看護師のための自動評価機能を持つ指差し呼称訓練システムの開発と評価
Development and Evaluation of Finger Pointing and Calling Training System with Automatic Evaluation Function for Nurses
1. はじめに
ヒューマンエラーの防止手段の1つとして,産業界では以前より指差し呼称が用いられている.指差し呼称とは,旧国鉄を発祥とする安全確認のための動作であり,「対象を目視し,指を差す」「腕の振り上げ」「腕の振り下ろし」「確認のための呼称の発声」といった要素によって構成されるものである[1].芳賀らは,指差し動作と呼称をそれぞれ単独で実施する場合も行わない場合に比べてミスが低減するが,両方行うことによってさらにミスが低減することを示している[2].
医療事故情報収集等事業2020年年報[3]によると,医療事故として報告された事象について,当事者職種として看護師が約45%を占めており,2020年年報分の集計表[4]によれば,個別の発生要因の中で最大の約13%を占める要因は「確認を怠った」ことであった.さらに,ヒヤリ・ハット事例の報告については,当事者職種の約76%が看護師であり,「確認を怠った」が個別の発生要因の中で約22%を占めていた.
この「確認を怠った」という要因に対する対策として病院業務の中で指差し呼称による確認を実施することが,先の文献[3]の現地状況確認調査の中で述べられている.また,川田らは,看護系大学生に確認作業を伴う看護師業務を模擬した作業を行わせる実験を行い,指差し呼称を行うことで前頭葉の血中酸素ヘモグロビン量が大きく変動することを確かめ,看護師の与薬準備作業において指差し呼称の有効性が示唆されたと述べている[5].
富山県リハビリテーション病院・こども支援センターでも,看護師業務内の確認作業に指差し呼称を組み入れる取り組みを行っている.しかし,看護師からの意見として,「慣れるまでは恥ずかしさがある」「しっかりとやる人といいかげんにやる人がいる」「どこまでしっかりと指差し呼称をすればよいか分からない」というものがあり,評価のある訓練を増やすことが必要とされていると思われる.その一方で,「人が変わるため毎年教育が必要だが,指差し呼称の他にも教えることが多い」という意見もあり,単純に訓練の時間を増やすことは簡単ではない.そのため,看護師が自主的な訓練を行うことを支援する仕組みが必要であると思われる.
これまでにも,看護師の指差し呼称を徹底するための,業務内で使用可能な指差し呼称検知システムの開発が行われている[6]-[8].このシステムでは,病棟内を移動する看護師に対応すること,患者のプライバシーを巻き込まないようにすること,手指衛生や患者と接する際に主業務を阻害しないことを条件として,看護師の上腕部に装着したウェアラブルな無線加速度・角速度センサと,頭部に装着した小型無線マイクを用い,機械学習を用いた行動識別と音声認識を併用することで,業務内の様々な動きの中から,指差し呼称の検知を行っている.2013年3月および2014年3月に行われたこの指差し呼称検知システムを用いた模擬業務の実験では,現場の看護師37名を被験者として,適合率99%再現率92%の検知精度を実現している.ただし,このシステムは指差し呼称の検知のみ行っており,検知結果の看護師本人への直接のフィードバックや,多段階の評価などは行っていない.そのため,指差し呼称の徹底のための事後の実施有無のチェックに用いることはできても,看護師自身による指差し呼称実施の訓練に用いることはできず,病院内での医療安全推進活動に組み込まれることはなかった.
そこで我々は,指差し呼称による確認について,看護師が自主的に訓練できるシステムを開発した.指差し呼称による確認は業務の手続きの中で行うものであるため,先の指差し呼称検知システムと同様に業務を阻害しないことが必要であり,また,自主的な訓練に使用するものであるため,システムを使用するための手間が少ないことが望ましい.本システムはこのような条件を満たしており,実施した指差し呼称についてその場で評価を行い,実施直後に他者を介することなく本人に評価結果をフィードバックするものである.これにより,おざなりな指差し呼称を行った場合の気づきや,評価が存在することによる訓練に対するモチベーションの向上が期待でき,確認漏れによるインシデントを削減する一助となると考えている.
本稿では,以下第2章で関連研究について述べ,第3章で開発したシステムの構成を述べる.第4章で本システムの病院への導入・試用実験およびアンケートとその結果について述べ,第5章で検討を行い,第6章でまとめる.
2. 関連研究
看護師業務の訓練に関して,センサを用い行動情報の取得や支援を行う研究はこれまでいくつか行われている.Grünerblらは,Googleグラス,スマートフォン,スマートウォッチ,ロケーションセンサを装着した看護師に対し,模擬患者のいる模擬病室で,心肺蘇生が必要な救急状況に対する訓練を行い,その際の行動をセンサデータとして取得している[9].またHuangらは,Kinectを用い看護師の関節に色マーカを装着することで,患者をベッドから車いすに移送する際の看護師の体の動きを取得し,ベテランの看護師の動きと比較することで,移送の技能を評価するシステムを構築している[10].しかし,これらは,指差し呼称に対応しておらず,後者に関しては環境側にあらかじめセンシングする機器の設置が必要となる.
また,指差し呼称を検出する研究としては,岩崎らによる,頭部に無線マイクを,手首に小型無線加速度・角速度・地磁気センサを装着し,首にAndroid端末を掛け,指差し呼称の実施を検出し,指差し呼称の回数・時刻の記録により他者からの評価を可能とするシステムの研究がある[11].このシステムは,環境側に機器を設置することなく,装着型の機器のみでシステムが構成されており,可搬性に優れている.しかし,看護師を対象とした場合,手首に装着するセンサは手指衛生時や患者に接する際の問題となる.また,このシステムでは使用者へのフィードバックは検討されていない.このほかにも,濱田らによる,移動体の運転士の監視を目的とし運転中に行うべき挙動の1つとして指差し呼称を検知することを含むシステムが存在する[12].このシステムでは,移動体の経路等から算出できるタイミングと指差し呼称のタイミングを比較し,指差し呼称の遅れや不実施に対しアドバイスとして注意や警告を行うものとなっている.しかし,運転台から移動しない運転士の挙動検知を前提としており,病棟内を移動する看護師に対しては適用できない.
3. システム構成
本システムは,業務中でない看護師が実施する訓練を支援することで,指差し呼称の実施を定着させるためのものである.そのため,本システムが対象の確認を行うものではなく,看護師が正しく指差し呼称を実施しているか否かを評価するものとしている.
3.1 システム概要
本システムは,図1に示すように,看護師の頭部に装着されるヘッドセットマイク,上腕に装着される小型無線加速度・角速度センサ,ポケット等に収納されるAndroid端末,看護師近傍のカート等に置かれる無線LANアクセスポイントおよびPCにより構成されている.これにより,患者との接触時や手指衛生時に問題となる前腕に機器を装着することなく,また,業務手順を中断させることなく指差し呼称を評価する.
