SECIモデルに基づくオンライン力覚技能伝承支援システムの開発
Development of Online Transfer Support System for Force Perception Skills Based on SECI Model
1. はじめに
近年,高齢化による熟練者の減少が進み,どのようにして熟練の技(技能)を技術化または体系化するのか,熟練者の暗黙知を形式知に変換できるのかが注目されている[1].また,東京都産業労働局によると,熟練者の退職に対する今後の対応として「若者へ技能伝承」と回答している中小企業は46.1%にも上っている[2].このような技能伝承問題に対する解決策として,様々な取り組みや研究が行われている.OJTとシミュレーションを融合した人材育成として,鋳物製品の製造工程を対象とした技能伝承の取り組みが行われている[3].近年では,人工現実感(VR)や拡張現実感(AR)を用いた教育法にも注目が集まっており,人工現実感(VR)を用いた組立作業訓練支援[4]やフライス盤加工における技能訓練支援[5],拡張現実感(AR)を用いた保守点検作業の教育支援装置の開発[6]も行われている.しかし,人工現実感(VR)のうち,人間の触覚または力加減(力覚情報)に関しては,医学教育のための手術シミュレータに関する研究[7],正確な文字筆記の習得を目指した筆圧評価の研究[8]や遠隔教示システムの品質評価の研究[9],力覚技能(熟達した力加減)の伝承のためのプレス加工用金型の保守作業時の力加減(力覚情報)の視覚化を用いた支援システム[10]も提案されているが,力覚技能を有する作業者(熟練者)の力加減(力覚情報)を遠隔地に居ながらオンラインで体感・共有したり,指導を受けたりすることのできるシステムはまだ一般的ではなく,その効果の検証も必要であると考えられる.
他方,知識はたった一人で活動している個人によってではなく,個人間の相互作用ならびに個人と環境の間の相互作用によって創られる[11]と言われている.相互作用は,実空間,バーチャル空間,それらの組み合わせで起きるものであり,特に,技能の習得・伝承においては同一時間に同一空間で相互作用することが重要であると考えられている[3], [12].また,SECIモデルとは,知識創造モデルのことであり,個人が持つ暗黙的な知識を暗黙知と呼び,「共同化」,「表出化」,「連結化」,「内面化」という4つの変換プロセスを経ることで,集団や組織の共有の知識である形式知となると考える理論を示すモデルである[13].「共同化」は共同体験などによって暗黙知を獲得・伝達するプロセスのことであり,「表出化」は得られた暗黙知を共有できるよう形式知に変換するプロセスのこと,「連結化」は形式知同士を組み合わせた新たな形式知を創造するプロセス,「内面化」は利用可能となった形式知をもとに個人が実践を行い,その知識を体得するプロセスのことである.SECIモデルを用いた研究は多分野で行われており,AIを活用した知識分類モデルの研究[14]や実企業での取り組み[15]が行われており,特にIT分野ではSECIモデルの「連結化」が進んでいる.鋳造技能伝承支援の研究[3]では,没入型仮想共有環境がSECIモデルの「内面化」を実現する例と考えられる.また,暗黙知である力加減(力覚情報)を視覚化することにより形式知に変換する支援システム[10]はSECIモデルに当てはめると「表出化」の例と考えられる.しかし,SECIモデルの4つのプロセスのうち,どのプロセスが力覚技能の伝承に効果があるのかについては比較されていない.
そこで本研究では,知識創造のプロセスであるSECIモデルに基づき,仮想で力覚技能の習得のためのオンライン支援システムを構築し,各プロセスを想定した教育を行った後の評価実験結果を比較することにより,SECIモデルのプロセスが非熟練者への力覚技能伝承の支援にどのような効果があるのかを考察した.さらに視覚提示の条件の違いによって力覚技能の習得に影響があるのかも考察した.なお,本研究では,将来的に実企業での使用を目的とし,力覚技能の必要な作業として,多様な形状および硬度が一定ではない対象物(原材料や製品)を対象とした検査作業や不良品の除去作業等を想定した.
2. オンライン力覚技能習得支援システムの構築
本研究では,SECIモデルに基づいた力覚技能の伝承支援手法を提案するために,非熟練者が力加減(力覚情報)を仮想で体感し,他者(熟練者)とオンラインで共有することのできる「共同化」を行うことができるシステムを構築した.なお,本研究では,熟練者はこのシステムを30時間以上使用してミスなく操作できる人とし,非熟練者はシステムの未経験者とした.また,力覚技能とは,熟練者が行う作業中の熟練した力加減を示すこととする.
2.1 システムの構成
本研究の主な使用機器の概要をまとめて表1に示す.なお,JINS社製の生体情報計測機器(JINS MEME)はシステムの有効性を評価するための眼球運動(眼電位)の計測に使用した.
Table 1 Overview of equipment used.
