LoRaにおける動的拡散率制御を用いた時分割多元接続方式
Time Division Multiple Access with Dynamic Spreading Factor Control in LoRa
1. 序論
IoTの利用が広まる中,図1に示すバスの現在位置をリアルタイムで表示するバスロケーションシステムのような交通機関における無線通信機器を用いた開発や研究が行われている[1].特に地方都市における公共交通機関は住民にとって必要不可欠であり,バスロケーションシステムの導入が進められている.しかし,バスロケーションシステムのデータ伝送に用いる無線通信技術において,モバイル通信規格のような高コストな通信は地方都市における運営に不向きである.これに対し,省電力で遠距離通信が可能なLow Power Wide Area(LPWA)を用いた低コスト化ネットワークの構築が行われてきた[2].
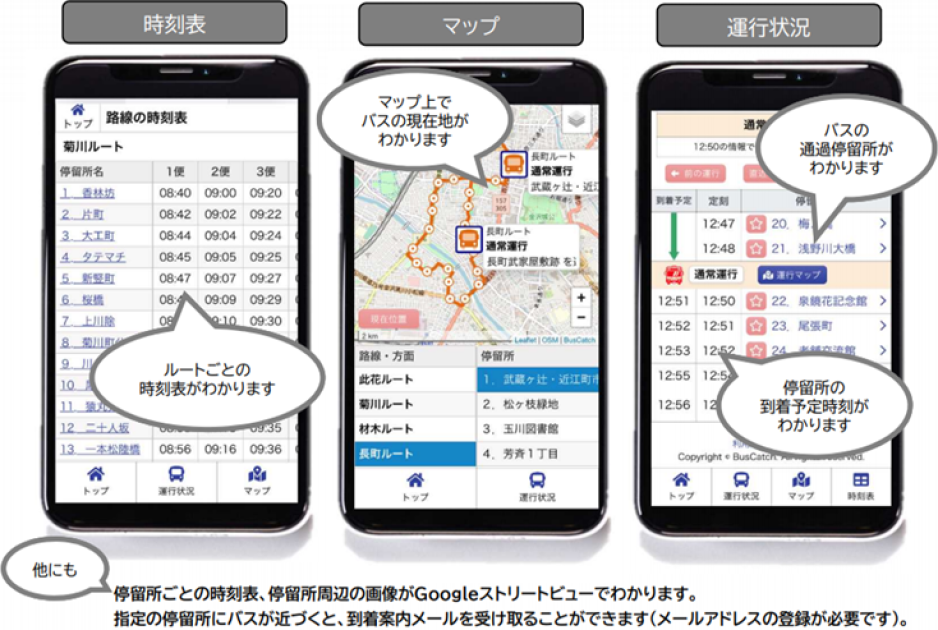
Fig. 1 Bus location system “FLAT BUS” at Kanazawa, Japan.
LPWAの中でも,LoRa通信は実用距離が数kmあり,プライベートLoRaのような通信費がかからない規格も存在する.しかし,LoRa通信ではMAC層にALOHA方式を用いていることから,複数のノードの通信時刻が重なると通信衝突が発生することがある.近年,IoTの進展に伴いデバイスが増加傾向にあるため,通信衝突が増加してしまう危険性が高い.
そこで,通信衝突を防ぐために「時分割多元接続方式による無線通信システム及び無線通信方法」が研究されてきた[3].無線通信システムに時分割多元接続方式(TDMA)を取り入れることで,各ノードの通信開始時刻を一定間隔で開けることで通信衝突をふせぐことが可能である.しかし,図2のようにLPWAはLTEやWi-Fiのような他の通信規格に比べ通信速度が遅いため,接続ノード数が増加するほど通信間隔が大きく開いてしまう.そのため,バスロケーションシステムのようなリアルタイム性が重視されるシステムには,適していない[4].
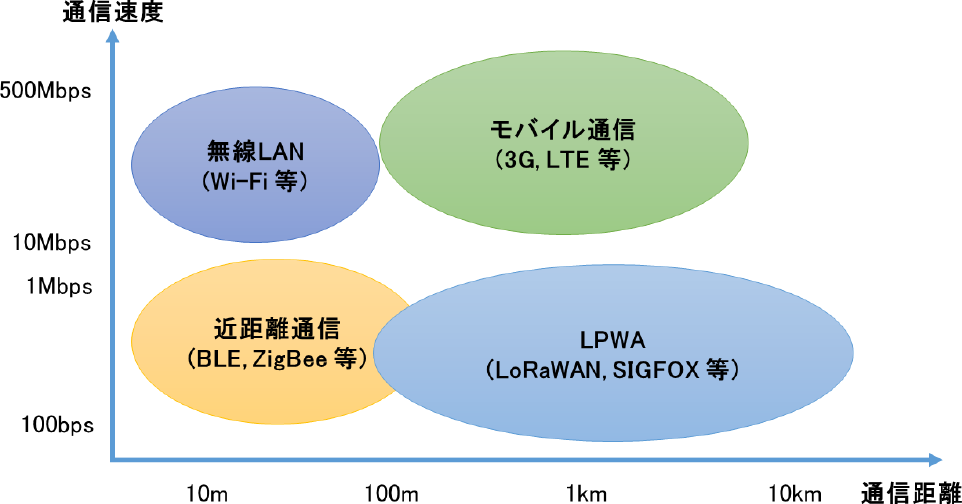
Fig. 2 Diagram of the relationship between Low Power Wide Area (LPWA) and other wireless communication systems.
本稿では,「時分割多元接続方式による無線通信システム及び無線通信方法」をベースに,伝送速度と信頼性のバランスを調整するLoRa拡散率の制御を用いて伝送遅延を考慮した多元接続の手法を提案し,検証を行った.
2. 時分割多元接続方式を用いたLoRa通信の既存研究
2.1 LoRaを用いた通信
Low Power Wide Area(LPWA)とは,低消費電力で遠距離通信を実現する通信方式である.LPWAは「ライセンス系」と「アンライセンス系」に分かれており,ライセンス系は通信時に無線局免許が必要なのに対しアンライセンス系は不要である.またLPWA中でもセルラー系LPWAのように,携帯キャリアが運営するセルラーネットワークを用いた規格がある.
LoRaは,アンライセンス系の非セルラー系LPWAであり,LoRaWANという標準規格とLoRaWANを用いないプライベートLoRaと呼ばれる通信方式に分けられる.LoRaWANはLoRa用に設計されたMedia Access Control(MAC)層におけるプロトコルで,Class A,Class B,Class Cの3つのクラスに分類され,効率的なアクティブ制御を行い,消費電力を抑える.
また,LoRAWANはLoRa専用のネットワークサーバを使用するため既設の媒体を使用できコストを抑えることができる.それに対し,プラベートLoRaは会社ごと独自のプロトコルを使用しており,自由度の高い設計が行える[5].
2.2 LoRaの通信特性
LoRaを用いた通信における伝送時間はLoRa MAC層のパラメータであるLoRa拡散率と帯域幅の選択に依存している.また,LoRa通信の信頼性はパケット伝送率であるPacket Delivery Ratio(PDR)で測定することができる.PDRは受信側のノイズ比率を表すSignal-to-Noise Ratio(SNR)と受信レベルを表すReceived Signal Strength(RSS)に依存している.
