認知症高齢者向け赤ちゃん型対話ロボット
―介護施設での長期導入の実現―
Interactive Baby Robot for the Elderly with Dementia
-Realization of Long-term Implementation in Nursing Home -
1. はじめに
平成29年度高齢社会白書(内閣府)によると,平成24年(2012)の日本国内の認知症高齢者は462万人で,65歳以上の高齢者の7人に1人の割合であったが,2025年には5人に1人の割合となり675万人に達するという推計が示されている.認知症は,モノ忘れのように有病者本人の日常生活に影響する問題だけではなく,BPSD(Behavioral and Psychological Symptoms of Dementia:認知症高齢者の暴言や暴行,徘徊といった問題行動,妄想や意欲低減といった心理的な症状)が,家族や周辺の社会にも大きな影響を与える.介護を担う介護者は常に認知症高齢者を注意深く見守る必要があり,その負担は大きい.さらに社会全体としても経済的な負担増加をもたらす.このようにBPSDへの対応は,認知症に関連する大きな社会課題の1つである[1], [2].
BPSD対応において,投薬治療は副作用の懸念もあることから,初期段階では投薬を伴わない非薬理学的な療法が推奨されている[3].音楽療法や行動療法は非薬理学療法として活用されておりその効果も明らかになってきているが[4],近年では動物型ロボットや対話ロボットなどコミュニケーションロボットを用いたロボットセラピーの取り組みも始まっており,その効果の科学的な検証が行われている[5].
我々は,動物型ロボットでも対話ロボットでもない第3のロボットとして,赤ちゃん型対話ロボットに着目し,それとの関わりを通して認知症高齢者へ安らぎを提供することで,BPSDの軽減と介護者の負担軽減を目指した.外観を赤ちゃんに模した根拠は,認知症高齢者と赤ちゃんには実は高い親和性がある点に基づく.たとえば,Cohen-Mansfield et al.による25種類の刺激に対する認知症高齢者の反応を調査した研究では,赤ちゃんや赤ちゃんを模した人形のほうが,動物型ロボットより,高齢者が受け入れ,注意を払い,積極的に関わることが報告されている[6].また,James et al.の研究[7]においても,認知症高齢者はくまのぬいぐるみよりも赤ちゃん人形を好むことが報告されており,外見は動物よりも赤ちゃんのほうが好まれると言える.
また,赤ちゃんとの情動的な関わりは,認知症高齢者に残される機能を考慮しても効果的である.認知症高齢者に限らず,人は年を重ねると様々な認知機能が低下していく.しかし,情動を司る大脳辺縁系の機能は比較的維持されており,快・不快などの情動記憶は残りやすいため,介護の際には感情に働きかけることが重要であると言われている[8].赤ちゃんの泣き声や笑い声はそれを聞いた人が直感的に理解できる強力な情動表現であり,認知症高齢者にとって記憶されやすく愛着を持ちやすいと考える.一方で動物,特に見慣れない動物では,その鳴き声が意味する情動表現を理解することはしばしば困難であり,記憶に残りにくい可能性がある.
このような認知症高齢者と赤ちゃんの親和性から,認知症高齢者に対する非薬理学療法の1つには赤ちゃんを模した人形を利用する人形療法があり,赤ちゃんに可能な限り似せた外観で造形された人形を認知症高齢者に渡して世話をしてもらうことでBPSD軽減につながることが示唆されている[9].赤ちゃんの世話をするというのは,具体的には話かけたり,あやしたり,服を着替えさせたりといったことになるが,他者との関わりを持たせることで認知症高齢者の問題行動を減少させることができる.一方で,人形療法で用いられる人形は可動部や発話機能がないため,赤ちゃんとの関わりのうち,認知症高齢者からの一方的な働きかけしか再現できないという問題があった.
この問題点を解決するために,我々は発話機能を持つ赤ちゃん型対話ロボットを作ることを考えた.ロボットからも認知症高齢者に働きかけたり,認知症高齢者からの働きに対してロボットが反応したりすることで,認知症高齢者からの関わりを促進し,BPSDの軽減と介護者の負担軽減につながることを期待するからである.これまでも高齢者向けの赤ちゃん型対話ロボットはいくつか開発例がある(例えば[10]).しかし,これらのロボットにおいては表情や声,動作など機能は様々であり,実際にどういった機能が最低限必要なのかについては不明であり,施設が求める費用対効果の高いロボットを実現できていない.また,赤ちゃん型対話ロボットについても,認知症高齢者や施設で働く介護職員への受容性調査もほとんど行われていない.一方で,コミュニケーションロボットが実際に施設で継続的に利用されるためには,認知症高齢者とロボット間の関係構築だけでなく,介護職員とロボット間の関係構築も重要であることが動物型ロボットや対話ロボットで報告されている[11].しかし,赤ちゃん型対話ロボットに対する認知症高齢者と介護職員の関係については調査されておらず,実際に調べるためには,介護施設の中で日常的に運用してみることが必要である.
以上の問題意識から,我々はこれまで認知症高齢者と関わりあう赤ちゃん型対話ロボットとして必要最低限の機能を持ったロボット「HIRO」を開発した[12].HIROには顔のデザインを施しておらず,可動部分もない.これらコストのかかる機能を削った代わりに,実際の人の赤ちゃんの音声を録音し再生することで,インタラクティブ性を実現し,人の赤ちゃんらしさを感じられるようにした.顔が無いので,第一印象では少し不気味な印象のあるロボットだが,意外なことにこれまでの介護施設での実証実験から,認知症高齢者はHIROに積極的に関わること,さらに顔の有無が,認知高齢者の関わり方に有意な差を与えないことを確認している[13].しかし,これまでの研究では認知症高齢者にロボットを5分間利用してもらうという一度だけの短期的な実験であったため,何度も利用するような長期運用での受容性については確認ができていない.さらに,赤ちゃん型対話ロボットを長期的に運用した際のロボットと認知症高齢者あるいは介護職員との関係性の変化に関しても調査を行っていなかった.そこで,本研究では,HIROを元に開発した「かまって『ひろちゃん』」(ヴイストン株式会社が開発を担当.以降ではひろちゃんと呼ぶ)(図1)を実際の介護施設に導入し,介護職員のみで2週間運用してもらった.確認された効果や関係構築のための課題を整理し,課題を踏まえてシステムを改良した.その後,改良を加えたシステムを約1ヶ月運用実験し,ロボットと認知症高齢者あるいは介護職員との関係を改善することができたことを示す.これらの実験の結果に基づいて,赤ちゃん型対話ロボットの介護施設への導入効果を,認知症高齢者,介護職員,介護施設それぞれの視点から議論する.

Fig. 1 Kamatte “Hiro-chan”.
2. 赤ちゃん型対話ロボット「ひろちゃん」
2.1 設計思想
本研究では,赤ちゃんのミニマルデザインとして開発された「HIRO」を元に開発したひろちゃんを用いた(図1).HIROやひろちゃんの最大の特徴は,顔のデザインを施していない点にある.これは人のミニマルデザインとして開発された遠隔操作型アンドロイド「テレノイド」の研究に基づいている[14].テレノイドには表情変化の機能はなく無表情であった.しかし,認知症高齢者はテレノイドから発せられる操作者の声に含まれる感情状態などから,「笑っている」「喜んでいる」と自由な発想で表情を想像し,テレノイドに対して積極的に関わることができた.我々は人間の持つ非常に豊かな想像力への期待も含めて,HIROやひろちゃんには顔にデザインを施さず,赤ちゃんと認識できるが性別や個性は見た目からは認識できないようにした.このように顔をデザインしないことで,見たものの想像力を引き出すように作られた人形は世界的にもいくつか存在する.たとえば,シュタイナー教育で用いられる「ウォルドルフ人形」は子どもの想像力や創造力を育むために意図的に単純に作られており,顔は何もない,あるいは非常に単純な目口のみである.また,日本でも岐阜県飛騨地方で昔から作られる「さるぼぼ」にも顔がない.その理由には諸説があるが,見る人の感情を写しだすことができるようにあえて描かれてないという説もある.
顔をあらかじめデザインしないもう1つの利点は,顔自体のザインを利用者に委ねることができる点である.HIROを用いた研究において11名の認知症高齢者のほとんどが顔がないことについて気にしなかった一方で,顔について指摘した認知症高齢者が2名いたことも事実である[13].2名とも顔がないことでHIROとの関わりを拒絶することはなかったが,そういった高齢者には自分が好きな顔をデザインしてもらうことで,さらにロボットに対する愛着を強めることができた可能性がある.
