自動配送ロボットの走行情報に関するAR表示がもたらす周辺歩行者への心理負荷低減
Reduction of Psychological Burden on Pedestrians in the Surrounding Area by AR Display of Automatic Delivery Robot's Traveling Information
1. はじめに
コロナ禍のオンラインショッピングの需要拡大もあり,2021年における国内の宅配便取扱個数は年間50億個に迫り,配送員不足が問題視されている[1].そのため,効率化や人員不足対策の新しい手段として,ラストワンマイルを担う自動配送ロボットの利活用が期待されている.そして近い将来これらが一般的に利用される社会も予想できる.ただし,技術は人の行動様式に変化をもたらすリスクも伴う.周辺歩行者と走行経路の予測が困難な自動配送ロボットとの衝突が懸念されており,ロボットと人が快適に共存するための仕組みについて検討することが喫緊の課題である.たとえば自動配送ロボットの利用において想定されるシナリオの一例としては,将来的に複数の自動配送ロボットが日常的に路上を走行する社会が実現したと仮定し,信号待ち,路上での待ち合わせ,または友人と雑談中の人物付近を自動配送ロボットが通過するようなケースである.その際に路上の人々には後述するような何らかの不安が発生すると考えられる.従って,ARを用いて自動配送ロボットの接近により生じた路上の人々の不安を低減することを本研究の課題とする.ARを用いることで,従来研究では観測者とロボットの距離に応じて低下していた表示情報の視認性の改善にも寄与すると考える.
そこで,本稿では自動配送ロボット周辺の歩行者の不安低減を目的とした情報の提示について述べる.まず研究の前提として周辺歩行者に生じる不安について整理したい.人間がロボットから受ける不安感については,移動体ロボットの速度と人の不安感の関係について調べたNakashimaら[2]の研究など多くの研究がなされている.また,走行物体に対する不安感として,衝突の懸念が挙げられるが,津留ら[3]の実験により対象物の視覚的な面積変化や速度と相関を持つことが示されている.さらに別の側面として,ロボットに備えられたカメラ等のデバイスを利用した個人情報の収集によるプライバシーの侵害に関する問題[4]や危害を加えることを目的としたロボットに関する問題[5]に起因する不安が挙げられる.そこで我々は自動配送ロボットから生じる不安を,走行に起因する不安と,ロボットが起点となる事件に関する不安の2種類に大別する.次に,課題解決の手段として自動配送ロボットに起因する不安を将来的な実用シーンから予測して9種類のAugmented Reality(AR)コンテンツを提案した.研究対象とするコンテンツは走行に起因する不安と,事件に関する不安の両方である.提案手段の有効性を検証するために,自動配送ロボットが屋外を走行する筑波大学に5Gアンテナを施設し,提案した9種類のARコンテンツをスマートフォン上に表示するシステムを構築した.実験では,ARコンテンツを観察した実験参加者にアンケート調査を行い,パーソナルスペースの侵害や物体の近接を事前に可視化するARコンテンツが周辺歩行者の不安感を低減することを確認した.図1に実験参加者から見た実験の様子を記す.実験協力者が筑波大学内を走行する自動配送ロボットにスマートフォンをかざした様子であり,スマートフォン上に我々が開発したARコンテンツが表示された様子である.なお一部の図中で自動配送ロボット(Automated Delivery Robot)を略記のためADRと記す.

Fig. 1 The state of the experiment as seen from the experiment participants.
2. 関連研究
人間がロボットから受ける不安感については,これまでに多くの研究がなされている.Nakashimaらは移動体ロボットの速度と人の不安感の関係について研究し[2].Hiroiらは人が違和感や恐怖感を覚えることなく接近を許容する距離とロボットの大きさの関係を明らかにした[6].Hiroiらの研究では,高さ1200 mm未満のロボットに対する恐怖感が小さいことが示されている.また,この結果を裏付けるように多くの研究で1200 mm近辺の高さのロボットが利用されている[7]-[9].また,走行物に対する不安感として衝突の懸念が挙げられるが,津留らの研究[3]で,対象物の視覚的な面積変化や速度と相関を持つことが示されている.様々なロボットの出現に伴い,ロボットの安全性に対しても研究が進んでいる.ロボットと人との接触の懸念を物理的に解決する研究としては,人の接近を感知して動作を停止する機能に関する研究[10], [11]や,接触の衝撃を緩和する研究[12], [13]などがある.ロボットの動作をあらかじめ周辺に通知する研究としては,松丸らはレーザポインタの光線を用いて3秒後の予定経路を走行路面に描画することで,移動ロボットの次の動作(移動方向・移動速度)を周辺歩行者に通知するシステムを開発した[14].同じく松丸らにより,ロボットの上面に設置された平面ディスプレイに矢印を表示することで移動方向と速度を通知する研究もなされている[15].また,小田らはRFIDを利用した安全運転支援システムにおける位置・進行方向・速度情報による安全情報伝達方法について検討した[16].松丸らのレーザポインタを用いた研究は,ロボットの3秒後の経路情報しか表示できないため,高齢者などがロボットの近接に対して対応することが困難と考えられ,ディスプレイ表示を用いた研究についてはロボットと観測者の距離に応じて視認性が低下すると考えられる.また,小田らの研究は,対象に備えられたRFIDを読み取ることで情報が取得されるが,地面に磁場発生用コイルを施設する必要があり.システムコストが高額になる事が懸念される.我々の研究もロボットの動作をあらかじめ周辺に通知する研究であるが,通知期間に関する制限が無く,道路にデバイスを施設する費用が生じることのない手法である.