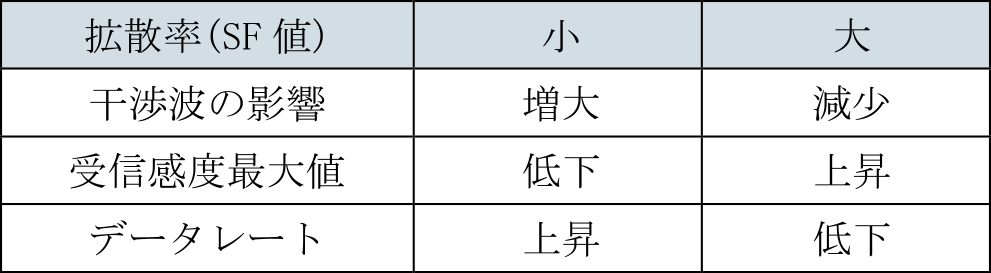
表1に拡散率Spreading Factor(SF)の値における通信特性の変化を示す.SF値はスペクトラム拡散方式の無線通信において送信データ速度であるbit rateに対する拡散符号速度であるchip rateの比を表す.SF値を大きくすることで電波の受信可能な感度を大きくすることができる.そのため干渉波の影響が抑えられ低いRSSでパケットを受信できるがデータレートを低下させる.つまり,SF値を選択することでLoRa通信におけるデータレートと通信範囲を決定することができる[6].
Table 1 Relation between communication characteristics and spreading factor.
2.3 時分割多元接続方式を用いた通信
図3にALOHA方式と時分割多元接続方式における通信のチャートを示す.LoRa通信で多く採用されているALOHA方式では各ノードが任意の時刻にデータを送信するため,通信衝突が発生し送受信に失敗することがある.特にデータの送信頻度やノード数の増加によって発生率もともに増加してしまう.
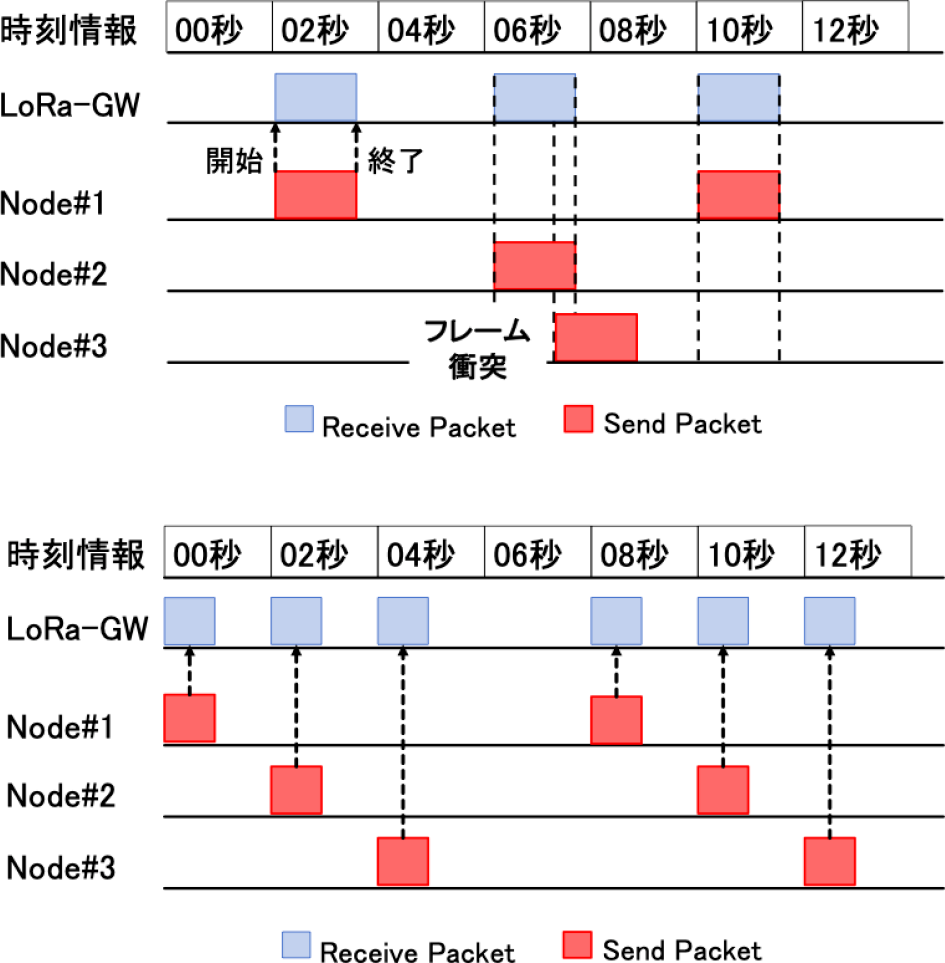
Fig. 3 Communication flowchart of ALOHA and TDMA.
通信衝突の発生を防ぐために「時分割多元接続方式による無線通信システム及び無線通信方法」が研究されてきた[3].図4に既存システムの概要図を示す.既存の研究では衛星測位システムからの時刻情報をデバイスのデータ送信タイミングに転用している.その時刻情報をもとにデバイスごとスケジューリングされたタイミングでデータの送信を行い,通信衝突の発生を防いでいる.
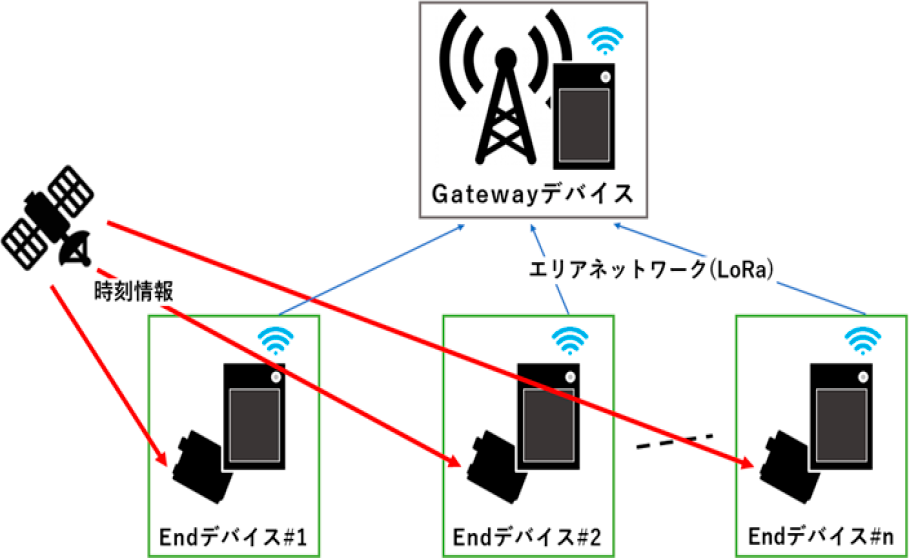
Fig. 4 Schematic diagram of the multiple access with the satellite system.
3. 時分割多元接続方式を用いたLoRa通信における課題
図5に2.3で述べた既存システムにおける通信タイミングチャートを示す.既存システムでは通信速度が遅いLoRa通信の場合,通信するノード数が増えるほど1ノードにおける通信間隔が大きく開いてしまう.そのため,リアルタイム性が求められるアプリケーションには適していない.
