Bluetooth Meshによる自律分散型避難誘導システム
Autonomous Decentralized Evacuation System using Bluetooth Mesh
1. まえがき
火災などの災害状況は時々刻々と変化するため,それに応じて適切な避難誘導を行うシステムが必要となる.これらには危険箇所を把握し,安全な経路を避難者に提示する機能が求められる.よって,センサネットワークを用いて災害状況を収集し,危険箇所を避けた避難経路を計算,提示するシステムが提案されている.これらのシステムの多くはサーバによる集中制御のために耐障害性が低いことや,利用する通信規格の汎用性に課題があった.
そこで本研究ではBluetooth Meshによりセンサネットワークを構成し,災害状況に応じて動的に避難経路を求め,LEDによる誘導を行う自律分散型のシステムを提案する.これにより,PCやスマートフォンなどのデバイスからシステムにアクセスする拡張性が得られる.また,自律分散型とすることで,単一障害点を解消し耐障害性の高いシステムとした.提案システムを実際の建物に設置し,避難経路動作を確認することで実現可能性を検証する.
2. 関連研究
2.1 避難誘導システム
本研究では避難誘導システムの形態を,中央集権型と自律分散型の2つに大別して考える.この2つのシステム形態のイメージを図1に示す.中央集権型のシステム(図1(a))では,各ノードがサーバへデータを送り,サーバは受け取ったデータを集約し,処理する.そのデータを元にサーバはノードへ指示を送ることでシステムが動作する.自律分散型のシステム(図1(b))では,各ノード同士でデータのやり取りを行う.そのデータを元に各ノードが自律して動作を決定する.
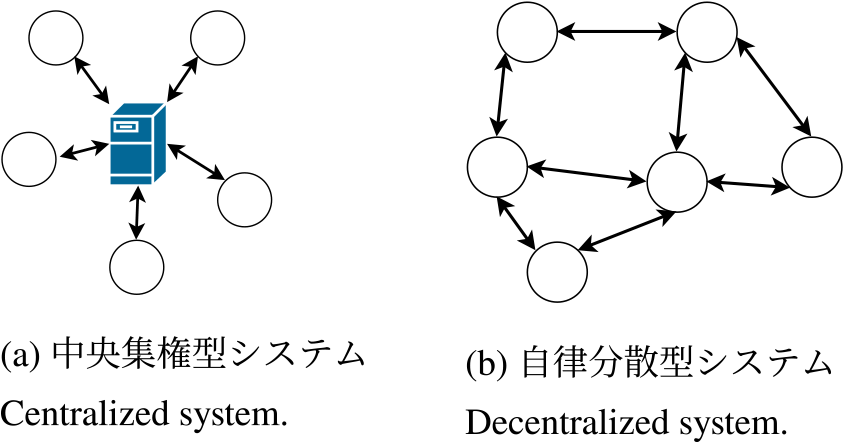
Fig. 1 Comparison of system types.
中央集権型のシステムでは,高性能なサーバにデータを集約し,処理することができるが,サーバが故障するとシステム全体が動作しなくなってしまう欠点がある.一方,自律分散型のシステムでは,一部のノードが故障しても,残りの動作するノードでシステムを運用することができ,耐障害性が優れている.
文献[1]ではビーコン信号をモバイル端末が受信,位置推定を行い,安全な場所へ誘導するシステムが提案されている.文献[2]では各所に配置されたセンサから炎や煙などの災害情報を取得し,WiFiネットワーク経由でユーザの端末に通知,避難誘導経路を表示している.文献[3]では通路や出口の定員,通路の長さ,グループの人数を総合的に考慮して総避難時間を抑える避難誘導システムが提案されている.また,屋内位置推定を備えたAndroid端末によるプロトタイプがされている.文献[4]では避難誘導の情報をサーバからAndroid端末に送信しプロジェクターで避難方向を表示している.文献[5]では隣接するノード同士でZigbeeを用いて通信し避難経路を計算し,サーバを介して避難者の端末に避難方向を提示している.これらの研究ではセンサデータや避難方向をサーバに集約し,そのデータをもとに各デバイスに避難誘導についての指示を行う中央集権型のシステムとなっている.
中央集権型のシステムではサーバが単一障害点となり,サーバに故障が起きるとすべてのシステムが機能しなくなってしまう.よって,災害に対する耐障害性に課題があるシステムである.
そこで分散型の避難システムが提案されている[6]-[8].この文献[6]では,シミュレーションでの評価にとどまっており,実際にセンサネットワークを構成する通信方式や,避難誘導を行う表示系を含めた実装については検討していない.文献[7]では無線LAN(WiFi)を用いて自律分散型の避難誘導システムの提案がされており,サーバを用いないことで費用や運用面での扱いやすさがあると述べられている.アルゴリズム的には自律分散型であるが,アクセスポイントが故障した場合には全システムが機能しなくなるため,単一障害点を持っている.単一障害点を持つシステムは災害時の耐障害性に問題がある.
2.2 通信方式
避難誘導システムにおいて情報をやり取りするセンサネットワークの通信方式について着目する.文献[2], [4], [7]では無線LAN(WiFi)を使用している.WiFiはZigbeeやBluetoothと比較して10倍以上の電力を消費する[9].避難誘導システムでの通信は,主に危険か否か,センサの値がどれくらいかのデータである.よって,高いビットレートは不要であり,WiFiはZigbeeやBluetoothと比較して効率が悪い.
文献[5], [8]ではZigbeeでセンサネットワークを構成している.Zigbeeによるセンサネットワークの実装ではメディアアクセス制御の相性が悪いことが示唆されており,1回の通信が失敗するとシステム全体に大きな影響が及ぶ問題が挙げられている[8].また,この規格はPCやスマートフォンなどの広く普及しているデバイスには搭載されていない.よって,システムのセットアップには専用の端末が,センサの状況をスマートフォンなどの外部デバイスから直接取得することができず,汎用性,拡張性に課題がある.