3. ARコンテンツ
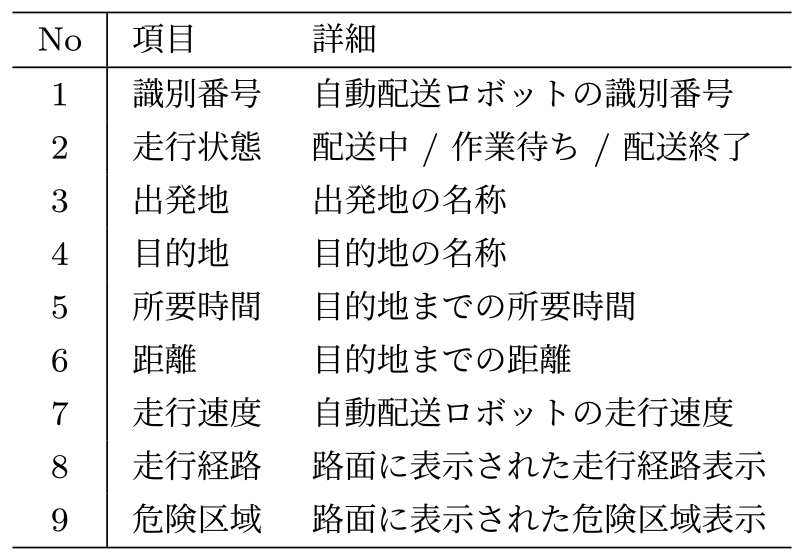
図2は本研究で作成したARコンテンツを表示したスマートフォンの画面である.図に示すように,本稿ではARコンテンツに参照番号を割り当てた.コンテンツの概要については表1に記す.コンテンツの目的は3種類に大別される.1つ目は,自動配送ロボットが起点となる事件に関する不安への対応を目的としたコンテンツであり,ロボットの情報を周辺歩行者に開示する.#1(識別番号),#2(走行状態),#3(出発地),#4(目的地)がこの種別に該当する.2つ目は自動配送ロボットの走行に起因する不安への対応を目的としたコンテンツであり,#7(走行速度),#8(走行経路),#9(危険区域)がこの種別に該当する.3つ目は比較用の参考情報であり不安低減の意図を持たないコンテンツである.#5(所要時間),#6(距離)がこの種別に該当する.各コンテンツの詳細について以下で述べる.
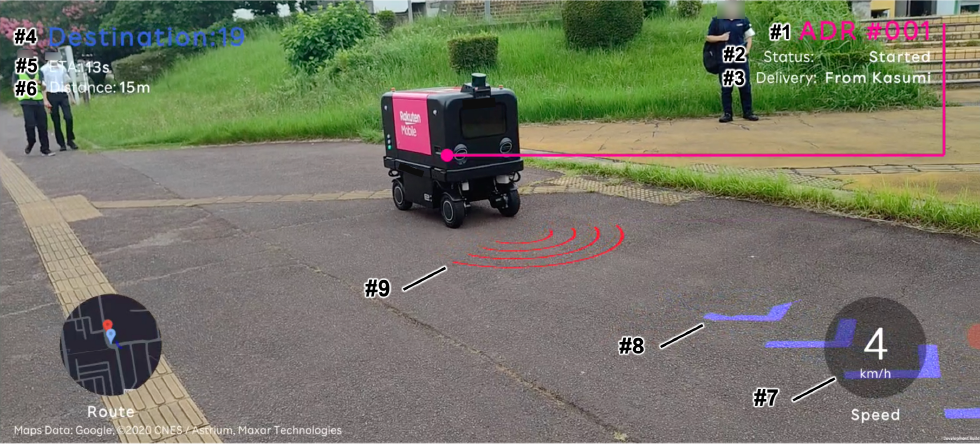
Fig. 2 AR content shown on a mobile device. Each item is assigned an item number according to Table 1.
Table 1 Description of each AR contents.
#1(識別番号)は複数台の自動配送ロボットを識別するための番号である.本研究では1台の自動配送ロボットのみを利用したが,将来的な実利用を想定した場合には複数台の自動配送ロボットを同時に稼働する必要がある.たとえばスーパーマーケットの自動配送のような実利用を想定した場合,同一時間帯に複数の注文が発生することが想定されるためである.2013年度の一般財団法人運輸政策研究機構の資料[17]によれば日本国内の駅間距離の平均値は2.85 kmである.この距離をスーパーマーケット1店舗の営業区域として,各駅の駅前に店舗を構えた場合の1店舗の営業半径は1.43 kmとなり,自動配送ロボットが1回の配達で走行する最長距離は営業半径を2倍した2.85 kmとなる.従って,自動配送ロボットが顧客の注文を時速4 km/hで配送する場合の最大配達時間は約42分となる.また注文品の積み込みや到着時の取り出し,信号の待ち時間などを考慮すると,1台あたりの最大配達時間は1時間程度になると考えられる.従って,1時間に3件程度の注文が発生すると仮定した場合,注文当日の配達を前提とするならば2台以上の自動配送ロボットを運用することが望ましい.さらに,複数台の自動配送ロボットが運用されている環境では個体の識別が必要となる.たとえばそれは,周辺歩行者がその場で荷物の配送をオーダする場合であったり,故障や事故を目撃した歩行者が運行会社に連絡する場合などである.そのような状況を踏まえて識別番号のARコンテンツを設定した.また,運用区域内に複数の自動配送ロボットが走行した場合,周辺歩行者のスマートフォンの画面に複数の自動配送ロボットが出現する可能性が想定される.その場合,スマートフォン上に表示されている自動配送ロボットと識別番号を対応付ける必要がある.その情報を視覚化するために識別番号と画面上の自動配送ロボットを桃色の線分で結ぶ表示を加えた.
