電気自動車の仮想配電線への利活用のための実証実験およびエネルギーシステムの構築
Demonstration Experiments and Development of Energy System for Utilization in Virtual Distribution Lines of Electric Vehicles
1. はじめに
未来の産業創造と社会変革に向けた新たな価値創造を目標として,Society 5.0の実現に向けて活発な取り組みがなされている.特に,電力・エネルギーシステムはその根幹となるシステムであり,SDGsにおける「エネルギーをみんなにそしてクリーンに」や「住み続けられるまちづくり」といった開発目標を実現するためにも解決すべき課題は多い.Society 5.0においては,サイバー空間(仮想空間)とフィジカル空間(現実空間)の融合が基盤になるとされている.特に,個々に存在する情報に人がアクセスして入手・分析していたSociety 4.0に対して,人工知能(Artificial Intelligence:AI)を介在したデータとのコミュニケーションと高付加価値のフィードバックがSociety 5.0の特徴である.そのため,近年では,電力・エネルギーシステムにおいてもAIを積極的に活用する動きがあり,様々な技術やシステムが提案[1], [2]されている.
さらに,電力・エネルギー分野では,低炭素・脱炭素化を目的に,太陽光発電(PV)をはじめとした再生可能エネルギー,運輸分野では電気自動車(EV)をはじめとした電動車の導入拡大[3]が進展している.また,近年,大規模自然災害を原因とする停電が多発・長期化している.我が国では,2018年9月6日未明に発生した北海道胆振東部地震に起因する我が国初のブラックアウト[4]や,2019年9月9日早朝,関東を直撃した台風15号による千葉県での長期にわたる停電[5]は記憶に新しい.
このため,電力ネットワークのレジリエンス強化として,様々な項目が検討課題としてリストアップされている.たとえば,文献[5]では,台風に対し,送配電網の強靭化・スマート化,無電柱化,重要な施設への自家発電設備の導入,また,分散型グリッドの推進などが列挙されている.特に,EVは大容量の蓄電池を動力源としているため,「動く蓄電池」としての活用[6]が期待されている.実際,千葉では多数のEVを活用し,地域を巡回して停電している需要家に給電する活動[7]が報告されている.
これらを背景に,筆者らは,金沢工業大学にて実施中の「再生可能エネルギーベストミックスのコミュニティモデル実証実験設備」[8], [9]を活用して,金沢工業大学の通電している扇が丘キャンパスから,模擬停電している白山麓キャンパスへ向けて,EVを活用して電力を輸送する,EV仮想配電線の実証実験[10], [11]を行っている.また,EV仮想配電線を実現するシステムの検討・構築も実施しており,機械学習(深層学習)を活用した電力の消費や発電を予測する予測システムや,最適化技術を活用した電力供給機器の運用計画を策定するシステムの研究開発を行っている.
本稿では,まず,本研究で想定しているEV仮想配電線について説明する.次に,これまでに実施した実証実験の結果について報告する.そして,実証実験の結果を基に本研究で考えるEV仮想配電線において必要となるシステムについて検討し,構築したプロトタイプシステムである太陽光発電量や電力需要量を深層学習により予測する機能や,予測値に基づいてEVの運用計画を最適化する機能について説明する.最後に,そのシステムの有効性を確認するために実施した評価実験の結果について説明し,今後の展望について説明する.
2. EV仮想配電線
本研究におけるEV仮想配電線の概要を図1に示す.EV仮想配電線では,通電地域と停電地域において通電地域でEVに充電した電力を停電地域に輸送し,輸送されたEVの電力を活用して停電地域の電力需要家を自立運転させる.