顔をなくした代わりに,声はテレノイドと同じく実際の人間の声,ここでは人の赤ちゃんの声を用いることで,感情など声から得られる情報を認知症高齢者が直感的に想像できるようにした.つまり,ロボットから認知症高齢者への働きかけは音声のみである.その音声による働きかけも,後述するように健常者にとってはすぐに飽きてしまうような単純な制御方法を採用した.これは,認知症高齢者の場合,記憶障害により,ロボットからの反応の詳細は覚えられないため,飽きずに関わり続けてくれるのではないかと期待したからである.
身体表現についても,通常,人形療法で用いられる赤ちゃん人形では写実的な表現を追求するのに対して,抽象的な表現を用いている.これもテレノイドの身体表現は抽象化されていたにもかかわらず,認知症高齢者は気にせずに積極的に関わることができたためである.それにより,図1のように顔がないことを除けば,普段の日常生活の中でもよくよく見かける小さな赤ちゃん型のぬいぐるみとして開発が可能となった.
このようにミニマルデザインに基づいたロボットの開発を行ったのには,開発の初期段階で介護現場より,「5分でいいので,入居者が気持ちを落ち着けてくれる時間を作ってもらえたら,我々の業務負担が大いに軽減されるので,高級な難しい機械ではなく,さっと渡せるようなもので何とかできませんか」という要望を受けたこともきっかけになっている.これに加え,BPSD症状のある認知症高齢者では,ロボットを落とすだけでなく,投げるといった暴力行為を行う可能性がある.こういった状況においても壊れにくく,万が一壊れたとしても安価であるため,介護職員にとって扱う際の心理的負担が少ないものが望ましいと考える.そのため,投げつけられても壊れず,人が怪我をしない,介護職員も安心して別の業務を行える安価なロボットシステムの実現を目指した.このためにも,不要な機能を削ぎ落とし,シンプルで頑健なシステム開発が可能なミニマルデザインのアプローチが有効であると考えた.
また,ミニマルデザインを採用することで顔表現の排除や抽象的な身体表現の採用によって構造や仕組みを極限までシンプルにすることには,今後広く普及させるための製造コストを下げられるため,施設に容易に複数導入することができるという利点もあるほか,実際の介護現場での運用を考慮した際に簡単に使えてさらに耐久性が高いこともメリットとなる.実際,研究の途上で発生したコロナ禍において,1つのロボットを多人数で利用することができなくなった際にも,各自に1体での運用が可能であった.このようにミニマルデザインのアプローチは実用化のためにも効果的である.
2.2 仕様
ひろちゃんは幅230×奥行170×高さ320 mmであり,重量約460 gと非常に軽量である.外装はポリエステル生地製のぬいぐるみで.体内にはスピーカと,外界との関わりを検出するための3軸加速度センサを搭載した制御装置が組み込まれている.左手に電源スイッチがあり,押すと電源が入り,3秒ほど長押しすることで電源がオフとなる.我々のこれまでの研究[12]において,少なくとも5分間は目を離しても認知症高齢者と関わり続けてほしいという介護職員からの要望があったため,5分で電源が自動的に切れる仕様になっている.また,右手には音量調整ボタンが入っており,5段階で音量を調整できるようになっている.外観のフォルムは赤ちゃんが座位している状態を想起する形状ながら,目,鼻,口など,顔の特徴はデザインされていない.一方で,赤ちゃんらしさの感情表現には実際の1歳乳児の声を録音し,100種類以上の声のパターンの笑い声,泣き声などを収集した.これらの録音音声を,それから伝わるポジティブあるいはネガティブな感情に基づき,5種類(ネガティブ,弱ネガティブ,ノーマル,弱ポジティブ,ポジティブ)のカテゴリに分類した.そして,ひろちゃんの感情状態に応じて5種類のカテゴリから1つを選び,音声ファイルを再生するようにした.なお,ノーマルの音声には“ma ma ma”など,喃語と呼ばれる音声をいくつか含んでいる.
ひろちゃんの発声は基本的にはHIRO [12]と同様に単純な方法で,感情状態に基づいて制御される.図2にその概要を示す.ひろちゃんには関わり推定器と内部状態生成器が備わっている.関わり推定器は内蔵されている加速度センサのセンサ値によって人がひろちゃんに関わっているかを推定し,ある閾値以上ならば,関わりがあったと判定し,そうでなければ,関わりがなかったと判定する.内部状態生成器は,関わり推定器からの判定結果と前の感情状態から,よりポジティブ(よりネガティブ)な状態へ遷移した感情状態を最終的な状態として出力する.具体的には,利用者が積極的に関わると,内蔵されている加速度センサの値にある閾値以上の変化が生じるため,その変化が継続的であれば感情がポジティブ方向に変化していく.一方,関わりがなければセンサ値に変化が出なくなるため,一定の時間経過とともにネガティブ方向に変化する.決定された感情状態に応じて,5種類の感情カテゴリの1つが選択され,選択された感情に属する音声ファイルが再生される.たとえば,感情状態がポジティブならば,ポジティブのカテゴリに含まれる音声ファイルから1つがランダムに選ばれ発声される.このような発声機能は過去にも玩具として販売されている類似製品にも備わっている一般的な方法であると考える.そのため,本研究で得られる知見は,ひろちゃんに限らず一般的な赤ちゃん型対話ロボットを介護施設へ導入し,長期運用した際に,赤ちゃん型対話ロボットが認知症高齢者,介護職員と関係を構築するための課題とそれを解決するための工夫について示唆を与えると考えられる.
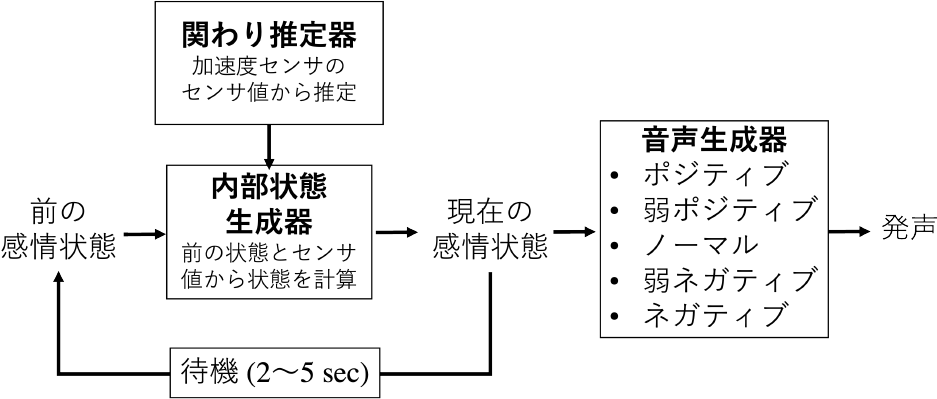
Fig. 2 Overview of vocalization control system.
3. 実験1:赤ちゃん型対話ロボット導入実験
実際にひろちゃんを特別養護老人ホームに導入し,介護職員のみの環境,つまり外部の人間は施設に不在の環境の下で運用してもらった.これにより,通常の介護業務の中で自然にひろちゃんを運用した際の,入居者である認知症高齢者や介護職員のひろちゃんに対する印象を調査した.
3.1 被験者
実験は特別養護老人ホームの同じ階に入居している入居者9名(女性8名,男性1名)を対象に行われた.被験者の年齢は70~97歳,平均年齢は84.9歳であり,BPSDを測定する検査であるNPI-NH [15]は4~42点,平均15点(満点は120点で高いほどBPSDの症状が重症であることを示す),会話を通した認知症検査である日常会話式認知機能評価(CANDy)[16]は0~21点,平均9.67点(満点が30点であり,6点以上の場合に認知症の疑いありと判断する)であった.認知症の方の3分の2は女性であることはよく知られており[17],今回実験を実施した介護施設における男性の割合は17%だった.本研究はATRの倫理委員会からの承認を得て行われた.
3.2 実験手順
実験は8名の介護職員により,介護業務の合間に約2週間にわたって行われた.新型コロナ感染防止のため,ひろちゃんを被験者の数だけ用意し,各被験者にそれぞれ専用のひろちゃんを割り当てる形で実験を行った.
実験前,施設の介護職員全員にひろちゃんの使い方や入居者への渡し方について,遠隔対話システムを用いて教示した.これは,できるだけ介護職員間でのひろちゃんの扱い方に違いが出ないようにするためである.介護職員には職員間でひろちゃんの扱い方について練習してもらう,実験に参加しない他の入居者や短期の施設利用者に利用してもらうなど,ひろちゃんの扱いについて熟知してもらった.また,各被験者専用のひろちゃんについては顔をつける,服を着せ替えるなど,各被験者が望めば好きなようにデザインしていいように教示している.