3. 提案システム
本研究では先に述べた問題を解決するために,デバイス間との通信にBluetooth Meshを用いて自律分散型の避難誘導システムを提案する.Bluetooth MeshはBLE(Bluetooth Low Energy)を基盤とし,多対多のデバイスでの通信に最適化された規格であり[10],単一障害点を持たない自律分散型の災害に強いシステムを構築できる.この通信規格は周囲のノードにメッセージをブロードキャスト,それを受け取ったノードがさらにブロードキャストを繰り返し,各ノードがメッセージを中継することで,直接到達できない範囲にもメッセージを送ることができる.ノードには16 bitのアドレスが付与され,規格としては約32万台のノードを使用することができる.また,BLEはスマートフォンやタブレット,PCといった端末のほぼすべてに搭載されていることから,多様なデバイスとの協調が見込める汎用性,拡張性を持つ.そのため,専用のデータなどを開発者のPCから書き込まずに,スマートフォンなどの端末のアプリケーションからセンサネットワークのセットアップを行うことができる.また,災害時には避難者の端末からセンサネットワークにアクセスし,危険箇所と避難経路を提示するということも可能である.これらの利点があるが,この規格を用いた避難誘導システムは現在提案されていない.
本研究で提案する避難誘導システムの概要について述べる.本システムは図2のように,屋内の各所に設置したセンサノードでBluetooth Meshによるセンサネットワークを構成する.避難経路は重み付きのグラフとして表現し,火災などの危険の状況によってリンクの重みを変化させる.各ノードは自身の位置から出口までの安全な経路を計算し,避難者が行くべき方向を指示する.各ノードはセンサの値が一定値を超えると,危険検知状態としてセンサネットワーク内に自身の位置が危険であることを通知する.取得したデータをもとに避難方向をマトリクスLEDで矢印を表示することで指示する.
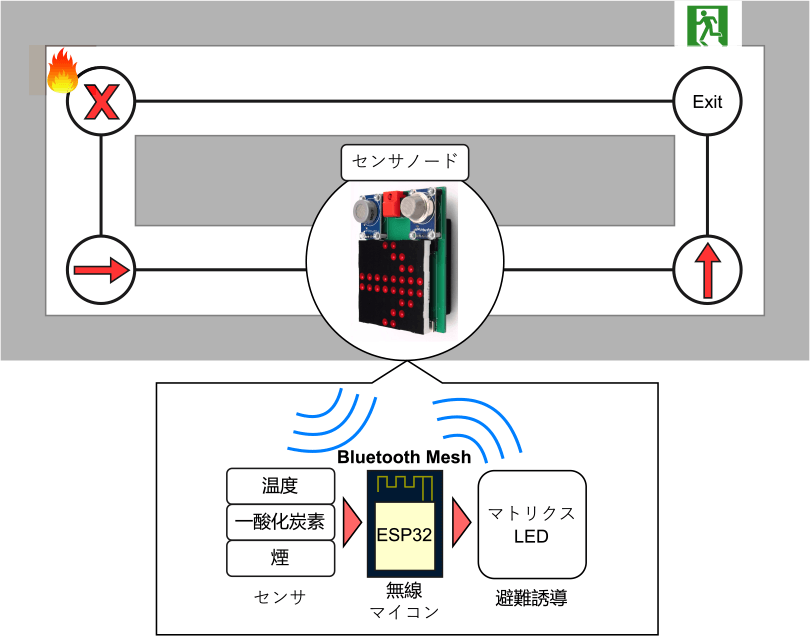
Fig. 2 Overview of the system, which represents the evacuation route as a graph, provides sensing, wireless communication using Bluetooth Mesh, route calculation and guidance.
各ノードが以上の動作を行う自律分散型のシステムとすることで,単一障害点を解消した.また,Bluetooth Meshによりセンサネットワークを構成することで,他デバイスとの協調が可能な汎用性,拡張性が得られる.
センシング,Bluetooth Meshによる無線通信,避難経路計算,避難誘導の機能をひとつのセンサノードとしてまとめ,実装した.このデバイスを複数個接続し,自律分散型の避難誘導システムを構成した.
3.1 避難経路の表現と算出
避難経路は,センサノード間を重みを持ったリンクで接続した有向グラフG=(V, E)で表現する.なお,このグラフが表す接続関係は,センサノード間を結ぶ通路,人が通行する避難経路であり,センサネットワークのパケットの経路ではない.センサノードの集合を\[ V = \{ v_1, \ v_2, \ \ldots ,\ v_n \} \](1)
ノード間を接続するリンク,すなわちノード間の通路の集合を
E={(vi, vj) | viからvjへの有向リンク}(2)
とする.ノードviの隣接リストLiは\[ L_i = \{ v_j \ | \ (v_i, \ v_j) \in E \} \](3)
となる.ノード間にリンクがあれば,人が行き来することができる通路があり,リンクがなければ壁や天井などを挟んでいるために人が直接行き来することができない位置関係であることを表す.
ノード間をつなぐリンクには重みを持たせる.ノードviへ向かうリンクの重みをwiとする.重みは通行不可とするときに無限大とする.平常時の重みはノード間の距離などに応じた値を設定する想定である.センサノードviが危険を検知すると,ネットワーク内のすべてのノードへ通知し,各ノードが保持しているグラフのうちセンサノードviへ向かうリンクの重みwiが無限大となる.よって,経路計算の際に危険な場所に向かわないように経路から除外される.センサノードvi自体に重みを持たせるとノードに重みのあるグラフとなり,一般的な最短経路アルゴリズムを適用できなくなるので,行き先ノードの状態とリンクの重みを紐づける形にした.