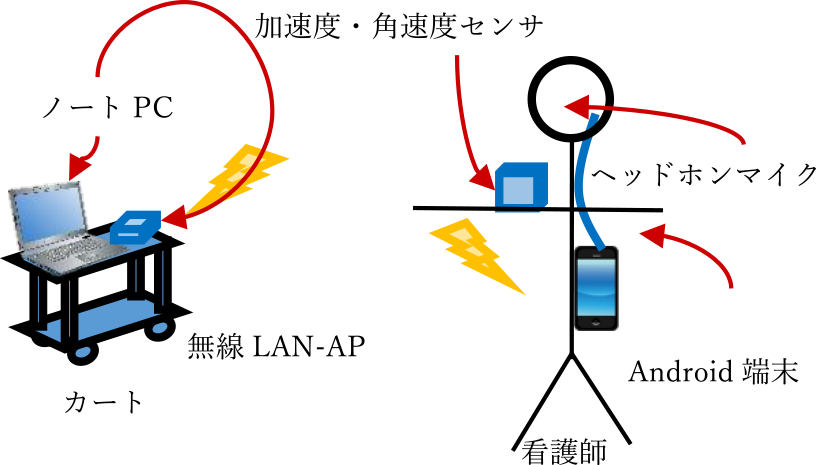
Fig. 1 Configuration of system hardware.
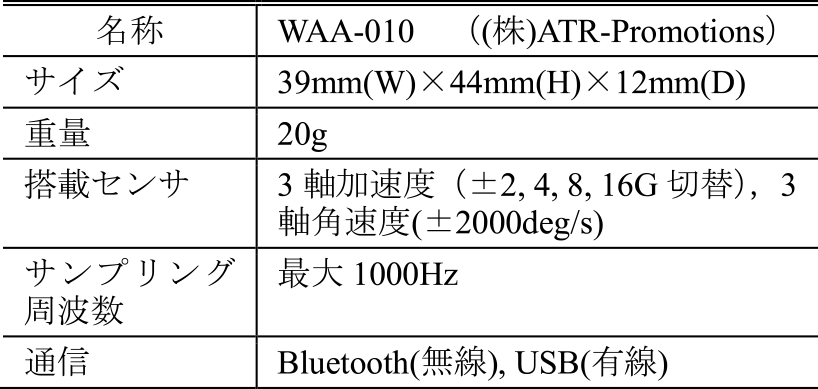
上腕に装着する小型加速度・各速度センサの仕様を表1に示す.本システムでの使用時にはサンプリング周波数を100 Hzに,加速度のレンジを±2 Gに設定しており,Bluetooth通信によりAndroid端末にセンサ情報をリアルタイムで送信する.送信される加速度データの分解能は1 mG,角速度データの分解能は0.1 deg/sである.このセンサは,右上腕に手を自然に垂らした状態でX軸が真下を向きZ軸が右真横を向く向きにアームバンドを用いて固定するが,アームバンドを含めても十分小型軽量であり動きの邪魔になることはない.
Table 1 Specification of .the sensor worn on the upper arm.
Android端末には,ヘッドホンマイクからの看護師の音声データとBluetoothで受信する上腕センサデータを収集してPCに送信する機能と,PCから送られてきたフィードバック内容を音声合成により出力する機能を持つソフトウェアが導入されている.また,PCにはセンサデータから特徴量を抽出,指差しの行動要素の識別,音声データからの音声認識と呼称音声の抽出,行動要素と呼称音声の統合による指差し呼称の検知,検知した指差し呼称に関する行動要素からの評価値の決定と評価によるフィードバック音声内容のAndroid端末への送信の機能を持つソフトウェアが導入されている.
ただし,一般の指差し呼称では実施時に「よし」という発声を行う場合が多いが,病院の看護師らとの打ち合わせにおいて,荒々しい印象を受けるとの意見から,「確認(かくにん)」という言葉を指差し呼称時の呼称に発声すべき言葉として用いている.
3.2 指差し呼称評価手法
本システムで行われている指差し呼称評価の処理の概要を図2に示す.
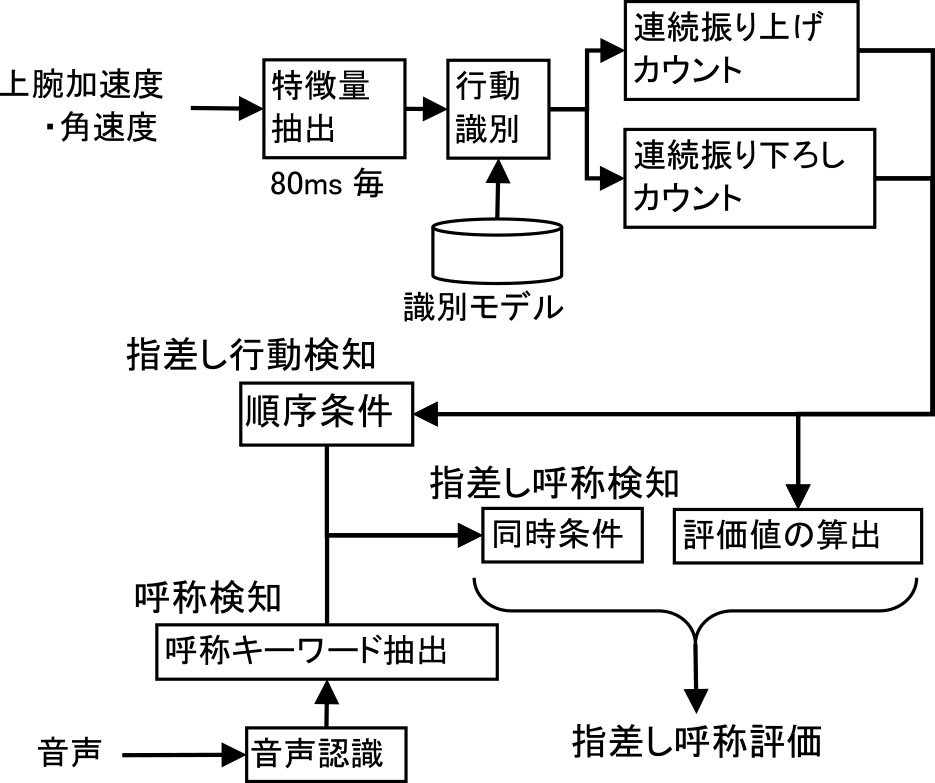
Fig. 2 Process of finger point and calling evaluation.