実験中,ひろちゃんは次のように運用された.まず,介護職員が各被験者のその日のスケジュールを確認し,食事の配膳や入浴といった自分たちの介護業務を踏まえながら,手が空いている介護職員が,被験者の空いている時間にひろちゃんを持って行き,ひろちゃんをあやすように声かけを行った.具体的には,被験者が個室あるいは共有スペースで活動していないことを確認後,スタッフがひろちゃんを赤ちゃんのように抱きつつ,あやしながら持っていき,「赤ちゃんが遊びに来たから,あやしてみない?」といった声かけをし,被験者にひろちゃんをあやすことを促し,その際の被験者の反応を観察した.その際,介護職員は観察された反応について具体的な内容を事前に用意した記録用紙に簡単に記述した.
また,介護職員にはひろちゃんを運用する中で生じた問題や,各被験者に対してひろちゃんの推奨される使い方や改善点,追加で希望する機能などの感じたことについても記録してもらった.
これらの観察記録に加え,2週間の実験後,10回以上被験者とひろちゃんの関わりを観察した介護職員4名には,インタビューを行い,ひろちゃんと被験者との関わりについてより詳細な印象を収集した.
3.3 分析
得られた観察記録の記述内容から被験者の反応を評価した.被験者がひろちゃんを受け入れ,抱きしめるや話しかける,笑いかけるなど積極的に関わった場合をポジティブ,「いらない」と発言したり,投げたりといったひろちゃんを拒絶する反応を示し,関わりを持たなかった場合をネガティブ,枕元に置いたままにするや,食事など他のことに集中するなど,ひろちゃんの声に反応せずどちらか判断しづらい場合をニュートラルとし,実験中のそれぞれの反応の量を調べた.さらに初回と最終回の反応から被験者の態度の変化を調査した.
また,介護職員から得られた改善点などの記録やインタビューについても特徴的な点を分類し,ひろちゃんを長期的に運用するための改善点や影響について調査した.
3.4 結果
3.4.1 赤ちゃん型対話ロボットに対する被験者の反応
実験中,業務の忙しさや,被験者の状態などによりひろちゃんを利用しない日もあった.また,9名の内2名,被験者BとFが入院などでそれぞれ実験9日目,6日目に退所した.その2名も含め,最終的には被験者にひろちゃんを6~12日間利用してもらうことができた.平均は8.6日であった.1日の導入回数は1~4回であり,被験者は実験中平均13.6回ひろちゃんと直接関わった.被験者1人に対して,2~6名の介護者が観察を行った.
図3に各被験者が示した反応の割合を示す.縦軸はそれぞれの被験者のIDを示している.全体を通して,最も多くポジティブな反応を示した被験者は5名,ネガティブな反応を示した被験者は3名,ニュートラルな反応を示した被験者は1名であった.
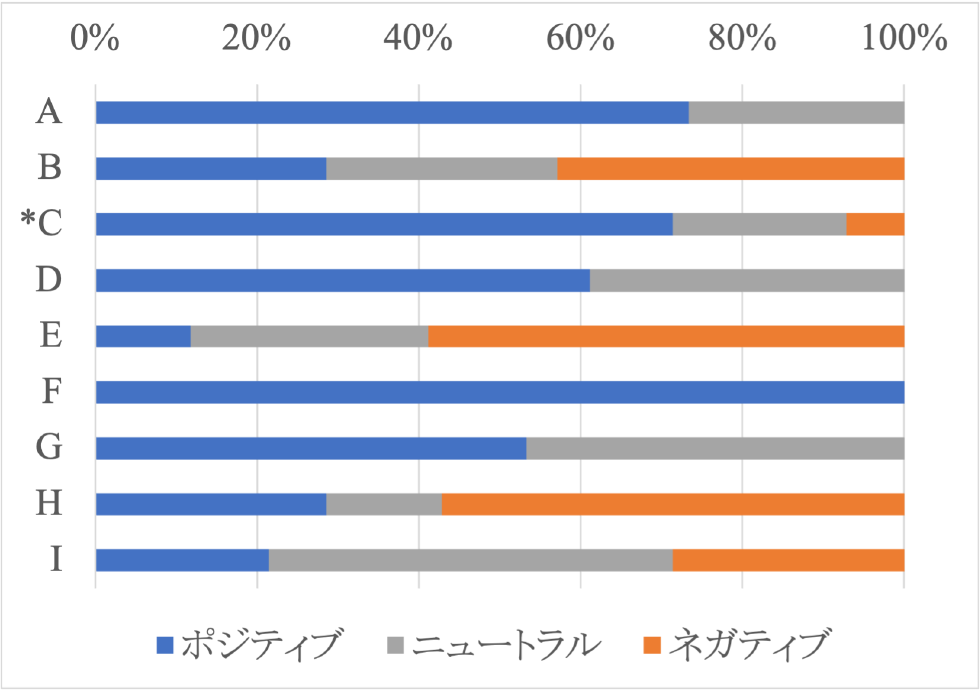
Fig. 3 Percentage of attitude shown by each subject toward Hiro-chan (Alphabets on the vertical axis indicate the ID of each subject, and the symbol * indicates male).
被験者のひろちゃんに対する反応は,やりとりを繰り返すことで変化しているようである.図4にひろちゃんと初めて対峙したときと最後に対峙したときに被験者が示した反応の割合を示す.初回では全ての被験者がひろちゃんに対して抱きしめるや話しかけるといったポジティブな反応を示したが,最終回では,ひろちゃんに対するポジティブな反応を示したのは全体の約3割であり,ポジティブな反応を示す被験者が減少した.
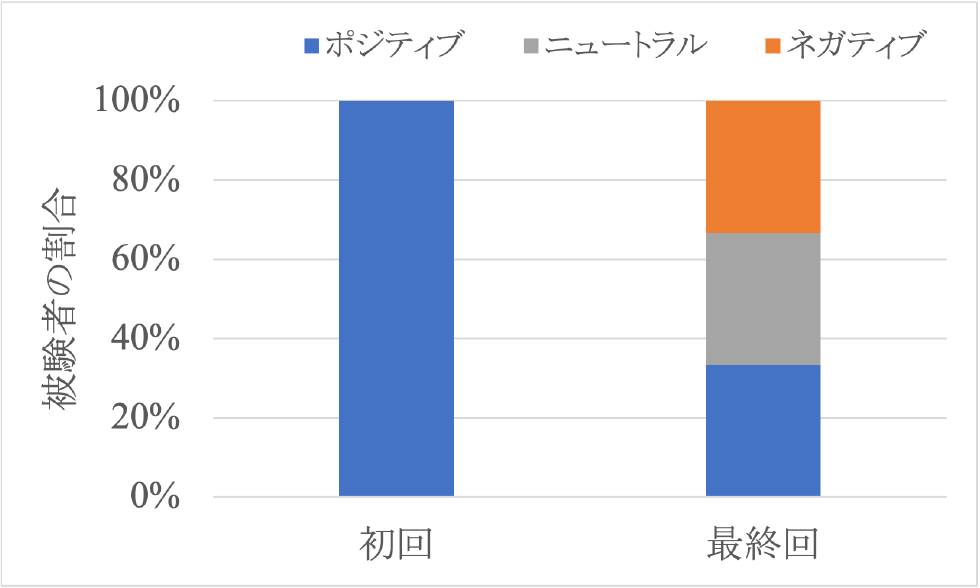
Fig. 4 Percentage of attitudes shown by subjects at the first and last trials during the introduction of Hiro-chan.
3.4.2 介護職員からの意見
実験中,介護職員から15個の意見が寄せられた.それらの中にロボットの運用に関する大きな課題はなく,インタビューを通しても特に指摘はなかったため,実験中,問題なくロボットを利用することができたと言える.
得られた意見を「システム全体」,「外装」,「音声」,「その他の機能」,「導入方法」の5つに分類した.システム全体については,「息子しかいない被験者が娘のようにかわいがり,『息子しか生んでないのですごく嬉しい』と述べていた」といったロボットに対する被験者の感想や,「抱き枕として使用されていた」といった使用方法,「何度も落とされても壊れなかった」といったロボットの頑強さについての意見であった.
外装に関しては,顔についての意見として,「顔のパーツをつけると非常に喜んだ」や「表情がある方が興味を持ったのではないか」など顔情報の必要性についての意見があった.その一方で,被験者が「笑っているの?」「困っているの?」など,本来ない顔を想像していたという報告もあり,従来研究[18]で示されたようにどちらが良いというわけでもなさそうである.また,髪の毛がないことに恐怖を感じているという意見も2名の被験者(被験者HとI)で報告された.