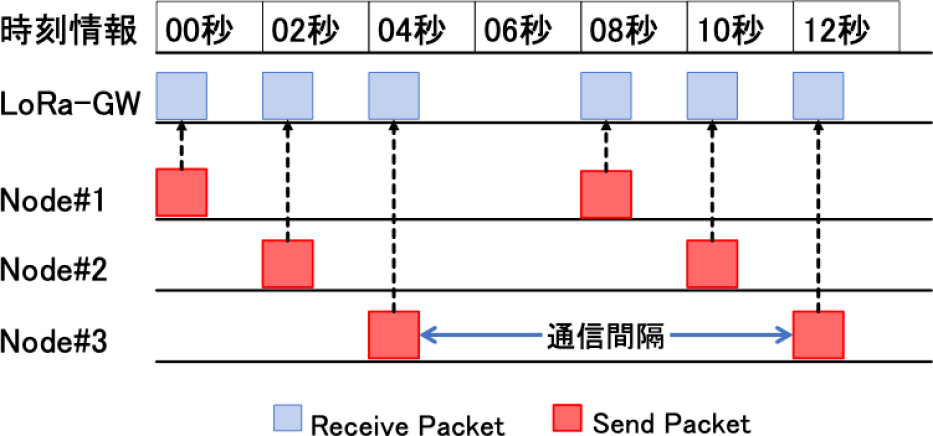
Fig. 5 Communication flowchart in TDMA.
図6にバスロケーションシステムの研究開発[2]におけるLoRaを用いた送受信とバス停の位置関係を示す.バスロケーションシステムのような移動体における通信では,RSSがリアルタイムで変化する.既存のシステムでは,各ノードから事前に設定されたスケジュールとパラメータで一方的に送信される.そのため,常にそのシステムで必要な通信の信頼性を保つための最大SF値を設定する必要がある.つまり,リアルタイム性と通信の信頼性のバランスが欠如する可能性がある.
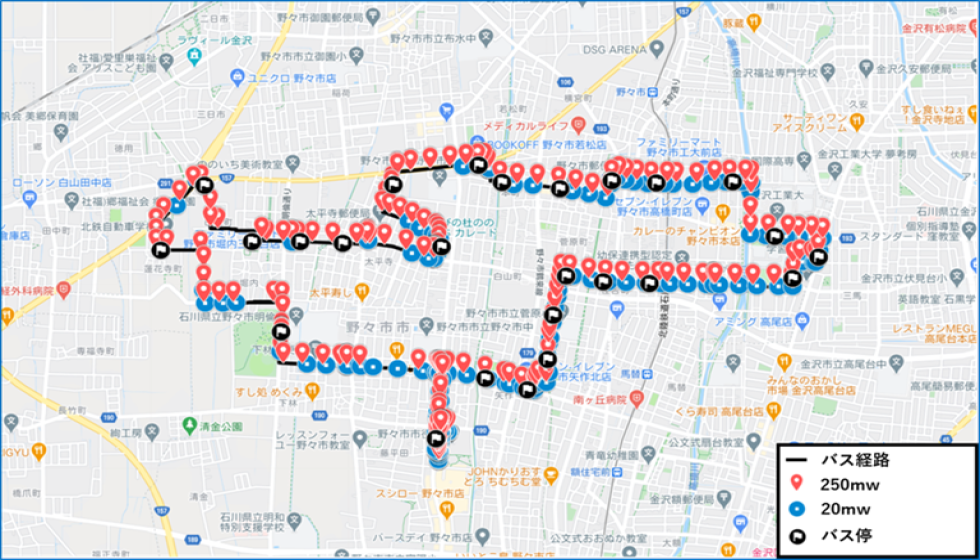
Fig. 6 Experiment result of bus location system with LoRa and the location of bus stops.
また,図7のように第三者による妨害や通信障害が発生した場合,一方的に送信し続けるEndデバイスは通信環境を把握する術がないため,不安定な通信を続ける可能性がある.
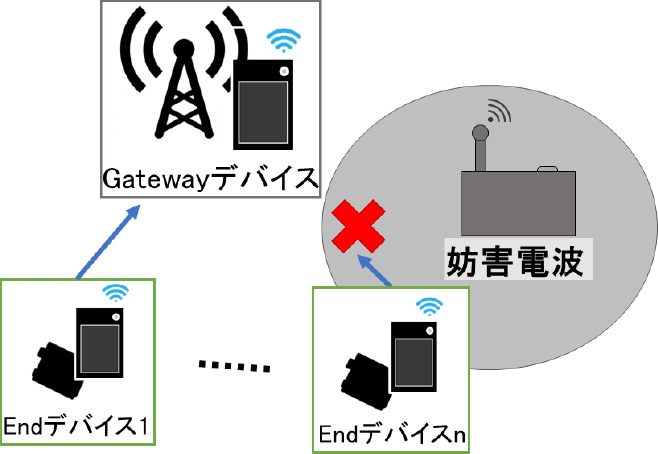
Fig. 7 Interference or communication problems caused by outsiders in wireless communications.
4. LoRa拡散率における動的制御の提案
4.1 LoRa拡散率の動的制御を用いたシステムの提案
前章で記述した課題を解決するため,Gatewayデバイスにおいて通信環境をモニタリングしリアルタイムでEndデバイスの通信パラメータである拡散率を制御することでシステムのリアルタイム性と通信の信頼性を両立させるシステムの開発を考案した.本章では提案システムにおけるLoRa拡散率の動的制御の方法を提案する.
4.2 LoRa拡散率制御による遅延短縮
図8に本稿で使用するLoRaモジュール「RM-92A」の帯域幅125 KHz・ペイロード10 byte時における各拡散率(SF値)での最大受信感度と転送時間の相関図を示す.横軸は通信の受信感度(RSSI)の最大値,縦軸は転送にかかる時間である.
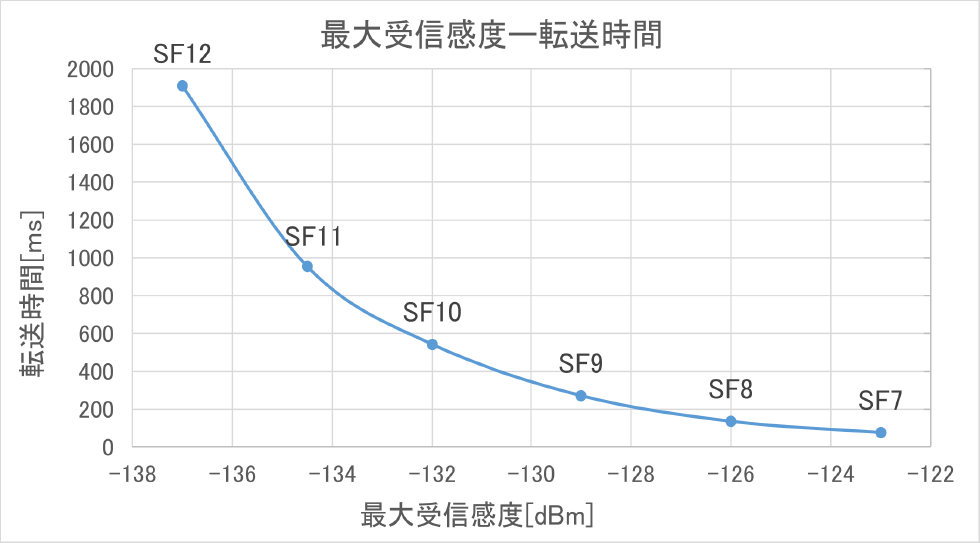
Fig. 8 Maximum receiving sensitivity and transmission time at each spreading factor with RM-92A LoRa module.
各SF値における最大受信感度と転送時間は負の相関関係にあり,SF値を増加すると最大受信感度が上昇し転送時間を拡大させ,SF値を減少すると最大受信感度が低下し転送時間を縮小させる.また,各SF値の最大受信感度と転送時間は指数関数的な関係であるため,LoRa拡散率は,SF値8から7への変更時より12から11への変更時のほうが転送時間をより縮小させる[7].