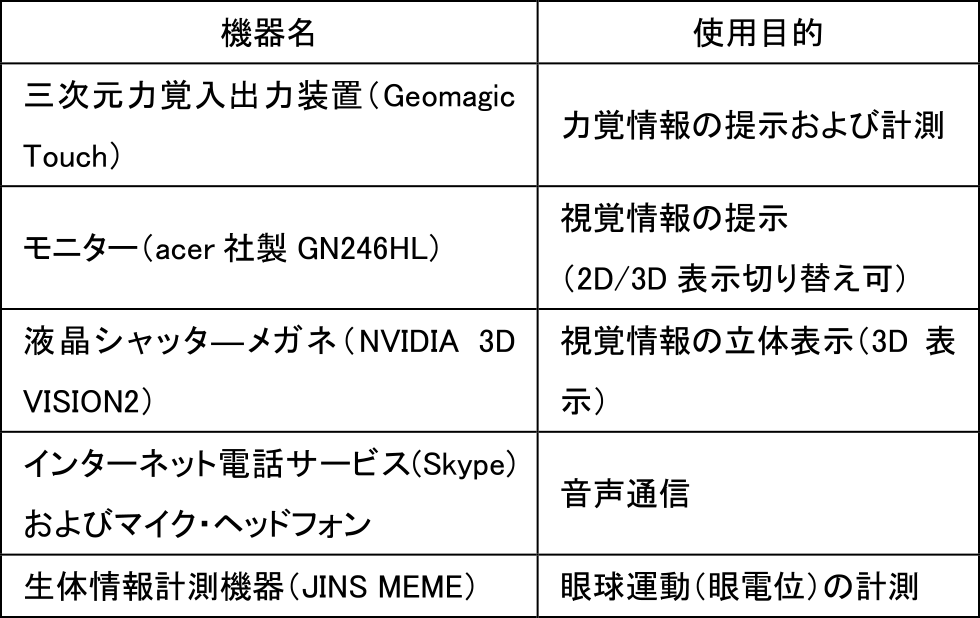
本研究では,仮想の力加減(力覚情報)を作業者に提示するためと実験時の力加減(力覚情報)を計測するための装置として,3D Systems社製の三次元力覚入出力装置(Geomagic Touch)を使用した.視覚情報(映像)を提示するために,通常表示(2D表示)と立体表示(3D表示)の切り替え可能なモニター(acer社製GN246HL)を使用し,立体的に表示する場合はNVIDIA社製の液晶シャッターメガネ(NVIDIA 3D VISION2)も使用した.三次元力覚入出力装置(Geomagic Touch)を用いて仮想の力加減(力覚情報)を感じながらモニターの画面に表示される対象物に作業を行うことを「内面化」プロセスと定義した.
また,本研究では,SECIモデルの「表出化」プロセスとして,音声ガイダンスによる説明を聞きながら,あらかじめ記録されている熟練者の作業時の力加減(力覚情報)を非熟練者が体感できるようにした.音声ガイダンスは熟練者が作成し,体感練習で示す熟練者の力加減(力覚情報)および動きのデータは三次元力覚入出力装置(Geomagic Touch)を用いて計測してcsv形式ファイルで記録し,画面モニター上での動きと同期して三次元力覚入出力装置(Geomagic Touch)により力加減(力覚情報)を再生できるようにした.さらに,「共同化」プロセスとして,非熟練者が作業中の力加減(力覚情報)を熟練者(本人以外の他者)とオンラインで共有できるようにするために,2台の三次元力覚入出力装置(Geomagic Touch)を使用した.非熟練者が操作する三次元力覚入出力装置(Geomagic Touch)をサーバー側とし,熟練者が操作する三次元力覚入出力装置(Geomagic Touch)をクライアント側と設定した.サーバー側の動きをクライアント側が体感することができ,非熟練者の動きをもとに熟練者が非熟練者に指導することができるようにした.このときの作業者間(熟練者と非熟練者)の音声通信にはMicrosoft社のインターネット電話サービスSkypeを使用した.なお,連結化された形式知は「説明書」であり,連結化するための複数種類の形式知とは,「説明書」に示した三次元力覚入出力装置の操作方法,仮想の風船の画面表示と三次元力覚入出力装置の関連,風船を割る方法(風船を割るためのペンの動かし方)であると考えている.
本研究におけるSECIモデルの各プロセス(知識創造のイメージ)を図1に示す.
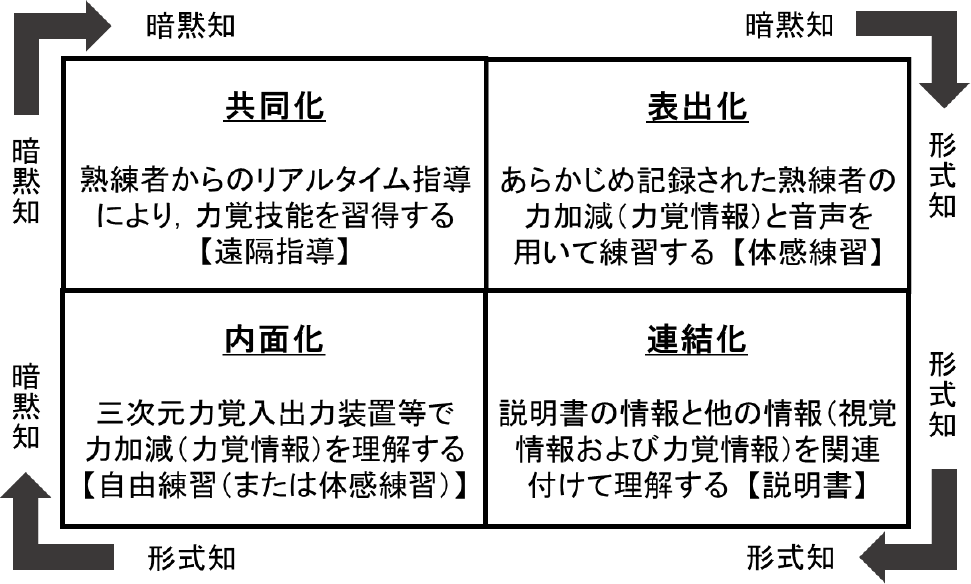
Fig. 1 Processes of the SECI model in this study.