音声に関しては,赤ちゃん特有の声の高さを問題として挙げている意見が複数あった.声の高さを変えることを求める意見があったため,具体的な変更の方針などを得るために,問題となった状況などの詳細についてインタビューで確認した.その結果,特にひろちゃんが泣いている状況において,2つの問題が生じていることが明らかになった.1つはユーザ本人に対する問題であり,ひろちゃんが泣くと困って固まってしまう被験者が少なからずおり,ひろちゃんが泣き続ける状況になるため,被験者がストレスを感じて次回以降敬遠するということであった.もう1つは泣いているひろちゃんの周りにいる人間に対する問題であった.これはたとえば,ひろちゃんが泣いていると,実際にはひろちゃんと関わっていない周りの入居者から「うるさい」などの不満が出ることがあることが分かった.
その他の意見としては,手のボタンスイッチを押し続ける被験者がいるため,電源・音量ボタンの位置変更に関するものであった.
導入方法に関しては,「ロボットの名前を呼んでもらう」や「頭をなでてもらう」といったロボットに対する親密さを演出することに関する意見であった.
4. 考察と長期運用への課題
実験1により,ひろちゃんは,介護職員のみでも施設で長期的に運用できることが確認できたが,これまでの研究[12]が明らかにしてきた認知症高齢者のひろちゃんに対する受容性が,継続的な利用においては十分に保証されないことが明らかになった.ひろちゃんをあやすことは,初回はその新奇性により認知症の高齢被験者からポジティブな反応を引き出すことができる.しかし,関わりを繰り返すことで,ひろちゃんを拒絶する被験者が増えてくる.この原因について,介護者から得られた改善点やインタビュー結果から,ひろちゃんの泣き声が問題となっている可能性が示唆された.ひろちゃんが泣くことで,利用していた高齢者が戸惑い,関わることを止めてしまう.それにより加速度センサに変化がなくなるため,ひろちゃんがネガティブな感情状態になってしまい,さらに泣き続けるという悪循環に陥る.これにより,高齢者はひろちゃんの利用を敬遠するようになっているのではないかと推察された.
また,泣くことが実際にひろちゃんと関わっている高齢者だけでなく,周りの高齢者や介護職員に対しても悪影響を及ぼす可能性も示唆された.インタビューにおいて,ある介護職員は「ひろちゃんが泣いていると,あやしている高齢者に声かけをする必要がある」とコメントしており,ひろちゃんが泣くことで,ひろちゃんと関わっている高齢者に注意を向ける必要があり,介護職員の負担を増やす可能性があることが分かった.
以上のことから,ひろちゃんのように赤ちゃん型対話ロボットを介護施設に導入する際には,「泣く」というネガティブな感情表出は,実際に利用している認知症高齢者だけでなく,周りで生活している認知症高齢者や介護職員に対しても悪影響を及ぼす可能性があることが分かった.元々,泣く音声は他の赤ちゃん型の類似玩具やロボットでも一般的に含まれていた機能であること,ひろちゃんが泣くことで認知症高齢者からの働きかけを促進する可能性があることから含めていたが,むしろ泣くことによる悪影響のほうが大きいようである.何名かの高齢者はひろちゃんが泣いたとき,上手くあやして笑わせることができていたため,利用する高齢者に応じてロボット側が泣く行動を制御するというアプローチも考えられる.しかし,より多くの高齢者から簡単にポジティブな反応を引き出し続けるためには,泣く機能は無いほうが良いと考えられる.そこで,ひろちゃんを泣かないように改良し,実際に利用した高齢者からのポジティブな反応が維持されるか,また,周りの高齢者や介護職員へポジティブな影響を与えるかについて,再び長期の運用実験を通して検証した.
5. 実験2:改良したシステムを用いた長期実験
5.1 ロボットの改良
実験1の結果を踏まえ,利用する音声に修正を加えた「ひろちゃんS」を開発した.外装の修正はせず,発声制御システムのみ変更を行った.具体的には,ポジティブ,弱ポジティブ,ノーマルカテゴリに含まれる音声は残し,ネガティブ,弱ネガティブの音声を除外した.また,5分間以上ひろちゃんをあやし続ける高齢者もいたため,今回は10分間動作し続けるように変更した.ひろちゃんSを再度特別養護老人ホームに導入し,認知症高齢者がひろちゃんSを利用し続けるかと,介護職員の印象から改良したシステムが実験1で得られた課題を改善できたかを調査した.
5.2 被験者
実験は実験1と同じ特別養護老人ホームの別の階に入居している入居者10名(女性6名,男性4名)を対象に行われた.被験者の年齢は78~94歳,平均年齢は87.9歳であり,NPI-NHは0~13点,平均3.6点,CANDyは6~19点,平均11.8点であった.本研究はATRの倫理委員会からの承認を得て行われた.
5.3 実験手順
実験は14名の介護職員により,介護業務の合間に約1ヶ月,36日間にわたって行われた.スタッフは全員ひろちゃんに関する教示にも参加し,扱い方を熟知している.実験1同様,新型コロナ感染防止のため,ひろちゃんSを被験者の数だけ用意し,各被験者に1体ずつ専用のひろちゃんSを割り当てて実験を行った.実験前の介護職員への教示や,介護職員によるひろちゃんSの運用方法,ひろちゃんSに対する高齢者の反応の記録,ひろちゃんSに対する改善点や連絡事項の記録については実験1と同様である.
これらの観察記録に加え,実験後,被験者とひろちゃんSの関わりを10回以上観察した介護職員10名の内,その階のスタッフ長と,被験者全員を観察したスタッフ合計4名には個別にインタビューを行い,ひろちゃんと被験者との関わりについてより詳細な印象を収集した.また,参加した14名のスタッフにはひろちゃんSが,ひろちゃんよりも運用する際に良い印象を与えるかどうかを確認するために,使用意図,知覚された楽しさ,知覚された使いやすさについて岩村らが用いたアンケート項目[19]を用いて,ひろちゃんとひろちゃんSそれぞれについて回答してもらった.さらに,「Q1:もし,介護業務で使わなければならないとしたら,どちらのロボットを使いたいですか?」,「Q2:高齢者にとってどちらのロボットがいいと思いますか?」「Q3:もしも他の施設で10体のロボットを利用するとすれば,ひろちゃんとひろちゃんSどのくらいの割合が良いと思いますか?」の3つの質問にも回答してもらった.Q1とQ2については「ひろちゃんS」,「ひろちゃん」,「どちらともいえない」の3つから選択してもらった.Q3については,ひろちゃんSの数を0から10で選択してもらった.
5.4 分析
実験1と同様に,得られた観察記録の記述内容から被験者の反応をポジティブ,ニュートラル,ネガティブの3種類に分類し,実験期間を通したそれぞれの反応の総量と,初回と最終回の反応から被験者の態度の変化を調査した.
また,介護職員から得られた改善点などの記録やインタビューについても特徴的な点を分類し,ひろちゃんを長期的に運用するための改善点や影響について調査した.使用意図,知覚された楽しさ,知覚された使いやすさについては,ひろちゃんとひろちゃんSとの違いを調べるためにt検定を行った.3つの質問については,その回答結果からひろちゃんとひろちゃんSを比較した.
5.5 結果
5.5.1 ひろちゃんSに対する認知症高齢者の反応
実験中ほぼすべての被験者は,毎日少なくとも1回はひろちゃんSを使う機会を持つことができた.体調不良のため実施できない期間が3日間あった者が1名(被験者L),介護のスケジュールが合わず使う機会がなかった日が1日あった者が2名(被験者MとS)いた.被験者1人に対して,9~10名の介護者が観察を行った.図5に各被験者が示した反応の割合を示す.縦軸はそれぞれの被験者のIDを示している.全体を通して,ポジティブな反応を最も多く示した被験者は8名,ネガティブな反応が最も多かった被験者は2名であった.ニュートラルな反応が最も多かった被験者はいなかった.実験1の結果に比べ,ポジティブな被験者が増加し,ネガティブ,ニュートラルな被験者が減少する結果となった.