提案システムでは,図3のように各センサノードに隣接ノードのアドレス(16 bit)を格納する隣接リストと,出口に配置するノード(出口ノード)であるかを表す値を持たせる.これらのデータをここではNodeInfoと呼ぶ.図3中心のノード(0xAAAA)に着目すると,上方向にあるノード(0x1111),右方向にあるノード(0x2222),下方向にあるノード(0x3333),左方向にあるノード(0x4444)を隣接リストLに配列として格納している.隣接リストLのインデックス0,1,2,3が,避難指示をする際の矢印の上,右,下,左に対応している.たとえば中心のノード(0xAAAA)からノード(0x1111)へ誘導する場合には,対応する隣接リストのインデックスが0番であることから,上方向を指示する.ノード(0x2222)は出口に配置するノードであり,避難経路を算出する際の目的地候補である.出口ノードではNodeInfoのExitプロパティをTrueとする.このような隣接リストと出口ノード属性のデータNodeInfoを各ノードに割り当て,各々がそのデータをネットワーク内のデバイス全体を表すアドレス(0xFFFF)に送信することで,ブロードキャストして共有する.それを各ノードが受信し,隣接リストから避難経路のグラフを構成する.この避難経路を表すグラフのデータを各ノードが保持し,受信したデータや危険検知状態に応じて更新する.
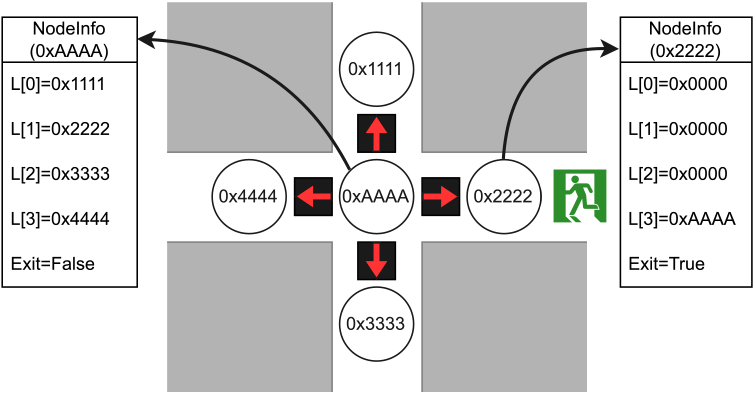
Fig. 3 Assignment of adjacency list and node attributes.
避難経路を表すグラフを用いて,危険な箇所を避けながら現在地から出口まで誘導する経路は最短経路問題として考えて求める.本システムの経路計算においては,各センサノードが自身から出口までの最短経路が分かればよい.また,リンクの重みは正の値であり,負の重みは不要である.よって,本システムではダイクストラ法を用いて出口までの重みの合計が最小になる避難経路を求める.複数の出口が存在する場合は,重みの合計が最小になる出口を選択する.
3.2 センサノード
本研究では災害の状況を監視するセンサノードを作製した.作製したセンサノードを図4(a),図4(b)に示す.屋内の火災に焦点を当て,温度,煙,CO(一酸化炭素)センサを搭載した.また,手動で危険検知状態とするためのボタンも搭載した.プロセッサとしてESP32-S3-WROOM-1-N16R8を用いた.ESP32-S3はEspressif Systems社によって開発されたデュアルコア32 bit 240 MHzのSoC(System on a Chip)であり,WiFiとBluetoothの無線規格に対応する[11].本研究ではBluetoothの機能を用いてセンサネットワークを構成する.ファームウェアはUSBコネクタから書き込む.各ノードからのデータから経路算出をし,避難誘導を行う方向はマトリクスLEDで示す.
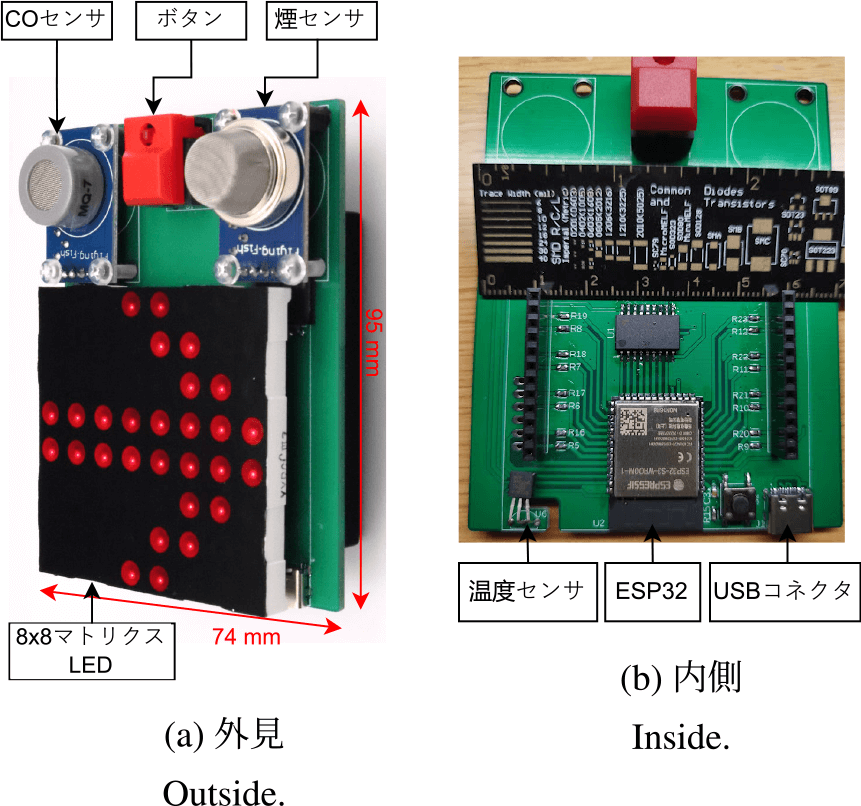
Fig. 4 Sensor node.