2.2 システムの構成
本研究では,硬度が一定ではない対象物を対象とした検査作業や不良品除去作業等を想定した力覚情報の提示のために,仮想の風船割り作業を設定した.本研究の仮想の風船割り作業は,三次元力覚入出力装置(Geomagic Touch)を用いてモニターに表示される仮想オブジェクト(仮想の風船)に触れたり押したりすると力覚的反発を感じ,一定以上の力で押すと仮想の風船が割れる力覚的感覚を体感できるように,実物の風船割り作業を再現した.なお,正確な力加減ではない場合は,風船の表面をすべって風船を割ることができないようにした.
さらに,非熟練者の動き(力覚情報)をもとに熟練者が非熟練者に会話しながら指導することができるようにした.
本システムの使用時の様子を図2に示す.
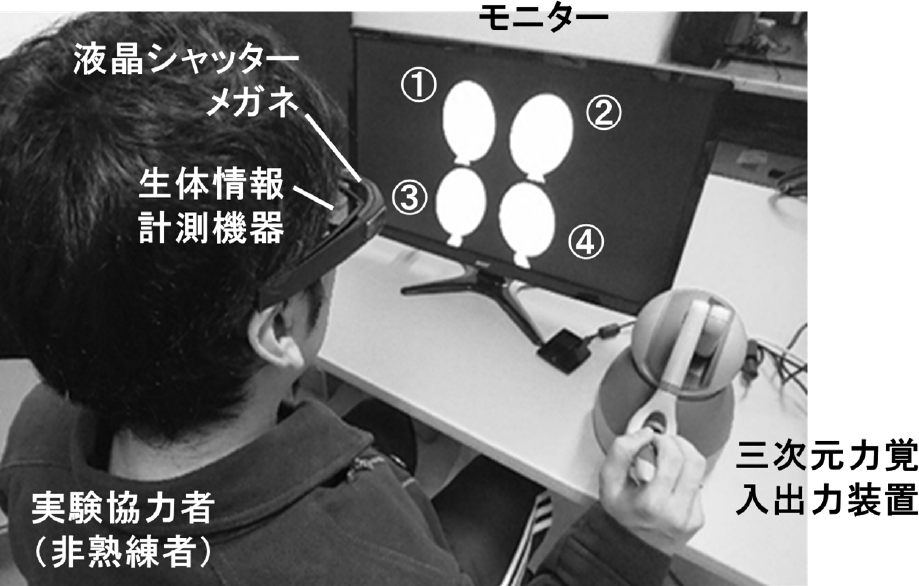
Fig. 2 Scenery of using conducted system.
3. 実験および分析方法
本研究で構築したシステムを使用して,SECIモデルに基づいた力覚技能伝承支援の手法の効果について調べるための実験を行い,作業時間および作業中の眼球運動等について考察した.
なお,本研究は,千葉工業大学「人を対象とする研究」に関する倫理審査委員会の承認を得て実施した.
3.1 実験条件
本研究では,できるだけ正確な力加減で風船を早く割ることができるようになることを目指して,熟練者の力加減を習得するための仮想の風船割り作業を行ってもらった.実験協力者が熟練者の作業中の力加減を音声説明とともに体験する練習を「体感練習」,離れた場所にいる熟練者と会話(音声通話)しながら行う練習を「遠隔指導」,練習後の仮想の風船割り実験を「評価実験」とした.
そして,実験条件はSECIモデルに基づき,図1に示したように「遠隔指導」を「共同化」,「体感練習」を「表出化」,実験の説明書(書面)を「連結化」,三次元力覚入出力装置(Geomagic Touch)を用いることを「内面化」として,以下の3条件とした.
- (1) 条件1
実験協力者は,説明書を用いながら仮想オブジェクトの風船を自由につついて割る練習である「自由練習」を行った後,「評価実験」を行う. - (2) 条件2
実験協力者は,熟練者が仮想オブジェクトの風船を割る動作を記憶させた三次元力覚入出力装置(Geomagic Touch)と音声ガイダンス(表2),モニター画面でのペンの動きを同時に再生して体感をする練習である「体感練習」を行った後,条件1と同じ「自由練習」を行い,「評価実験」を行う.体感練習では,モニター画面上の熟練者のペン(赤)に実験協力者のペン(緑)を重ねるとペンは白く表示され,正しい動きを行うことができているのかが視覚的に分かるようになっている.表2 音声ガイダンスの内容
Table 2 Voice guidance contents.
- (3) 条件3
実験協力者は,条件2と同じ「体感練習」を行った後,オンラインによる「遠隔指導」を行い,最後に評価実験を行う.「遠隔指導」では,2台の三次元力覚入出力装置(Geomagic Touch)を使用して,実験協力者の動きをもとに熟練者が実験協力者に指導することができる機能を使用した.
さらに,上記の3条件に対して,実験時の視覚情報は,平面の映像を提示する場合(2D)と立体的に映像を提示する場合(3D)の2種類の映像提示方法を設定した.3次元表示(3D)の条件の実験協力者には,生体情報計測機器(JINS MEME)の上から液晶シャッターメガネ(NVIDIA 3DVISION2)を装着してもらった.
本研究の実験条件と条件ごとのSECIモデルの要素の対応を表3に示す.
Table 3 Experiment conditions and number of experimental participants.
