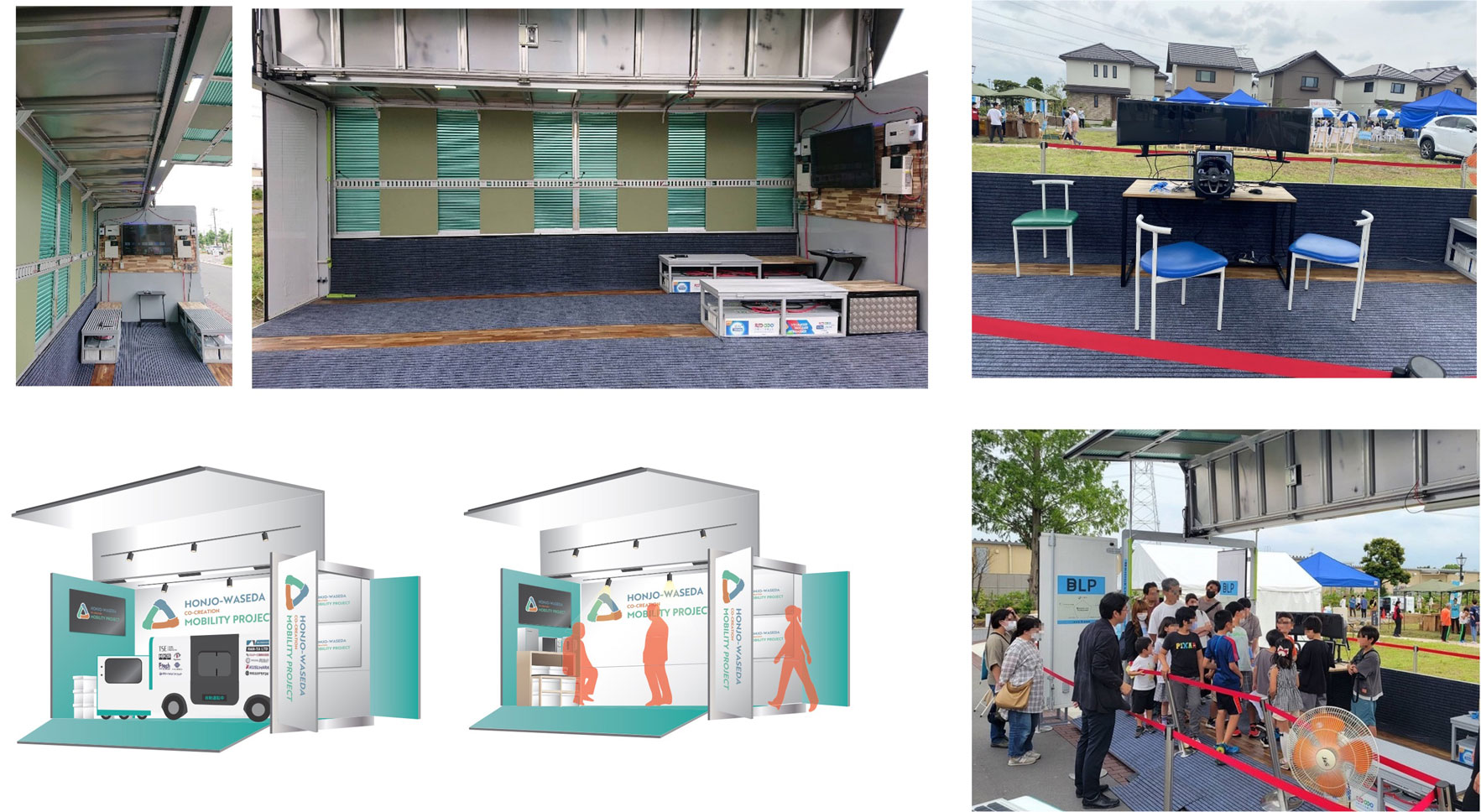
ここでは,改正道路交通法における「遠隔操作型小型車」に該当する区分におけるアプローチを紹介する.将来的に,自動運転システムが社会実装された場合も遠隔監視は必須となると考えられる.その導入に向けたPoCを行うことを目的に,図5に示す遠隔操作システムを構築した.ハードウェアに関しては,WHILL Model CR[7]をベース車両として,配送用に改造した.監視用のWebカメラを3台搭載しており,インターネットを介して遠隔操作を行う.遠隔操作用のPC,モニタ等を設置でき,インターネットへの接続環境が確保されていれば,設置場所を選ばず遠隔操作を行うことができる.2023年6月には,BLP街区内に遠隔操作システム一式を設置し,遠隔操作のPoCを行った.しかしながら,BLP街区は,一般的な通信環境は良好とはいえず,カメラからの伝送画像の遅延等が発生する状況であった.今後,BLP構想においては,ローカル5G等の次世代型の通信インフラの整備を視野にいれているが,現段階で詳細が確定しているわけではない.現在の通信インフラの状況や将来の見込み,モビリティの走行エリア等を精査しながら,計画を具現化していく予定である.
