接客ロボット遠隔操作の楽しさを引き出すには?:ゲーム化インタフェースの初期検討と設計指針の提案
How to Elicit Enjoyment in Teleoperation of Customer Service Robots?: Initial Investigation of a Gamified Interface and Proposal of Design Guidelines
1. はじめに
近年,労働力不足や高齢化社会が進行する中で,接客ロボットの導入が急速に進められている.具体的には,博物館[1]-[3]や服飾雑貨店[4],ショッピングモールでの道案内[5],試供品の提供[6],クーポン配布[7]や客引き[8]など,様々な場面での活用が注目されている.
このような状況の中,遠隔操作可能な接客ロボットは,誰もが時間や場所を問わず操作できる利便性から特に注目を集めており,その操作インタフェースに関する研究も進められている.たとえば,カフェにおける接客ロボット「OriHime」の外出困難者向けの操作インタフェースが開発された例がある[9].また,初心者でも操作可能な小売店における接客ロボット操作インタフェースを作成し,操作未経験者であっても接客ロボットによる訪問客の購買活動を促進できたことが明らかにされた研究も存在する[6].
しかし,このような遠隔操作において,操作者の楽しさの欠如により,操作者が一定時間操作を続けると単調さを感じ,最終的に接客タスクの継続意欲低下につながるということが課題として指摘されている[6].
そこで,本研究では,操作者の楽しさを引き出すインタフェースの開発とその有効性の検証を第一の目的とした.さらに,操作者の楽しさを引き出すインタフェースの設計指針をまとめることを第二の目的とした.
操作者が楽しさを感じやすくするため,自由度とゲーム性に着目した2種類のインタフェースを開発した.1つ目は「高自由度インタフェース」である.過去の研究では,ロボットの言動の選択肢が少なく,操作自由度が低いことが,操作者が操作を楽しめない要因として指摘されている[6].このため,豊富な選択肢と高い操作自由度を持ったインタフェースを作成した.2つ目は「自由度増加インタフェース」である.選択肢の多さは効果的であると考えられる一方で,操作が複雑になり過ぎるという懸念も存在する.そこで,ゲーミフィケーションにおける,ポイント,アップデートというゲーム要素[10]を取り入れ,操作中に選択肢を段階的に増加させる方法を採用した.具体的には,時間経過によって獲得できるポイントと操作に応じてフィードバックされるポイントを用いて,新たな操作選択肢を段階的に追加(アップデート)できる仕組みをインタフェースに導入した.ゲーミフィケーションは,ゲームの考え方やデザイン・メカニクスなどの要素を,ゲーム以外の社会的な活動やサービスに利用することと定義され[11],楽しさを通じてタスクの継続性を高め,パフォーマンスを向上させる可能性から運動や学習[12]-[14]などに対して多くの研究が行われているが,ロボットの遠隔操作に使われた例はほとんどない.
本研究では,上記の2つのインタフェースの有効性を実証するため,ショッピングモールでロボットとの会話および遠隔操作体験に関するイベントとして実験を実施した.実験を通じて操作者が各インタフェースを用いた際の操作に対する印象を調査し,実験中の操作者と通行人とのインタラクションに関する分析を行った.
2. システム概要
2.1 接客ロボットシステム
本実験で用いるシステムは,ロボット側と操作インタフェース側の2つで構成されている.ロボット側は,図1に示すようにVstone社のヒューマノイドロボットSota*1本体に,周辺機器として,コンピュータ(Skynew K6,Core i7-8565U,Windows11),単一指向性マイク(Sanwa Supply MM-MCU04BK),スピーカ(Sanwa Supply MMSPL-19UBK),180度カメラ(ELP USBFHD06HL180-J)を追加することで構成されている.

Fig. 1 Customer service robot “Sota”.
操作者がロボット側の映像を見られるように180度カメラがロボットの後ろに取り付けられている.この映像により,操作インタフェース側からロボットに話しかける通行人や,ロボットの背後の様子がリアルタイムに確認できる.ウェブブラウザ上で動作する操作インタフェース側から,操作者はロボットのカメラからの映像をリアルタイムで監視し,マイクからの音声を聞くことができる.
使用したロボットSotaの身長は28cmである.Sotaは首に3軸,肩に2軸,肘に2軸,胴体に1軸,合計8軸を持っており,頭の向きの変更,肩の回転運動,腕の曲げ伸ばし運動,体の回転運動を実現できる.また,Sotaの目にはLEDが搭載されており,点灯させることが可能である.SotaにはBluetoothやWi-Fi通信を統合したIoT機器向けコンピュータ・オン・モジュール・システムであるIntel(R)Edison CPUが搭載されている.
2.2 遠隔操作インタフェース
本実験では,ロボットの遠隔操作において,操作者はロボット背後のカメラ映像を通して現地の様子を確認し,それに応じてボタンをクリックすることで事前に登録しておいたロボットの発話内容やジェスチャを選択できるようにした.過去の研究では操作が次第に楽しくなくなり飽きてきた原因として,操作自由度の低さを挙げていた[6].そこで本実験では,操作自由度に着目した2種類のインタフェースとして,高自由度インタフェースと自由度増加インタフェースを作成した.
2.2.1 高自由度インタフェース
高自由度インタフェースは,図2に示すようにカメラ映像エリア,操作エリア,ボタン追加エリアの3つのエリアから構成されている.

Fig. 2 A high degree of freedom interface.
カメラ映像エリア
本エリアには,ロボットの背後からの映像が表示される.操作者はこの映像を確認しながらロボットを操作することができ,映像内をクリックすると,クリックした箇所をロボットが見るように頭と胴体が動く機能がある.ロボットの発話内容は本エリアの下部に,通行人の発話内容の音声認識結果は本エリアの上部に表示される.
操作エリア
本エリアには,ロボットを操作するためのボタンが45個表示される.これらのボタンは接客タスクに使用できる基本的なロボットの発話内容やジェスチャが事前に実験者によって登録されており,発話ボタン39個,ジェスチャボタン6個で構成される.発話ボタンをクリックすることで,そのボタンに記載された文をロボットが合成音声によってそのまま発話する.発話ボタンの具体例として,挨拶(「こんにちは」,「僕はSotaです」,等),雑談(「今日は何しに来たの?」,「いいね!」,等),勧誘(「この紙をぜひ取って!」,「あなたも僕の遠隔操作をしてみませんか?」,等)などがある.ジェスチャボタンをクリックすることでそのボタンに記載されたジェスチャをロボットが実行する.具体例として,「通行人にアピール」ボタンがある.このボタンをクリックすることで,ランダムに選ばれたロボットの左右いずれかの手を振る.高自由度インタフェースでは,それぞれのボタンは操作開始時からすべて使用可能とした.