#2(走行状態)は自動配送ロボットの走行状態情報である.配送中/作業待ち/配送終了の3つの状態を周辺歩行者に通知する.このコンテンツを表示する目的は周辺歩行者に自動配送ロボットが停止している理由を明示するためである.今回実験で用いる自動配送ロボットは全長1,240 mm,幅700 mm,高さ1,140 mmであり,市販の原動機付き自転車よりも幅が広い.また,日本国内の小型スーパーマーケットは道幅の狭い商店街や,歩行者の往来が多い歩道に面しているケースが少なくない.このような面積当たりの歩行者数が多い路面で原動機付自転車よりも幅の広い物体が停止している状態は決して歩行者にとって快適とは考えられない.次に将来的な自動配送ロボットの事業としての側面を考える.これには2つのケースが考えられる.1つは,スーパーマーケット等の店舗が顧客の利便性向上のために自社で自動配送ロボットを保有するケースである.そのようなケースでは筐体デザインはスーパーマーケットのロゴ等になる可能性が高く,明らかに自動配送ロボットの保有者が特定のスーパーマーケットであることが理解できる.もう1つのケースは,複数の自動配送ロボットを保有して,すべてのスーパーマーケットの配送を請け負うタクシーのような形態の事業者が出現するケースである.その場合,筐体はスーパーマーケット固有のデザインでは無く,配送会社の独自のデザインである可能性が高い.ある店舗の前に,その店舗特有のデザインの自動配送ロボットが停止していれば,歩行者は暗黙的に目的を理解できるが,店舗との関係が暗黙的に理解できない自動配送ロボットが狭い路面で停止している状況は,歩行者にとって快適とは考えられない.そこで,ARコンテンツを介して,自動配送ロボットの現在のステータスを通知することで周辺歩行者の不安を低減する.
#3(出発地)ならびに#4(目的地)は出発地と目的地の表示である.このコンテンツの目的は周辺歩行者に対して自動配送ロボットの所在の正当性を明示することである.たとえば相手が人間であれば,周辺住民や警備事業者が任意の地域に現れた存在意図の不明な人物を発見した場合,その人物に対して声掛けをすることで意思疎通を図ることが可能である.一方,自動配送ロボットはその目的から現場周辺には運用側の人間が存在しない.そのため,周辺住民や警備事業者が任意の地域で存在意図の不明な自動配送ロボットを発見した場合でも,走行・停止に関わらずその場所に存在する理由を確認することができない.たとえば悪意を持って危険物を周辺地域に持ち込む場合や,故障により経路を離れて走行・停止している場合などが考えられる.危険物を持ち込むなどの疑いがある場合は,出発地に問い合わせることで走行理由を確認することができる.また,自身が居住する集合住宅に面した路面に停止している自動配送ロボットに不審を抱くケースでは,目的地を確認することで正常異常を見極めることができる.ただし,目的地を個人名や特定住所とした場合,個人情報の漏洩につながるため,本研究では出発地を店舗名,目的地を集合住宅名のように抽象的な表示に留める.
#5(所要時間)ならびに#6(距離)は目的地までの所要時間と距離である.このコンテンツの目的は不安感の低減ではなく参考情報の供給である.たとえば自動配送ロボットの利用経験を持たない周辺歩行者がコンテンツを確認することで,任意の距離に対する配送所要時間の目安を知ることができる.その結果が自動配送ロボットの利用の動機につながる等が想定される.
#7(走行速度)は自動配送ロボットの走行速度の表示である.このコンテンツは周辺歩行者に対して自動配送ロボットの近接・離間の程度を通知する.なぜなら,人間の衝突に対する不安感は,対象物の視覚的な面積変化,更には対象物の速度と相関を持つことが示されている[3]ためであり,速度を通知することが周辺歩行者の不安感低減につながると考えるからである.一般的に,一部の歩行者は視覚情報から自動配送ロボットの速度を想像できるかも知れないが,視覚情報からは自動配送ロボットの速度が想像できない歩行者も存在する.その要因の1つとして,対象物に対する事前知識が考えられる.たとえば自動車を例に取ると,多くの人は走行中の車の形状から乗用車であるかトラックであるかを識別できる.一般的な車のサイズは多くのメーカで類似しているため,ある観測者が乗用車を観察した場合,観測者は経験的にその乗用車がおおむね幅1.8 m長さ5 m程度の大きさであることが理解できる.従って,車の視覚的な面積の変化を観測することで,経験則的に観測車両までの距離と速度を大まかに予測することができる.一方,自動配送ロボットには自動車のような普遍的な幅や長さは存在しない.開発者や用途によりその大きさは様々である.周辺歩行者が自動配送ロボットを知覚して,その面積変化を観測した場合に,視覚的な面積の変化が距離に起因するものか速度に起因するものかを判断することが困難となる.このような事前知識の欠如に起因する不安感を低減するために,ARコンテンツで速度表示を行う.
#8(走行経路)は自動配送ロボットの走行経路の表示である.自動配送ロボットの進行方向の5 m前方から目的地までの路面上に表示される.自動配送ロボットと同じ幅の表示で,長さが同じ直線の端点をロボットの進路上に重ね,残りの端点を進行方向から120度の角度で左右に開いた青色の図形を目的地まで等間隔に配置した.3次元空間上の鉛直方向の表示については地表の高さに表示する.例として自動配送ロボットの経路が登り勾配を持つ場合は,経路表示も鉛直方向上向きの勾配を持って表示される.このコンテンツは,自動配送ロボットが周辺歩行者にどの程度近接するかを通知する.なぜなら,人はパーソナルスペース[18]と呼ばれる1 mから1.5 m程度の他者の近接に不快感を示す空間を持つことが知られている.ロボットとパーソナルスペースの関係についてもこれまで多くの研究がなされている[19]-[21].Nakashimaらの研究[2]では,移動ロボットの速度と周辺観測者の不安感の関係が明らかにされており,周辺歩行者は0.2 m/sで歩行する移動ロボットとの距離が1 m以内になると不安感を感じることが示されている.従って,あらかじめ走行経路をARコンテンツとして提示することで,周辺歩行者に自動配送ロボットとの距離を確保するなど心理的負担を低減する行動を促す.
#9(危険区域)は危険区域に関する表示である.ロボットの2 m前方に扇形の線分を赤色で4本表示する.ただし,危険区域と表現しているが,実際に歩行者が自動配送ロボットに近づいた場合,自動配送ロボットは減速して走行ルートを変更する機能を備えているため,歩行者に危害が及ぶことは無い.この表示の目的は,#7(走行速度)ならびに#8(走行経路)の説明で述べたように定速走行する自動配送ロボットから生じる不安感の低減と,パーソナルスペースの侵害に対する不快感を低減するためである.つまり,この表示の内側に入ると不安感や不快感が生じるという注意喚起である.