上腕のセンサから得られる加速度・角速度データは,特徴量抽出を経て,行動識別により「(指差し呼称の)振り上げ」「(指差し呼称の)振り下ろし」「その他」の3種類に識別される.行動識別結果は80 msごとに出力されるが,「振り上げ」「振り下ろし」がそれぞれ一定時間継続すること,「振り上げ」の後に「振り下ろし」が行われること,音声認識結果に「かくにん」という呼称キーワードが含まれ,それが指差し呼称の行動と同時であることを条件として,指差し呼称の検知および評価を行っている.
以下に,特徴量抽出,行動識別,指差し呼称評価の詳細を述べる.
3.2.1 特徴量抽出
上腕の小型加速度・角速度センサから得られるデータは時系列データであるため,スライディングウィンドウ法を用いて一定のデータ区間に区切り,その区間から得られるデータから機械学習のための特徴量を抽出する.
図3に示すように,スライディングウィンドウ法におけるデータ区間の幅をウィンドウ幅といい,本システムでは160 msをウィンドウ幅としている.また,データ区間の移動量(重複を許す)をスライド幅といい,本システムでは80 msをスライド幅としている.上腕の小型加速度・角速度センサのサンプリング周波数は100 Hzであるため,80 msごとに6軸合計で96個のデータが取り出されることになる.
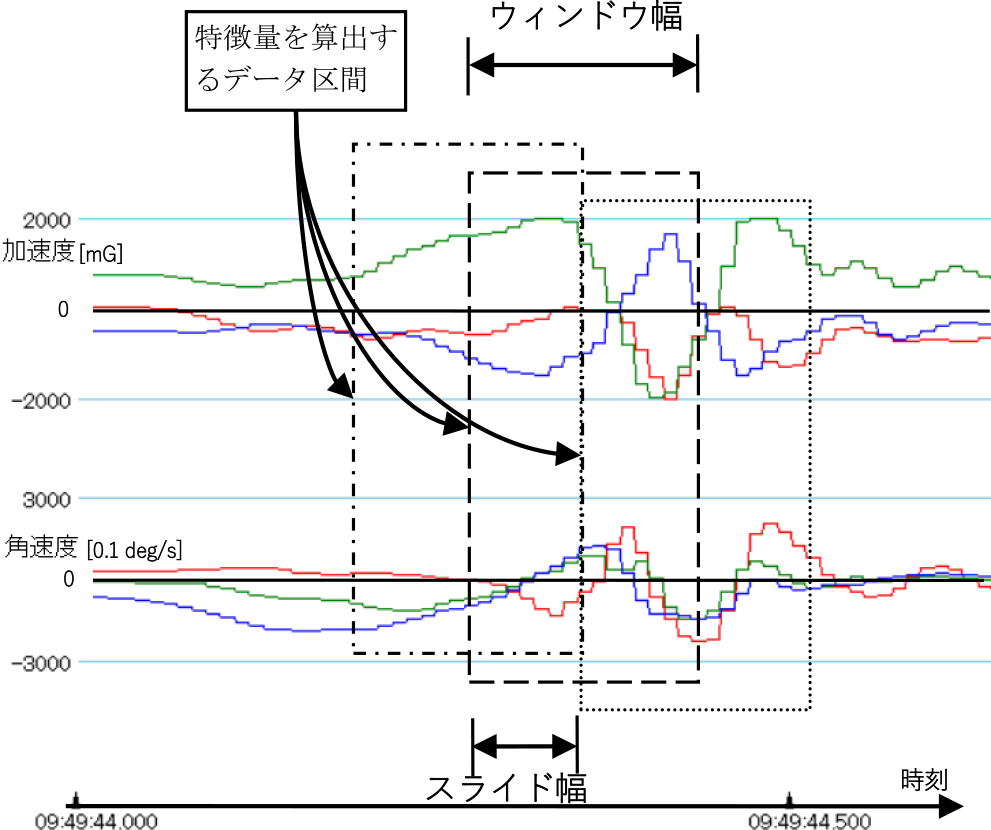
Fig. 3 Sensor data and sliding window method.
スライディングウィンドウ法により取り出されたデータから,先行研究である[6]-[8]と同じ2次多項式近似によって特徴量を取得する.2次多項式近似とは,取り出されたある軸のデータを$y_1,y_2,...,y_n$(nはウィンドウ幅によって定まるデータの数)とし,これに対応する値として,${x_1},{x_2},...,{x_n}$を${x_i} = i - ( {n + 1} )/2$と設定し,得られる(${x_i}$,${y_i}$)に対して,最小2乗法により2次多項式$y = a{x^2} + bx + c$のフィッティングを行うものである.2次多項式の係数$a$,$b$,$c$は式(1)に示す方程式を解いて求めることができるが,係数$a$は,データが下に凸か上に凸かの度合いを,係数$b$は平均した傾きを,係数$c$は区間のデータの大きさを表す特徴量として使用できる.\[\left( {\begin{array}{*{20}{c}}{\sum {x_i^4} }&{\sum {x_i^3} }&{\sum {x_i^2} }\\{\sum {x_i^3} }&{\sum {x_i^2} }&{\sum {{x_i}} }\\{\sum {x_i^2} }&{\sum {{x_i}} }&{\sum 1 }\end{array}} \right)\left( {\begin{array}{*{20}{c}}a\\b\\c\end{array}} \right) = \left( {\begin{array}{*{20}{c}}{\sum {x_i^2{y_i}} }\\{\sum {{x_i}{y_i}} }\\{\sum {{y_i}} }\end{array}} \right)\](1)
2次多項式近似により,各軸に対して3つの特徴量が得られるため,本システムでは加速度・角速度の6軸を合計して18次元の特徴量を使用している.
3.2.2 機械学習による行動識別
本システムでは,特徴量抽出で得られた18次元の特徴量より,機械学習による識別モデルに基づいて3種類の動作「(指差し呼称の)振り上げ」「(指差し呼称の)振り下ろし」「その他」に識別している.この識別には[6]-[8]と同様に,教師あり機械学習手法の1つであるSVM(Support Vector Machine)を採用している.SVMの計算にはlibSVM [13]を使用し,カーネルにはRBFカーネルを用いている.
我々は本システムの開発にあたって,管理者かつベテランの看護師である看護部長らが模範的な指差しであると認めた動作がしっかりとした正しい指差し呼称の動作であり,そこから外れた動作は本人が指差し呼称を実施したつもりであってもおざなりな動作であると定めた.そのため,機械学習に用いる教師データには,看護部長ら3名分とそれらの管理者が模範的な指差し呼称をしていると認めた看護師3名分の合計6名分の指差し呼称動作のデータを使用している.