以上のデータより,LoRa拡散率を通信環境に適応するよう制御することで,通信の信頼性の向上と転送時間の縮小のバランスを図ることができる.
4.3 LoRa拡散率の動的制御
4.3.1 LoRaモジュールの動的制御
図9にLoRaモジュールの動的制御の方法を図で示す.4.1で述べたように,通信の信頼性と転送時間のバランスを維持するためには,LoRaモジュールの拡散率を通信環境に適応させる必要がある.しかし,移動体における通信システムでは常に通信環境が変化するため,LoRaモジュールを動的に制御しLoRa拡散率などのパラメータを設定させることが望ましい.
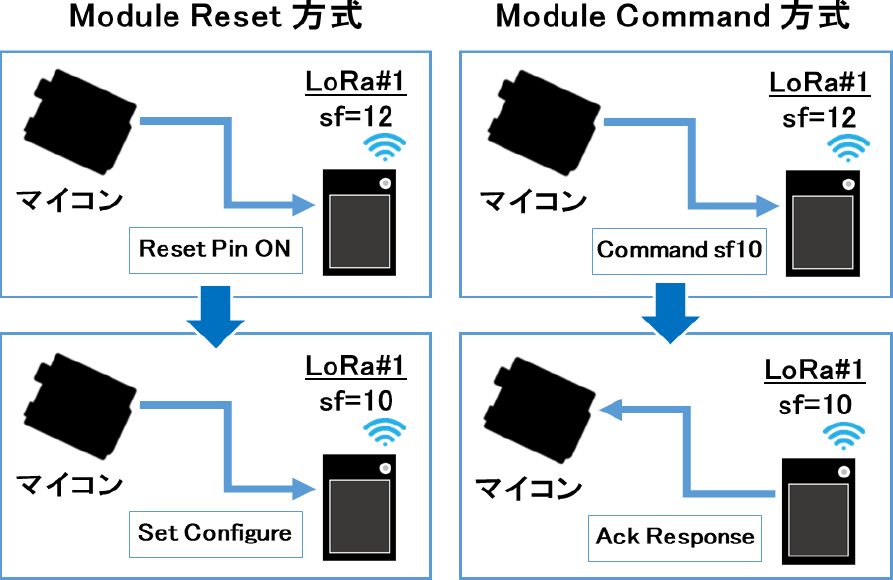
Fig. 9 LoRa Module Reset method and LoRa Module Command method.
LoRa拡散率の動的制御に,マイコンを用いた2種類のLoRaモジュールの動的制御方法が考えられる.図9左側のModule Reset方式では,マイコンに接続したLoRaモジュールのリセットピンを用いることでLoRaモジュールの再起動と設定の変更を行っている.図9右側のModule Command方式では,モジュール特有のコマンドを用いることでLoRaパラメータの設定を変更している.
Module Reset方式は多くの通信モジュールで用いることができるが,モジュールの起動と設定に時間を要する.それに対し,Module Command方式は該当する機能を持ち合わせた通信モジュールが必要になるが,拡散率設定のみを行うため比較的時間がかからない.
本システムではリアルタイム性を重視し拡散率を短時間で変更できるModule Command方式を採用しており,RF-LINK社のLoRaモジュールにおけるAT-Command Modeを用いた.
4.3.2 受信レベルによる通信の評価
表2に本システム内におけるLoRa拡散率の動的制御に用いる受信感度の閾値を示す.通信における受信感度を示すRSSIは値が低くなるにつれ,デバイス間の障害物や距離によって通信環境が悪化していると言える.
Table 2 RSSI threshold and time slot allocation for each SF value in the system.
本システムでは,搭載したLoRaモジュールから通信時の受信側よりRSSIを取得し,通信状況をリアルタイムで評価している.評価値より通信に適応した拡散率(SF値)を設定し,通信の信頼性と転送時間を最適化している.
表2では,SF値を決定する際に用いるRSSIの閾値を示している.4.1より,各SF値における最大受信感度と転送時間は指数関数的に負の相関関係があることから,移動体における通信環境の変化に適応した閾値を設定した.転送時間が大きく短縮されるSF=12からSF=11は閾値を細かく設けることで転送時間の縮小の影響をもたらし,転送時間の変化が少ないSF=10からSF=7は閾値の間隔を大きく開けることで,最大受信感度にゆとりをもたらしている.
以上の点から,本システムでは通信状況を4段階に分け通信の評価を行い,SF値を設定している.
4.3.3 拡散率制御によるタイムフレームの設定
図10にLoRa拡散率の動的制御による可変送信時間を用いた際の通信チャート図を示す.本システムではGatewayによる同期通信から全Endデバイスの通信終了までを1周期とし,時分割多元接続方式における各Endデバイスからのデータ転送に必要な時間を,拡散率(SF値)に基づいて算出された付与時間として各Endデバイスへ割り当てる.
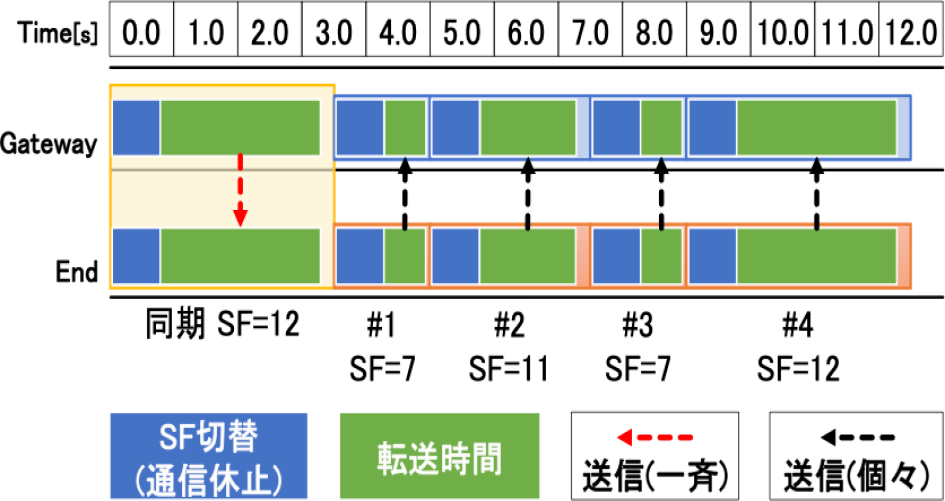
Fig. 10 Communication chart diagram for dynamic spreading factor control.
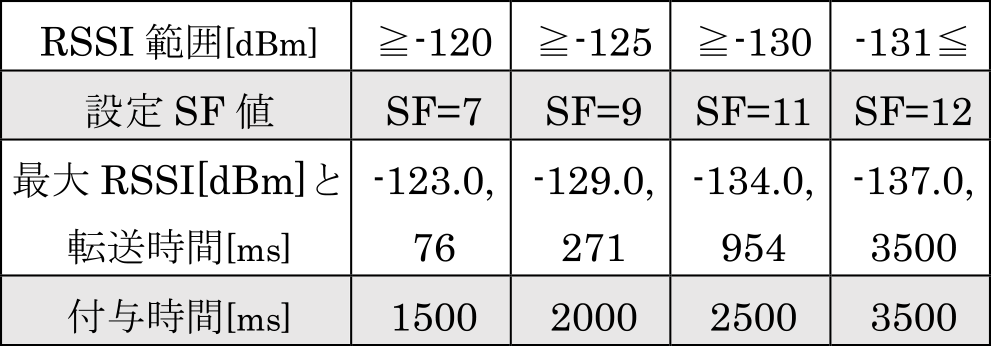
表3に本システムのSF値と付与時間の関係を示す.付与時間の算出は4.2.2で設定したSF値における転送時間,SF設定の切り替えにかかる時間をもとに行っている.SF値の切り替え時間は4.3.1で記述したModule Command方式におけるコマンドとLoRa Moduleからのレスポンスにかかる時間であり,本システムでは約750ミリ秒で行われる.