4. システム概要
システム概要を図3に記載する.自動配送ロボットから送信された情報はクラウドサービスを経由してユーザのスマートフォンで受信される.自動配送ロボットからの送信,ならびにスマートフォンの受信は楽天モバイルの5G移動通信網を用いる.なお,日本国内で5G通信に使用される帯域は28 GHz帯と6 GHz帯の2種類が存在するが,今回の実験ではSub6と呼ばれる6 GHz帯で通信を行う.また有線区間におけるクラウドサービスとの通信はインターネット回線で接続する.クラウドサービスにはMicrosoftのAzure Web PubSubを用いて10 Hzの頻度でスマートフォンでデータを受信する.一方,スマートフォンにはARコンテンツ表示用のアプリケーションがインストールされるが,Unityをベースに開発されている.Unity上で自動配送ロボットから受信した位置情報とVisual Positioning System(VPS)で構築した空間情報を組み合わせることで,スマートフォン上でARコンテンツの表示を実現する.VPSのマップ生成にはImmersal社のAndroindアプリケーションであるImmersal App version 1.2を用いた.VPS構築の様子を図4に記す.また,ARコンテンツ表示用のデバイスはSharp社のAQUOS R5Gを用いた.自動配送ロボットは全長1,240 mm,幅700 mm,高さ1,140 mmで,物理的なオブジェクトを格納するための4個の荷室を備える.この荷室は本来の配送業務に活用されるが本研究では使用していない.更に経路上の人や障害物との衝突を避けるための自動停止機能を備える.
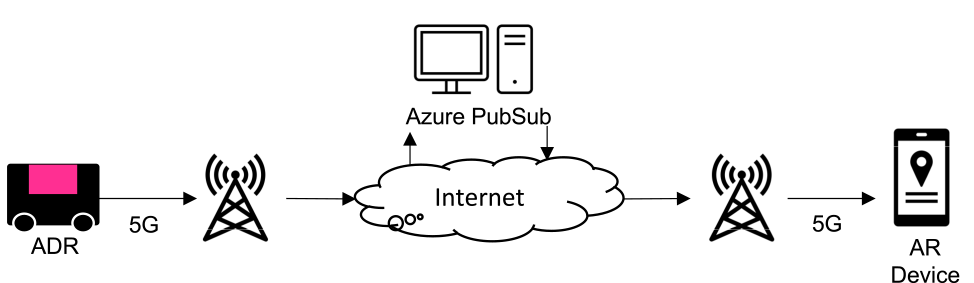
Fig. 3 System overview.
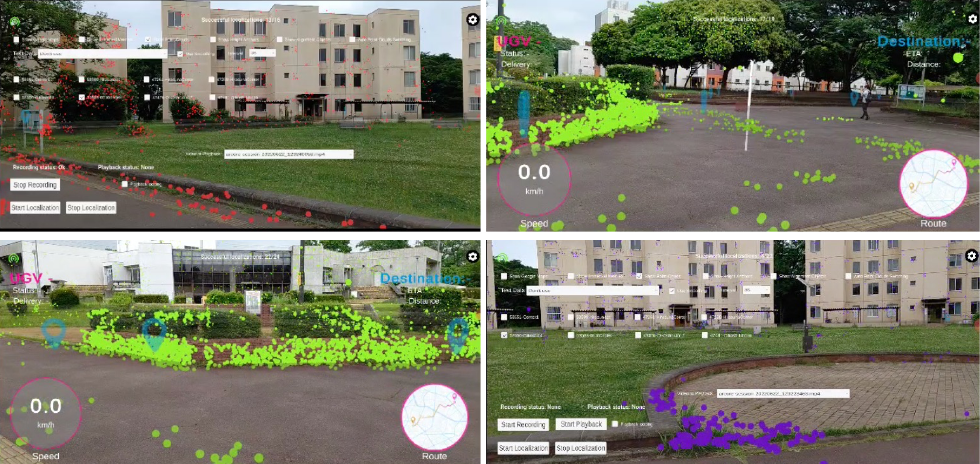
Fig. 4 Samples of VPS creation.
5. 実験
実験は2022年8月4日に筑波大学校内の西地区平砂宿舎エリアで実施された.ただし基地局の整備など5G網については事前に構築した.実験エリアの平砂学生宿舎とレジデント宿泊施設の屋上に合計3本のSub6アンテナを設置し,実験当日は5G通信端末が正常に通信することを確認した.なお,実験当日の5G通信環境における自動配送ロボットとスマートフォン間のデータの遅延は平均160 msec,最大566 msec,標準偏差6.1 msecであり,比較用として計測した4G通信環境における遅延は平均1671 msecであることが確認された.次にAR表示に必要な自己位置推定の基礎となる3Dマップの作成について述べる.3DマップはImmersal APP ver 1.2を用いて6月と7月の2ヶ月間で作成した物を用いる.Immersal APPはVisual Positioning System(VPS)を用いて3Dマップを生成する.予備実験で3Dマップを生成した結果,我々の実験環境における3Dマップ作成には3つの課題が発生した.1つは樹葉である.実験環境の平砂宿舎エリアは樹木と住居ビルが交互に配置された区画であり,季節の変化に伴い樹葉の繁茂状況が変化する(図5).もう1つは自転車である.学生宿舎の入り口に併設された自転車置き場には多くの自転車があり,学生の出入りとともにその配置は常に変化する(図6).残りの1つは天候である.データ作成の季節は梅雨から夏であり,雨天や激しい日照が定期的に発生した.これらの変化に応じてVPSの精度が変化するため,実験では樹木と自転車置き場を実験環境から除外するという制約を設けた.実験の最終候補地を図7に記す.また天候に応じた複数の3Dマップを作成することで天候の変化に対応した,実験当日は天候に応じて3Dマップを切り替えることでARコンテンツの表示精度を改善した.