3.2.3 行動識別履歴からの指差し呼称評価
行動識別の結果は,スライド幅である80 msごとに計算されるが,これと比較して指差し呼称における「振り上げ」「振り下ろし」の動作は長い時間継続するため,一回の指差し呼称実施に際して複数回の「振り上げ」「振り下ろし」の識別が行われる.一方で,おざなりな指差し呼称を行った場合のように教師データとやや異なる動作が行われた場合,「振り上げ」「振り下ろし」動作として識別されにくい傾向がある.このことを利用して,指差し呼称検出に関わった「振り上げ」動作および「振り下ろし」動作の総和の時間を指差し呼称の評価指標に用いることにした.より具体的には,指差し呼称が実施されたと判断された場合,その判断直前の行動識別結果履歴より,連続する「振り上げ」および「振り下ろし」の回数をカウントし,それぞれの回数が8回以上の場合を3点,それぞれ8回未満6回以上の場合を2点,それ以外の場合を1点とする3段階の評価とした.
評価を3段階とした理由は,指差し呼称が必要な状況において,指差し呼称の実施を最低限とするが,実施した中でも,おざなりな指差し呼称としっかりした指差し呼称を区別することが訓練システムとして必要であり,更にしっかりとした指差し呼称についても,十分なものと模範的なものを区別することでシステムの試用者がより高い評価を目指すという効果を狙ったものである.3段階に分ける回数の値の基準は,指差し呼称の実施が含まれる過去の模擬業務訓練時の看護師のセンサデータおよびビデオデータより経験的に設定したものを,病院の看護師長らによる試用評価によって微調整したものである.
3.3 音声によるフィードバック
本システムによる指差し呼称の評価は,その場で音声によりフィードバックされる.これは,指差し呼称の実施の際に,看護師の特段の操作を必要とすることなく,実施した指差し呼称とその評価をすぐに結び付けることができるようにするためである.
フィードバックの内容としては,評価値が3点の場合「大変しっかりできています」,2点の場合「しっかりできています」,1点の場合「まあまあです」とした.これらの言葉は,短くかつ評価の内容や段階の違いが明確に分かることを条件として選んだものである.また,指差し呼称による確認を実施したことに対し,看護師の意欲を落とさないため,否定的な言葉を用いないようにしている.
4. システムの導入と試用実験
本システムは開発後,富山県リハビリテーション病院・子供支援センターに導入され,試用実験が実施された.なお,この実験については,倫理審査委員会による審査を経て承認され,適切に実施されたものである.
4.1 試用実験環境
本システムの利用による看護師への影響を調べるため,導入に先立って試用実験を実施した.この試用実験は,2016年11月7日から2016年12月9日までの約一ヵ月間,富山県リハビリテーション病院・子供支援センターにある4か所のナースステーションに1セットずつ本システムを設置して行われた.設置されたシステムには,使用手順を付帯させており,システムの起動や停止,充電等についても,看護師らが自ら行うものとなっている.
看護師らには,このシステムの機能や実験目的についての説明を配布したうえで,システムの使用は任意であり,タイミングについても自由であるが,可能であれば実験期間の最初の10日間と最後の10日間の両方で使用するように依頼した.また,利用手順の中で,使用前に名前をマイクに向かって話してもらうようにしており,本システムの使用データが個人と結び付けられるようにした.
4.2 試用実験結果
試用実験終了後に,記録された音声を確認したところ,名前を聞き取ることのできたシステム使用者数は97名であり,実験期間の最初の10日間と最後の10日間の両方の期間で本システム使用していることが確認できた人数は33名であった.
この33名分について,実験期間中の最初の指差し呼称に対する本システムの評価と,最後の指差し呼称対する本システムの評価を表2にまとめる.この表では,音声を耳で聞いたとき,指差し呼称のために「確認」と発声していることが分かるが,腕の行動要素の識別結果が十分でなく,結果として指差し呼称を実施していると検知されなかったものを,反応なしとしている.また,最初の評価と最後の評価に対し,使用者ごとに線を引くことで,期間における評価の変化を示したグラフを図4に示す.
Table 2 Distribution of evaluation grade.
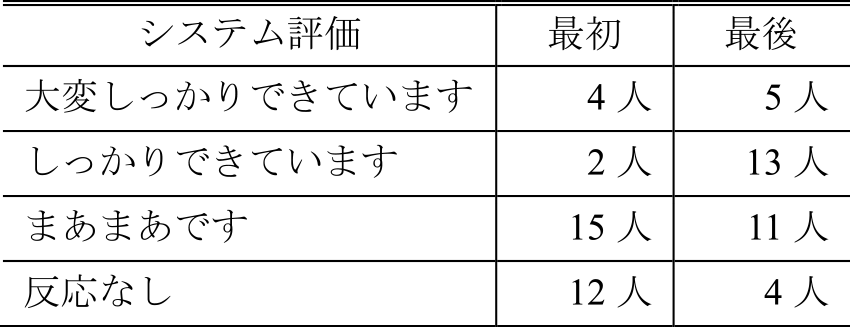
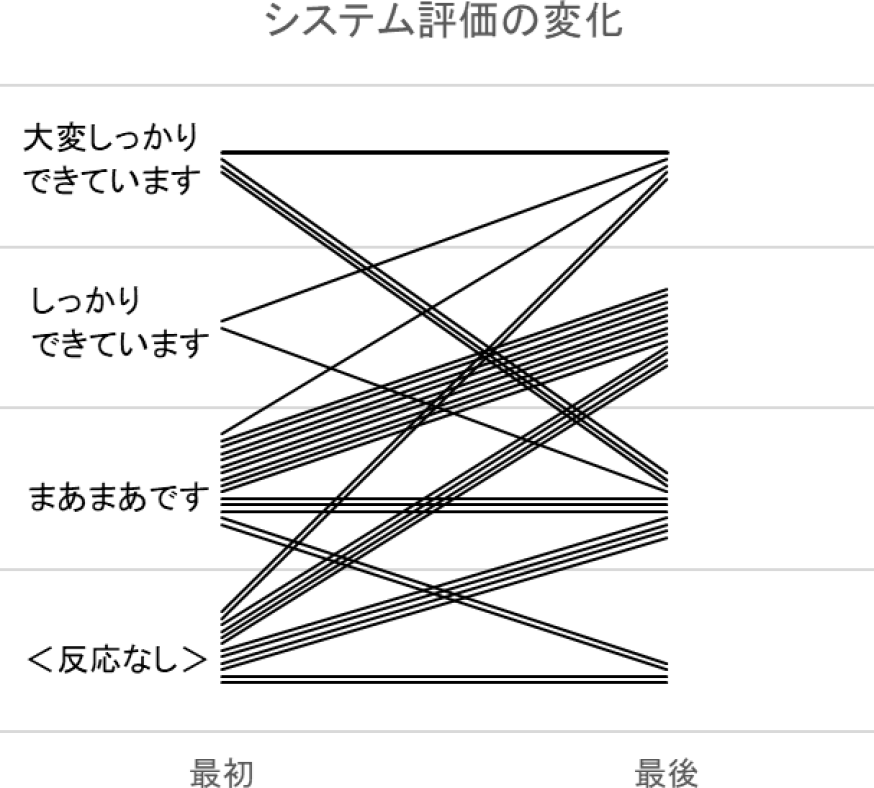
Fig. 4 Individual transition of system evaluation results.