ボタン追加エリア
本エリアには,発話ボタンを追加することができる発話自作ボタンが表示されている.このボタンをクリックすることで,入力欄を持ったウィンドウが開き,そこに具体的な発話内容を入力することで,操作者は発話ボタンを追加できる.
2.2.2 自由度増加インタフェース
自由度増加インタフェースは,図3に示すように前節の高自由度インタフェースと同様のカメラ映像エリア,操作エリア,ボタン追加エリアの3つのエリアから構成されている.
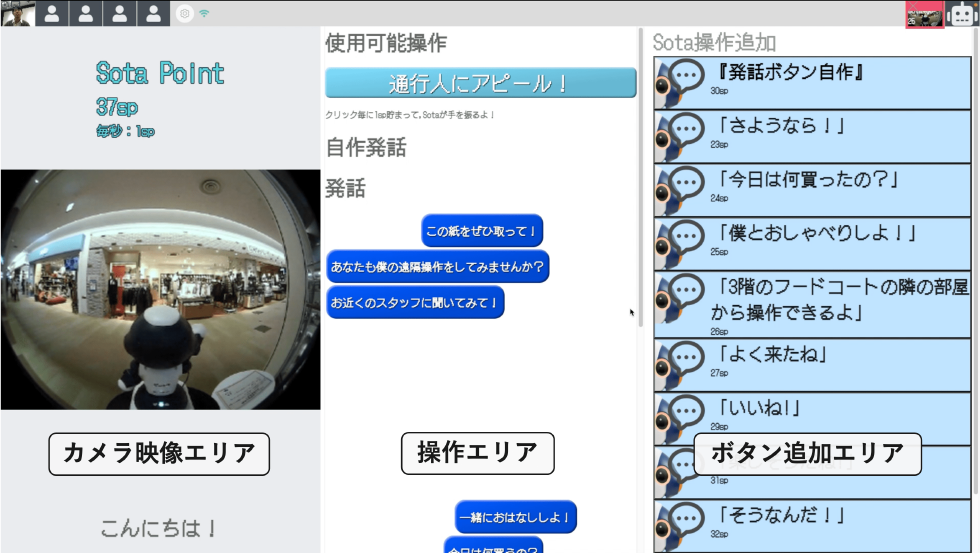
Fig. 3 A gradual flexibility degree of freedom interface.
ここでは,選択肢を段階的に増やす方法として,ゲーミフィケーションにおける,ポイント,アップデートというゲーム要素[10]を導入した.具体的には,時間経過によって獲得できるSota Point(sp)と操作に応じてフィードバックされるspを用いて(ポイント),接客ロボットの操作選択肢を段階的に追加(アップデート)できる仕組みをインタフェースに導入した.
自由度増加インタフェースの操作は,まず「Game Start」ボタンをクリックすることから始まる.操作開始時点では「通行人にアピール」ボタンしか使用できないが,そのボタンをクリックすることと,通行人の顔をクリックし通行人と目線を合わせることで,ポイントが得られる.そして,操作者が十分なポイントを蓄積すると,「ボタン追加エリア」から新たな操作ボタンを追加することができ,より選択肢の増えた操作が可能となる.
これにより,操作を続けていくことで,操作の自由度が段階的に増加し,操作者がより多くの選択肢を持ってロボット操作をすることが可能となる設計となっている.
カメラ映像エリア
本エリアには,前節の高自由度インタフェースと同様の機能に加え,フィードバックされたポイントがロボット映像の上部に表示される.このポイントは時間経過に応じて取得できる(毎秒1sp)他に,「通行人にアピールボタン」をクリックした際(クリックごとに1sp)と,通行人の顔が認識された場所をクリックした際(クリックごとに100sp)に取得できる.これにより,操作時間の経過によって段階的に操作の選択肢が増加する仕組みを作成した.なお,顔認識を実装する際に必要となる,映像上の顔座標の取得には,MediaPipeを使用した.
操作エリア
本エリアは,前節の高自由度インタフェースと同様の機能であるが,操作開始時には「通行人にアピール」ボタンのみが使用可能であり,時間経過とともに操作者が取得したポイントを使用して他のボタンを追加できる.また,本エリア上部に「Game Start」が配置されており,操作開始時に操作者がクリックすることで時間経過ポイントの取得が開始される.
ボタン追加エリア
本エリアは,前節の高自由度インタフェースと同様の機能に加え,取得したポイントを使用して,追加可能なボタンの候補が9個表示されている.操作者がボタンを1個追加すると,事前に登録されたボタンがすべて追加されるまで,合計45個のボタンの中からランダムに1個が補充される.初期に表示されているボタンは10spまたは20spを消費することで追加可能である.その後の補充分は20spを初期値として1spずつ増加していく.また,前節の高自由度インタフェースと異なり,発話自作ボタンの使用にもポイントを消費する必要がある.この消費するポイントは30spを初期値として,発話自作ボタンを使用するたびに10spずつ増加する.
sp(Sota point)の設計においては,操作者の操作への慣れの変化を考慮した.具体的には,操作序盤では操作者が操作に不慣れであることを想定し,ポイント消費を低く設定することで,ボタンの追加を比較的容易にし,インタフェースへの適応や自由な探索を促すことを意図した.一方で,操作中盤以降は操作への慣れを想定し,ポイント消費量を徐々に増やし,ボタンの追加に計画性や判断が求められるよう設計することで,目的意識を伴った戦略的な操作を促すことを意図した.
その他のゲーム的要素
その他のゲーム的要素として,BGM*2,*3と効果音*4,*5,*6を導入した.BGMは,「Game Start」がクリックされたタイミングで再生が開始される.効果音は操作開始ボタンクリック時,通行人にアピールボタンクリック時,ボタン追加時,通行人の顔が認識された箇所クリック時,ポイント不足によりボタンを追加できなかったときに再生した.
3. 大型商業施設でのフィールド実験
本実験は,開発した2つのインタフェースの有効性を検証するため,ショッピングモールでロボットとの会話および遠隔操作体験に関するイベントとして実験を実施した.ただし,本実験の被験者(遠隔操作体験に参加した人)は友人同士や家族などの複数人のグループ(操作被験者グループ)で構成されていた.遠隔操作体験では,操作被験者グループがランダムに選ばれた2つのインタフェースのうちいずれかを用いて接客ロボットを遠隔操作し,通行人に対しロボットのそばに置かれた「本実験の被験者を募集するためのチラシ」を手に取るように促し,本実験である遠隔操作体験の参加を促すという接客タスクを行った.実験を通じて操作者がインタフェースを用いた際の操作に対する印象を調査し,実験中の操作者と通行人とのインタラクションに関する分析を行った.本実験は,筆者らが所属する大学の倫理審査委員会からの承認を得て実施された(R1-5-17).