Fig. 5 Trees at the experimental candidate site.

Fig. 6 Bicycles parked in front of the dormitory.

Fig. 7 Experimental environment.
実験では,事前に内容の説明を受けて実験内容に同意した10名の実験参加者が自動配送ロボットの走行を観察し,選択式のアンケートに回答する.実験の想定シーンは,将来的に複数の自動配送ロボットが日常的に路上を走行する社会が実現したと仮定し,待ち合わせや信号待ち,または友人との雑談中の人物付近を自動配送ロボットが通過するという想定である.なお,実験参加者には事前に実験の想定シーンについて通知した.実験環境では自動配送ロボットが実験エリアの平砂1学生宿舎の玄関前(図7のS1)と平砂生活センターの広場(図7のS2)迄の間を同じルートで繰り返し走行している.走行区間の距離は110 mで速度は4 km/hである.実験参加者は平砂1の玄関から100 m,平砂生活センターの広場から10 m,さらに自動配送ロボットとの衝突を避けるため経路から0.9 m離れた位置に立ち,ロボットが平砂1の玄関から走行を開始した時点で実験を開始し,平砂生活センターの広場に到着した時点で実験を終了する.実験参加者は自動配送ロボットがこの区間を走行する様子を観察する.実験参加者は2種類の条件で自動配送ロボットを観察する.1つ目の条件は,ARコンテンツの無いケースであり,2つ目の条件はARコンテンツを伴うケースである.以後,各々をC0(非AR条件),C1(AR条件)とする.C1(AR条件)の実験では,スマートフォン上にARコンテンツが表示される.実験参加者はスマートフォンの画面上でARコンテンツの表示とともに自動配送ロボットを観察する.C0(非AR条件)の実験では,スマートフォン上にARコンテンツが表示されない.ただし,C0(非AR条件)の実験においても,実験参加者はARコンテンツが表示されないスマートフォンの画面を通して,カメラのフレームを覗くように自動配送ロボットを観察する.これは,C1(AR条件)とC0(非AR条件)の両方の実験で視野角やデバイスを保持する肉体的負担などの実験条件を統一するためである.なお,実験参加者には自動配送ロボットに対する不安感の調査を目的とした実験である旨を通知し,実験参加者がデバイスを介して自動配送ロボットを観察する2種類の実験に参加すること,実験の1つはデバイス上にARコンテンツが表示されること,もう1つの実験はデバイス上にARコンテンツが表示されないこと,さらに,ARコンテンツが表示されない実験において,カメラのフレームを覗くようにスマートフォンをかざして自動配送ロボットを観察する理由は実験条件を統一するためである旨を通知した.実験説明後に質疑応答の時間を設けたが,実験参加者から実験に対する疑問は生じていない.実験参加者の順序はランダムで決定し,実験の順序(C1(AR条件)ならびにC0(非AR条件)の順序)も実験参加者ごとにランダムで実施された.実験の安全性についても事前に実験参加者に十分に伝えられ,緊急時に備えて自動配送ロボットの停止ボタンを操作するオペレータの立ち会いのもとで実施された.
実験参加者は実験終了後に2種類のアンケートに回答した.1番目のアンケートではARコンテンツの表示状況に応じた不安感の程度を回答した.C1(AR条件)とC0(非AR条件)に対する不安感の比較を目的としたものである.実験参加者は「ほとんど不安を感じない」と「大いに不安を感じる」を5段階で記入した.実験の結果,C0(非AR条件)と比べて,C1(AR条件)で不安感が低減することを確認した.図8にアンケートの集計結果の平均値を記す.ピンクの棒グラフが長い程,実験参加者の不安が大きいことを記す.図8はC1(AR条件)よりもC0(非AR条件)のほうが実験参加者の不安が大きいことを示唆している.また,図中の棒線はプラスマイナス標準偏差を示したエラーバーである.2番目のアンケートでは,実験参加者は実験で表示された9種類のARコンテンツの不安軽減効果を個別に評価した.「ほとんど効果がない」と「非常に効果的」を5段階で評価した.その結果,#8(距離)ならびに#9(危険区域)のコンテンツは効果が高いと評価された.図9にアンケートの集計結果の平均値を記す.水色の棒グラフが長い程,不安の削減効果が大きいことを記す.また,図中の棒線はプラスマイナス標準偏差を示したエラーバーである.
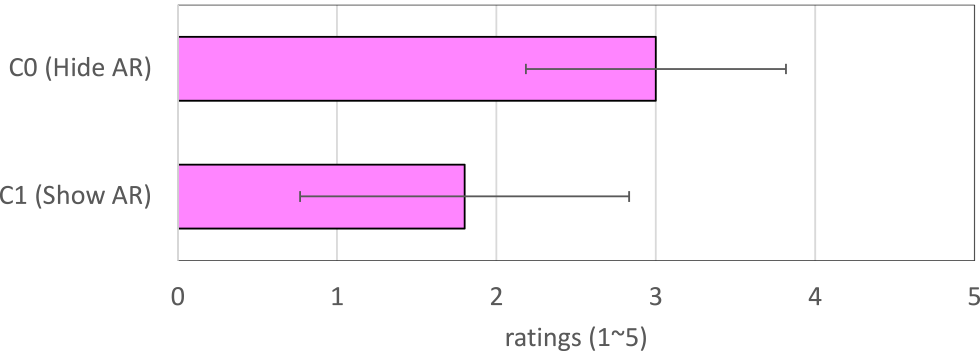
Fig. 8 Amount of anxiety experienced by participants throughout the experiment. The larger the ratings value, the greater the anxiety of the participants.