Table 3 Relation between the spreading factor and time slot assignment.
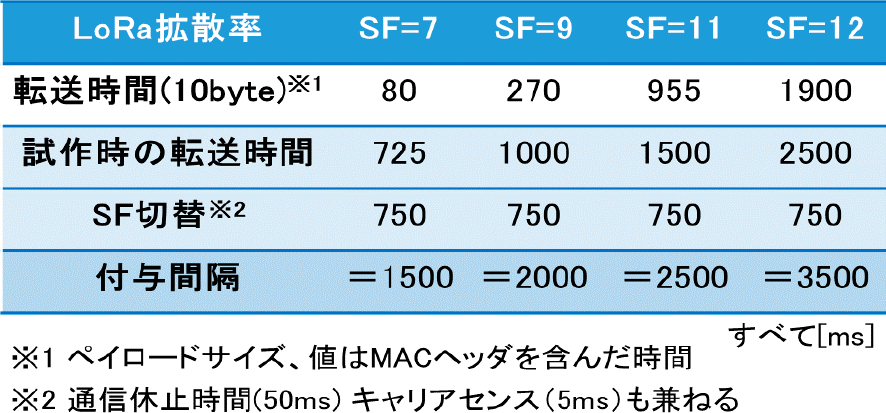
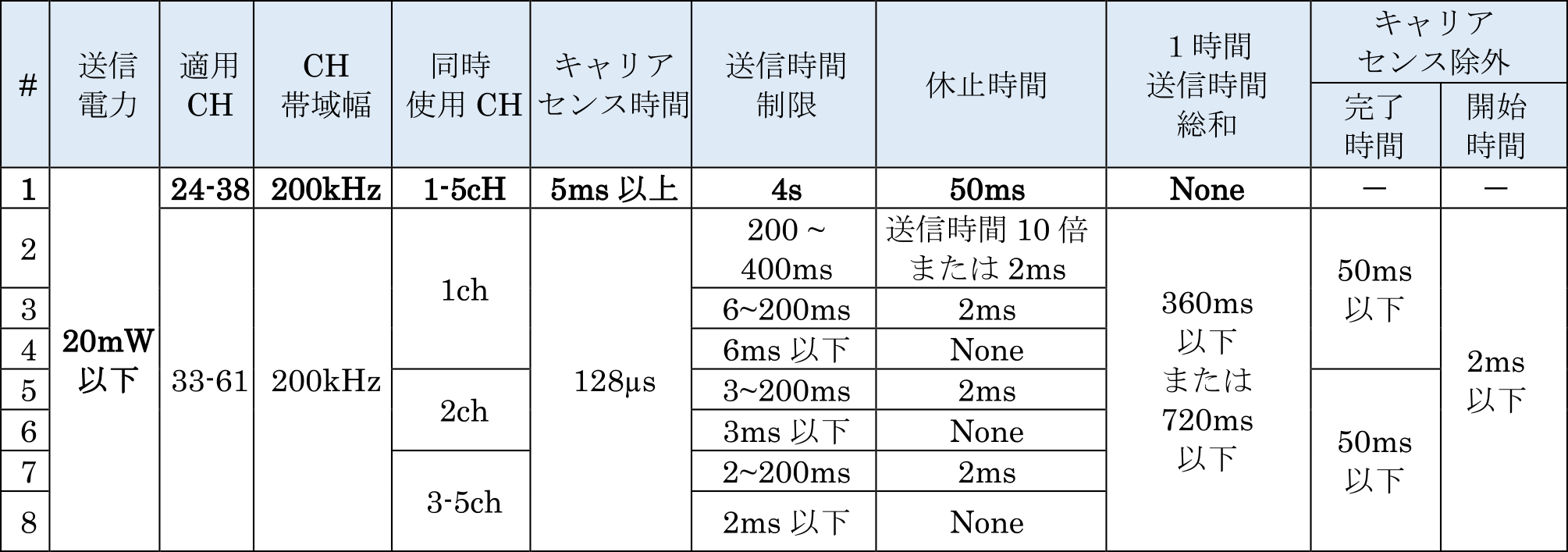
表4にARIBの920 MHz帯における標準規格で決められているパラメータの組み合わせを示す.表4では本稿で使用する20 mW出力におけるパラメータの組み合わせを抜粋している.本稿では1時間あたりの送信総和時間の制限を除外するためにキャリアセンス時間を5 ms以上・休止時間を50 ms設けている.また,1回あたりの送信時間制限を4 sに設定し通信を行っている.その他のパラメータ制限を表4で示す.
Table 4 ARIB standard in the 920 MHz band.
本システムでは各Endデバイスは毎周期Gatewayとパラメータの同期を行い,同期時刻と付与時間を基に通信タイミングをスケジューリングする.
同期とスケジューリングを繰り返し行うことで,衛星システムからの時刻情報を用いることなく時分割多元接続方式を用いることができる.
5. LoRa拡散率動的制御を用いた時分割多元接続の実現
5.1 システム概要
図11にシステム概要図を示す.本システムでは,4章で述べたLoRaパラメータの動的制御を用いた時分割多元接続による通信を行っている.通信は,1台のGatewayデバイスを親機とし複数台のEndデバイスを子機と設定し行っている.
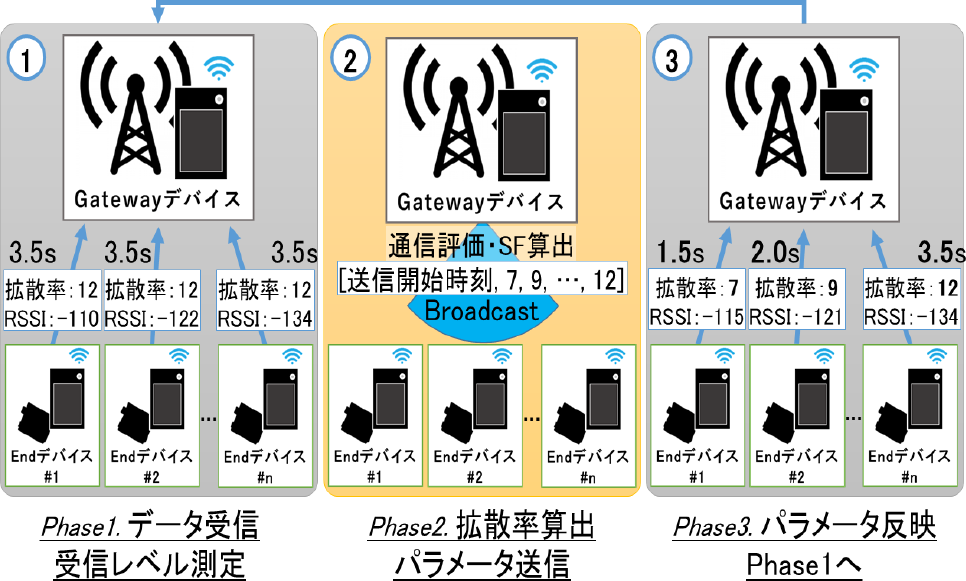
Fig. 11 Overview of the proposed system.