3.1 実験環境
3.1.1 接客ロボット側
図4は,設置した接客ロボット付近を上から見たときの概略図である.本実験では,通行人撮影用カメラをロボットの背後に設置し,ロボットと人がインタラクションを行う様子を継続して撮影した.
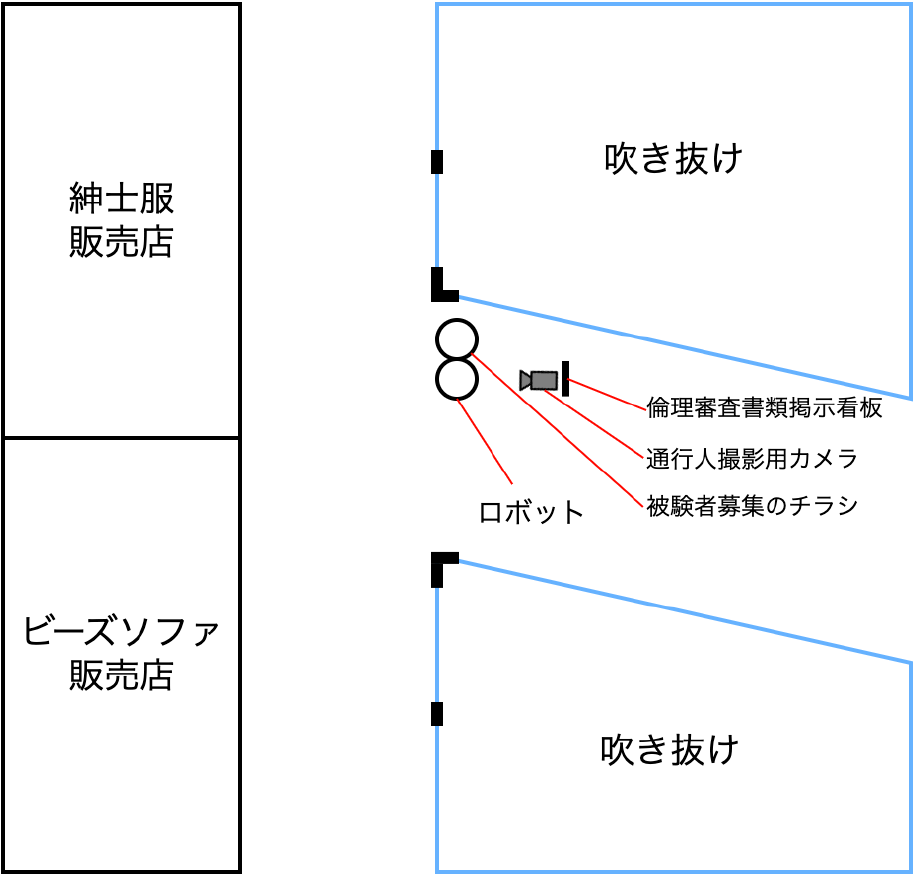
Fig. 4 Top-Down view of the experimental setup for the robot side.
3.1.2 遠隔操作側
図5は,接客ロボットを操作する部屋を上から見たときの概略図である.本実験では,操作者撮影用カメラを操作者のそばに設置し,ロボット操作を行う様子を継続して撮影した.実験システムは,ノートパソコン,マウス,モニター,オーディオ機器で構成されている.ただし,モニターは遠隔操作インタフェースを表示するために用い,操作中のモニター映像を録画した.
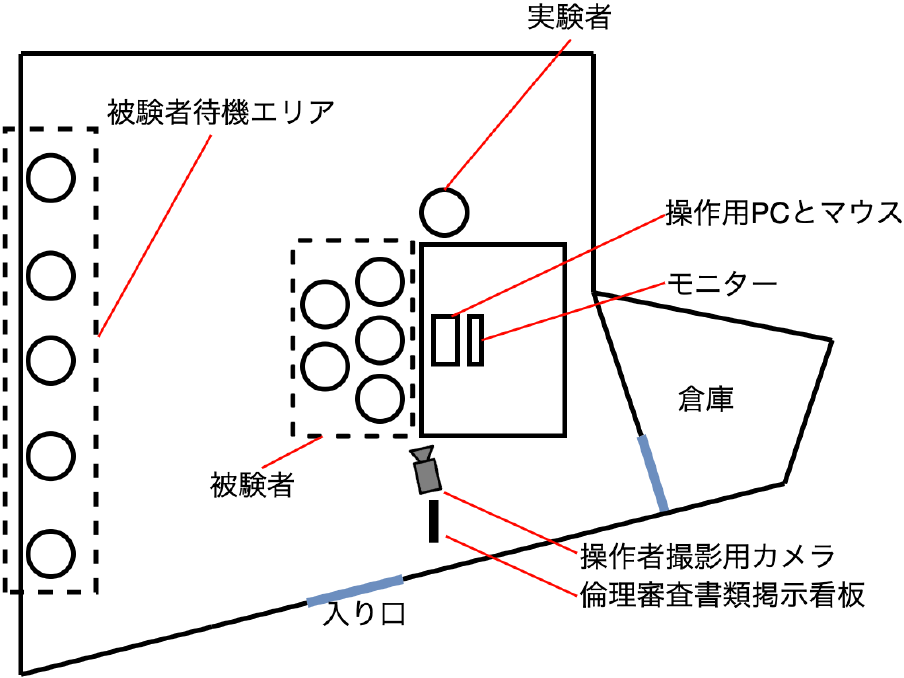
Fig. 5 Top-Down view of the experimental setup for the operator side.
3.2 手順
以下に本実験の手順を示す.
- (1) 操作被験者グループが本実験への参加に同意した.
- (2) 実験者から本実験タスクの概要に関して以下の3つの説明を受けた.
( a ) 接客ロボットを遠隔操作して通行人に対し「本実験の被験者を募集するためのチラシ」を手に取るように促し,ロボットの遠隔操作体験の参加を促すという接客タスクをミッションとして遂行すること
( b ) タスクの流れとして,通行人の呼び止め,雑談,チラシの提示の3つのステップがあること
( c ) 任意のタイミングで操作を終了することができること - (3) 実験者からロボットの操作方法に関して説明を受けた.(自由度増加インタフェースでは,ポイント取得方法とボタン追加方法についても合わせて説明を受けた.)
- (4) 教示終了後,操作被験者グループは接客ロボットの遠隔操作を開始した.
- (5) 操作被験者グループが実験者に実験終了の旨を伝え,操作を終了した後,アンケートに回答し,実験者からのインタビューを受けた.