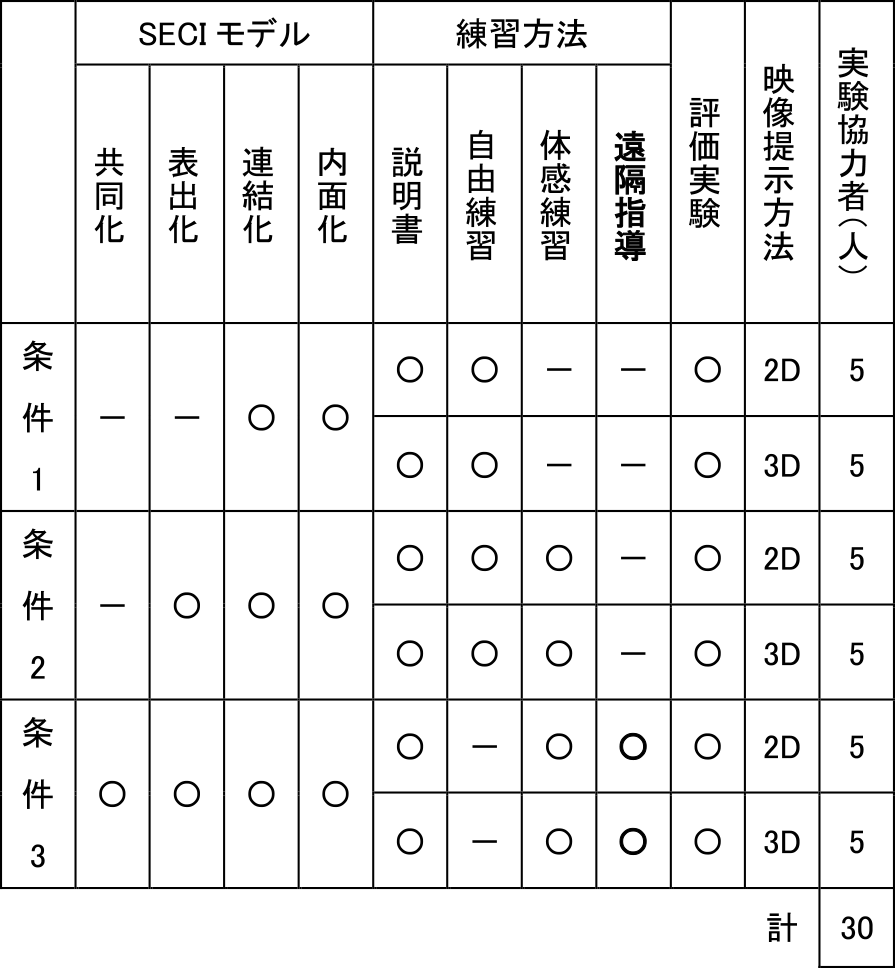
実験協力者は,三次元力覚入出力装置(Geomagic Touch)および3次元表示(3D)の映像やゲームが未経験の大学生・大学院生の計30名(各条件で男性3名,女性2名ずつ)とし,各条件でPCやゲーム機器の操作能力に偏りがないようにした.ただし,眼鏡型の生体情報計測機器(JINS MEME)を装着してもらうため,日常生活で裸眼あるいはコンタクトレンズ着用の人を対象とした.また,熟練者は三次元力覚入出力装置(Geomagic Touch)の操作に慣れた1名がすべての実験を行った.
3.2 実験手順
本研究における実験は,以下の手順で行った.手順をフローチャートとしてまとめ,図3に示す.

Fig. 3 Experimental procedure.
- (1) 実験協力者に実験手順書を渡し,手順書に沿って簡単な機器の説明を行う.
- (2) 全員に生体情報計測機器(JINS MEME)を,3D表示の実験をしてもらう実験協力者には液晶シャッターメガネ(NVIDIA 3DVISION2)を,条件2および条件3の実験協力者にはヘッドホン・マイクを装着してもらう.
- (3) 表1に示した条件ごとに,条件1では,説明書(書面)を見ながらの「自由練習」を6分間,条件2では「自由練習」と「体感練習」をそれぞれ3分間ずつ,条件3では「体感練習」と「遠隔指導」をそれぞれ3分間ずつ行う.なお,各時間設定は,実験協力者の負担を考慮して予備実験により決定した.
- (4) 「評価実験(図2のモニターに示す風船を①~④の順で割る作業)」を行う.すべての風船が割れるまで行ってもらう.
- (5) 提案した力覚技能習得支援システムの有効性を調べるために,各条件の実験協力者にユーザビリティ評価(アンケート)を行ってもらう.表4に示す質問内容は,画面に関する質問(画面に表示される風船の状態や奥行きの分かりやすさに関する質問),メディア間同期品質に関する質問(画面と三次元力覚入出力装置(Geomagic Touch)の動きの同期に関する質問),力覚メディアに関する質問(三次元力覚入出力装置(Geomagic Touch)の操作性や動作に関する質問),実験作業に関する質問(作業の難易度や作業時間,感覚に関する質問),技能伝承に関する質問,実験結果に関する質問の計21問とし,すべて5段階評価で回答してもらった.
表4 ユーザビリティ評価の質問項目
Table 4 Usability evaluation questions.
3.3 分析方法
本研究における実験結果の分析は,条件や映像提示の違いにより,評価実験時の作業時間や1つ目の風船に触れてから最後の風船が割れるまでの総移動距離,眼球運動,ユーザビリティ評価結果を比較した.統計的分析には,エクセル統計2015(社会情報サービス社製)を用いた.
4. 実験結果および考察
本章では,評価実験の結果および考察を示す.なお,図3に示した実験の手順のとおりに実施するのに要した時間は,個人差はあるものの,機器の説明や装着,休憩等を含めて実験協力者1人あたり50~70分程度であった.