センサノードの動作フローチャートを図5に示す.Core0ではデータ収集,通信,経路計算を行い,Core1ではマトリクスLEDの制御を行う.Core0は起動後にBluetoothや設定の読み出しなど周辺機器の初期化を行う.その後,センサデータを収集し,状態に変化があったときまたは,5秒ごとにセンサの状態をネットワーク内のすべてのノードに送信する.また,隣接リストとノード属性の情報(NodeInfo)をネットワーク内のすべてのノードに30秒ごとに送信する.他ノードからのデータを受信をするたびに,各ノードは内部で保持しているグラフの更新と経路計算を行う.以上のセンサデータ収集から経路計算の処理を繰り返す.ノードが動作しなくなった際には,危険状態を表すデータを送信しなくなる.一定時間危険状態を示さなかったノードは,各ノードが保持しているグラフのデータから削除され,経路として除外される.
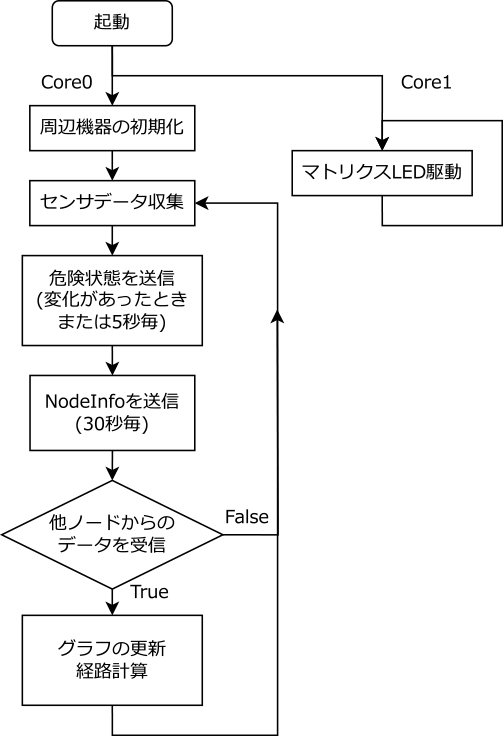
Fig. 5 Flowchart of sensor node operation.
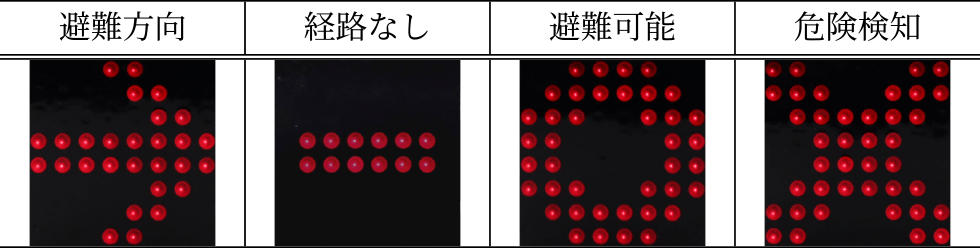
LEDの表示は表1のように避難方向を矢印で表し,安全な経路が無ければ指示をせず,危険検知をしているノードはバツを表示する.また,使用可能な出口ノードではマルを表示する.
Table 1 Indication of matrix LEDs.
センサノードは最低1台の他ノードと通信できる範囲の建物内の壁に貼り付けて設置する.図6に建物内の地図の一部を想定した避難経路と,出口,分岐点,1本道,曲がり角についてのノードの設置ルールを示す.出口は避難経路の計算での目的地となるので,設置が必須である.分岐点では2,3方向のうちどの方向へ進むべきか,あるいは戻るべきかを示すために設置が必須である.1本道や曲がり角では任意であるが,設置することで詳細に危険検知ができる.また,グラフ上で隣接しているセンサノード同士は互いに直接信号が届く範囲に配置し,ネットワークの分断が起こらないようにするべきである.
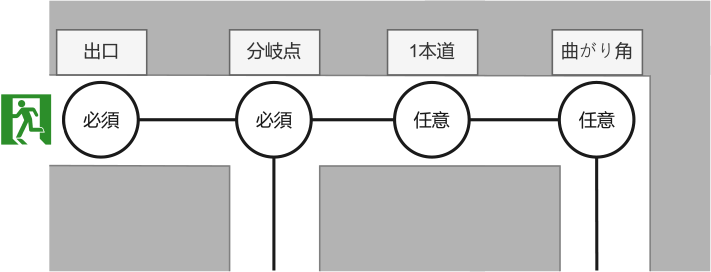
Fig. 6 Installation rules for sensor nodes.
4. 動的避難誘導の動作確認
開発したセンサノード5台を図7のように並べ,センサネットワークを構成し,動的避難誘導の動作確認を行った.ノードの隣接リストや属性,アドレスは初期に手動設定した.また,危険検知をしていない平常時のリンクの重みは1とした.
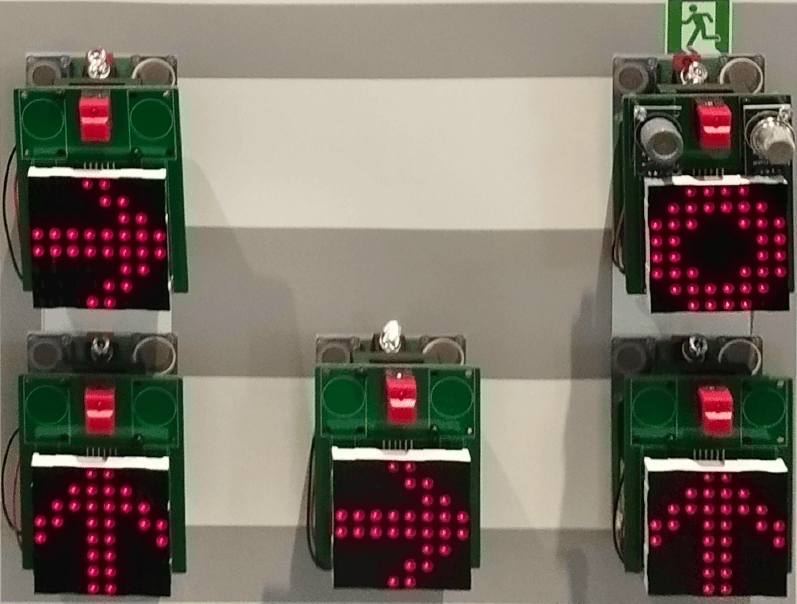
Fig. 7 Five placed sensor nodes.