5.1.1 受信感度の測定と拡散率の算出
Gatewayデバイスは各Endデバイスからデータを受信する際に受信感度(RSSI)を測定する.測定したRSSIを基に通信評価を行い,最適な拡散率(SF値)を算出する.(図11中①)
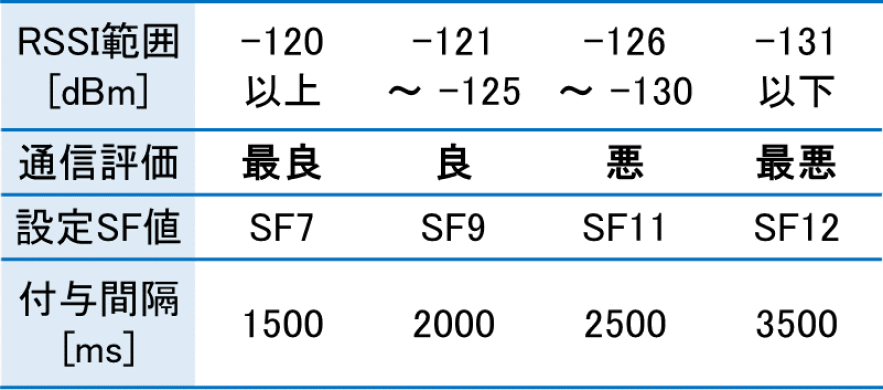
通信評価を表5に示す.通信評価はRRSIを基準に4段階で行われる.
Table 5 Communication evaluation based on RSSI.
5.1.2 パラメータの同期
各デバイスのSF値の算出を終えたGatewayデバイスはブロードキャスト通信を行い,全Endデバイスとパラメータの同期を行う.(図11中②)
5.1.3 パラメータの設定と送信
パラメータデータを受け取ったEndデバイスは自機の通信設定を行い,全デバイスの付与間隔を参考に送信タイミングの制御を行う.(図11中③)
5.2 ハードウェア構成
図12にGatewayデバイス(左側)とEndデバイス(右側)のハードウェア構成図を示す.
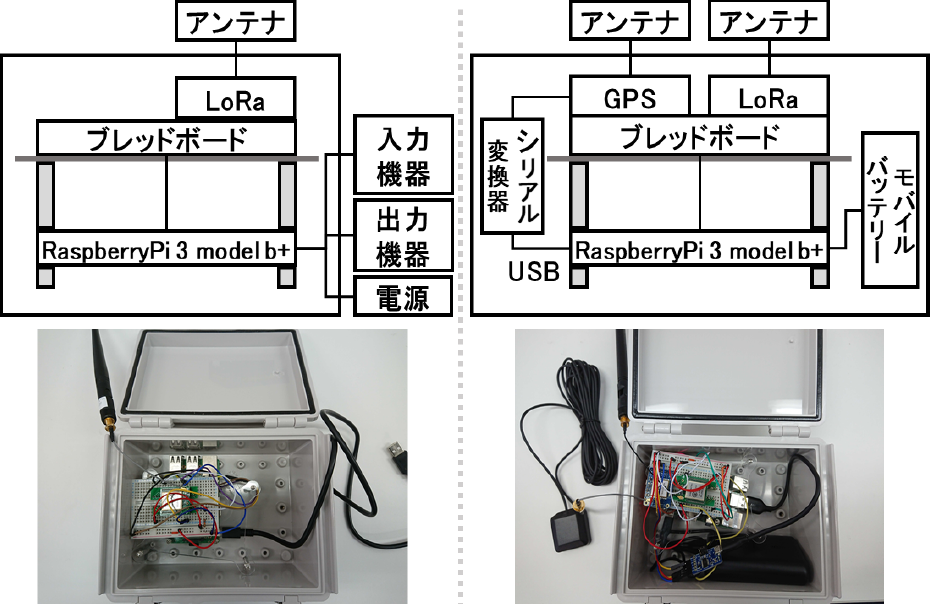
Fig. 12 Hardware configuration of gateway device (left) and end device (right).
図12(左)のGatewayデバイスではマイコンピュータであるRaspberry Pi 3 model b+を用いてRF-LINK社のLoRaモジュール「RM-92A」をシリアル通信で制御している.RM-92Aは外部にアンテナ線を用いてアンテナを取り付けている.防水ボックス内では仕切板を用いてブレッドボードとマイコンピュータの2層構造となっている.また,Raspberry Piは外部から電源と入出力機器を接続しており,システムの操作を行っている.Gatewayデバイスは屋内での使用を想定し,Raspberry PiはWi-Fi接続を行い収集データの保存や時刻情報の取得を行っている.
図12(右)のEndデバイスではGatewayデバイスと同様のマイコンピュータを使用し,シリアル変換器を用いて同時にLoRaモジュールとGPSモジュールをシリアル通信で制御している.また,Endデバイスは防水ボックス内で2層構造のデバイスとモバイルバッテリーが接続されているため,ボックス単体で動作することができる.
5.3 ソフトウェア構成
図13に本システム全体の構成図を示す.本システムではLoRaパラメータの動的制御を行うためRM-92A LoRaモジュールのAT-Command modeを使用している.
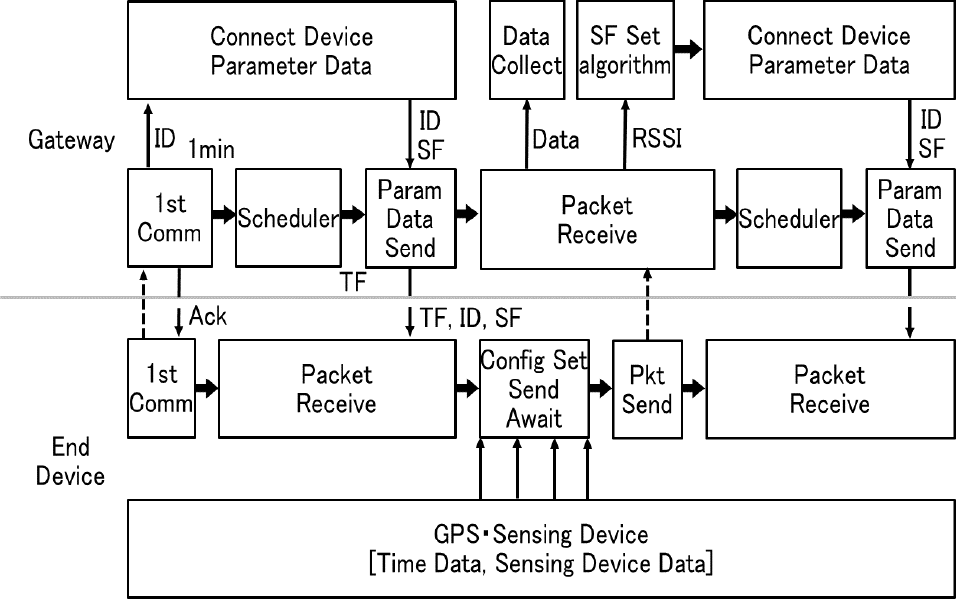
Fig. 13 Software configuration diagram.
また,図14にGatewayデバイスのソフトウェア構成図を示す.Gatewayデバイスでは以下の機能を備えており,Pythonプログラムを用いて図14のシステムを構成している.