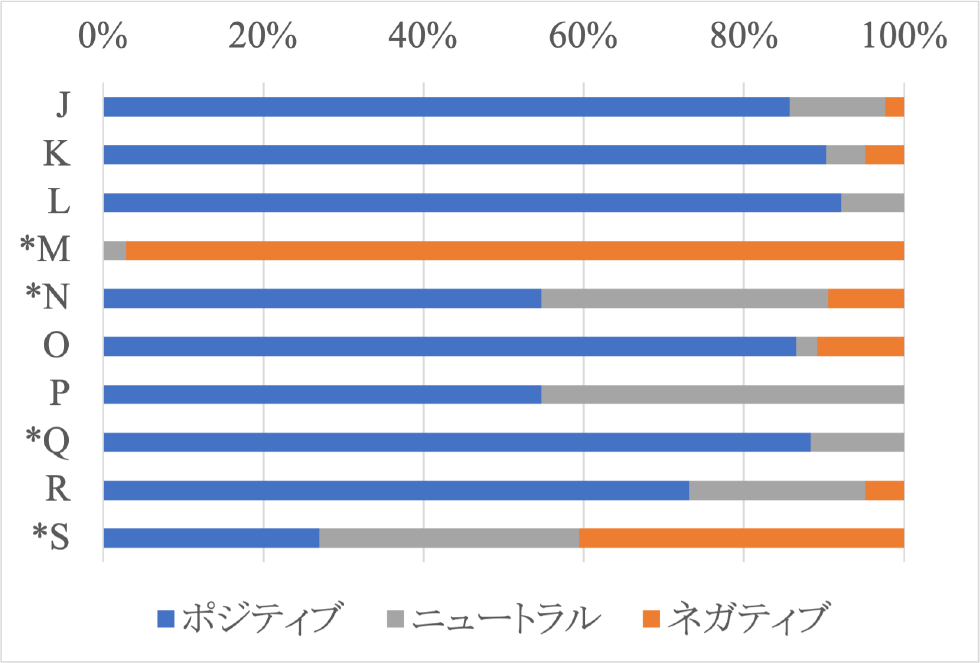
Fig. 5 Percentage of attitude shown by each subject toward Hiro-chan-S (Alphabets on the vertical axis indicate the ID of each subject, and the symbol * indicates male).
被験者のひろちゃんに対する態度は実験1に比べ,実験を通して変化しなかった.図6は,ひろちゃんSと初めて対峙したときと最後に対峙したときに被験者が示した反応の割合を示す.初回に示した態度がそのまま維持されており,実験1のようにネガティブな態度が大きく増えるといった現象は起きなかった.
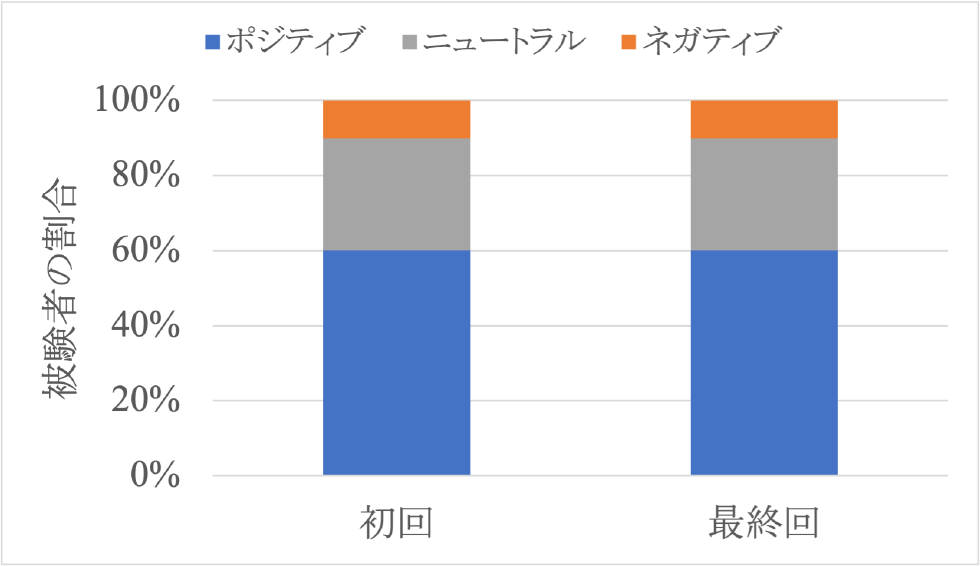
Fig. 6 Percentage of attitudes shown by subjects at the first and last trials during the introduction of Hiro-chan-S.
5.5.2 介護職員の印象
介護職員によるひろちゃんとひろちゃんSに対する知覚された楽しさ,使用意図,知覚された使いやすさについてt検定を行った結果を図7に示す.図7より,知覚された楽しさについて有意傾向が存在し,ひろちゃんSのほうが楽しく使用できたと感じる傾向があることが分かった(t(13)=−2.10,p=.056,d=.56).ここでdは効果量を示す.使用意図,知覚された使いやすさに関しては,ひろちゃんとひろちゃんSの間に有意差は存在しなかった(使用意図:t(13)=−1.08,p=.300,d=.29,知覚された使いやすさ:t(13)=−.56,p=.586,d=.14).
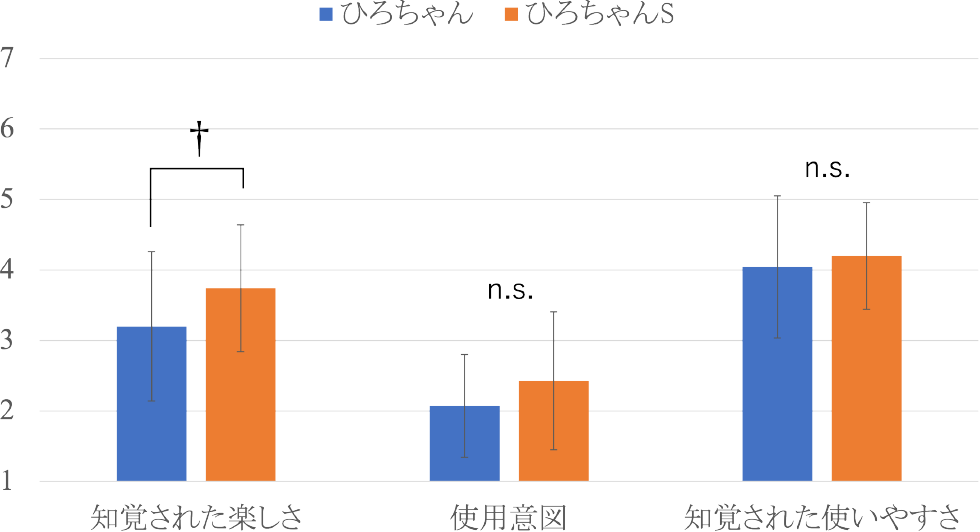
Fig. 7 Perceived enjoyment, intension to use, and perceived ease of use for each robot rated by caregivers.
ひろちゃんとひろちゃんSを比較する質問については,「Q1:もし,介護業務で使わなければならないとしたら,どちらのひろちゃんを使いたいですか?」に関しては全員がひろちゃんSを選択した.二項検定からもひろちゃんSが有意に選択されたことが確認できた(p<0.01,g=0.50,ここでgは効果量を示す).「Q2:高齢者にとってどちらのひろちゃんがいいと思いますか?」については,1名のみ「どちらともいえない」を選択したが,残りの13名は全員「ひろちゃんS」選択した.1×3のカイ二乗検定の結果,回答結果に有意差が存在することが分かった(χ2(2)=22.431,p<0.01).ライアンの名義水準を用いた多重比較の結果,ひろちゃんSを選択した被験者はどちらともいえないやひろちゃんを選択した被験者よりも有意に多いことが分かった(いずれもp<0.01).「Q3:もしも他の施設で10体のひろちゃんを利用するとすれば,ひろちゃんとひろちゃんSどのくらいの割合が良いと思いますか?」についてはひろちゃんSは平均8体(SD:1.84)が良いと回答した.
5.5.3 介護職員からの意見
実験を通して介護職員から13個の意見が寄せられた.それらは大きく「運用上の課題」(4件),「音量」(2件),「追加機能」(7件)の3つに分けられた.運用上の課題においては,被験者K,L,Qに対して運用中に生じた問題についてであった.被験者LとQに対して,1度ひろちゃんSから声が出ない状態が生じ,電池交換が必要となった.また,被験者KとLにとっては,右手の音量ボタンのクリック感が心地よかったようで,何度も押してしまい,音量調整ができなくなるという事態が発生した.そのため,予備のひろちゃんSに交換することが必要となった.
音量については,2件とも音量が小さいという指摘であった.筆者らや介護職員にとっては問題ない音量であり,最大音量の場合は少しうるさく感じるくらいであった.しかし,高齢者,特に耳の遠い方にとっては聞こえにくようである.
追加機能については,「歌を歌う機能」が3件,「しっかり座位すること」,「高齢者の言葉をまねる機能」,「高齢者に対して受け答えを行う機能」,「年齢を3段階ほど変えて高齢者に合った話しかけを行う機能」がそれぞれ1件ずつあった.