図8に想定する屋内地図とノードの配置,各ノードが指示した矢印の方向を示す.ノード1からノード5の5台で環状に繋がった経路を想定している.また,ノード5を出口ノードとしている.この状態ではセンサネットワーク内に危険検知箇所は無いため,すべてのリンクの重みは1である.よって,ノード1はノード3,ノード5という経路をたどっている.他のノードも含め,重みの合計が最小となる経路を示していることが分かる.
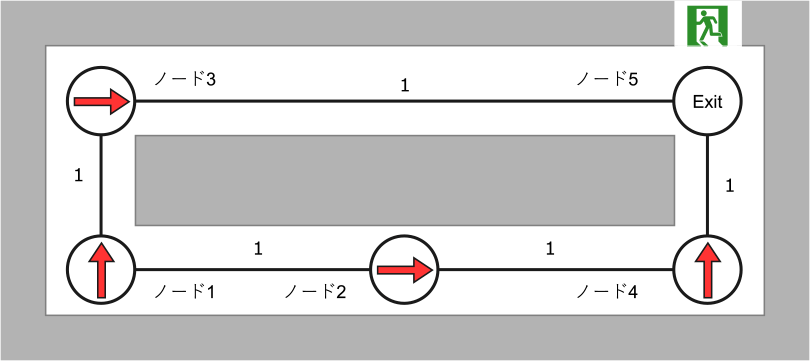
Fig. 8 Evacuation guidance in five nodes.
次に図8の状態から,ノード3を危険検知状態とし,各ノードの避難誘導方向を検証した.図9に各ノードが指示した矢印の方向を示す.図8ではノード1はノード3へ向かう方向を指示していたが,図9ではノード2の方向を指示した.ノード3が危険検知したことで,ノード3につながるリンクの重みは無限大となる.よって,ノード1は危険検知した箇所を避けて出口ノードに誘導する経路を示すことができている.
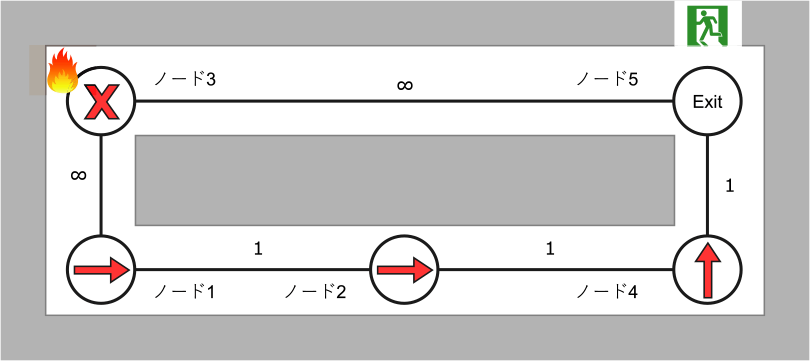
Fig. 9 Evacuation guidance when one node out of five is in a hazard detection state.
また,出口ノードを危険検知状態とした図10では,すべてのノードが方向指示を停止した.このように,安全に避難できる経路が存在しなくなった場合には避難誘導動作を停止することが確認できた.ここで,ノード2をあらたに出口ノードとして設定した際の動作を図11に示す.危険検知していないノード1,3,4は,利用可能な出口ノード2へ向かう経路を指示した.よって,出口が危険な状態になり,安全な経路が存在しなくなっても,外部から本システムにアクセスして新たに避難口を設定,誘導できることが分かった.この状況としては安全な避難が困難な際に,窓などからの救助を行うものを想定している.
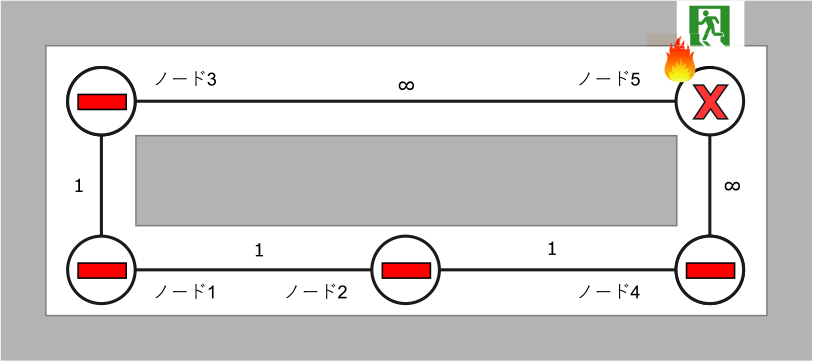
Fig. 10 Indication when the exit node is in a hazard detection state.