ただし,一部の操作被験者グループは操作者の交代やマウスを一緒に握っての操作を行っており,操作被験者グループ内での指示やアドバイスなどの会話は自由に行われた.また,回答ができない子供を除いて,実験に参加した操作被験者グループ全員がアンケートに回答した.実験中の操作被験者グループの様子を図6に,通行人の様子を図7に示す.
Fig. 6 Operator group during the experiment.

Fig. 7 Pedestrians during the experiment.
3.3 評価手法
3.3.1 アンケート評価
作成した2つのインタフェースを用いた接客ロボットの遠隔操作に対する,操作被験者グループの印象を評価するため,操作終了後に主観評価アンケートを行った.アンケート項目には,楽しさを評価するためのQ1の他に,楽しさに影響する可能性のある飽きと難しさについても評価した.飽きに関する質問はQ2に加え,Q4において,操作の追加希望時間について回答させた.難しさはQ3において評価した.Q1-Q3の質問には7段階のリッカート尺度を用いた.
Q1 ロボットを操作し,通行人を呼び込むのは楽しかった(「1:このうえなくつまらない」~「7:このうえなく楽しい」)
Q2 ロボットを操作し,通行人を呼び込むのは次第に飽きた(「1:全くそうは思わない」~「7:とてもそう思う」)
Q3 ロボットを操作するのは難しかった(「1:全くそうは思わない」~「7:とてもそう思う」)
Q4 もしこの後に予定がなかったとしたら,どの程度操作を続けていたと思いますか?(時間で回答)
3.3.2 行動評価
操作の楽しさに対する具体的な指標の1つとして,笑いが生じた場面の発生回数を数えた.Petraki & Nguyen(2016)の研究では,ユーモアが学習環境をより快適で魅力的にし,学習への意欲と持続性の向上に寄与することが示されている[15].Fredrickson(2001)の拡張・構築理論では,笑いのようなポジティブ感情は人の思考・行動の幅を広げることが示されている[16].これらの知見を踏まえ,笑いは継続意欲につながる指標になると考え,評価指標の1つとして採用した.ただし,本研究では操作被験者グループのうち,誰か一人が声を上げて笑った瞬間を笑いが生じた場面と定義した.また,操作の楽しさに影響する可能性がある飽きに対する指標として,操作被験者グループの操作継続時間を調査した.操作継続時間は,操作被験者グループがマウスに触れた瞬間から実験者に実験終了の旨を伝えたタイミングまでとした.
4. 結果
実験期間は2023年12月16日(土)から2023年12月20日(水)の5日間であり,大阪のショッピングモールである“ららぽーとEXPOCITY*7”において10時から20時まで実験を行った.本実験中に,ロボットの前で立ち止まったもしくは会話を行った通行人は合計300人であった.また,接客ロボットの前を通過した通行人は合計4546人であった.操作被験者グループは合計38組(合計100人,1組あたり平均2.6人,高自由度インタフェース:19組,自由度増加インタフェース:19組)であった.このうち,35組は通行人としてロボットと会話した後に実験に参加した.ただし,被験者には実験参加に対する謝金は支払わなかった.主観評価アンケートへの回答は68人(高自由度インタフェース:33人,自由度増加インタフェース:35人)から得られた.回答者の属性は,男性40人,女性26人,性別無回答2人であり,年齢は平均23.07歳(標準偏差14.94歳)であった.主観評価アンケートの結果を図8a各質問項目に対する評価の中央値およびIQRを表1に,統計検定の結果を表2に示す.なお,本研究では,質問項目Q1~Q3における各インタフェースの主観評価がチャンスレベル(4:どちらともいえない)と比較してどのような位置づけにあるかを明らかにするため,チャンスレベルを第三の比較水準として統計解析に加えた.Q1~Q3について,高自由度インタフェース,自由度増加インタフェース,チャンスレベル間の差を比較するため,Kruskal-Wallis検定を行った.その結果,楽しさ(Q1)および難しさ(Q3)では有意差が認められたが,飽き(Q2)では有意差は確認されなかった.楽しさ(Q1)と難しさ(Q3)については,Mann-WhitneyのU検定による事後比較を行い,Bonferroni法による補正を行った.その結果,楽しさ(Q1)では,両インタフェースともにチャンスレベルと比較して差が有意であったが,高自由度インタフェースと自由度増加インタフェース間には有意差はなかった.難しさ(Q3)では,高自由度インタフェースとチャンスレベル間の差が有意傾向であったが,自由度増加インタフェースとチャンスレベル間,高自由度インタフェースと自由度増加インタフェース間で有意な差は認められなかった.次に,操作の追加希望時間(Q4),笑いの発生回数,操作継続時間について,Mann-WhitneyのU検定によって両インタフェース間で比較を行ったが,いずれにおいても有意な差は認められなかった.

Fig. 8 Results of the subjective evaluation questionnaire.
Table 1 Median and IQR of each questionnaire item.
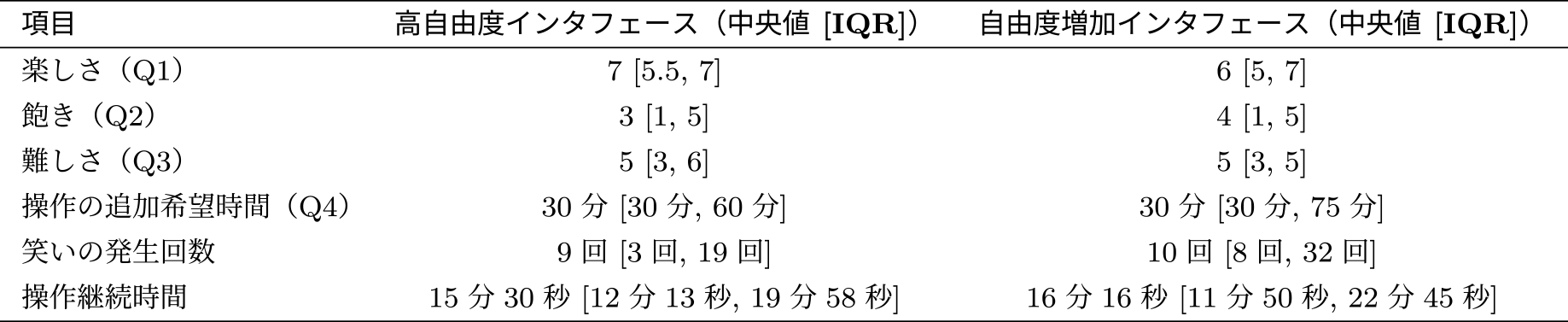
Table 2 Results of statistical tests.