4.1 評価実験の総移動距離と作業時間
評価実験時の三次元力覚入出力装置(Geomagic Touch)のペンの先の総移動距離と作業時間を求めた.条件ごとの総移動距離の平均を図4に,作業時間の平均を図5に示す.なお,各図内のエラーバーは標準偏差(±)を示している.また,総移動距離の単位はPCマウスの移動距離と同様に,ミッキー(1ミッキー=100分の1インチ)である.また,熟練者の2次元表示(2D)での総移動距離は643ミッキー,作業時間は19.0秒であった.
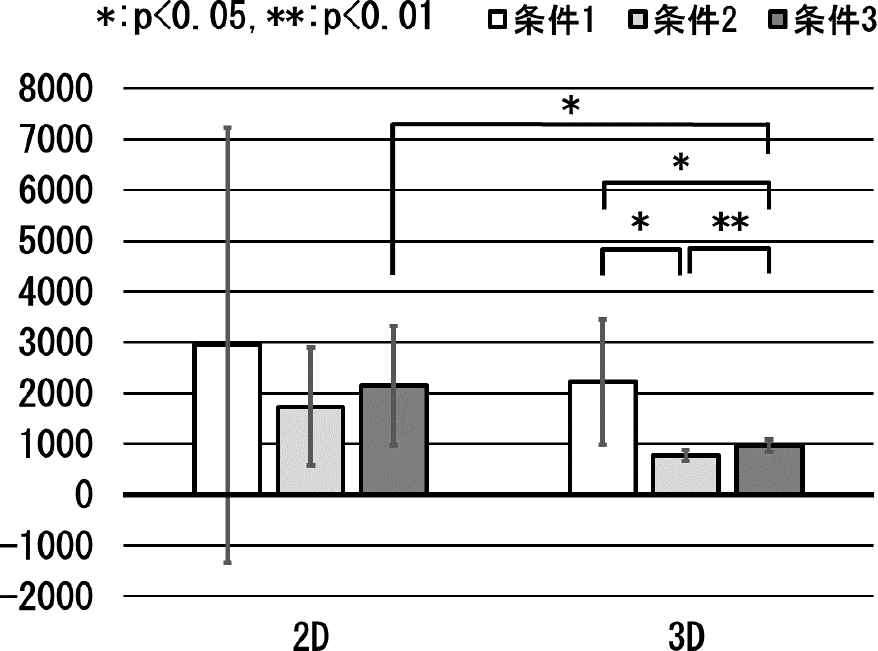
Fig. 4 Average of total distance traveled in the “evaluation experiment”.
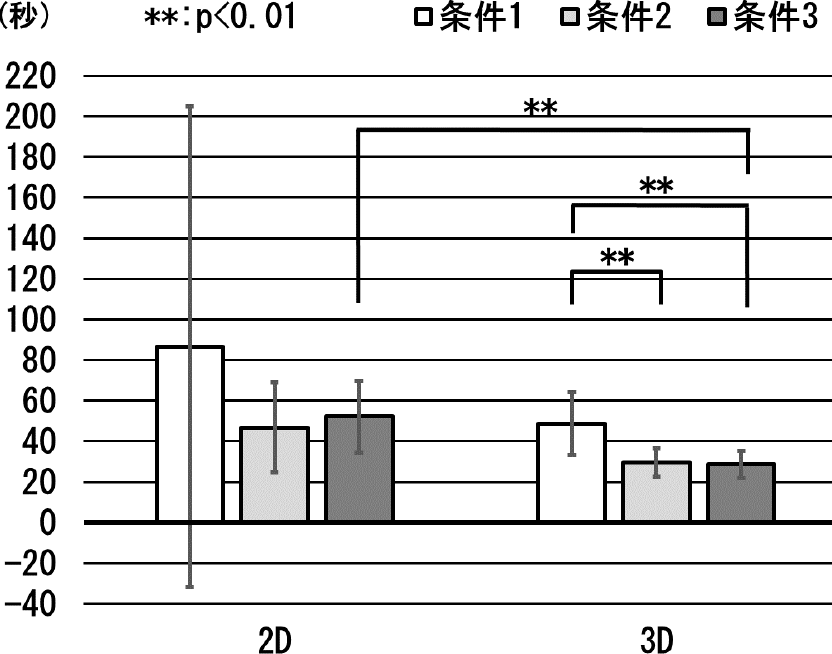
Fig. 5 Average of work time in “evaluation experiment”.
図4より,映像提示方法が3次元表示(3D)の場合,条件1に比べて条件2および条件3のほうが総移動距離の平均は統計的有意に短くなっていることと熟練者の総移動距離に近付いていることから,本研究でSECIモデルの「表出化」の要素が含まれていると想定した「体感練習」の実施により作業時の総移動距離が短くなっている可能性が考えられる.ただし,条件2のほうが条件3に比べて統計的有意に総移動距離の平均は短いという結果であった.また,条件3について,映像提示方法で比較すると2次元表示(2D)に比べて3次元表示(3D)のほうが統計的有意に作業時の総移動距離の平均が短いことと熟練者の総移動距離に近付いていることから,本研究でSECIモデルの「共同化」の要素が含まれていると想定した「遠隔指導」では作業時の映像提示方法が総移動距離に影響している可能性が考えられる.