表2より,最上位の評価である「大変しっかりできています」の人数はあまり変わらないものの,評価されない「反応なし」および「まあまあです」と評価された人数が減り,「しっかりできています」と評価された人数が増えていることが分かる.また,図4からも評価値が上昇している人が多いことが分かる.これについてノンパラメトリック検定の1つであるウィルコクソン符号順位検定を実施したところ両側p値が0.019となったため,評価に変化が無いという帰無仮説が5%水準で棄却され,全体として評価値の上昇が有意であるといえる.ただし,図4からは評価値が下降している人も一定数いることも見て取れる.
4.3 アンケート調査とその分析
試用実験期間の終了後に,本システムの使用感等に関する記名式のアンケート調査を行った.アンケートの内容については付録Aに示す.
アンケートには,合計92名分の回答があったが,回答に空欄がなく先の試用実験と名前の対応が確認できたのは67名分であり,さらに実験期間の最初と最後の両方の期間で使用した名前と対応付けられたアンケート結果は27名分であった.
まず,システム使用後の自身の変化に関する項目についての92名分の集計結果を図5に示す.指差し呼称の定着・改善・意識向上に関して,「そう思う」「まあそう思う」という意見が過半数を占め,逆に「あまりそう思わない」「そう思わない」という意見は2割以下となっている.これは,本システムがおおむね有用なものとして受け入れられたことを示していると考える.
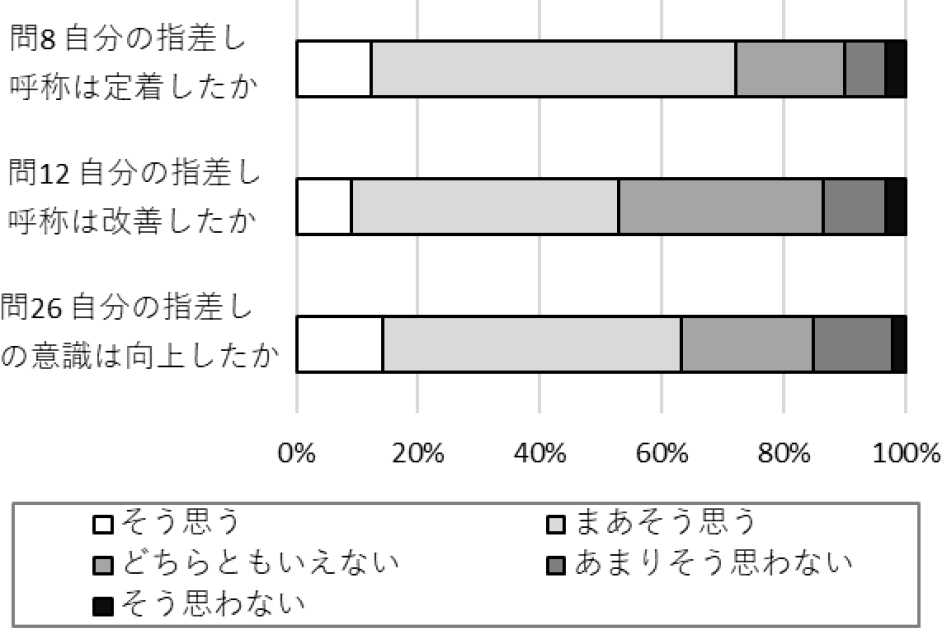
Fig. 5 Result of Questionnaire on own changes.
次に,システムの全体印象に対する質問(問21)を除くリッカート法による質問と,点数を解答とする質問(問13,16)の枝問のうち「それ以外」を除く質問の合計29問の回答について,67名分のデータより因子分析を行った.因子分析は,エクセル統計[13]を用い,因子数を7とし・Promax回転(指数3),主成分分析法を採用した.因子分析結果の因子パラメータ行列を,付録Bに示す.この因子分析結果の累積寄与率は61%である.
この因子分析結果の各因子について,パラメータ行列の重みから以下のように名前を付けた.
因子1:「システムの効果の高さ」
因子2:「システムの使いやすさ」
因子3:「他人と協調しない」
因子4:「システム機器への懸念」
因子5:「使用中のシステムへの留意」
因子6:「新人度」
因子7:「被教授度」
因子1は,アンケート問8,10など本システムの利用後の指差し呼称の定着に関する項目の係数が高いため「システムの効果の高さ」と命名した.また,因子2は,問3,4などの音声の聞き取りやすさや機器装着の容易さに関する項目の係数が高いため,「システムの使いやすさ」と命名した.因子3は,問16(B),13(C)といった,複数人での協議の項目の係数が負である一方で問16(A),13(A)といった行動しない項目の係数が高いため「他人と協調しない」と命名した.因子4は,問19,17,18といったシステム使用時の支障,難しさ,不安に関する項目の係数が高いため,「システム機器への懸念」と命名した.因子5は,問9の被監視感の係数と,問6のシステム使用時の指差し呼称への意識に関する係数が高いため,「使用中のシステムへの留意」と命名した.因子6は,問16(C)の他者への指導と,問1,2の経験年数に対し,負の方向に高い係数を持つため「新人度」と命名した.因子7は,問13(E)の他人からの指導の項目の係数が高い一方で,問13(B)の一人での行動の項目に対し負の係数を持つため,「被教授度」と命名した.
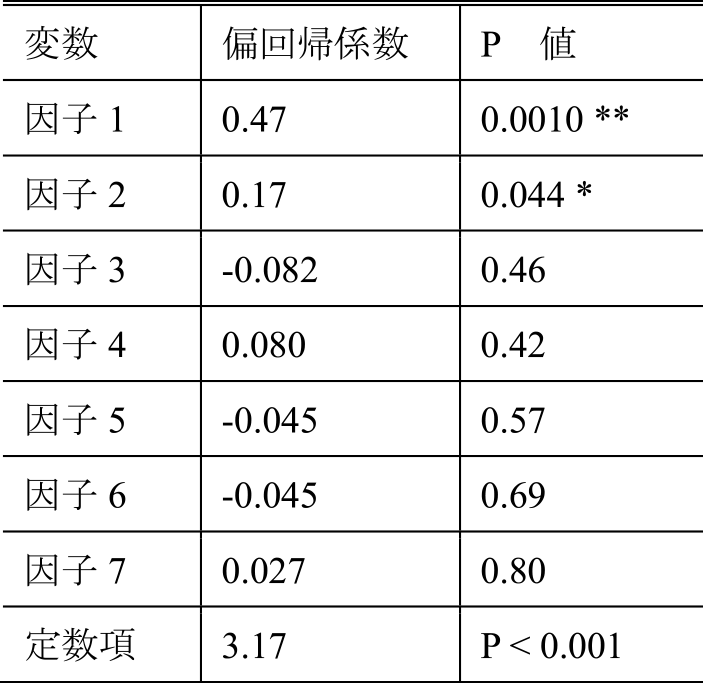
この主成分分析から得られる因子得点について,図4に示した27名分の各個人の評価の上昇値との重回帰分析を行った.その結果を表3に示す.ここで,評価の上昇値とは,本システムによる指差し呼称の評価について,「評価なし」0点,「まあまあです」1点,「しっかりできています」2点,「大変しっかりできています」3点と,各評価の点数を用い,最後の指差し呼称の評価点から最初の指差し呼称の評価点を差し引いたものである.