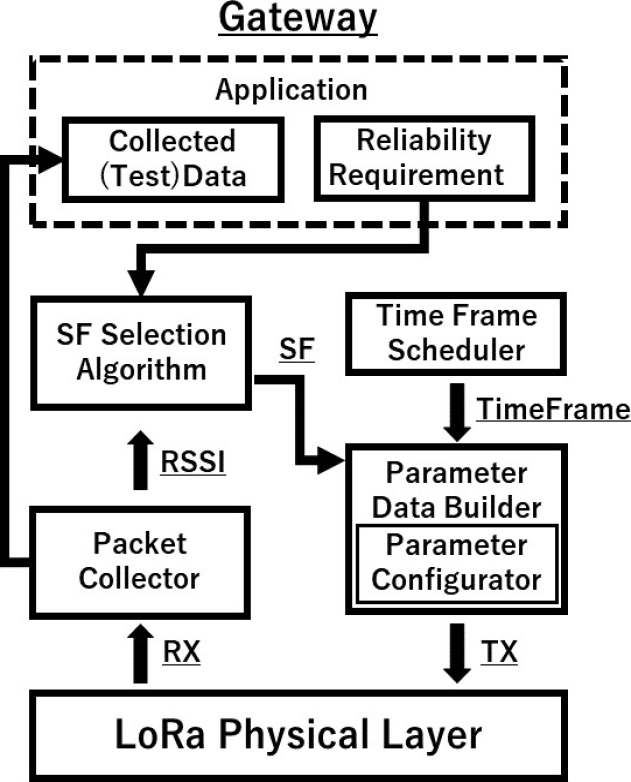
Fig. 14 Gateway software configuration diagram.
- ・Packet Collector
LoRaモジュールからシリアル通信を用いて受信パケットを読み込む. - ・SF Selection Algorithm
受信パケットからRSSIを取得し,デバイス間のLoRa拡散率(SF値)を設定する. - ・Collected Data・Reliability Requirement
受信パケットから収集したセンサデータを取得・保存する.パラメータやタイムフレームの設定に必要な閾値や設定値を保存しておく. - ・Time Frame Scheduler
送信開始時刻の設定と各デバイス間のSF値より受信間隔のスケジュールを行う. - ・Parameter Data Builder
「送信開始時刻・使用CH・各デバイスのSF値」含むパラメータデータを生成し,Endデバイスへの送信パケットを生成する.
図15にEndデバイスのソフトウェア構成図を示す.Endデバイスでは以下の機能を備えており,Pythonプログラムを用いて図15のシステムを構成している.
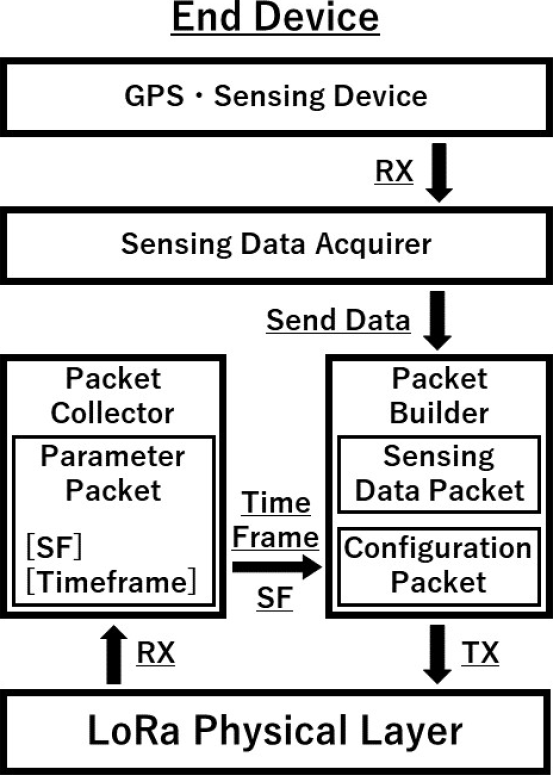
Fig. 15 End device software configuration diagram.
- ・Packet Collector
Gatewayデバイスからブロードキャスト送信で送られてきたパケットを受信する.受信パケットからパラメータデータを取得し,タイムフレームの計算と自機で使用するCHとSF値の参照を行う. - ・Sensing Data Acquire
GPSなどのセンシングデバイスからセンサデータを取得する.可能な場合は時刻情報を取得し,送信タイミングに転用する. - ・Packet Builder
取得したセンサデータを送信パケットに格納する.参照したCHとSF値をもとにLoRaパラメータの設定を行う.タイムフレームに従い,スケジューリングされたタイミングで送信を行う.
6. 提案方式の評価
6.1 評価方法
6.1.1 移動体通信における動的LoRa拡散率制御の評価方法
図16に本システムを用いた移動体通信における評価方法の考案図を示す.評価方法を考案するために,同LoRaモジュールを用いて測定・予想を行った.金沢工業大学やつかほリサーチキャンパス内での簡易測定の結果は図16の左図のようになっている.これらの通信環境を参考に移動体のルート(右図)を決定し,通信を行う.

Fig. 16 Evaluation methods for the proposed systems in mobile communications.
通信実験では,転送時間が最短の拡散率(SF)SF=7,中間のSF=9,受信可能感度が最大のSF=12,本システムを用いて10分間計測する.本システムにおけるSF値は通信状態に合わせて動的に変更される.
評価方法はSF=7,9,12を用いた通信と本システムを用いた通信時におけるパケット受診率と単位時間あたりの送信回数を比較し,本システムにおける通信の信頼性とリアルタイム性を検証する.
6.1.2 時分割多元接続を用いた通信における動的拡散率制御の評価方法
図17に本システムにおける時分割多元接続通信の評価方法の考案図を示す.6.1.1と同様に簡易測定を行い,システム内で使用する通信環境の基準にあった通信場所を選定した.Gatewayデバイス1台対し,番号1~4の場所に設置したEndデバイス4台の時分割多元接続を用いた同時通信を行う.

Fig. 17 Evaluation method for proposed systems in time division multiple access communication.
通信は,SF=12,9,7を用いた場合と本システムを用いた場合で行う.本システムにおける各EndデバイスのSF値はデバイスごとの通信環境にあわせて動的に変更される.
評価方法はSF=7,9,12を用いた通信と本システムでの通信時における各デバイスのパケット受診率と単位時間あたりの送信回数を比較し,本システムにおける通信の信頼性とリアルタイム性を検証する.
6.2 評価結果
6.2.1 移動体通信における評価結果
表6に6.1.1で述べた移動体通信における本システムの評価結果を示す.表6における拡散率の行は実験に用いた拡散率を示し,既存策として拡散率(SF値)7,9,12を用いて通信実験を行い,Autoでは本システムの動的拡散率制御を用いて通信実験を行った.
Table 6 Evaluation results in mobile communication.

パケット受信率の行はGatewayデバイスにおいて10分間でEndデバイスからLoRa通信を用いて送られたデータの受信率[%]を示す.パケット送信回数の行は,Endデバイスにおいて10分間でデータを送信した回数[回]を示す.
3.1で述べたように,拡散率の値が低いSF=7から高いSF=12に変更するとともにパケット受信率が上がるのに対し,パケットの総送信回数が減っていることが分かる.Auto列は,パケット受信率97.5%・パケット送信回数120回であり,SF=12は,パケット受信率98.8%パケット送信回数172回であった.よって提案方式は,SF=12と比較し十分なパケット受信率を保っている.しかし,Auto列における送信回数は既存の通信方法に対し減少していることが分かる.
6.2.2 時分割多元接続を用いた通信における評価結果
表7に6.1.2で述べた時分割多元接続方式による複数デバイスを用いた通信における本システムの評価結果を示す.既存のLoRa拡散率を固定した通信方法も同様に実験を行い比較した.
Table 7 Evaluation results of communication experiments with time division multiple access.