5. 考察
5.1 操作に対する印象評価
まず,操作の楽しさについて考察する.図8aの操作に対する楽しさの印象評価(Q1)において,両インタフェースはチャンスレベルの4(どちらともいえない)と比較して差が有意であり,操作者により高く評価されたことから,いずれのインタフェースであっても操作者が楽しんでいたことが分かる.さらに,実験後のインタビューにおいて,「楽しかった」,「ロボットを動かすのが楽しかった」,「家に帰ってもやっていたい」というような操作が楽しかったことに言及するコメントが38組中10組(26%)から得られ,操作体験が全体的に楽しめるものであったことが示唆された.以上の結果から,両インタフェースは操作者の楽しさを引き出すことができた点で有効であり,本研究の第一の目的であった「操作者の楽しさを引き出すインタフェースの開発とその有効性の検証」は達成されたといえる.
次に,操作の飽きについて考察する.図8aの操作に対する飽きの印象評価(Q2)において,高自由度インタフェース,自由度増加インタフェース,チャンスレベル間で有意差が認められなかった.このことから,両インタフェースにおいて操作者が操作に対して飽きを感じていたわけでも,感じていなかったわけでもないと考えられる.それと同時に,本研究で開発した2種類のインタフェースによる操作者の飽きを抑制する効果も確認できなかった.これは,表1に示すように,本実験の操作時間が高自由度インタフェースでは中央値が15分30秒,自由度増加インタフェースでは中央値が16分16秒であり,さらに両条件ともに楽しんでいたことから,飽きを感じるほど長く操作していなかったことが原因ではないかと考えられる.今後の研究では,より長時間操作した際の操作の飽きについて調査する必要がある.
最後に,操作の難しさについて考察する.図8aの操作に対する難しさの印象評価(Q3)において,高自由度インタフェースはチャンスレベルと比較して差に有意傾向があり,操作者により難しいと評価される傾向が示唆されたが,自由度増加インタフェースでは有意差が確認されなかった.これは,自由度増加インタフェースでは,徐々に使える選択肢の数が増えていくので,操作者が徐々に操作に慣れていくことができるのに対し,高自由度インタフェースでは,操作開始時から使用できる選択肢の数が多かったため,操作の習熟の点において難易度がより高かった可能性があったと考えれる.しかし,楽しみにおいては,高自由度インタフェースにおいても楽しんでいたという結果が得られている.したがって,本インタフェースの難易度が楽しさを損なわせるほど難しいものではなかったと考えられる.
5.2 操作に対する行動評価
図9aの笑いの発生回数において,両インタフェース間で有意差はなかったが,自由度増加インタフェースでは,高自由度インタフェースと比較して,上ヒンジや最大値が高く,ばらつきが大きい傾向がみられた.このばらつきは,自由度増加インタフェースに導入されたゲーミフィケーション要素により,操作者ごとの操作スタイルやインタフェースの状態が多様化し,それに伴って生じるインタラクションが異なったことに起因すると考えられる.実際,ボタンを追加しようとしたがポイントが足りず追加できなかった場面,追加できない発話を既存のボタンで代用する場面,同じ効果音が繰り返される場面などで笑いが生じた例が観察され,これらの場面は操作者によって発生したかどうかに差があった.
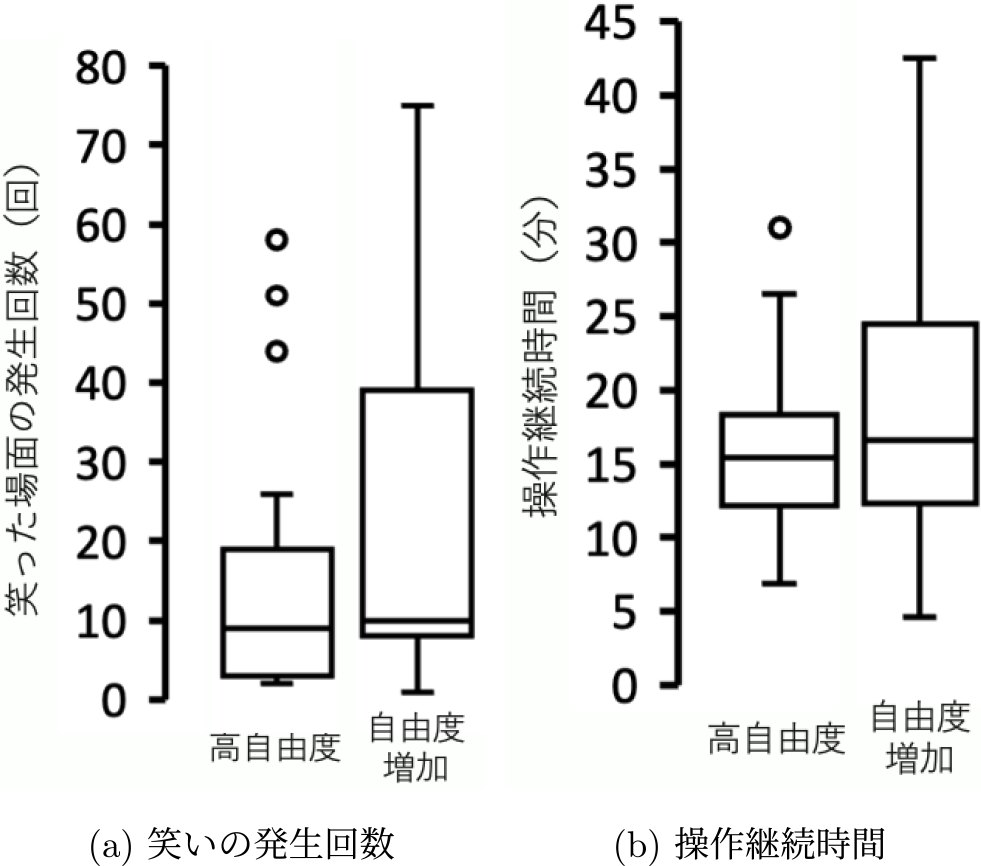
Fig. 9 Results of behavioral evaluation.
図9bの操作継続時間において,両インタフェースで中央値は約15分であった.当初,本研究では操作継続時間を操作者の飽きの指標の1つとして用いることを想定していたが,実験の実施形態がフィールド実験であったことから,次の順番を待つ人がいる,あるいは家族や予定の都合など,継続意欲とは直接関係しない外的要因によって操作を終了するケースがみられた.このことから,継続時間から飽きの程度を評価することは困難であると判断し,本研究では本指標を主要な評価指標とはせず,補助的な参考情報として取り扱うこととした.