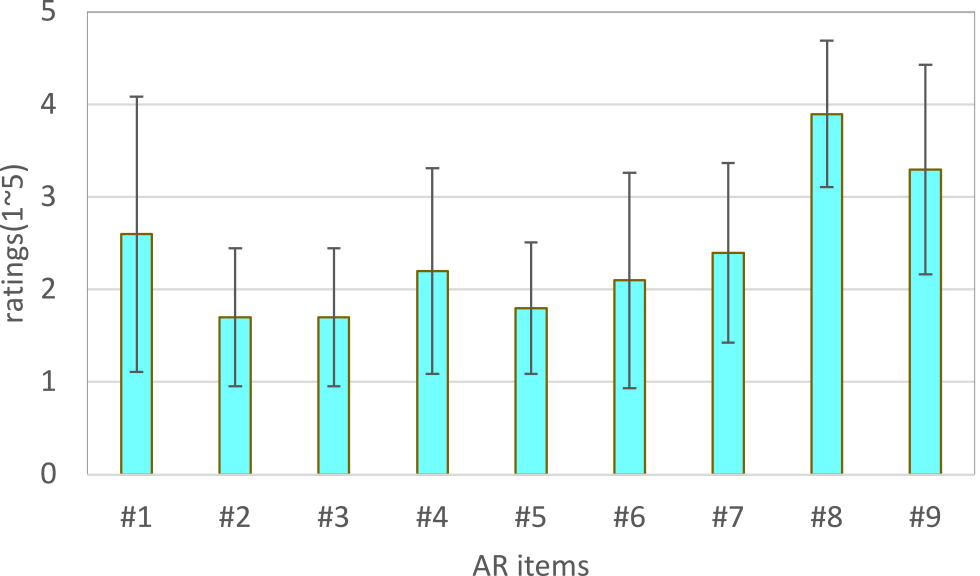
Fig. 9 Anxiety reduction effect of each AR content. The larger the rating value, the greater the anxiety reduction effect.
6. 考察
6.1 通信環境
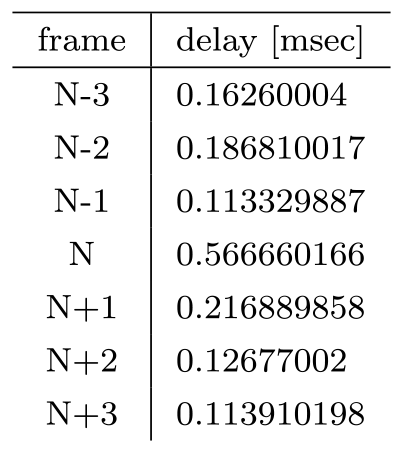
5章で述べたとおり,自動配送ロボットから送信されたデータをクラウドサーバを介してスマートフォンで受信する際の遅延は5G通信環境で平均160 msec,最大566 msec,標準偏差6.1 msecである.移動配送ロボットは速度4 km/hで走行するので,平均遅延160 msecの間に約17 cm移動する.つまり通信遅延によりARコンテンツの表示位置に生じる誤差は平均17 cmであり許容範囲と考えられる.最大遅延時には62 cmの表示誤差が生じるが,遅延の標準偏差は6.1 msecで更新頻度は10 Hzである.表2は最大遅延の前後3フレームの遅延時間であり,最大遅延の前後3フレームでは遅延時間が低下することが確認できる.すなわち,実験中に0.1秒間の最大62 cmの表示誤差が生じたが,このような遅延の発生頻度は稀であり,誤差の発生期間は0.1 sと微小な期間であることから評価に対する影響から除外できると考える.
Table 2 Delays around the maximum delay.
6.2 実験条件
実験参加者は2種類の条件で自動配送ロボットを観察した.C1(AR条件)はARコンテンツの表示されたデバイスで観察を行うが,C0(非AR条件)はコンテンツが何も表示されないデバイスをカメラのフレームを覗くように観察する.従ってC0(非AR条件)の実験は特殊な条件下での実験である.ただし,これは5章で述べたように実験条件を統一する目的で実施された.現時点では身体的な負担を同一とするためにこのような手法を採用したが,より自然な状況で比較するためにARグラス等のウェアラブルデバイスを用いた比較実験の実施が今後の課題である.
6.3 実験結果
1番目のアンケートで示唆されたARコンテンツの効果要因を調べるために,2番目のアンケートに対して考察する.#1(識別番号)から#9(危険区域)までの9種類のARコンテンツに対する実験参加者の印象は図9に示したが,この図から,自動配送ロボットの接近に対する不安低減に有効なARコンテンツは,平均点3.9点の#8(走行経路)と平均評価値3.3点の#9(危険区域)であることが示唆される.評価の高いARコンテンツを中心に考察を述べる.
6.3.1 #8(走行経路)について
3章で述べたように,#8(走行経路)は将来的な自動配送ロボットの接近の程度を示す情報であり,その目的は,パーソナルスペースの侵害に対する不快感の低減である.この情報は自動配送ロボットの現在地と目的地の間の経路すべてに表示される.従って,この情報を確認することで,本来ならば自動配送ロボットが観測者に近接した時点で初めて認知される近接の程度を,自動配送ロボットが走行を始めた時点で知ることができる.つまりこのARコンテンツは路上の観測者の自動配送ロボットに対する認知の先取りを促す.この情報提示の効果を具体例で記すと次のようになる.観測者が路上で友人と雑談をしており,観測者の50 m先のスパーマーケットから自動配送ロボットが出発したと仮定する.観測者は自動配送ロボットを目視で確認しており,観測者の方向に走行していることを認識しているとする.このとき,#8(走行経路)のARコンテンツが表示されていれば,ロボットがスーパーマーケットを出発した時点で,その数十秒後に起きる状況,すなわちロボットが接近した際に観測者自身の位置が自動配送ロボットの経路と重なるか否かを認知することができる.観測者自身が自動配送ロボットのパーソナルスペースへの侵入を不快と判断した場合は,あらかじめ場所を移動するなどの行動を選択することでパーソナルスペースの侵害に対する不快感を回避することができる.なお,仮に観測者がその場に立ち続けた場合でも,本実験の自動配送ロボットは観測者と接触することはなく,自動配送ロボットが観測者を迂回する形で走行する.この例のように,自動配送ロボットの近接を先取りして認知する点が#8(走行経路)の特徴であり,実験参加者に評価された点であると考えられる.つまり,C0(非AR条件)の実験では自動配送ロボットが実験参加者の居る地点に到着した時点で初めて不安感が解消されるが,C1(AR条件)の実験では自動配送ロボットが出発する時点で実験参加者の不安感がすでに解消されるという利点を持つ.