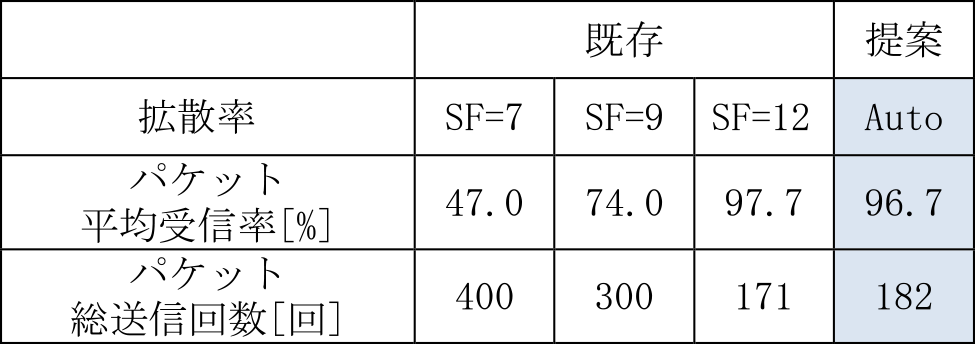
表7における拡散率の行は実験に用いた全デバイスの拡散率を示し,既存策として拡散率7,9,12を用いて通信実験を行い,Autoでは本システムの動的拡散率制御を用いて通信実験を行った.
パケット平均受信率の行はGatewayデバイスにおいて10分間で全EndデバイスからLoRa通信を用いて送られたデータの受信率の平均[%]を示す.パケット総送信回数の行は,各Endデバイスにおいて10分間でデータを送信した回数の総和[回]を示す.
6.2.1と同様に拡散率の値が低いSF=7から高いSF=12に変更するとともにパケット受信率が上がるのに対し,パケットの総送信回数が減っていることが分かる.Auto列は,パケット受信率96.7%・パケット送信回数182回であり,SF=12は,パケット受信率97.7%パケット送信回数171回であった.提案方式は,各デバイスが通信状況に適した動的拡散率制御を行っているため,SF=12に近い十分なパケット受信率を保ちつつSF=12よりパケットの総送信回数を増加させている.
7. 考察
7.1 提案方式におけるリアルタイム性に関する考察
6.2.2の通信結果から,一定数のEndデバイスにおける通信環境が良好な場合,LoRaにおける動的拡散率制御を既存の時分割多元接続方式に用いることで,十分な通信の信頼性を保ちつつリアルタイム性を保持したデータ収集することができることが分かる.
一方,6.2.1の通信結果から,本システムにおいてデバイス数が少ない場合,パラメータの同期に用いる通信の分,1サイクルにおけるデータ送受信にかかる時間が増大するためリアルタイム性がかけてしまうことが分かる.
また,6章で述べた実験において,通信を制御する既存システムでは各拡散率の転送時間や通信間隔の時間を固定された値で設けている.したがって,全デバイスのデータ送受信に要する時間に変動が少ない.提案したシステムでは使用する拡散率が動的に変動するため,全デバイスのデータ送受信に要する時間も変動する.したがって,多くのデバイスにて低受信強度が続くような環境では拡散率が常に大きな値となり,全デバイスのデータ送受信に要する時間が増大してしまうため提案システムは適さないといえる.
7.2 提案方式における時刻同期方法に関する考察
本システムでは全Endデバイスに同タイミングでパラメータデータが送信されている.そのため,パラメータデータの受信タイミングを時分割多元接続方式に必要な親局と子局の時刻同期に転用できる.したがって,既存の「時分割多元接続方式による無線通信システム及び無線通信方法」のように衛星測位システムからの時刻情報を用いることなく通信のスケジューリングを行うことができるため,GPS信号ができない環境やGPSモジュールの不要によるコスト削減・消費電力の抑制が期待できる.
8. 今後の課題
LoRa拡散率の動的制御を用いることで,単体の移動体における場合と複数の固定デバイスによる検証を行い通信の信頼性の確保とリアルタイム性の両立が可能なことが確認できた.また,前章で記述した点から,本システムは複数の移動通信体があり,かつ通信環境が変動するようなアプリケーションにおいて有効と考えられる.本システムの有効性をバスロケーションシステム等の実環境での検証が今後の課題といえる.
9. 結論
本稿では,LoRa拡散率の動的制御を用いることで,時分割多元接続方式による無線通信において低速度なLoRa通信を用いた場合に,通信の信頼性とリアルタイム性を向上させることを提案した.
既存の時分割多元接続方式による無線通信では,通信ノード数の増加とともに1ノードにおける通信間隔の拡大によるシステムのリアルタイム性の欠如が課題であった.提案したシステムでは,既存の時分割多元接続方式を用いた無線通信システムをベースに,各デバイスとの通信状況を評価し適切なLoRa拡散率に動的変更を行っている.
また,提案したシステムを移動体通信と複数デバイスにおける時分割多元接続方式を用いた通信に搭載し検証を行った.結果,限定されたデバイス数や環境においては既存の通信システムと比較し高いパケット受信率を維持しながら通信回数を増加させることに成功し,通信の信頼性を維持したままリアルタイム性の向上を達成した.
LoRaの拡散率を動的制御することで,通信環境が変動する移動体通信において有効と考えられ,特にエンドデバイスが多数の移動体通信での効果が期待できる.
参考文献
- [1] 金沢市:金沢ふらっとバス:〈https://www4.city.kanazawa.lg.jp/11310/taisaku/flatbus/〉(参照2020-08-01).
- [2] Sakauchi R., Ishikawa S., Yabe H., and Sode Tanaka M.: “Multi-channel Communication of LoRa using Time Division Multiple Access”, IWIN2021 (2021).
- [3] 学校法人金沢工業大学.向井宏明,平櫻瞭太郎:時分割多元接続方式による無線通信システム及び無線通信方法,特開2020-178156. 2020/10/29.
- [4] NTT西日本: IoT事業拡大のためのLoRaWANの事業化,〈https://journal.ntt.co.jp/article/5426〉(参照2020-08-01).
- [5] EASEL Inc: LoRaWANとプライベートLoRaの違い,〈https://easel5.com/technical-guide/difference-lorawan-and-private-lora/〉(参照2020-08-01).
- [6] Mu D., Chen Y., Shi J., and Sha M.: “Runtime Control of LoRa Spreading Factor for Campus Shuttle Monitoring”, 2020 IEEE 28th International Conference on Network Protocols (ICNP) (2020).
- [7] (株)RFLINK: RM-92A/RM-92C製品仕様書:〈http://www.rflink.co.jp/pdf/RM-92A-92C/Ver209-RM-92A_RM-92C_data-sheets.pdf〉(参照2021-05-01).
- [8] 920MHz-BAND TELEMETER TELECONTROL AND DATA TRANSMISSION RADIO EQUIPMENT, ARIB STD-T108 Version 1.4.

石川 柊斗(非会員)b1816880@planet.kanazawa-it.ac.jp
2018年4月より金沢工業大学工学部情報工学科.LPWA関連の研究に従事.

向井 宏明(正会員)mukai.hiroaki@neptune.kanazawa-it.ac.jp
千葉大学工学部電子工学科卒業.同大学大学院工学研究科電子工学専攻修士課程修了.同大学大学院工学研究科人工システム科学専攻博士後期課程修了.三菱電機(株)入社,通信システム開発センター,情報技術総合研究所,通信システムエンジニアリングセンターを経て,2017年金沢工業大学工学部情報工学科教授就任.
採録日 2023年2月16日