6. 総合議論
6.1 改良システムの認知高齢者への効果
2週間の導入実験において,ひろちゃんとの関わりを繰り返す過程でひろちゃんを拒絶する被験者が増えてくることが確認され,その原因はひろちゃんが表出する感情がネガティブ,すなわち泣くことによるものである可能性が示唆された.この点についてプログラム内容を改善したひろちゃんSによる約1カ月の導入実験では,2週間よりも長期にわたる実験であるにも関わらず,一貫して拒絶した1名や,日によって態度が変わった1名を除く8名が拒絶せずに継続して利用したことが確認できた.ミニマルデザイン化されたモノに対して人間は足りない部分をポジティブに補完する可能性を示唆する考えもあるが,人間側がポジティブに受け入れようとするところにネガティブな感情表現が表出されることで,人間側にとって戸惑いや不安を増長させているとも考えられる.この点,ひろちゃんSでは基本的に機嫌は良い状態で,あやすとさらに上機嫌になるようにプログラム修正をしたことで,被験者は安心して受け入れられるようになったのではないかと考察される.
6.2 パッシブソーシャルメディアとしての赤ちゃん型対話ロボット
2週間の導入実験において,ひろちゃんの泣き声が直接に利用している高齢者だけではなく,周りの高齢者や介護職員に対しても悪影響を及ぼすことが確認された.実験に参加していた介護者から,「ひろちゃんが泣いていると,あやしている高齢者に声かけをする必要がある」というコメントがあり,利用している高齢者に対して介護職員が普段以上に注意を払う必要性が増す.介護職員の負担軽減の目的からすると真逆の結果と言える.我々の従来研究では「ひろちゃんの笑い声を聞くことで癒される」という介護者からの意見があったが[12],ひろちゃんの感情表出を適切に制御しなければ直接に関わる高齢者に対しての心理的な負担増だけでなく介護職員の負担増になる可能性がある.
複数のロボットが対話など社会的な関わりを行っている場面において,それに直接関わっていない人間が見たり聞いたりすることで受動的に影響を受ける状況は,ヒューマンロボットインタラクションの分野においてパッシブソーシャルな状況として知られている.Hayashi et al.は駅に2台のロボットを配置し,それらが対話し,聴衆はそれを聞くという形式で情報提供を行った場合,ロボットと聴衆が直接対話する場合やロボット1台で対話する場合に比べ,より多くの聴衆を惹きつけることを示している[20].こういった社会的な関わりを通して周りに影響を与えるロボットを彼らはパッシブソーシャルメディアと呼んでいる.本研究は2体のロボットではなく,赤ちゃん型対話ロボットと認知症高齢者が関わる場面であるが,赤ちゃん型対話ロボットによる喃語や情動を伴う発声によって認知症高齢者との社会的な関わりが生じている.得られた実験結果は,この社会的な関わりによって,それに直接参加している人々*だけではなく,その関わりに直接参加していないが,その周りで見聞きしている人々に対しても影響を与えることを示しており,赤ちゃん型対話ロボットも社会的な関わりを通して周りに影響を与えるパッシブソーシャルメディアとして利用できる可能性を示している(図8).実際,実験1の結果で述べたように,ひろちゃんが泣くことで,周りの入居者から「うるさい」と不満がでる一方で,実験2の泣く機能を排除したひろちゃんSでは,ひろちゃんに比べて有意傾向ではあるが介護職員の楽しさが増加している.また,インタビューでも「赤ちゃんの声は可愛らしい」や「笑っている声で楽しい感じになる」といった声があり,ひろちゃんSの声を聞くことでポジティブな気分になっていると推察される.これらは赤ちゃん型対話ロボットの行動によって認知症高齢者との社会的関わりが変化し,直接関わっていない周りの人間に悪影響あるいは好影響を与えることを示唆している.つまり,赤ちゃん型対話ロボットの行動を制御することで,直接関わっていない人々に様々な影響を与えられる可能性があり,さらなる調査が必要である.
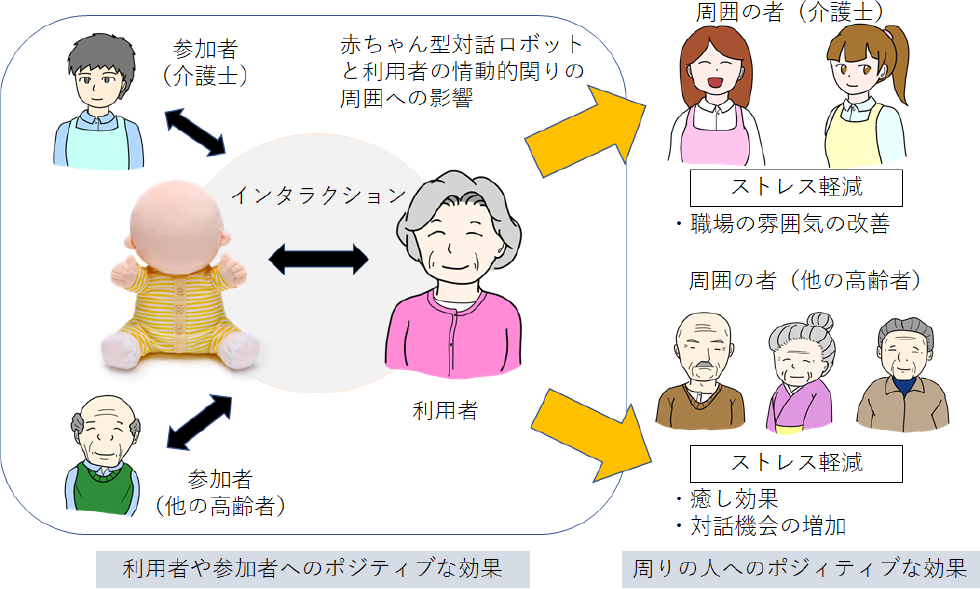
Fig. 8 Example of positive effects of a baby interactive robot as a passive social medium.
6.3 介護職員に対する負担軽減
本研究においては,介護施設へロボットが導入されると,入居者だけでなく,介護職員も影響を受ける.その影響は良いものばかりではなく,実際には介護職員の精神的ストレスや作業負担を増やす要因にもなることが近年の研究から明らかになっている[21].本研究で用いたような赤ちゃん型対話ロボットは,先行研究[13]から,認知症高齢者が何の教示もなく,人間の赤ちゃんのように扱うことや,必要があれば介護者を呼ぶことを確認しており,認知症高齢者が一人でもうまくロボットを扱ってくれるため,介護職員が使い方を教えるといった負担が少ない.
また,ミニマルデザインを採用したことで,単純な機構で動作するぬいぐるみになっており,認知症高齢者である入居者がこれを落としたり,乱暴に扱ったりしたとしても,壊れる危険性が低い.万が一壊れたとしても安価であるため,介護職員にとって扱う際の心理的負担が少ない.そのため,介護職員が他のロボットのように見守り続ける必要がなく,高齢者からの呼びかけがあるまで,安心して目を離して別の作業を行うことができると考えられる.
一方で,本研究では,認知症高齢者とロボットの関わりの長期的な変化を確認するために,介護職員にはその関わりを観察してもらっており,ロボットを認知症高齢者に預けた後,別の作業をするということを介護職員に明示的に指示していない.そのため,今後は実際に別の作業を行ってもらい,その時間を計測することを行い,赤ちゃん型対話ロボットによる業務負担の軽減について調査する予定である.
6.4 認知症高齢者と介護職員との関係性構築
長期的な運用を通した認知症高齢者や介護施設への影響についてであるが,中山らによる介護施設における動物型ロボットや対話ロボットの長期運用に関する研究では,認知症高齢者とロボットの関係性構築に介護職員の役割の重要性が指摘されている[11].
我々も実験当初から,ひろちゃんが非常にシンプルな設計思想のロボットであることから,ひろちゃんを認知症高齢者にとりあえず渡しても長期の運用ができるとは考えてはいなかった.そのため,認知症高齢者,介護職員,赤ちゃん型対話ロボットをチームと見立てて,特に認知症高齢者と介護職員の関係性があるところにロボットを介在させるという役割分担をイメージして運用を行ってきた.具体的には,ひろちゃんを介護職員が大切にしているものという設定で,認知症高齢者に対して,「これは私が大切にしている『ひろちゃん』という人形なんだけど,しばらくの間あやしておいてもらえる?」といったように,ちょっとしたタスク設定をして渡すことで,受け取った高齢者は,日ごろお世話をしてもらっている介護職員の役に立てるというモチベーションでひろちゃんと関わることができる.また,介護職員が使い方をゲームのように伝えて楽しんでもらうという方法も実施した.認知症高齢者であっても社会とのつながりを求めており,人の役に立てるということはQOL向上にもなると考えられる.こうした工夫が2つの実験の基礎にある中で,高齢者との関係性構築が容易な内部システムへ改良することで,1カ月という長期であっても継続的な運用が可能になったと考えられる.