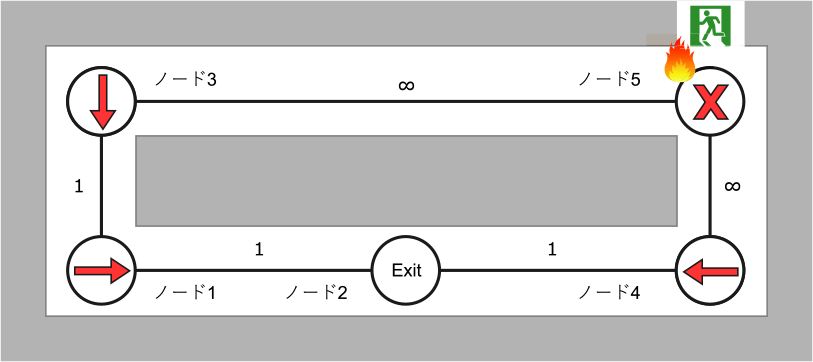
Fig. 11 Evacuation guidance when one new node is set as an exit node.
5. 建物での動作確認
実際の建物にセンサノードを設置し,センサを危険検知状態にして避難経路が動的に変化することを確認する評価実験を行った.今回は東京都立大学日野キャンパス6号館3階で実験を行った.センサノードは図12のように壁に貼り付けて設置した.出口ノード3台,通常ノード6台の計9台を配置し,それぞれの経路指示状態を確認した.4章と同様に,ノードの隣接リストや属性,アドレスは初期に手動設定した.また,危険検知をしていない平常時のリンクの重みは1とした.なお,建物での動作確認では,壁に貼り付けた状態で,表示が意味する方向が屋内地図(図13)と一致するように隣接リストを割り当てた.
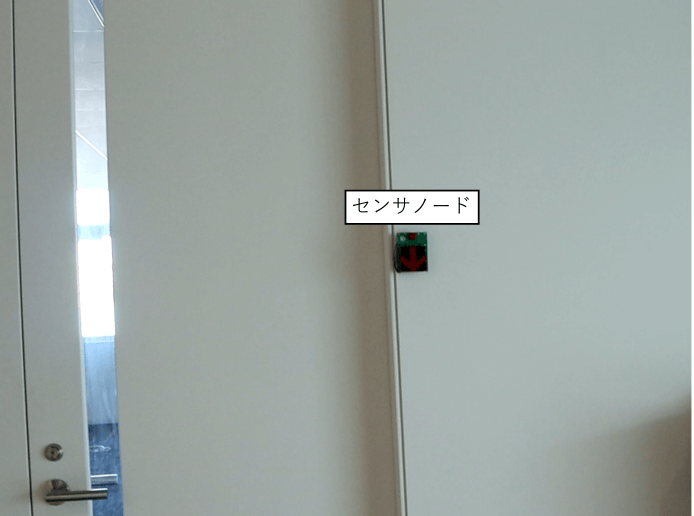
Fig. 12 Sensor node placed in the building.
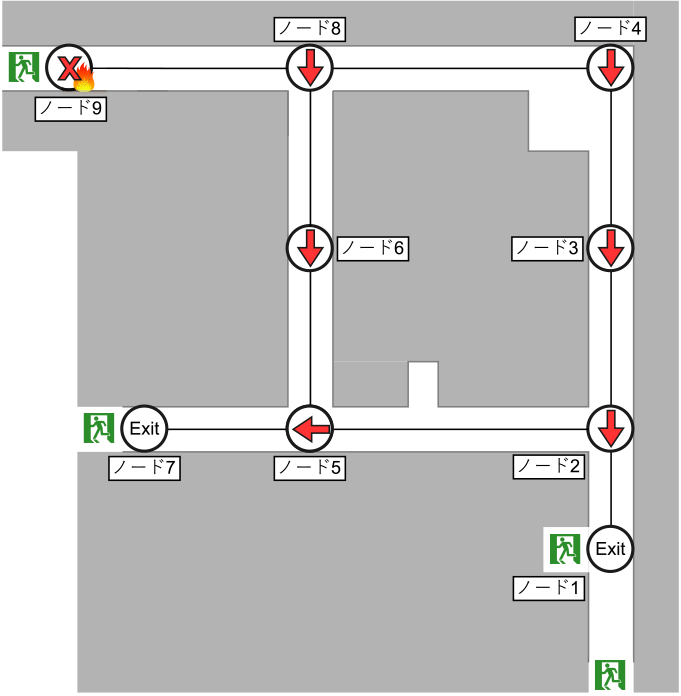
Fig. 13 Operation when one node is in a hazard detection.
5.1 危険検知した際の避難誘導動作
図13にノード9を危険検知状態としたときの,各ノードの指示を示す.ノード4に着目すると,平常時は経由ノード数が少なくなるノード8,9の順で出口(ノード9)まで向かう指示をするが,ノード9を避けた経路3,2,1で出口(ノード1)まで誘導していることが分かる.
次に,図13の状態から,図14のようにノード5を危険検知状態とした.図15のように,ノード5は避難経路指示を行っていたが,危険検知したことでバツ印を表示している.ノード5が危険検知したことで,図16のようにノード8は経路6,5,7から経路4,3,2,1を指示していることが分かる.以上のことから,実装したシステムで各ノードが危険検知したノードを避けた出口までの安全な経路を動的に求め,指示できることが確認できた.
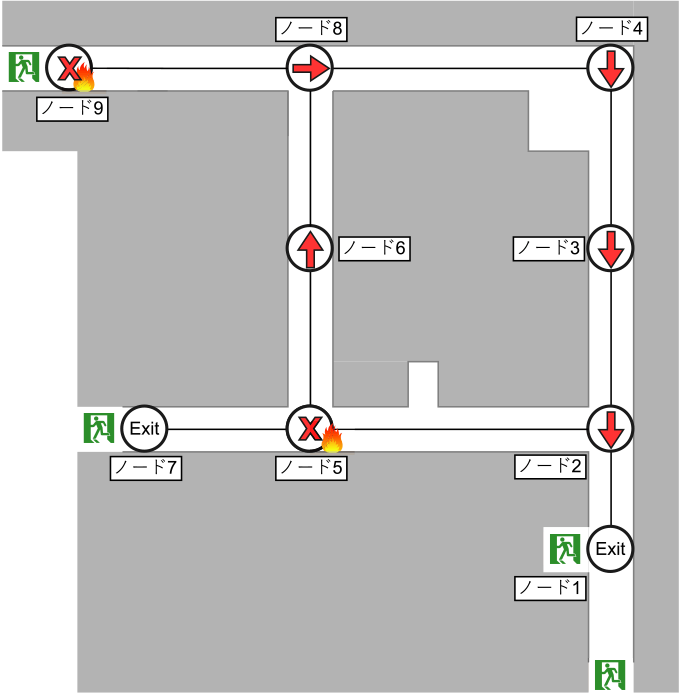
Fig. 14 Operation when two nodes are in a hazard detection.