次に,図5より,映像提示方法が3次元表示(3D)の場合,条件1に比べて条件2および条件3のほうが作業時間の平均は統計的有意に短くなっていることと熟練者の作業時間に近付いていることから,総移動距離と同様に,「体感練習」の実施により作業時の総移動距離が短くなっている可能性が考えられる.また,条件3について,映像提示方法で比較すると2次元表示(2D)に比べて3次元表示(3D)のほうが統計的有意に作業時間の平均が短いことと熟練者の作業時間に近付いていることから,総移動距離と同様に,「遠隔指導」では作業時の映像提示方法が総移動距離に影響している可能性が考えられる.
なお,本研究で開発したオンライン力覚技能伝承支援システムの有効性を示すためには,各条件で習熟するまでに要する時間や習熟度合の調査も必要であると考えるが,本研究では各条件で習熟するまでに要する時間や習熟度合については調査を行っていないため,今後の課題としたい.
4.2 評価実験中の実験協力者の眼球運動
評価実験中の実験協力者の眼球運動を調べるために生体情報計測機器(JINS MEME)から得られた眼電位データ(眼球の水平移動(EOG-H),眼球の垂直移動(EOG-V))を分析した.その結果として,条件ごとの眼球の垂直移動(EOG-V)の平均を図6に示す.なお,図内のエラーバーは標準偏差(±)を示している.また,値(EOG-V)が正の場合は上方を負の場合は下方への眼球の移動を示しているが,瞬目の影響もあるため,正確な移動量は示すことができないことと熟練者の眼電位データが機器不良により取得ができなかったことから,本研究で得られた結果は参考データとして示す.
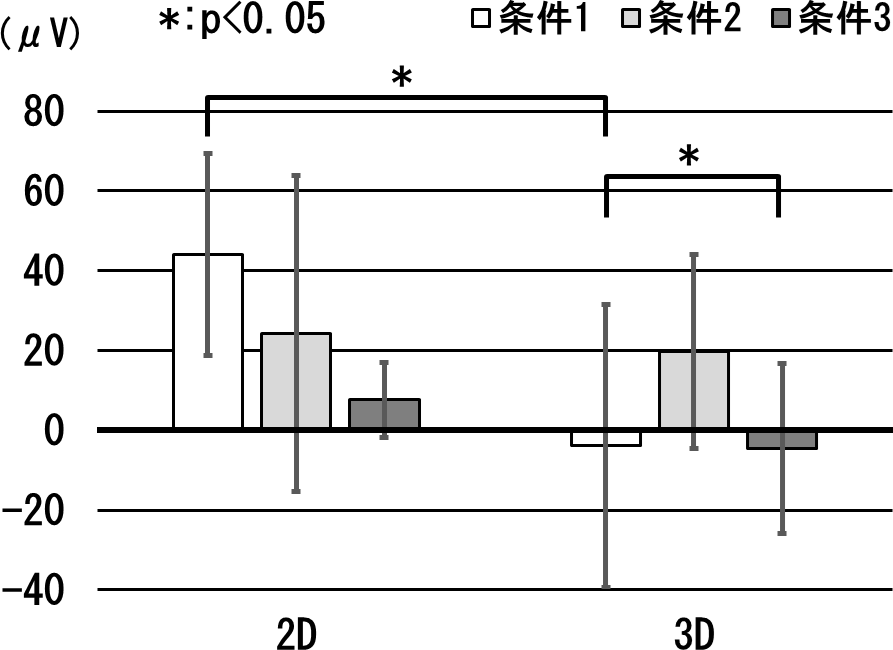
Fig. 6 Average of electrooculography EOG-V in the “evaluation experiment”.
図6より,2次元表示(2D)の場合には,条件1,条件2,条件3の順に眼電位EOG-Vの値が小さくなっていることから「体感練習」または「遠隔指導」の実施により眼球の垂直移動は小さくなる可能性が推測されるが,統計的有意な差は認められなかった.3次元表示(3D)の場合は,条件1に比べて条件3のほうが統計的有意に眼球の垂直移動が大きいことが確認された.また,条件1では2D・3D間でも統計的有意な差が認められ,2次元表示に比べて3次元表示のほうが眼球の垂直移動が小さいことが認められた.
ただし,眼球の水平移動を示す眼電位(EOG-H)については,条件間および映像提示方法の違いで差はみられなかった.
4.3 ユーザビリティ評価
実験終了後に行ったユーザビリティ評価(高評価が高得点)について,表4の質問項目ごとに各条件で平均を求めて統計的分析を行った.その結果として,表3の質問項目のうち,映像提示方法が2次元(2D)または3次元(3D)のどちらかで,条件間で有意な差が認められた質問項目のみをまとめて,映像提示方法別に図7および図8に示す.