6.5 顔のデザインの有無とコミュニケーション
我々の短期的な実験[12]で示した顔のデザインの有無がロボット利用の有無に影響がない点について,1カ月の長期導入実験でも確認できた.これまでのコミュニケーションロボットに関する研究においては,コミュニケーションロボットには顔の表情,視線の制御といったことが重要であるとされている[18].しかし本研究では,顔のデザインがなくても認知症高齢者とのコミュニケーションにおいてはデメリットにはならない可能性があり,特異な事例として今後も研究を継続すべき発見と考えている.
また,顔をデザインしていないことから,利用者の中には自分の好みの顔をデザインする人もいた.利用者が自分にとって最適と考える独自の顔や衣装をデザインすることで,その人にとって特別な存在となり,愛着要素が増すことも考えられる.この点も長期の運用を可能にした要因となっているのではないかと考えている.
6.6 情動に働きかけることによる効果
認知症の中核症状は記憶障害であるため,関わった後,しばらくすると,関わりを忘れている可能性がある.実際,我々が単純な発話制御手法を採用した理由には,健常者にとってはすぐに飽きてしまうような単純な反応でも,認知症高齢者ならば記憶障害により飽きずに関わり続けてくれるのではないかと考えたからであった.実際,実験に参加した被験者の中には,ロボットを日によって違う名前で呼ぶ者がおり,記憶に障害を抱えていることが介護職員による観察記録から確認できており,ある側面では妥当であったと言える.
このことは,実験1において被験者が時間経過とともにひろちゃんを拒絶したことや,実験2のひろちゃんSではそういったことが起こらなかったことと一見矛盾する.しかし,最近の研究から,認知症患者では,知識や理性を司る新皮質機能が衰えるが,情動記憶認知を司る大脳辺縁系の機能は比較的維持されるため,快・不快などの情動記憶は残りやすいと言われており[8],ロボットについての知識は忘れても,泣き声や笑い声によって感じたロボットに対する印象は被験者に記憶されたのではないかと考えられる.その結果,泣くなどネガティブな気持ちをもたらしたひろちゃんは敬遠され,笑うことでポジティブな印象を与えた続けたひろちゃんSは使い続けてもらえたのではないかと考える.
しかし,ロボットからのネガティブな情動表出が常に悪影響を与えるとは限らない.むしろ高齢者によってはロボットの泣き声が高齢者のポジティブな情動に結びつく可能性もある.たとえば,我々の先行研究[13]では,泣いているロボットを楽しんであやす被験者も数名いた.また,実験2に参加した介護職員へのインタビューでは,ある介護職員が,ひろちゃんSのほうが多くの方に受け入れられることを認めつつも,ひろちゃんを使った経験から,「泣いているほうが放っておけずに良い人もいた」と報告している.一方で本研究の結果から,長期的には利用者だけでなく,周囲の介護職員や高齢者への悪影響がある可能性は否めない.そのため,泣くロボットを導入するためには,たとえば,激しく泣くことは行わず,少しぐずる程度のみ行うなどの少しネガティブな感情のみを使用することや,激しく泣いた場合でも高齢者が扱いに困るような反応を示した場合には,すぐに泣き止むなど,高齢者の特性や周囲の状況などを考慮しつつ適切にインタラクションを設計することが必要であり,今後の研究課題である.
6.7 健康状態や病状に適したロボット導入指針の確立
本研究では,赤ちゃん型対話ロボットを受け入れる認知症高齢者がいた反面,一貫して受け入れなかった高齢者もいた.そのため,受け入れる認知症高齢者の性質について,調査を行うことも重要な課題である.実験を開始する前,女性のほうが子育て経験が一般的に豊富と考えられるため,長期的には,赤ちゃん型対話ロボットを受け入れ続け,男性は難しいのではないかと考えていた.しかし,図3や5に示すように,実験1と2を通して男性が特別ネガティブな反応を示しているという結果は得られていない.また,認知症の程度やBPSDの重症度で評価できるのではないかと考え,実験1と2のすべての被験者に対して,CANDyやNPI-NHのスコアと,ポジティブな反応の頻度の間の相関を分析したが,有意な相関はみられない(付録参照).そのため,今後は認知症の病状や,家族関係,個性など,利用者に関するより詳細な情報の収集と分析を通して,ロボットを導入可能な認知症高齢者の性質について評価するための指針を確立する必要がある.
人形療法においても,導入可能な患者を判定するための指針は未だ確立していない.しかし,事前に検討するために,認知症の病状や,家族関係,子供に対する反応,個性,一人一人の生きてきた過程など,患者に関する情報を記載するアセスメントシートが準備されている[22].こういったシートも参考にしながら,まずは,赤ちゃん型対話ロボット導入のためのアセスメントシートを作成し,指針の確立に向けたデータ収集が今後の重要な検討課題である.
6.8 ミニマルデザインアプローチ
本研究において,導入実験はいずれもコロナ禍で実施されている.コロナ禍が発生して以降,人の出入りが厳重に管理されていた介護施設において,この長期の導入実験が実施できたのは実験機材であるひろちゃんのコストが低廉で,実験参加者ひとりひとりに対して提供できたことと,コロナ禍によって従来以上に業務負担が増えているにもかかわらず,実験のための時間と労力を割いてもらえたのは,介護職員の献身的態度のみならず,有意差としては確認できなかったが,ひろちゃんの運用がとても簡単であったということを示していると考察される.ミニマルデザインアプローチの目的である,コスト削減と運用の容易さについて確認できた.
6.9 複数ロボットによる新たなコミュニティ形成の可能性
本研究のように複数の入居者がそれぞれロボットを所有する場合,互いのロボットについての話をすることで,より対話が促進される可能性がある.この状況は,たとえば同年代の子供がいる家族同士や,類似のペットを飼っている人同士での対話場面に近い.こういった場面では,子供やペットが起点となって家族同士,人同士のつながりが深まることがよくある.話題の中心は子供やペットであり,親や飼い主は,○○ちゃんのおとうさん,○○ママなど,それらに属すものになる.その結果,親や飼い主は自身についての情報を開示することなく,対話が続けられるため,親交を深めやすく,コミュニティを形成しやすい.子供やペットに関する悩みや思い出を共有することで,子供(ペット)との関係性が改善や親(飼い主)同士の関係性の構築が促され,多方面での親密な関係を構築できる.
本研究では,残念ながらロボットを介した高齢者同士の関わりを詳細に調査することはできなかったが,同じロボットを所有する者が共生することでこういったコミュニティが形成される可能性がある.ロボットの扱い方のうまい人が,そうでない人に「こうやってあやすと,ほら,凄くご機嫌になるでしょ」とあやし方を教えたり,顔の有無や顔の違い,服の違いなど,それぞれのロボットの個性について話をしたりすることが入居者間で生じるのかについて調査することは興味深い今後の検討課題である.
また,本研究で用いた赤ちゃん型対話ロボットはそれぞれ独立しているが,互いに無線で通信することができれば,ロボット同士で何か対話をしているように感じられる状況を作り出すことや,他のロボットに呼びかけて入居者が集まるように仕向けるなど,ロボット同士が積極的に関わることで,入居者同士のコミュニティ形成を促すことも支援できる可能性がある.
6.10 本研究の限界
本研究においては,被験者数が少ないため,被験者数を増やして結果を確認する必要がある.特に本研究では男女で影響に差はみられなかったが,男性被験者の数が少ないため,男性に対する影響を十分に調査してきれていない可能性はある.一方で,人形療法の研究では,赤ちゃんをかわいがろうとする気持ちは,男女の差,子育て経験の有無による差はあまりないとされているため[22],性別は大きく影響しない可能性もある.この調査のためには,全体の被験者数を増やすだけでなく,男性被験者の割合を増やすことが重要であるが,認知症高齢者は女性が圧倒的に多く[17],1施設での実験では多くの被験者を集めることは難しい.そのため,複数の施設にまたがって実験を行い,男性被験者の数を増やし,男性に対する影響を調査する必要がある.
本研究では,顔のデザイン自体も認知症高齢者に委ねた.これは我々の先行研究[13]により,顔の有無が有意な差を生じなかったため,高齢者の想像を促進する可能性と自身で顔をデザインすることで愛着が高まる可能性を考えたためである.しかし,本研究ではこれらの効果については十分に検討できていない.あらかじめ顔をつけたロボットも同様に長期的に導入し比較することも必要であると考える.この比較には本研究のような簡易的な観察記録だけでは不十分であり,高齢者とロボットの関わりをより詳細に観察することが必要であると考える.そのため,高齢者の反応をビデオで撮影し分析することも踏まえた調査が今後の検討の課題である.