従来手法と比較すると,2章で述べたようにロボットが備えるレーザポインタやディスプレイを用いた情報提示では観測者とロボットの距離が離れた場合に視認性が低下する点や,RFIDを利用する手法は磁場発生用のコイルを地面に埋め込む必要があり,システムコストが高額になるだけでなく,新規ルートを開設する場合に工事が必要となり開設工期の長期化が懸念される.ARを用いて情報を提示する我々の提案手法は,観測者の視点に応じた適切な情報の提示が可能である.また,画像の撮影のみでマップを作成できるためにインフラに対する工事が不要である.従って,新規ルートの開設を低コスト,または短期間に抑える可能性がある.この2点がARコンテンツを用いる提案手法の利点となる.ただし,ARコンテンツの表示方法としてロボットに付けたマーカを認識してARコンテンツを表示させる手法も考えられるが,この方法はロボットが視野内に接近しなければARコンテンツを表示することができない.我々の手法はVPSを用いることでロボットが視野内に存在しない場合でも#8(走行経路)のような情報の提示を可能とする.たとえば別の歩行者や看板により遮蔽の影響を受ける場合でも我々の手法は情報提示が可能である.
6.3.2 #9(危険区域)について
続いて#9(危険区域)についての考察を行う.#9(危険区域)は直近の自動配送ロボットの危険区域を可視化した情報であり,パーソナルスペースに対する侵害や一定速度で近接する物体に対する不安低減を意図した情報提示である.評価の結果では,#8(走行経路)よりも不安低減の効果が低いことが示唆された.#9(危険区域)は周辺歩行者が観測することができる自動配送ロボットの直前の情報であり,実験参加者が,より時間軸の長い情報を提供する#8(走行経路)を支持した結果だと考えられる.
6.3.3 その他のARコンテンツ
残りのコンテンツ#1(識別番号)から#7(走行速度)についても評価値の高いコンテンツから順に考察する.図9で3番目に不安低減の効果が高いコンテンツは平均評価点2.6点の#1(識別番号)である.ただし,図に示すとおり他のコンテンツと比較して評価の分散が高い.この結果について実験参加者に対して追加でヒアリングを実施した.ヒアリングによれば,効果が低いと評価した参加者は識別番号の表示のみをコンテンツと捉えて評価しており,効果が高いと評価した参加者は識別番号と自動配送ロボットを結ぶ線分をコンテンツの一部と捉えて評価していることが確認された.識別番号は画面上に複数台の自動配送ロボットが表示された際に意味を持つ情報であり,今回の実験では不安低減につながる情報とは考えられない,一方,自動配送ロボットを結ぶ線分は画面上の自動配送ロボットの位置を指しており,この情報が一部の実験参加者の不安低減に寄与したと考える.平均評価点2.4点の#7(走行速度)については,2章で述べたとおり移動ロボットの速度と不安感が相関を持つことが知られており,実験参加者が移動速度を認識することで不安感が低減されたと考えられる.次に効果の高い情報は平均評価点2.2点の#4(目的地)と平均評価点2.1点の#6(距離)である.この両者は目的地に関する情報を含んでいる.目的地の情報によりユーザがロボットの進行方向を予測することでユーザの不安感が低減されたと考えられる.#2(走行状態),#3(出発地),#5(距離)はユーザの評価値が最も低く不安感の低減に効果の低いコンテンツである.#2は停止理由の通知を目的としたコンテンツであり,#3(出発地)は所在の通知を目的としたコンテンツである.さらに#5(距離)は参考情報の共有を目的としたコンテンツである.2章で述べたこれらのコンテンツの目的と5章の実験結果はおおむね一致する結果を示した.
実験結果の考察をまとめると,パーソナルスペースの侵害や近接に対する不安低減を目的とした情報提示が効果的な役割を果たすことが示唆された.
7. むすび
本研究では,自動配送ロボットの周辺歩行者の不安感を低減するための情報提示の方法について検討した.課題解決手段として,自動配送ロボットに起因する不安要因を将来的な実用シーンから予測して9種類のARコンテンツを提案した.次に提案手段の効果を検証するために実証実験を実施した.実験環境構築のため,自動配送ロボットが屋外を走行する筑波大学に5Gアンテナを施設し,提案した9種類のARコンテンツをスマートフォンに表示するシステムを構築した.実験では,ARコンテンツを観察した実験参加者からアンケートを収集し,パーソナルスペースの侵害や物体の近接を事前に可視化するARコンテンツが周辺歩行者の不安感を低減することを確認した.
今後は,自動配送ロボット以外のARコンテンツの提示効果についても研究を進めたい.
参考文献
- [1] 国土交通省:令和3年度 宅配便取扱実績について,入手先〈https://www.mlit.go.jp/report/press/content/001494500.pdf〉(参照2023-03-19).
- [2] Nakashima, K. and Sato, H.: Personal distance against mobile robot, The Japanese Journal of Ergonomics, Vol.35, No.2, pp.87–95 (1999).
- [3] 津留直彦,伊佐治和美,金子 弘,土居俊一:運転者の視覚認知機能の解明とモデル化の研究,計測と制御,Vol.45, No.8, pp.677–682 (2006).
- [4] 小林正啓:次世代ロボットの直面する法的課題について,計測と制御,Vol.49, No.6, 373–378 (2010).