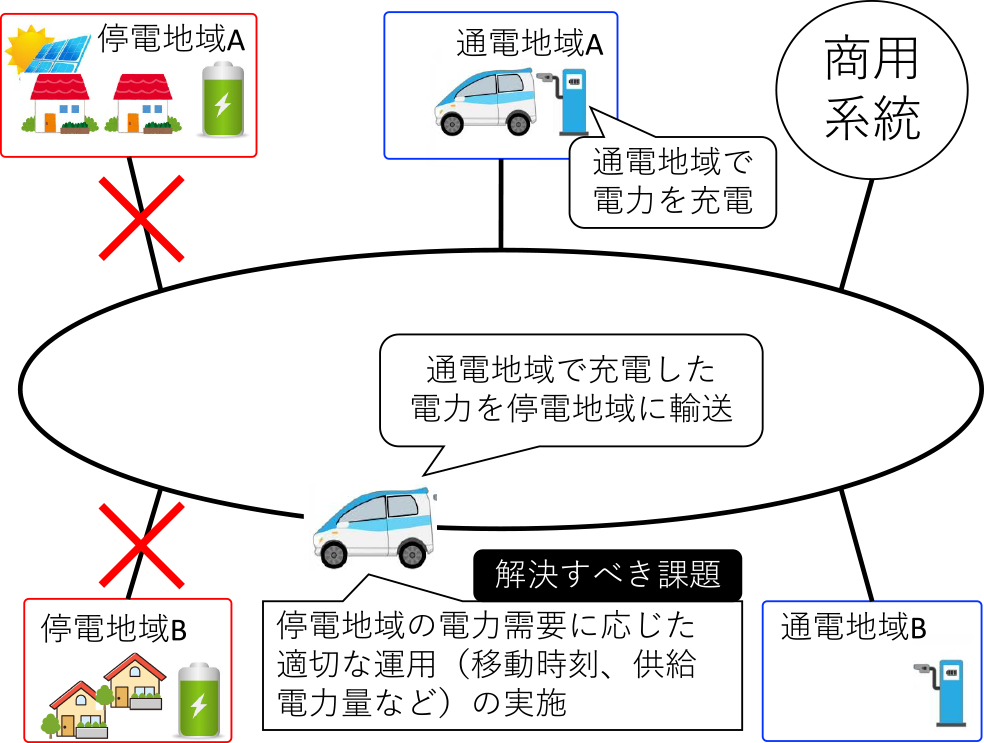
Fig. 1 Overview of EV virtual distribution line.
金沢工業大学では,石川県内に複数のキャンパスを保有しており,今回は,扇が丘キャンパス(石川県野々市市,以下,扇ヶ丘)と白山麓キャンパス(石川県白山市,以下,白山麓)を活用して,この2箇所の間でEV仮想配電線を実施している.実証実験に際しては,次のように停電を模擬した.商用系統停電のため白山麓に存在する教職員寄宿舎(以下,コテージ)を自立運転するものとし,商用系統が停電しておらず通電している扇が丘から電気をEVで輸送する.コテージには太陽光発電(PV),蓄電池(BAT)とEV双方向充給電器(EV給電器)が設置されており,BATのみで自立運転を行う.EVから給電された電力は,蓄電池に充電されるとともに,家電(照明,エアコン等)の消費電力としても供給される.
3. EV仮想配電線の実証実験
実証実験[8], [9]は,2019年度から年に数回実施しており,それぞれ異なる設備構成にて実施した.実証実験の概要およぶシステムの構成を図2に,2019年度から2021年度までの実証実験に用いた設備構成を表1に示す.キャンパス間は,走行距離で約30 km離れており,扇が丘から白山麓へ向かうときは「登り」,逆は「下り」である.白山麓では,コテージは実証実験用の無人1世帯を対象とした.システム構成としては,通電地域には電力を輸送するためのEV,停電地域(コテージ)には,PV,BAT,一般負荷を設定した.さらに,停電地域の電力状況を把握するための計測・制御システムや監視制御画面を構築し,学内LANにより計測したデータなどを管理する仕組みを構築して実証実験を実施した.