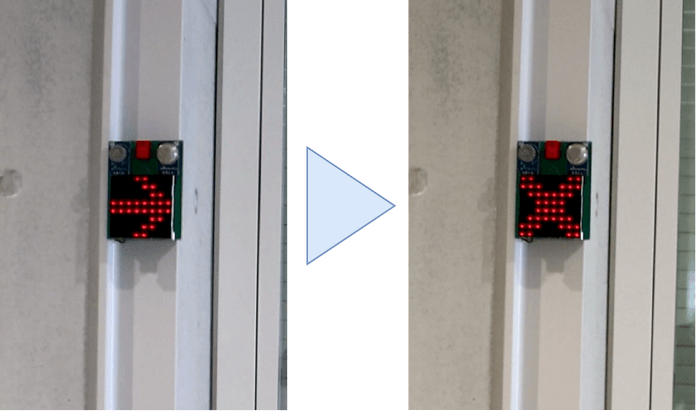
Fig. 15 Transition of route guidance at node 5.
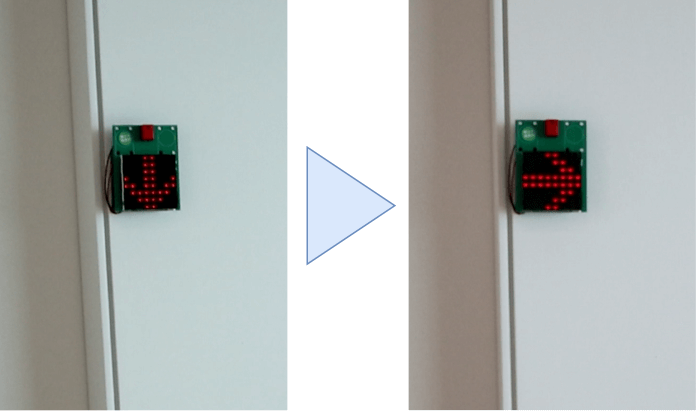
Fig. 16 Transition of route guidance at node 8.
5.2 ネットワーク性能の評価
実際の建物で構成したセンサネットワークにおいてのノード間のRTT(Round Trip Time)とPDR(Packet Delivery Ratio)を測定した.表2にノード9から各ノードへパケットを100回ずつ送受信した際の平均RTT,平均PDRを示す.ネットワーク全体での平均RTTは190.4 ms,PDRは98.5%と避難誘導を行ううえでは十分な性能が得られたと考える.
Table 2 RTT and PDR of each node from node 9 installed in the building.

ノード9の直近にあるノード8のRTTは120 msとなっているが,ノード2のRTTは241 msとノード8に対してのものより2倍ほど大きくなっている.ノード9から2までは図14から分かるようにノード8より遠く,他ノードに中継してもらう必要がある.よって,ノード2のRTTがノード8よりも高くなったこの結果は妥当である.
6. 実際の運用に向けて
本システムを防災設備として導入するに向けての考察を述べる.災害時に屋内からの避難するべき方向を示す法定設備として,誘導灯がある[12].本システムにおける方向指示をするノードは通路誘導灯,出口に配置するノードが避難口誘導灯に相当する.通路の方向を提示する通路誘導灯では,一番小さいC級の場合,誘導灯までの距離が10 m以下となるように定められており,表示の輝度は5 cd以上と定められている[12].今回の検証では,Bluetooth Meshを用いたシステムで避難経路算出という点での運用可能性に焦点を当てたので,表示は簡易的にマトリクスLEDを用いたが,実際の設備として運用するためには,これらの仕様を満たし,災害時に十分な視認性を保証する必要がある.
避難者が安全に通ることができないような温度では,危険検知状態になって通行不可を示すか,故障して動作しなくなり方向指示を行わず,ネットワーク内の経路から除外される.しかし,避難者が通っても重大なやけどを負うことはない通行可能な温度の範囲でセンサノードが故障し,通行不可と判定されることは防ぐ必要がある.一般に70℃以上では約1秒でやけどをするとされているので,センサノードには,そのような環境でも動作可能な耐熱性が必要である.
避難者が多数いることを想定した通信性能への影響についての検証も必要である.Bluetoothが使用する2.4 GHzの電波は,伝送路に人体がある場合には減衰する[13].信号が減衰すれば,PDRが低下したり,メッセージが到達しなくなり,ネットワークが機能しなくなってしまう.そのため,隣接するセンサノード間に多数の避難者がいる場合にも十分に信号が到達できるような間隔で配置をする必要がある.
7. おわりに
本研究ではBluetooth Meshを用いて自律分散型の避難誘導システムを構成した.これによって中央集権型の従来研究に対して耐障害性のある災害に強いシステムとすることができた.また,ZigbeeやWiFiといった規格に対して汎用性,拡張性という優位点を挙げた.災害を検知する温度,煙,COセンサと,Bluetooth Meshの通信を行うESP32,表示機としてマトリクスLEDを搭載したセンサノードを作製し,自律分散的に避難誘導を行うことができることを確認できた.また,実際の建物でセンサネットワークを構成し,危険箇所を想定したノードを避けて誘導ができ,本提案システムの実現可能性を確認することができた.