- [5] 岩本誠吾:致死性自律型ロボット(LARs)の国際法規制をめぐる新動向,産大法学,No.47, Vol.3/4, pp.330–363 (2014).
- [6] Hiroi, Y. and Ito, A.: Influence of the size factor of a mobile robot moving toward a human on subjective acceptable distance, Mobile robots-current trends, pp.177–190 (2011).
- [7] Ishiguro, H., Ono, T., Imai, M., Maeda, T., Kanda, T., and Nakatsu, R.: Robovie: an interactive humanoid robot, International Journal of Industrial Robotics, Vol.28, No.6, pp.498–503 (2001).
- [8] Sakai, T., Nakajima, H., Nishimura, D., Uematsu, H., and Kitano, Y.: Autonomous Mobile Robot System for Delivery in Hospital, Technical Report of Matsushita Electric Works, Vol.53, No.2, pp.62–67 (2005).
- [9] Kouno, T. and Kanda, S.: Robot for Carrying Food Trays to the Aged and Disabled, Journal of the Robotics Society of Japan, Vol.16, No.3, pp.317–320 (1998).
- [10] Datteri, E., Asuni, G., Teti, G., Laschi, C., Dario, P. and Guglielmelli, E.: Experimental analysis of the conditions of applicability of a robot sensorimotor coordination scheme based on expected perception, In 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(IEEE Cat. No.04CH37566), Vol.2, pp.1311–1316 (2004).
- [11] Prassler, E., Bank, D. and Kluge, B.: Key technologies in robot assistants: Motion coordination between a human and a mobile robot, Transactions on Control, Automation and Systems Engineering, Vol.4, No.1, pp.56–61 (2002).
- [12] 岩田浩康,星野勇人,森田寿郎,菅野重樹:人間共存ロボットのための全身触覚インタフェース,日本ロボット学会誌,Vol.20, No.5, pp.543–549 (2002).
- [13] Van Wichert, G. and Lawitzky, G.: Man-machine interaction for robot applications in everyday environments., Proceedings 10th IEEE International Workshop on Robot and Human Interactive Communication. ROMAN 2001 (Cat. No.01TH8591), pp.343–346 (2001).
- [14] 松丸隆文,草田 享,岩瀬和也:光線を用いて予定経路を表示する機能をもつ移動ロボットの開発,日本ロボット学会誌,Vol.24, No.8, pp.976–984 (2006).
- [15] Matsumaru, T. (2007, April): Mobile robot with preliminary-announcement and indication function of forthcoming operation using flat-panel display, Proceedings 2007 IEEE International Conference on Robotics and Automation (pp.1774–1781). IEEE.
- [16] 小田英雄,久保田創一,岡本栄晴:RFIDを利用した安全運転支援システムにおける位置・進行方向・速度情報による安全,情報処理学会研究報告高度交通システム(ITS), 2006(103 (2006-ITS-026)), pp.31–36 (2006).
- [17] 一般財団法人運輸政策研究機構:平成25年版 地域交通年報 (2013).
- [18] Sommer, R.: Studies in personal space, Sociometry, Vol.22, pp.247–260 (1964).
- [19] Nakauchi, Y. and Simmons, R.: A Social Robot that Stands in Line, Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.357–364 (2000).
- [20] Huettenrauch, H., Eklundh, K. S., Green, A. and Topp, E. A.: Investigating Spatial Relationships in Human-Robot Interaction, Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.5052–5059 (2006).
- [21] Walters, M. L. et al.: The Influence of Subjects' Personality Traits on Personal Spatial Zones in a Human-robot Interaction Experiment, International Workshop on Robot and Human Interactive Communication (RoMan2005), pp.347–352 (2005).

井上 円madoka.inoue@rakuten.com
2016年 名古屋工業大学にて博士(工学)を取得.2016–2017年 名古屋工業大学特任助教授.2021–2022年筑波大学研究員.アイホン(株)を経て,2021年から楽天モバイル(株).動画像処理・パターン認識・機械学習・HCIの研究に従事.INTERACTION2023インタラクティブ発表賞(PC推薦)受賞.

幸田 健介
2013年大阪大学大学院基礎工学研究科博士前期課程修了.工学修士.その後,楽天(現:楽天グループ)(株)に入社しデータベース管理業務に従事し,2019年より楽天技術研究所に所属.自律移動ロボットの研究開発業務や5Gを活用した数多くの未来体験の研究開発業務に従事.

チェング ケルビンkelvin.cheng@rakuten.com
2009年The University of Sydney大学院にて博士(情報工学)を取得.2009年よりオーストラリアのCSIRO,シンガポール大学研究員,2017より楽天グループ(株)楽天技術研究所に入社し,HCIの研究領域の研究員を歴任.2020年より楽天モバイル(株)5G本部R&Dグループマネージャーとして,5Gを活用したXR未来経験を推進している.

山中 敏正yamanaka.toshimas.ge@u.tsukuba.ac.jp
2004年博士(感性科学)取得(筑波大学).現在,筑波大学教学マネジメント室長.1982年–1994年,旭光学工業(株)工業デザイン室で研究員.1994年筑波大学講師,2002年同助教授,2005年より同芸術系教授.2019年より,デザイン学学位プログラムで教授を務める.2012–2015年日本デザイン学会会長,現在IASDR(国際デザイン学会連合)会長(2020–2022).日本感性工学会顧問,千葉大学工学部工業意匠学科・同大学院工業意匠学専攻修了.1990–1991年IIT, Chicago.2002–2003年TU Delftにて客員研究員を務める.

益子 宗
2008年 筑波大学大学院システム情報工学研究科にて博士(工学)を取得.同年,楽天グループ(株)楽天技術研究所に入社し,コンピュータビジョンやHCIの研究領域のマネージャーを歴任.2019年より筑波大学芸術系教授,2020年より楽天モバイル(株)5G本部部長として,5Gを活用したサービス企画や領域横断的なオープンコラボレーションを推進.2023年より芝浦工業大学デザイン工学部教授.
採録日 2023年3月16日