加えて,各インタフェースの特徴が操作者の行動にどのように影響を与えていたかを述べる.まず自作されたボタンに関して,両インタフェースにおいて,「そこの君!」や「ちょっとまって」などの呼び止めや「今日は何しにきたの?」や「今日帰ったら何食べるん?」などの雑談に関するものが追加された.自由度増加インタフェースでは,ポイントは基本的に時間の経過に伴って自動的に蓄積される設計となっていたが,ボタンを追加するために,ポイント不足の際に積極的にボタンを連打してポイントを稼ごうとする行動が一部の操作者にみられた.また,操作に余裕があるときや暇なタイミングに,連打によってポイントを貯めておく操作者も確認され,蓄積されたポイントは,新たなボタンの追加やボタンの自作に使用された.なお,操作者グループが獲得したポイントの多寡は操作量に左右され,一律に体験の質を示すものとは言えず,数値的比較では十分な意味づけが困難であると判断し,詳細な分析は実施しなかった.
5.3 笑いが生じた場面の定性的な分析
笑いの発生回数において,両インタフェース間で有意な差がみられなかったことから,上記で述べた操作に対する楽しさ(Q1)と同様に,両条件で楽しみ,同程度笑っていた可能性が考えられる.そこで,操作者の楽しさを引き出すうえで,どのような要素が重要であるかを明らかにするため,本実験では操作の楽しさに対する具体的な指標の1つとして,笑いという操作者グループの行動に着目し,笑いが生じた場面を定性的に分析した.ここでは,操作被験者グループが実験中に笑った対象とその理由に関して,操作被験者グループと操作画面の録画映像から調査し,2人のアノテータによる合意を得た結果をまとめた.
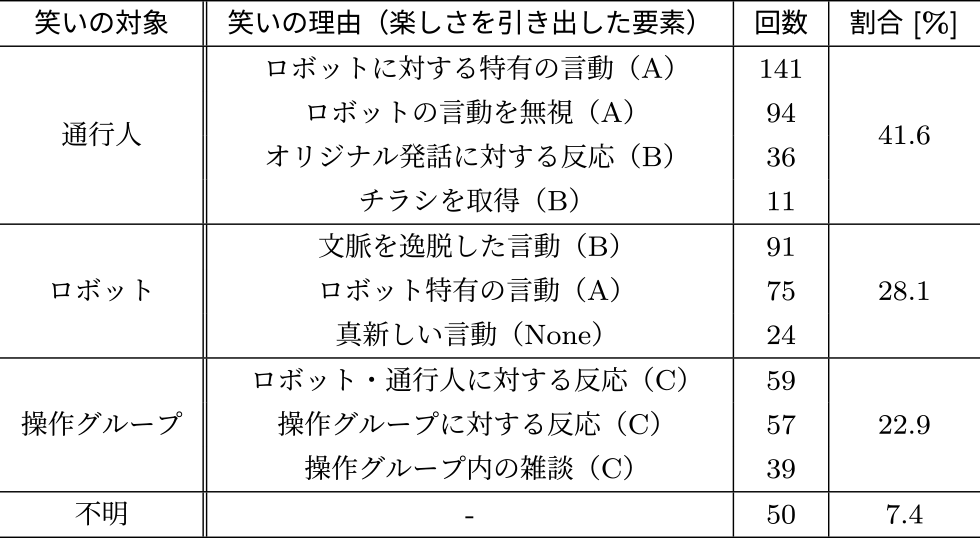
分析の結果を表3に示す.表3より,操作被験者グループが通行人を笑ったのは41.6%,接客ロボットを笑ったのは28.1%,操作者グループを笑ったのは22.9%であり,残りの7.4%は録画した映像からは分からなかった.このことから,操作被験者グループが最も笑っていたのは通行人の発言や振る舞いであることが分かる.また,操作被験者グループが笑った理由は10項目に分類され,各項目の理由で笑いが生じた場面の回数は表3に示したとおりである.これらの分類に基づき,共通している性質を要素としてまとめたところ,(A)匿名性による気軽さ,(B)操作自由度の適度な制限,(C)操作者グループでの体験の共有の3つが操作者の楽しさを引き出すと考えられる重要な要素となっていると考えられた.ただし,「真新しい行動」に関しては,操作者の初期の関心や動機づけには寄与する可能性はあるが,操作に慣れていく過程で次第に消失するものと考えられるため,継続意欲との直接的な関連性は乏しいと判断し,これらの要素に含めなかった.なお,「真新しい行動」の具体例としては,操作序盤のロボットの発話や身体操作(両インタフェース共通),および効果音の再生や,ポイントをボタン連打で蓄積する行動(自由度増加インタフェースのみ)が挙げられる.これらの定性的な分析は厳密なデータ解析を伴わないため,今後異なる環境や条件下での再現性を確認し,一般化可能性についてさらに検討する必要があるが,ここでは主に観察から得られる予測的な洞察を提示する.以下,この3つの要素について,1つずつ詳細を述べる.
Table 3 The target and the behavior that caused the operator group's laughter ((A)–(C): the I/F factors that brought out enjoyment).
5.3.1 A.匿名性による気軽さ
操作者の視点において,本実験で用いた2種類のインタフェースは,操作者がリアルタイムにロボット側のカメラ映像と音声情報を基に次のロボットの行動を判断し,発話ボタンまたはジェスチャボタンをクリックすることで,そのボタンに書かれた言葉もしくはジェスチャをロボットが実行される仕組みであった.そのため,通行人とロボットを介してコミュニケーションをとる際,操作者は通行人の様子を一方的に観察できるが,操作者の声や姿といった情報は通行人に伝わっていなかった.したがって,操作者には通行人に対する匿名性があり,操作者グループの心理的な負担が軽減された可能性が考えられる.結果として,操作者グループは,少し強引に通行人にチラシを手に取るように勧めるような発話や,「行かないで」や「こっち来て」,「そこで歩いている方,かわいいね」などの人同士の会話では少し厚かましく感じられるような発話(ロボット特有の言動)を行うことができた可能性があり,そのような行動を操作者グループが楽しむことができたと考えられる.
さらに,通行人の視点においても,多くの人はロボットが人によって遠隔操作されていることに気付かなかったため,気軽にロボットとやり取りできた可能性が考えられる.結果として,「何歳ですか?」などのロボットの能力を試す言動や「ちょっと壊れてる?」や「何か面白いこと言って」など人同士の会話では少し失礼に当たるような言動(ロボットに対する特有の言動)や,ロボットの挨拶を無視,会話途中での離脱や提案の拒否(ロボットの言動を無視)が起こったと考えられ,そのような行動を操作者グループが楽しむことができた可能性がある.