7. おわりに
本研究では,赤ちゃん型対話ロボットの介護施設での2週間の導入実験を行い,さらに導入実験から得た知見をもとに,ロボット内のプログラム修正を実施し,1カ月にわたる長期の導入実験を実施した.その結果,ミニマルデザインアプローチで開発された赤ちゃん型対話ロボットでも,感情表出をポジティブな印象を与えるものに限定することと,介護現場での運用の工夫で長期に運用ができる可能性が示された.さらに,赤ちゃん型対話ロボットがパッシブソーシャルメディアとして利用者だけにとどまらず,周囲の人たちにも良い影響を与えることも確認された.今後は,導入実験で明らかになった課題への対応方法を検討しつつ,より長期の導入実験を実施し,改善を加速していきたい.
謝辞 本研究はJST,CREST,JPMJCR18A1の支援を受けたものです.実験に協力いただいた隆生福祉会特別養護老人ホーム「ゆめパラティース」のスタッフ,入居者およびそのご家族に感謝いたします.
参考文献
- [1] Livingston, G. et al.: Dementia prevention, intervention, and care, The Lancet, Vol.390, pp.2673–2734 (2017).
- [2] Livingston, G. et al.: Dementia prevention, intervention, and care: 2020 report of the Lancet Commission, The Lancet, Vol.396, pp.413–446 (2020).
- [3] Cerejeira, J., Lagarto, L. and Mukaetova-Ladinska, E. B.: Behavioral and Psychological Symptoms of Dementia, Frontiers in Neurology, Vol.3, DOI: 10.3389/fneur.2012.00073. (2012).
- [4] Azermai, M. et al.: Systematic appraisal of dementia guidelines for the management of behavioural and psychological symptoms, Ageing Research Reviews, Vol.11, No.1, pp.78–86 (2012).
- [5] Broadbent, E., Stafford, R. and MacDonald, B.: Acceptance of Healthcare Robots for the Older Population: Review and Future Directions, International Journal of Social Robotics, Vol.1, pp.319–330 (2009).
- [6] Cohen-Mansfield, J. et al.: Can Persons With Dementia Be Engaged With Stimuli? The American Journal of Geriatric Psychiatry, Vol.18, No.4, pp.351–362 (2010).
- [7] James, I. A., Mackenzie, L. and Mukaetova-Ladinska, E.: Doll use in care homes for people with dementia, International Journal of Geriatric Psychiatry, Vol.21, No.11, pp.1093–1098 (2006).
- [8] 西川 隆,大西久男:認知症の原因疾患による症状行動の特徴とケアの方針,Journal of Rehabilitation and Health Sciences, Vol.7, pp.1–7 (2009).
- [9] Mitchell, G., McCormack, B. and McCance, T.: Therapeutic use of dolls for people living with dementia: A critical review of the literature, Dementia, Vol.15, No.5, pp.976–1001 (2016).
- [10] 加納正芳,清水太郎:なにもできないロボットBabyloidの開発,日本ロボット学会誌,Vol.29, No.3, pp.298–305 (2011).
- [11] 中山絵美子他:介護保険病床を有する病院スタッフから見た認知症症状を有する患者へのコミュニケーションロボットの導入・継続に成功した要因,看護理工,Vol.7, pp.116–129 (2020).
- [12] Sumioka, H. et al.: Acceptance of a minimal design of a human infant for facilitating affective interaction with older adults: A case study toward interactive doll therapy, 29th IEEE International Conference on Robot and Human Interactive Communication, pp.775–780 (2020).
- [13] Sumioka, H. et al.: A Minimal Design of a Human Infant Presence: A Case Study Toward Interactive Doll Therapy for Older Adults With Dementia, Frontiers in Robotics and AI, Vol.8, DOI: 10.3389/frobt.2021.633378. (2021).
- [14] Sumioka, H.: et al. Minimal Human Design Approach for sonzai-kan Media: Investigation of a Feeling of Human Presence, Cognitive Computation, Vol.6, pp.760–774 (2014).
- [15] 繁信和恵他:日本語版NPI-NHの妥当性と信頼性の検討,BRAIN and NERVE, Vol.60, No.12, pp.1463–1469 (2008).
- [16] 大庭 輝他:日常会話式認知機能評価(Conversational Assessment of Neurocognitive Dysfunction; CANDy)の開発と信頼性・妥当性の検討,老年精神医学雑誌,Vol.28, No.4, pp.379–388 (2017).
- [17] Fukawa, T.: Prevalence of Dementia Among the Elderly Population in Japan, Health and Primary Care, Vol.2, No.4, pp.1–6 (2018).
- [18] 橋本卓弥:ロボットの表情とコミュニケーション,基礎心理学研究,Vol.34, No.1, pp.134–138 (2015).
- [19] 岩村大和他:高齢者を対象とした買い物支援ロボットの雑談と外観の影響,日本ロボット学会誌,Vol.31, No.1, pp.60–70 (2013).
- [20] Hayashi, K. et al.: Humanoid robots as a passive-social medium: A field experiment at a train station, Proceedings of the Second ACM SIGCHI/SIGART Conference on Human-Robot Interaction, pp.137–144 (2007).
- [21] Persson, M., Redmalm, D. and Iversen, C.: Caregivers' use of robots and their effect on work environment – a scoping review, Journal of Technology in Human Services. pp.1–27 (2021).
- [22] 芹澤隆子:心を活かすドールセラピー,出版文化社 (2003).
脚注
- * 認知症高齢者1名に限らず,ロボットとの社会的な関わりに複数の認知症高齢者や介護職員が直接参加している場合もあるため,人々としている.
付録
付録A.1 認知症高齢者の認知症スコアとロボットへのポジティブ反応の関係
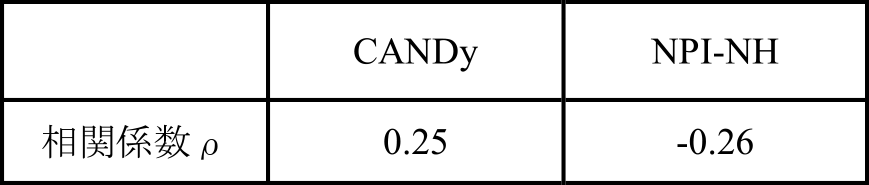
どういった認知症高齢者が赤ちゃん型対話ロボットに対してポジティブな反応を示すのかを調査するために,実験1と2の全ての被験者に対して,CANDyやNPI-NHのスコアと,ポジティブな反応の回数の間の相関をスピアマンの順位相関を用いて分析した.その結果を表1に示す.いずれの結果も有意な相関ではない.
Table 1 Correlation between the number of positive responses and dementia scores in older people with dementia (Spearman's ρ).
大和 信夫(学生会員)
北陸先端科学技術大学院大学先端科学技術研究科博士後期課程在籍.ヴイストン株式会社代表取締役社長,一般社団法人i-RooBO Network Forum副会長.防衛大学校理工学部卒業.2007年経済産業省「日本ものづくり大賞 優秀賞」受賞,ものづくり名人,2013年日本機械学会教育賞受賞.

住岡 英信(非会員)
2008年大阪大学大学院工学研究科博士後期課程修了.工学博士.2008年より日本学術振興会特別研究員(DC2),2009年よりスイス,チューリッヒ大学シニアアシスタントを経て,2012年よりATR石黒浩特別研究室の研究員.現在,ATR石黒浩特別研究所存在感メディア研究グループグループリーダ.人の存在感を持つミニマムロボットシステムの研究開発,人間とロボットの触れ合い,対話ロボットによる高齢者支援,ロボットの生体影響調査に興味を持つ.
石黒 浩(正会員)
1991年大阪大学大学院基礎工学研究科博士課程修了.工学博士.その後,京都大学情報学研究科助教授,大阪大学工学研究科教授等を経て,2009年より大阪大学基礎工学研究科教授.ATR石黒浩特別研究所客員所長(ATRフェロー).2017年から大阪大学栄誉教授.専門は,ロボット学,アンドロイドサイエンス,センサネットワーク等.2011年大阪文化賞受賞.2015年文部科学大臣表彰受賞.

神田 陽治(正会員)
北陸先端科学技術大学院大学先端科学技術研究科(知識科学系)教授,研究科長,副学長.1986年,東京大学工学博士.富士通研究所,富士通を経て,2011年より現職.知識科学,サービス科学,価値創造の研究に従事.

塩見 昌裕(正会員)
2007年大阪大学大学院工学研究科知能・機能創成工学専攻博士後期課程修了.博士(工学).ATRインタラクション科学研究所,エージェントインタラクションデザイン研究室室長としてコミュニケーションロボットの研究に従事.コミュニケーションロボット,集団とロボットの相互作用,ソーシャルタッチに興味を持つ.
再受付日 2022年3月25日
採録日 2022年5月20日