なお,遠隔操作に関しては,埼玉県本庄市や秩父市等の他地域でも走行試験を行ったところ,通信環境が安定していれば,おおむね再現性があることを確認できている.BLP街区においては,商業施設から住宅街区の限定的なルートでの走行試験を立案していく計画である.
3.3 自律走行
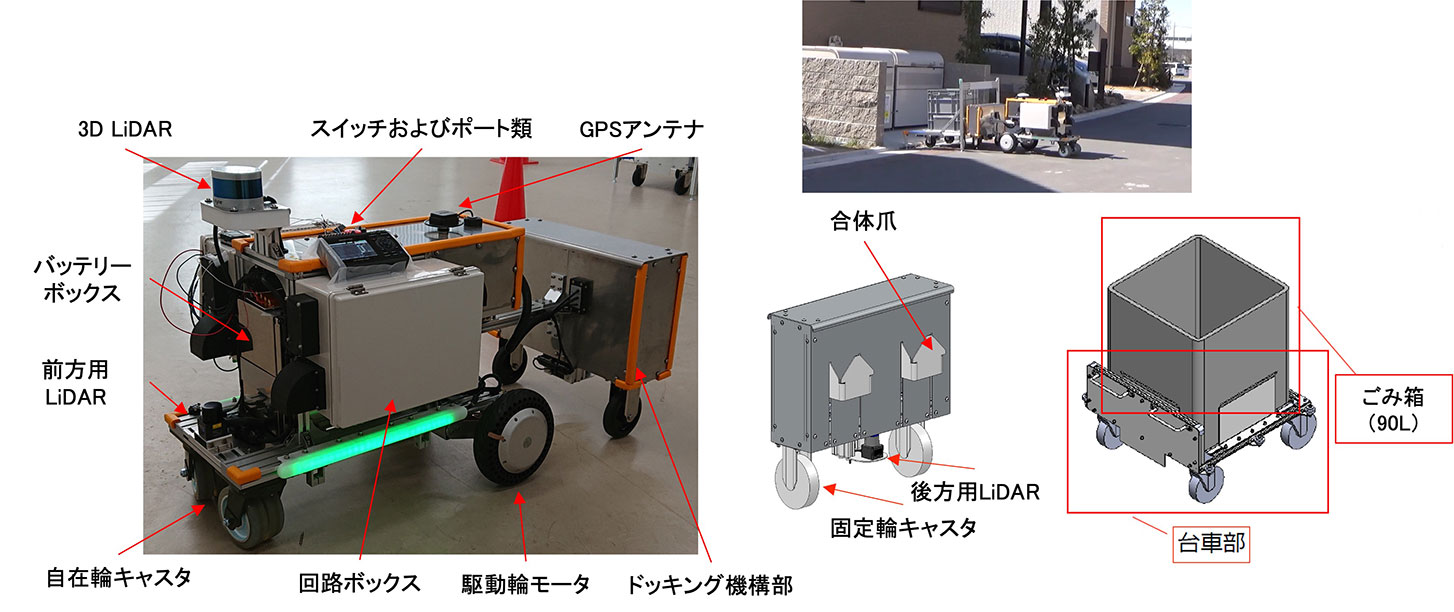
図6に示すマルチベネフィット型トレーラー(以下,本ロボット)は,現地の地図データを作成し,カメラ,センサ,LiDAR(Light Detection And Ranging)によって自律走行を行うことが可能なモデルである.本ロボットは,物流やごみ収集等への応用に特化した牽引型のモデルであり,BLP街区のような特定街区での活用を想定している.2023年6月のイベントでは,想定される人流からごみの発生量を予測し,本ロボットによる自動ごみ収集のPoCを行った.開発・搭載した機能の有効性は確認できたものの,路面の状況や人混み等の現地の環境への影響の配慮が必要であることが示唆された.