これらのことから,「匿名性による気軽さ」は,操作者と通行人の双方にとって心理的な負担の軽減につながり,人と異なるコミュニケーション体験を生み出すことができた.これは本研究で開発したインタフェースが操作者に作用した結果生じたものであり,操作者の楽しさを引き出すためのインタフェース設計指針において重要な要素であるといえる.
5.3.2 B.操作自由度の適度な制限
本実験で用いた2種類のインタフェースは,自由度が最も高い状態は等しく,事前に実験者によって発話内容やジェスチャ(発話ボタン:39個,ジェスチャボタン:6個)が登録されており,さらに,自身で新たな発話を登録することができたとしても,ある程度は操作自由度に制限があったといえる.この制限によって,発話やジェスチャの選択が限定され,操作の難易度を適度に高める効果をもたらした可能性がある.結果として,操作者は限られた選択肢の中で最適な発話を選び,それによってチラシ配りを成功させた際に,接客タスクの達成(チラシを取得)に伴う喜びを感じることができたと考えられる.このように,操作の難易度の適度な増加は,操作者の達成感や満足感を高める効果が期待できる.また,難易度が高まることで,成功できない場面も多くなる.たとえば,発話タイミングのずれや,文脈に即した適切なボタンが存在しない場合に別のボタンを代用することによって文脈を逸脱した言動が発生した.しかし,そのようなうまくいかなかった行動でさえも操作者グループが楽しむことができたと考えられる.このうまくいかない体験が,操作者が積極的に発話ボタンを作成する行動を引き起こし,さらにそのボタンに対する通行人の反応(オリジナル発話に対する反応)をまた楽しむというような楽しみの連鎖が起きていた可能性が考えられる.
これらのことから,「操作自由度の適度な制限」は,本研究で開発したインタフェースが操作者に作用した結果生じたものであり,操作者の楽しさを引き出すためのインタフェース設計指針において重要な要素であるといえる.
5.3.3 C.操作者グループでの体験の共有
本実験では,操作者が複数人のグループで構成されており,操作者グループでの体験の共有が操作者の楽しさを引き出す要因の1つとなっている可能性が示唆された.具体的には,「遅い」や「来た来た」などのロボットや通行人の言動に対するコメント(ロボット・通行人に対する反応),「なんでやねんって言おう」や「ミスった」などの操作していない人からの操作指示や操作者による操作理由の説明(操作グループに対する反応),「あざといの作ろう」,「めっちゃやらせてもらったなあ」などの操作方針の相談や感想の共有(操作グループ内の雑談)といったやり取りが発生した.これらの相互作用を通じて,グループ内で笑いが生じ,共通の体験を通じた協働感が醸成されたことで,操作者の楽しさを引き出していたと考えられる.したがって,「操作者グループでの体験の共有」は,操作者の楽しさを引き出すためのインタフェース設計指針において重要な要素であるといえる.
5.4 笑い以外にみられた継続意欲に関する知見
以降では,笑いの生じた場面以外の行動から得られた継続意欲に関する知見を示す.
本研究では,1人で参加した操作者が3名いた.それらの操作者は,それぞれ操作継続時間が10分14秒,6分46秒,6分47秒であり,両インタフェースの中央値と比較すると短く,比較的早期に操作を終了していたことが分かった.それぞれの操作終了の理由は不明であり,必ずしも飽きが原因とは限らず,またサンプル数も少ないが,操作を他者と共有できない場合,体験の広がりに乏しく,継続意欲につながりにくい可能性がある.この知見は,5.3.3における「操作者グループでの体験の共有」の考察を補強するものと考える.
また,本実験において,操作の終了理由は操作者グループごとに様々であったが,終了のタイミングとして,通行人が一時的に少なくなった場面と重なるケースが観察された.このことは,通行人とのインタラクション機会の減少により,操作への積極的な関与の必要性が薄れ,結果として継続意欲が低下する可能性を示唆している.こうした間欠的な暇は,実際の接客業務においても発生しうるものであり,それを補う接客の練習モードなどのシステム的支援を導入することは,操作者の継続意欲を維持するうえで有効であると考えられる.
5.5 制限事項
本研究では操作者の楽しみを笑いが生じた場面によって分析したため,笑いに表出していない楽しみの評価は行わなかった.さらに,笑いには楽しみ以外の要因が含まれる可能性がある.笑いの種類を詳細に分類し,調査することは今後の課題である.一方,5.3.3において「操作者グループでの体験の共有」を操作者の楽しさを引き出す重要な要素として挙げたが,一人で操作を行う場合には,このような体験の共有は生じないため,複数人で操作する場合と比較して楽しさが減少することが課題となると考えられる.そのため,今後一人で操作する場合でも楽しさを引き出せるような仕組みを検討する必要がある可能性がある.また,操作者の楽しさが接客タスクのパフォーマンスに結びついたかは不明であり,今後はパフォーマンスを考慮に入れた調査が必要である.さらに,本実験では,接客ロボットの遠隔操作に興味を持った人を中心に観察を行ったため,興味がない人も含めた調査においても同様の結果が再現可能であるかを検討する必要がある.
6. おわりに
本研究では,遠隔操作型接客ロボットにおいて,操作者が一定時間操作を続ける中で単調さを感じ,最終的に接客タスクの継続意欲が低下するという課題に着目した.この課題を解決するために,以下の2つの目的を設定した.第一の目的は,操作者の楽しさを引き出すインタフェースの開発し,その有効性を検証することである.第二の目的は,操作者の楽しさを引き出すために重要な要素を特定し,それを設計指針としてまとめることである.本研究では,自由度とゲーム性に着目し,「高自由度インタフェース」と「自由度増加インタフェース」を開発した.これらのインタフェースの有効性を検証するため,ショッピングモールにおいて,ロボットとの会話および遠隔操作体験を行うイベントとして実験を実施し,それぞれのインタフェースにおける操作者の操作に対する印象を調査した.また,操作者の笑いが生じた場面を定性的に分析し,楽しさを引き出す要素の特定を試みた.その結果,両インタフェースとも操作者の楽しさを引き出せていたことが分かり,第一の目的は達成された.また,匿名性による気軽さ,操作自由度の適度な制限,操作グループ内での体験の共有という3つの要素が操作者の楽しさを引き出すために重要な要素となりうることが示唆され,第二の目的も達成された.本研究は,接客ロボットの遠隔操作における操作者の楽しさという観点からの新たな知見を提供するものである.今後,この知見に基づいて,より広範な分野で応用され,インタフェース設計における操作者の積極性や楽しさの向上によって,次世代のより豊かなユーザ体験が提供されることを期待する.