最後に提案システムの今後の課題について述べる.課題のひとつとして,センサネットワークをセットアップしたり,センサデータや避難経路を提示する専用アプリケーションの実装がある.これにより利便性を向上できるとともに,Bluetoothを搭載する他のプラットフォームからシステムにアクセスすることができるという拡張性を活かすことができる.
実装したシステムでは,バッテリについて考慮しておらず,火災報知器のように年単位の動作はできない.起動後から常にセンサの状態を共有するのではなく,いずれかのノードが災害の発生を検知するまでスリープ状態とするなど,平常時と災害時でシステムの動作を切り替える仕組みが必要である.
駅などのより大規模な建物を想定してセンサノードを数十から数百個設置した場合での性能評価も必要である.デバイスが増えるほど,ネットワーク上を流れるパケットは多くなり,避難経路計算の計算量も増える.その場合でも十分なレイテンシで避難誘導動作を行えるかの検証をする必要がある.
複数の経路がある場合は最短経路のみでなく,複数経路を活用することで避難者を分散し,混雑を低減することができ,迅速な避難に繋げられる.各ノードから避難可能な経路が複数算出された場合には,複数方向を示す誘導方式を採用することも必要である.
参考文献
- [1] Inoue, Y., Sashima, A., Ikeda, T. and Kurumatani, K.: Indoor Emergency Evacuation Service on Autonomous Navigation System using Mobile Phone, 2008 Second International Symposium on Universal Communication, pp.79–85 (online), DOI: 10.1109/ISUC.2008.49 (2008).
- [2] Depari, A., Flammini, A., Fogli, D. and Magrino, P.: Indoor Localization for Evacuation Management in Emergency Scenarios, 2018 Workshop on Metrology for Industry 4.0 and IoT, pp.146–150 (online), DOI: 10.1109/METROI4.2018.8428343 (2018).
- [3] Chen, L. and Chung, J.: Mobility-Aware and Congestion-Relieved Dedicated Path Planning for Group-Based Emergency Guiding Based on Internet of Things Technologies, IEEE Transactions on Intelligent Transportation Systems, Vol.18, No.9, pp.2453–2466 (online), DOI: 10.1109/TITS.2016.2646380 (2017).
- [4] 大塚彩秀菜,塚田晃司:夜間の避難誘導を支援する懐中電灯型避難情報投影システムの提案,第82回全国大会講演論文集,Vol.2020, No.1, pp.57–58(オンライン),入手先〈https://cir.nii.ac.jp/crid/1050574047122736256〉 (2020).
- [5] 于 文嵐,古川智裕,宗 裕文,横山絵美里,岡崎直宣:センサネットワークを用いた避難誘導システムにおける動的避難経路生成手法の検討,宮崎大学工学部紀要,Vol.43, pp.183–188(オンライン),入手先〈https://cir.nii.ac.jp/crid/1050007314763144832〉 (2014).
- [6] Yaping, M., Hui, Z., Tao, C. and Rui, Y.: Decentralized Evacuation System Based on Occupants Distribution and Building Information, ISCRAM2015 Conference (2015).
- [7] 瀧本浩一,三浦房紀,松元隆博,関原 弦,組田良則,山本真吾:自律分散協調による避難誘導システムの開発,社会技術研究論文集,Vol.8, pp.82–90(オンライン),DOI: 10.3392/sociotechnica.8.82 (2011).
- [8] Barnes, M., Leather, H. and Arvind, D.: Emergency Evacuation usingWireless Sensor Networks, 32nd IEEE Conference on Local Computer Networks (LCN 2007), pp.851–857 (online), DOI: 10.1109/LCN.2007.48 (2007).
- [9] Lee, J., Su, Y. and Shen, C.: A Comparative Study of Wireless Protocols: Bluetooth, UWB, ZigBee, and Wi-Fi, IECON 2007 - 33rd Annual Conference of the IEEE Industrial Electronics Society, pp.46–51 (online), DOI: 10.1109/IECON.2007.4460126 (2007).
- [10] Woolley, M.: Bluetooth Mesh Networking, (2019). 〈https://www.bluetooth.com/wp-content/uploads/2019/03/Mesh-Technology-Overview.pdf〉 (Accessed on 12/5/2023).
- [11] Espressif Systems: ESP32-S3-WROOM-1 Datasheet, 〈https://www.espressif.com/sites/default/files/documentation/esp32-s3-wroom-1_wroom-1u_datasheet_en.pdf〉 (Accessed on 12/5/2023).
- [12] 総務省消防庁:消防法施行規則(令和6年12月13日施行),https://laws.e-gov.go.jp/law/336M50000008006.
- [13] Januszkiewicz, c.: Analysis of Human Body Shadowing Effect on Wireless Sensor Networks Operating in the 2.4 GHz Band, Sensors, Vol.18, No.10 (online), DOI: 10.3390/s18103412 (2018).

2022年東京都立産業技術高等専門学校卒業.2024年東京都立大学システムデザイン学部電子情報システム工学科卒業.東京科学大学大学院工学院情報通信系在学中.

1989年早稲田大学理工学部・工業経営卒業.1990年同大学大学院理工学研究科修士課程修了.同年日本電信電話(株)入社.1998~2000年通信・放送機構沖縄リサーチセンター研究フェロー,および早稲田大学国際情報通信研究センター客員研究員.2002年京都大学大学院情報学研究科・通信情報システム専攻助教授.2010年,首都大学東京(現在,東京都立大学)・システムデザイン学部教授,現在にいたる.通信ネットワークのトラヒック制御および設計に関する研究に従事.博士(国際情報通信学).IEEE,情報処理学会,日本OR学会各会員.
採録日 2025年4月8日