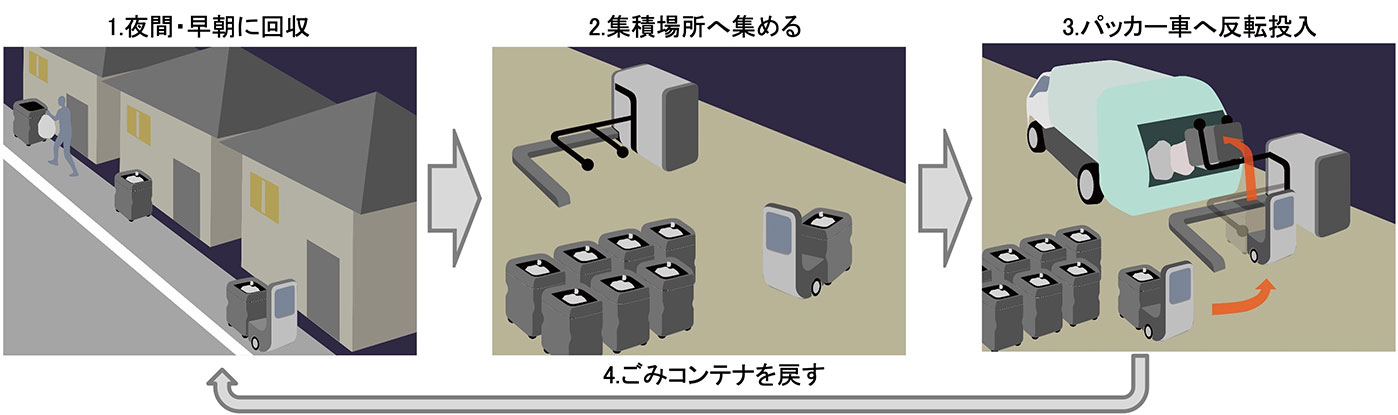
今後は,BLPの住宅街区における社会実装を視野に入れた検証を段階的に進めていく計画である.BLP街区には,約170戸の戸建住宅に対し,ごみの集積所が約10カ所設置される.現状では,ごみ収集車が街区内に入り,作業員が乗降を繰り返し,集積所のごみを順番に回収する.筆者らの提案は,集積所におけるコンテナを自動ごみ収集に対応した仕様に置き換え,夜間もしくは早朝にロボットが1カ所に自動で集積し,別途,開発している反転装置[8]を用いてごみ収集車に投入するイメージである(図7).これにより,戸建住宅街区内へのごみ収集車の進入を最小限にとどめることが可能となる.
また,本ロボットは,ごみ収集だけでなく,物流用途への応用も視野に入れている.プロトタイプである本ロボットでも約150kgまでであれば,牽引可能となっており,近距離の宅配用途に応用できると考えている.3.2節に述べた遠隔操作とともに,商業施設からの住宅街区への宅配用途を想定した公道走行試験の具現化を図っていく計画である.
4.BLP街区におけるまちづくりと一体となったサービス開発の試みと準備状況
BLP構想は,開発したモビリティ・ロボットの展示等を通じて,地域市民やプロジェクトに関与するステークホルダーのニーズを把握しながら進めている.ここでは,この間に得られた知見に基づき,現段階で具体的な取り組みに着手しているサービス開発のコンセプトや準備状況について述べる.
自動運転システムに関しては,3章で示したように,技術的な観点からの段階的な実証を積み重ねていく計画である.商業施設と戸建住宅街区が近接している点が,BLP街区の特長である.そのために,BLP街区に居住する住民向けに特化したサービス開発が当面のターゲットとなる.とりわけ,オンデマンド型の「即時配達」に関しては,一定のニーズがあることが確認できている(図8).将来的には,自動運転システムの導入がターゲットとなるが,その前段階として,現行の道路交通法に適合したモビリティのシェアリングによる実証試験を計画している.現在,特定小型原動機付自転車の区分に該当するパーソナルモビリティ5台の製作およびナンバ取得が完了している(図9).小規模ではあるものの,自動運転システムのPoCと並行して,短距離の移動ニーズを発掘していく計画である.たとえば,通勤時のBLP街区から南栗橋駅への移動は確実に存在する.BLP街区から南栗橋駅までは,手動運転で移動し,自動運転により,モビリティステーションまでの移動はターゲットの1つとなっている.