Table 3 Result of multiple liner regression analysis for evaluation grade improvement.
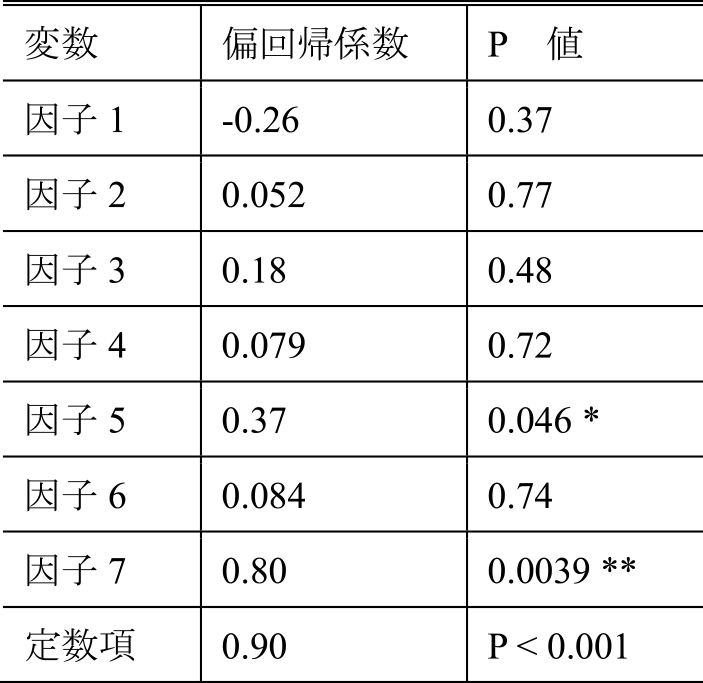
この結果より,「因子7「被教授度」が1%水準で,因子5「使用中のシステムへの留意」が5%水準で有意であることから,教えてもらったと感じている人や本システムを使用していることを意識している人の評価が上昇する傾向にあることが分かった.
次に,因子得点とアンケートの問21「システムの全体印象」との重回帰分析を行った.その結果を表4に示す.この分析では,因子1「システムの効果の高さ」について1%水準で,因子2「システムの使いやすさ」について5%水準で有意となった.
Table 4 Result of multiple liner regression analysis for total impression of the system.
5. 検討・考察
本システムは,4.1節で述べたように2016年に病院にて試用実験が行われ,その後2017年度より改良を経ながら,春の新人を対象とする「新任看護職員指差し呼称確認動作研修」および夏季のほぼ全看護職員を対象とする「指差し呼称確認動作繰り返し研修」(ただしOJT形式)という毎年の研修の中で現在(2022年)まで利用され続けている.また,この病院では,看護安全委員会が医療安全推進活動として指差し呼称の実践に関する複数の活動を行っており,本システムを活用した教育・研修の実施のほかに,2015年4月より現在に至るまで,指差し呼称による確認実施の基準作成,推進リーダの任命や現場巡回,入院患者向けパンフレットへの指差し呼称実施の記載などの取り組みを行っている.
このような取り組みの中で,看護師の薬剤に関するヒヤリ・ハット事例等のインシデント件数は,2011年度に看護師89名に対し135件,2013年度に94名に対し149件,2015年度に126名に対し182件,2017年度に174名に対し134件となった.図6に看護師1名あたりのインシデント件数を示すが,2017年の看護師1名あたりのインシデント件数は本システム導入前の2015年以前に比べて約半数と削減されている.この削減は,本システムを活用するに至った総合的な取り組みの結果ではあるが,1つの要因として,本システムの導入により指差し呼称の実施が意識されるようになったことがインシデント数削減に寄与していると考えられる.
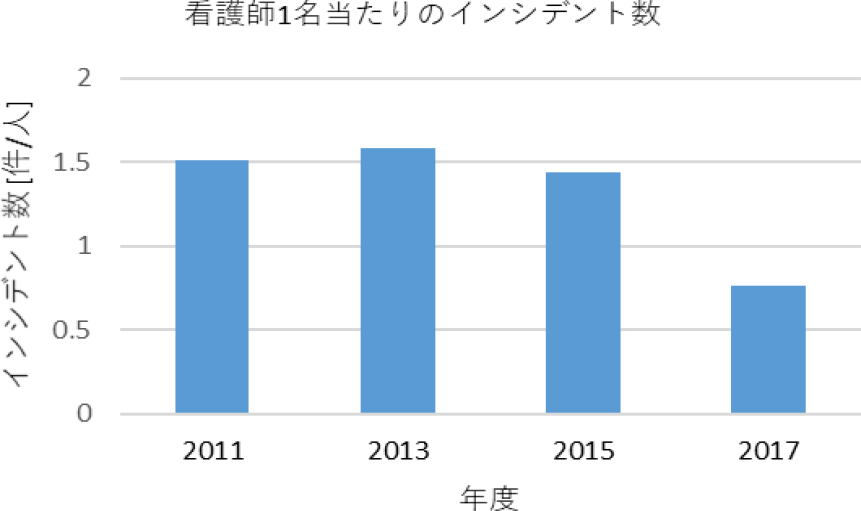
Fig. 6 Number of incidents per nurse.
本システムによる直接の効果として,図4に示されたように,全体の傾向として本システムの実験期間後に評価が上昇している.これは,指差し呼称の評価がフィードバックされることで,各人がよりしっかりとした指差し呼称を行うようになったことを示していると思われる.アンケート結果と合わせた分析からは,他者から指導を受けたと感じている人,およびシステムの使用を意識している人の評価が上昇する傾向にあるという結果が得られたが,他者からの指導は,指導された側の技能の向上に益するとともに,指差し呼称実施への意識づけの強化に寄与することが評価の上昇に影響していると思われる.また,本システムの使用を意識している人の評価が上昇するという点についても,本システムが指差し呼称の訓練システムであることを事前に説明していることから,訓練に対する意識づけにつながっていると思われる.