謝辞 本研究は,JSTムーンショット型研究開発事業(JPMJMS2011)の助成を受けて実施された.本実験を進めるにあたり,ららぽーとEXPOCITYには多大なご協力を頂きました.また,石川怜氏,高橋幸里氏,兵頭佳氏には実験にご協力頂きました.心より御礼申し上げます.
参考文献
- [1] Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R. and Hayashi, K.: Pepper learns together with children: Development of an educational application, 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), IEEE, pp.270–275 (2015).
- [2] 山崎晶子,荻野 洋,山崎敬一,葛岡英明:科学博物館における身体ひねりを用いたロボット(TalkTorque-2)と観客との相互行為の分析,電子情報通信学会論文誌D,Vol.97, No.1, pp.28–38 (2014).
- [3] Kuno, Y., Sadazuka, K., Kawashima, M., Yamazaki, K., Yamazaki, A. and Kuzuoka, H.: Museum guide robot based on sociological interaction analysis, Proceedings of the SIGCHI conference on Human factors in computing systems, pp.1191–1194 (2007).
- [4] 窪田智徳,磯和隆道,小川浩平,石黒 浩:人と共働する近接操作型アンドロイドロボットの開発と実店舗での検証,ヒューマンインタフェース学会論文誌,Vol.22, No.3, pp.275–290 (2020).
- [5] Kanda, T., Shiomi, M., Miyashita, Z., Ishiguro, H. and Hagita, N.: A communication robot in a shopping mall, IEEE Transactions on Robotics, Vol.26, No.5, pp.897–913 (2010).
- [6] Iwasaki, M., Ikeda, M., Kawamura, T. and Nakanishi, H.: State-transition modeling of human-robot interaction for easy crowdsourced robot control, Sensorsm, Vol.20, No.22, p.6529 (2020).
- [7] Shiomi, M., Shinozawa, K., Nakagawa, Y., Miyashita, T., Sakamoto, T., Terakubo, T., Ishiguro, H. and Hagita, N.: Recommendation effects of a social robot for advertisement-use context in a shopping mall, International Journal of Social Robotics, Vol.5, pp.251–262 (2013).
- [8] 石 超,佐竹 聡,神田崇行,石黒 浩:客引きロボット導入に向けた社会実験,日本ロボット学会誌,Vol.35, No.4, pp.334–345(オンライン),DOI: 10.7210/jrsj.35.334 (2017).
- [9] 武内一晃,畑田裕二,山崎洋一,吉藤健太朗:分身ロボット「OriHime」を用いた外出困難者の遠隔接客に関する実証実験,情報処理学会論文誌デジタルプラクティス(TDP),Vol.5, No.2, pp.10–19 (2024).
- [10] Toda, A. M., Klock, A. C., Oliveira, W., Palomino, P. T., Rodrigues, L., Shi, L., Bittencourt, I., Gasparini, I., Isotani, S. and Cristea, A. I.: Analysing gamification elements in educational environments using an existing Gamification taxonomy, Smart Learning Environments, Vol.6, No.1, pp.1–14 (2019).
- [11] 井上明人:ゲーミフィケーション:ゲームがビジネスを変える,NHK出版(2012).
- [12] Feng, W., Tu, R. and Hsieh, P.: Can gamification increases consumers' engagement in fitness apps? The moderating role of commensurability of the game elements,Journal of Retailing and Consumer Services, Vol.57, p.102229 (2020).
- [13] Zainuddin, Z., Shujahat, M., Haruna, H. and Chu, S. K. W.: The role of gamified e-quizzes on student learning and engagement: An interactive gamification solution for a formative assessment system, Computers & education, Vol.145, p.103729 (2020).
- [14] Nouchi, R., Taki, Y., Takeuchi, H., Hashizume, H., Nozawa, T., Kambara, T., Sekiguchi, A., Miyauchi, C. M., Kotozaki, Y., Nouchi, H. et al.: Brain training game boosts executive functions, working memory and processing speed in the young adults: a randomized controlled trial, PloS one, Vol.8, No.2, p.e55518 (2013).
- [15] Petraki, E. and Nguyen, H. H. P.: Do Asian EFL teachers use humor in the classroom? A case study of Vietnamese EFL university teachers, System, Vol.61, pp.98–109 (2016).
- [16] Fredrickson, B. L.: The role of positive emotions in positive psychology: The broaden-and-build theory of positive emotions., American psychologist, Vol.56, No.3, p.218 (2001).
脚注
- *1 https://www.vstone.co.jp/products/sota/
- *2 https://musmus.main.jp/bgm.html
- *3 https://www.springin.org/sound-stock/category/bgm/
- *4 https://kirakira-soundeffect.com/soundeffect8.php
- *5 https://otologic.jp/free/se/pc-mouse01.html
- *6 https://soundeffect-lab.info/sound/button/
- *7 https://mitsui-shopping-park.com/lalaport/expocity/

2024年名古屋大学工学部卒業.現在,名古屋大学大学院工学研究科博士前期課程.ヒューマンロボットインタラクションに興味を持つ.

2016年同志社大学理工学部機械システム工学科卒業.2018年大阪大学大学院工学研究科知能・機能創成工学専攻博士前期課程修了.2021年同大学大学院工学研究科知能・機能創成工学専攻博士後期課程修了.同年より,同大学大学院基礎工学研究科システム創成専攻特任助教.博士(工学).ヒューマンロボットインタラクションに興味を持つ.
2022年大阪大学大学院基礎工学研究科博士後期課程修了.同年,名古屋大学大学院工学研究科特任助教,2023年より同助教.博士(工学).ヒューマンロボットインタラクションに関する研究に従事.

2014年京都大学大学院情報学研究科博士前期課程修了.修士(情報学).同年,株式会社サイバーエージェントに入社.2017年より同社AI Lab対話エージェントグループの主任研究員として大阪大学との共同研究講座を運営.接客における対話インタラクション,遠隔操作ロボットの研究に従事.

1988年京都大学大学院工学研究科博士後期課程研究指導認定退学.京都大学工学部助手,北陸先端科学技術大学院大学情報科学研究科助教授,京都大学情報学研究科助教授を経て,2005年より名古屋大学大学院工学研究科教授.博士(工学).言語処理学会,人工知能学会,日本認知科学会,ACM各会員.

2010年公立はこだて未来大学博士課程(後期)修了.システム情報科学博士.その後,ATR知能ロボティクス研究所,大阪大学大学院基礎工学研究科講師等を経て,2019年より名古屋大学大学院工学研究科准教授.専門は,知能ロボット学,ヒューマンエージェントインタラクション等.2001年ヒューマンインタフェース学会論文賞受賞.2017年文化庁メディア芸術祭アート部門優秀賞受賞.
採録日 2025年7月8日