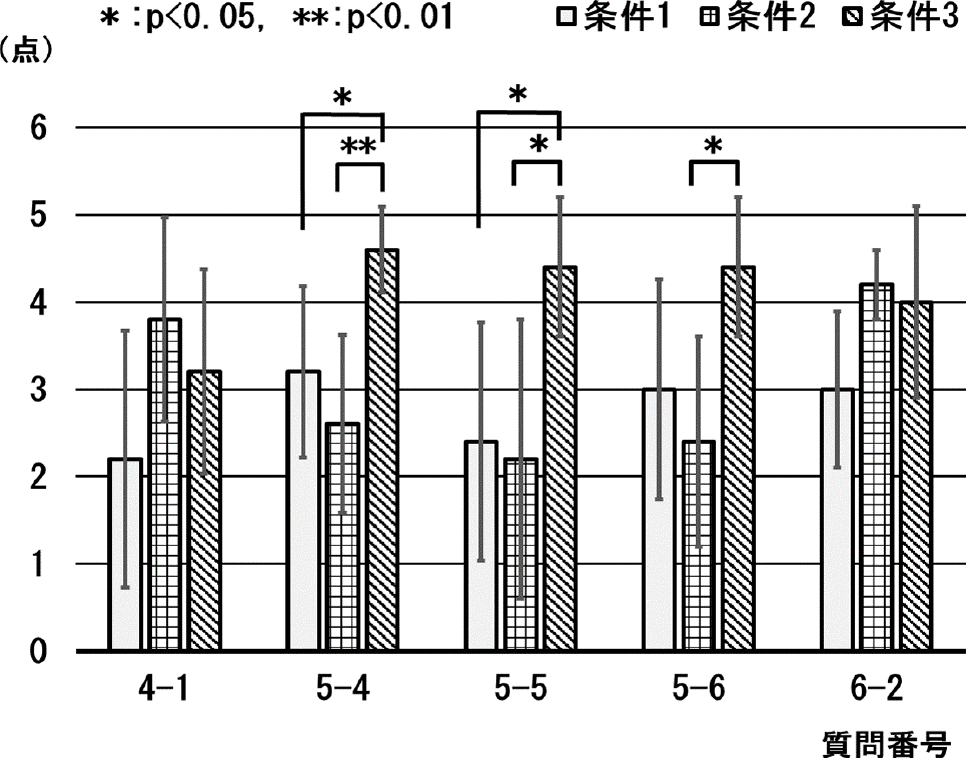
Fig. 7 Average of usability evaluation (2D).
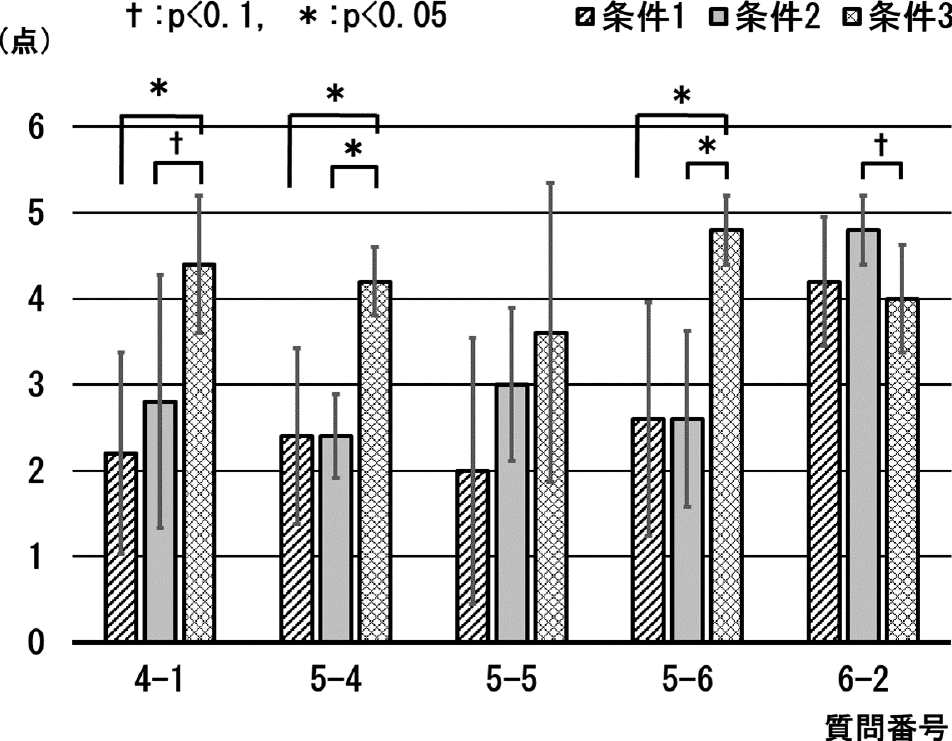
Fig. 8 Average of usability evaluation (3D).
なお,各図内のエラーバーは標準偏差(±)を示している.また,ユーザビリティ評価(5段階評価)の最大値は5であるが,エラーバー(標準偏差)を図内に表示するために縦軸の最大値は6として示している.
図7の質問5–4および質問5–6の結果より,映像提示方法が2次元表示(2D)の場合,条件1または条件2に比べてオンライン支援である条件3のほうが技能伝承や力覚情報の習得に効果があると統計的に有意な差が示された.つまり,SECIモデルの「共同化」によって力覚技能伝承や力覚情報の習得に効果があると感じていることが示されたと考えられる.また,質問5–5の結果より,2次元表示の実験協力者のうち条件3の実験協力者ほど,3次元表示のほうが技能伝承に効果があると統計的に有意な差が示された.
図8より,映像提示方法が3次元表示(3D)の場合,条件1または条件2に比べてオンライン支援である条件3のほうが「作業が簡単であった(質問4–1)」と評価する傾向がみられた.また,質問5–4および質問5–6の結果より,条件1または条件2に比べて条件3のほうが技能伝承や力覚情報の習得に効果があると統計的に有意な差が示された.つまり,SECIモデルの「共同化」によって力覚技能伝承や力覚情報の習得に効果があると感じていることが示されたと考えられる.ただし,質問6–2の結果より,条件2に比べて条件3のほうが実験結果に対する自己評価が低い傾向もみられた.
5. おわりに
本研究では,知識創造のプロセスであるSECIモデルに基づき,力覚技能の習得のためのオンライン支援システムを構築した.そして,視覚情報の提示方法の違いを含めて条件分けして,教育を行った場合の評価実験結果を比較することにより,SECIモデルのプロセスが非熟練者への力覚技能伝承の支援にどのような効果があるのかを考察した.得られた知見は,以下のとおりである.