図5に示すとおり利用者から見て本システムはおおむね有用なものとして受け止められたと思われるが,表4にあるように,システムの印象に関わる因子としては「システムの効果の高さ」「システムの使いやすさ」が有意であり,これは表3にある評価値の向上に関与する因子とは異なるものとなっている.これは,システムが利用者から良い評価を受けることと,システムが利用者にとって有用であることの違いを示唆しているのではないかと思われる.
一方で,図4に表れているように,実験期間後に評価が下降している人も存在する.これは,その人の最初の1回と最後の1回の評価のみで指差し呼称の評価の上昇と下降を判断しているため,各人の実施ごとの動作のぶれが,評価値のぶれとなり,このような評価の下降として現れた可能性がある.今回の試用実験では,本システムの使い方に特に制限を設けなかったが,より正確な評価を行いたい場合には1回の指差し呼称で評価するのではなく,複数回の指差し呼称の評価値を用いるべきと思われる.また,アンケートの自由記述欄では,数は少ないが,より詳細な指差し呼称の改善点を指摘してほしいという意見があった.これは,本システムのフィードバックが3段階の評価という大まかなものであることに起因すると思われる.
6. おわりに
今回,看護師業務内の指差し呼称による確認を訓練するためのシステムとして,検知した指差し呼称の評価を行い,その評価結果を即座に音声でフィードバックするシステムを提案し,開発を行った.
システムを病院の看護師に試用してもらった結果,システムによる指差し呼称の評価値が有意に上昇することが確認でき,指差し呼称の訓練に有効であることが示されている.試用実験後のアンケートからはシステムがおおむね有用なものとして受け入れられたという結果を得た.また,アンケート結果と本システムによる評価値と合わせた分析より,他者からの指導を受けることや,システムへの留意が,指差し呼称の評価値の上昇に影響を与えることが示された.これは,本システムを使用した訓練を実施する際のヒントとなると思われる.
今後の改善に関して,アンケートの自由記述欄にシステムの各機器への充電に関する不満の意見が存在した.本システムは,小型無線加速度角速度センサ,Android端末,PCが協調するものであるため,これらすべての充電が十分でないと正しく動作しない.今回構築したシステムでは,指差し呼称の検知・評価およびセンサデータ・音声データ記録のためにPCを用いているが,指差し呼称の検知・評価をAndroid端末で処理することで,今後システムに必要な機器の数を減らすことを考えている.
参考文献
- [1] 厚生労働省・中央労働災害防止協会:社会福祉施設における安全衛生対策マニュアル:腰痛対策とKY活動,〈https://www.mhlw.go.jp/new-info/kobetu/roudou/gyousei/anzen/0911-1.html〉, pp.108–110(参照2021-12-02).
- [2] 芳賀 繁:「指差呼称」のエラー防止効果の室内実験による検証,産業・組織心理学研究,Vol.9, pp.107–114 (1996).
- [3] 公益財団法人日本医療機能評価機構 医療事故防止事業部:医療事故情報収集等事業2020年年報,〈http://www.med-safe.jp/pdf/year_report_2020.pdf〉 (2021).
- [4] 公益財団法人日本医療機能評価機構,“集計表2020年1月–12月(2020年年報分)”, 〈https://www.med-safe.jp/contents/report/html/nennzi/2020/index.html〉(参照2022-09-10)
- [5] 川田綾子,宮腰由紀子,藤井宝恵,小林敏生,田村紫野,寺岡幸子:確認作業に「指差し呼称」法を用いた時の前頭葉局所血流変動の比較,日本職業・災害医学会会誌,Vol.59, No.1, pp.19–26 (2011).
- [6] 浦島 智,中村正樹,鳥山朋二,大島淳一,中川美都子,野村忠雄:看護師向け指さし呼称確認システムの試作,電子情報通信学会技術研究報告,信学技報,Vol.112, No.472, WIT2012-76, pp.181–186 (2013).
- [7] Urashima A., Nakamura M. and Toriyama T.: Preliminary Results of Pointing and Calling Detection System for Nurses, Proceedings of the 11th Asia Pacific Conference on Computer Human Interaction (APCHI2013), pp.192–194 (2013).
- [8] 浦島 智,鳥山朋二,中村正樹,中川美都子,大島淳一,吉野 修,野村忠雄:看護師向け指差し呼称検知システムの開発,電子情報通信学会論文誌D, Vol.J99-D, No.2, pp.224–231 (2015).
- [9] Grünerbl A., Pirkl G., Weal M., Gobbi M., and Lukowicz P.: Monitoring and enhancing nurse emergency training with wearable devices, In Adjunct Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2015 ACM International Symposium on Wearable Computers (UbiComp/ISWC'15 Adjunct). ACM, New York, NY, USA, pp.1261–1267. DOI: 〈https://doi.org/10.1145/2800835.2807941〉 (2015).
- [10] Huang Z., Nagata A., Kanai-Pak M., Maeda J., Kitajima Y., Nakamura M., Aida K., Kuwahara N., Ogata T. and Ota J.: Self-Help Training System for Nursing Students to Learn Patient Transfer Skills, IEEE Transactions on Learning Technologies, Vol.7, No.4, pp.319–332 (2015).
- [11] 岩崎正裕,藤波香織:学習データ量削減のための圧縮センシングを用いた時系列データ解析による指差し呼称時の腕振り動作認識,マルチメディア,分散協調とモバイルシンポジウム2013論文集,pp.668–674 (2013).
- [12] 濱田悠司,森 一之,上野洋平,後藤幸夫,亀井克之,吉本剛生:運転操作管理装置,特開2015–11086 (2015).
- [13] Chang C.-C. and Lin C.-J.: LIBSVM: a library for support vector machines, ACM Transactions on Intelligent Systems and Technology, Vol.2, pp.27: 1--27: 27 (2011). Software available at 〈http://www.csie.ntu.edu.tw/~cjlin/libsvm〉.