さらに,こうしたローカルで活用するモビリティやロボットを運用する場合,それを保管するためのスペースや充電インフラが必要となる.図10は,こうした課題へのソリューションとして開発したマルチベネフィット型のモビリティステーションである.筆者らが開発したモビリティは,100Vでの充電が可能なため,太陽光発電と蓄電池のみで必要な充電機能を提供することが可能である.また,ステーションの空間内は,モビリティの保管(駐車)スペースとして活用でき,テレワークの空間としても活用できるコンセプトである.現在は,仮設のインフラとして,BLP街区内に設置しているが,実証試験を積み重ねていく過程で,適切な配置場所を選定していく予定である.
5.社会実装に向けた課題
本稿では,BLP構想を例として,筆者らの研究グループの取り組みの一端を述べた.本プロジェクトを進めていく中で,現段階で明らかとなっている社会実装に向けた課題を述べることとしたい.
BLP構想に限らず,自動運転システムを社会実装していくためには,通信インフラの整備が課題となる.ローカル5Gの導入可能性に関しては,検討に着手してはいるものの具体的な計画には現時点で落とし込めていない.他地域の事例等を参照しながら,BLP街区における実現可能性を継続的に検討していく必要がある.
自動運転システムの導入にあたっては,「安全・安心」が重要なキーワードとなる.そのために,モビリティやロボット等に搭載されるセンシングシステムの高度化は必要であるが,一方で,周辺のインフラとの協調も必要となる.たとえば,BLP街区においては,街区内の道路整備のタイミングにあわせて,モビリティやロボット等と通信可能なセンシングシステムを道路に埋め込むことの議論も行っている.
さらに,本稿で紹介した事例からも分かるように,適用する技術(人追従,遠隔操作,自律走行)ごとに別々のシステムもしくはプラットフォームを活用している.自動運転システムに必須となる地図情報等のプラットフォームやそれを活用したモビリティシェアリング等のサービスは,統合化を図ることが重要となる.
これらの課題に関しては,現段階で,具体的な方向性が定まっているわけではない.現場でのフィールドを有することを強みとし,持続可能なまちづくりにつながる取り組みを継続的に検討していきたいと考えている.
参考文献
- 1)小野田弘士:次世代モビリティとまちづくりへのアプローチ,建設マネジメント技術,Vol.532, pp.79-86 (2022).
- 2)国土交通省:2040年,道路の景色が変わる,https://www.mlit.go.jp/road/vision/pdf/01.pdf
- 3)小野田弘士:ごみ収集の非接触化・自動化に向けた展望,廃棄物資源循環学会,Vol.32, No.2, pp.155-162 (2021).
- 4)Onoda,H : Smart Approaches to Waste Management for Post‐COVID‐19 Smart Cities in Japan, IET Smart Cities, Vol.2, No.2, pp.89-94 (2020).
- 5)小野田弘士:Circular Economy (CE) に貢献するデジタル技術の現状と展望,日本LCA学会誌,Vol.19, No.2, pp.79-84 (2023).
- 6)小野田弘士:非接触型ごみ収集システムの要素技術の開発とPoC(Proof of Concept),Indust= いんだすと,Vol.37, No.8, pp.30-36 (2022).
- 7)WHILL : Model CR, https://whill.inc/jp/model-cr
- 8)小川聡久,加藤浩瑞,久保田耕介,山本純大,壺内良太,菊池 亮,小野田弘士:非接触型ごみ収集に対応したごみの排出・反転プロセスの開発とPoC,廃棄物資源循環学会研究発表会講演集,第33回廃棄物資源循環学会研究発表会,p.103 (2022).

小野田弘士(正会員)
onoda@waseda.jp
2006年早稲田大学大学院理工学研究科博士後期課程修了,博士(工学).2014年より早稲田大学大学院環境・エネルギー研究科准教授,2017年同教授(現職).
採録決定:2024年1月24日
編集担当:服部雅一((株)東芝)