- (1) 評価実験時の作業時間および総移動距離の平均については,映像提示方法が3次元表示(3D)の場合は,「体感練習」の実施により値が統計的有意に減少することが確認された.
- (2) 実験協力者の眼球運動を比較した結果,映像提示方法が2次元表示(2D)に比べて3次元表示(3D)のほうが眼球の垂直移動が小さい傾向がみられた.
- (3) ユーザビリティ評価の結果より,SECIモデルの「共同化」を含む条件(オンライン支援である条件3)のほうが他の条件に比べて,力覚技能の伝承や習得に効果があると統計的有意に評価されていることが示された.
ただし,今回の結果は,本研究で実験した範囲内で得られたものであり,普遍的な結論を得るためには実験協力者を増やし,更なる実験が必要であると考えている.
今後の課題としては,今回の実験の条件3(オンライン支援システムを使用した条件)では実験時間が長時間になるために実験協力者の負担が大きいことから「自由練習」の時間を設けなかったが,条件3においても「自由練習」を追加して実験を行うことにより,どのような結果が得られるかを確認したいと考えている.さらに,実企業での運用を想定した対象オブジェクトを設定して運用試験を行い,構築したオンライン力覚技能伝承システムの有用性を検証する必要があると考えている.本システムの実務への適用が実現すれば,オンライン活用による技能教育として多様な働き方の一助になると期待される.
謝辞 本研究にご協力いただいた実験協力者の方々に深く感謝の意を表する.また,本研究に関する予備実験に協力していただいた平山暢峻氏および豊田良太氏に感謝する.最後に,本研究の一部は,科学研究費助成事業・基盤研究(B)JP 23K22985の助成により実施されたことを記し,感謝の意を表する.
参考文献
- [1] 経済産業省:2018年版ものづくり白書,〈https://www.meti.go.jp/report/whitepaper/mono/2018/honbun_pdf/index.html〉(参照2023-03-10).
- [2] 東京都産業労働局:平成27年度東京の中小企業の現状:製造業編,〈http://www.sangyo-rodo.metro.tokyo.jp/toukei/chushou/genjyou/h27/index.html〉(参照2023-12-30).
- [3] 綿貫啓一:バーチャルトレーニングとOJT を融合した鋳造技能伝承および人材育成,精密工学会誌,Vol.76, Vol.4, pp.382–389(2010).
- [4] 梶原康博,常定和也,西村 剛,大崎紘一,池田哲也:人工現実感を用いた組立作業訓練の効果に関する研究,日本経営工学会誌,Vol.59, No.2, pp.162–172(2008).
- [5] 橋本宣慶,御簾納陽介,加藤秀雄:フライス盤操作シミュレータによる加工順序学習とハンドル操作技能訓練の効果,日本バーチャルリアリティ学会論文誌,Vol.16, No.4, pp.559–565(2011).
- [6] 伊津見一彦,梶原博康,滝 聖子,江澤 昇,赤鹿智之:熱交換器チューブ交換作業教育支援装置の開発,日本設備管理学会誌,Vol.25, No.2, pp.46–51(2013).
- [7] 竹内博良,胡摩心一郎,佐野明人,藤本英雄:インタラクティブな手術シミュレーションのための柔軟物操作モデリング,バーチャルリアリティ学会論文誌,Vol.8, No.2, pp.137–144(2003).
- [8] 村瀬悠佑,神谷直希,村上和人:筆圧パターンの統計量を利用した筆記評価の一考察,映像情報メディア学会技術報告,Vol.39, No.39, pp.5–8(2015).
- [9] 浅野寿朗,石橋 豊:触覚を利用した遠隔教示システムにおけるメディア間同期品質評価,バーチャルリアリティ学会論文誌,Vol.11, No.4, pp.459–468(2006).
- [10] Watanabe, Y. Taki, S. Kajihara, Y. Koshiishi, T. Osaki, H.: A Support System for Transferring Manufacturing Skills, Asia-Pacific Journal of Industrial Management, Vol.4, pp.84–94(2013).
- [11] 野中郁次郎,梅本勝博:知識管理から知識経営へ:ナレッジマネジメントの最新動向,人工知能学会誌,Vol.16, No.1, pp.4–14(2001).
- [12] 王 敏偉,綿貫啓一:インターネットベース顧客志向生産システムの構築(階層分析法を用いた設計案の定量化),設計工学,Vol.40, No.8, pp.416–424(2005).
- [13] 野中郁次郎,紺野 登:知識経営のすすめ,ちくま新書,(1999)
- [14] 大島丈史,内平直志:プロジェクトマネジメントへのAI活用の知識分類モデル:IT企業におけるAI適用方策の研究, Vol.13, No.1, pp.121–141(2018).
- [15] 丸山文宏:オフィスと人工知能技術,情報処理,Vol.47, No.7, pp.729–734(2006).
- [16] 森 和夫:技術・技能伝承ハンドブック,JIPMソリューション,(2005).

seiko.taki@it-chiba.ac.jp
2006年岡山大学自然科学研究科博士後期課程修了.博士(工学).同年より首都大学東京(現 東京都立大学)システムデザイン学部助教.2013年より千葉工業大学社会システム科学部准教授,2019年より教授.2024年より情報変革科学部教授.現在,作業研究に基づく技能伝承支援,ワークライフバランス支援等に関する研究に従事.
2019年千葉工業大学社会システム科学部卒業.
採録日 2024年4月15日