付録
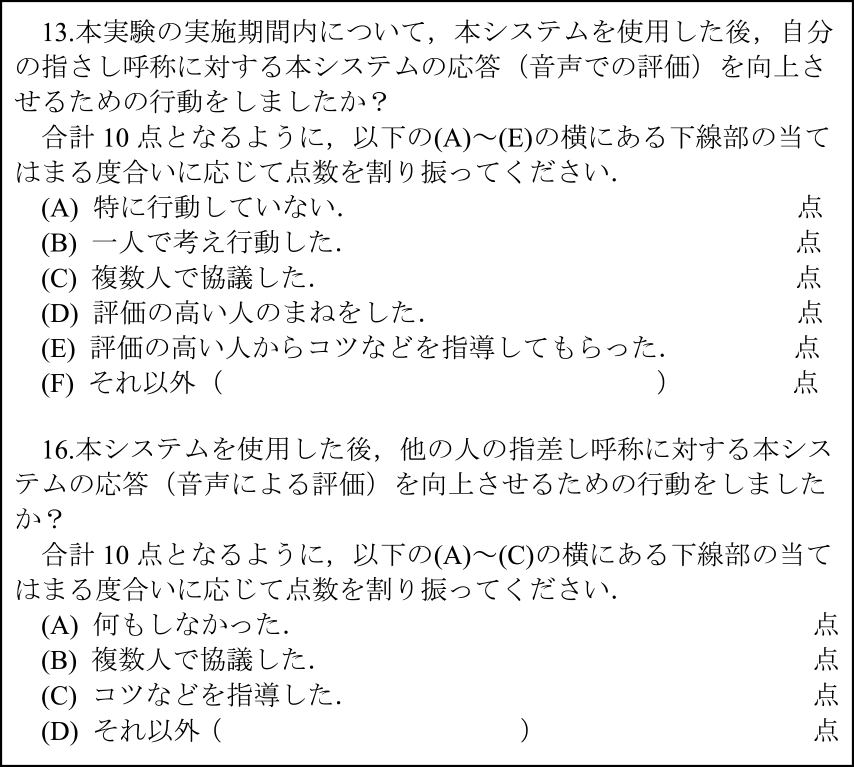
付録A.1 アンケート質問項目
アンケートは5段階のリッカート法による質問を22問と,選択肢に対し合計が10点となるように点数を振り分ける質問が2問,他の質問に対しその理由を選択肢より問う質問が2問,自由記述欄1問により構成されていた.
以下にリッカート法による質問項目を示す.
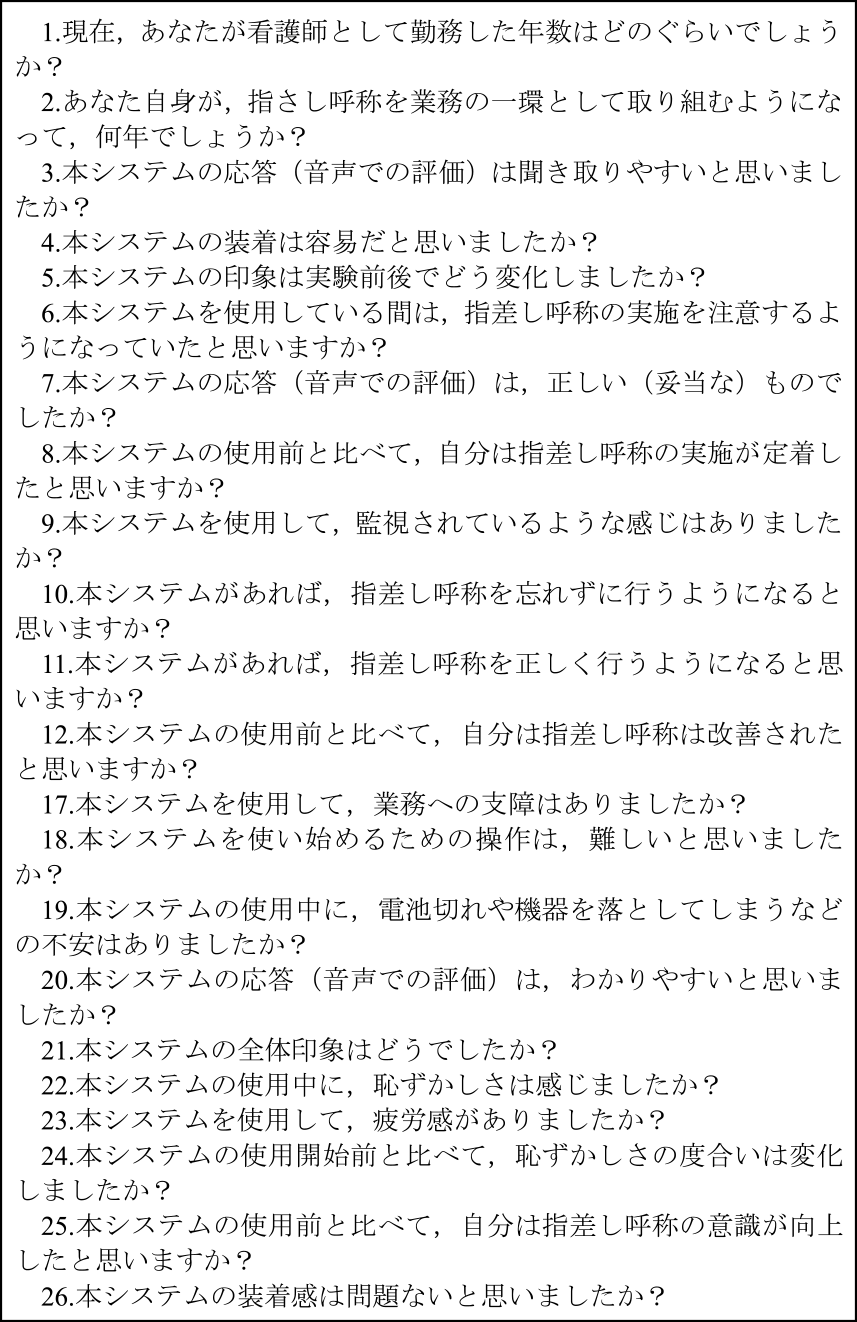
また,以下に点数記入の質問項目を示す.
付録A.2 因子分析のパターン行列


浦島 智(正会員)a-urasim@pu-toyama.ac.jp
1999年京都大学大学院工学研究科博士後期課程修了.博士(工学).同年富山県立大学電子情報工学科助手.2011年同大学講師.2023年同大学准教授.現在に至る.情報システムの応用に関する研究に従事.情報処理学会,電子情報通信学会,日本バーチャルリアリティ学会各会員.

鳥山 朋二(正会員)
1987年富山大学大学院工学研究科修士課程修了.同年NTT厚木電気通信研究所入所.以来,LSIの設計方式,ヒューマンインタフェースおよび画像処理に関する研究に従事.2005年富山県立大学大学院工学研究科社会人博士後期課程修了.2005年ATRに出向.2008年より富山県立大学教授.現在に至る.博士(工学).

中川 美都子(非会員)
1977年3月富山県立総合衛生学院 第一看護学科卒業.同年4月富山県立中央病院に入職,2012年4月から2019年3月まで富山県高志リハ病院,現富山県リハビリテーション病院・こども支援センターに勤務.

大島 淳一(非会員)
1982年名古屋工業大学機械工学科卒業.1987年豊橋技術科学大学大学院工学研究科エネルギー工学専攻修士課程修了.1997年九州工業大学工学研究科博士後期課程設計生産工学専攻修了.博士(工学).この間スズキ(株)勤務を経て,1990年富山県高志リハ病院入職.障害をもつ人への技術支援の研究に従事.バイオメカニズム学会,日本リハ工学協会の各会員.
採録日 2023年3月16日