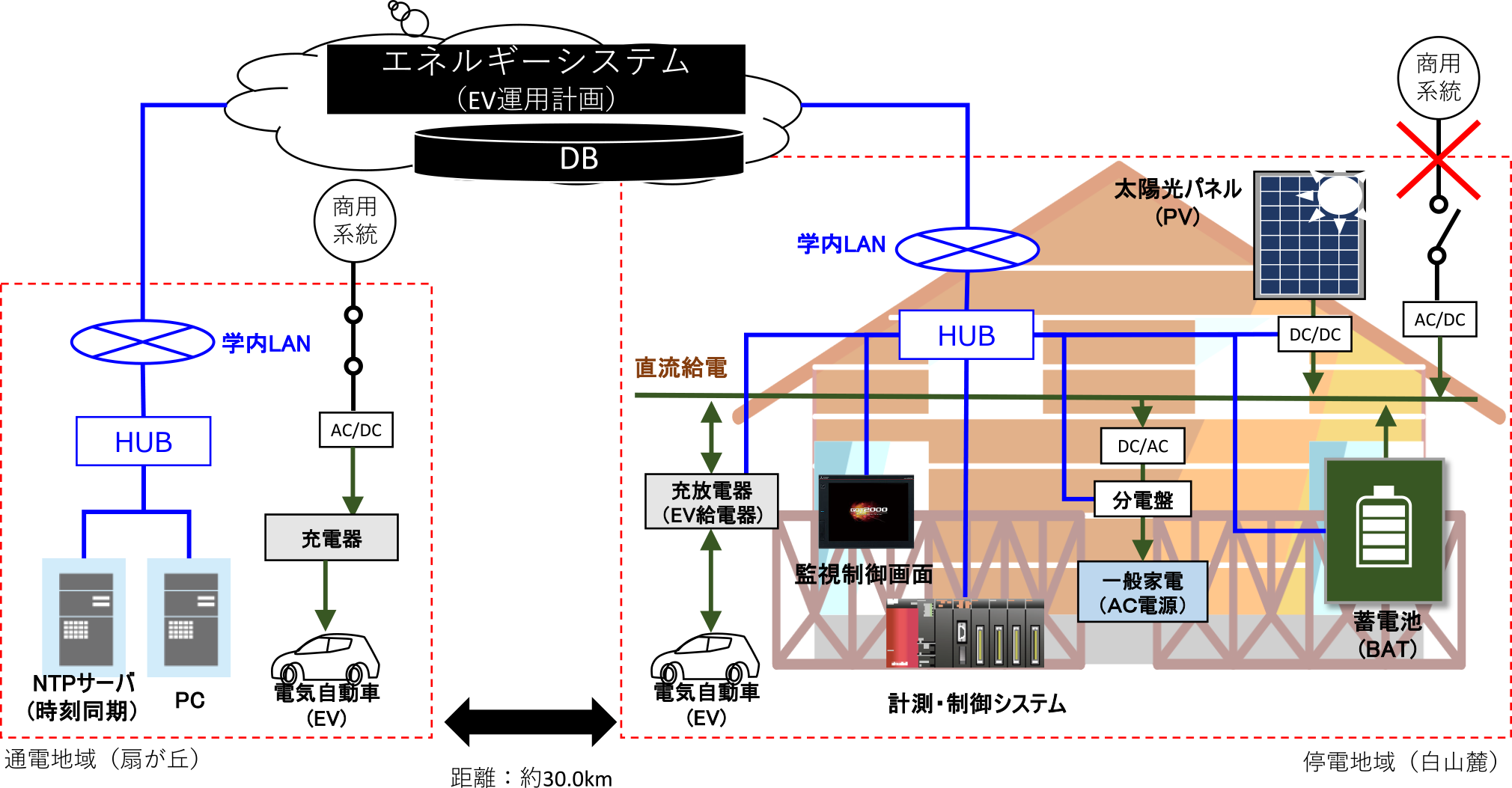
Fig. 2 Outline of experiments and system configuration.
Table 1 Demonstration experiment equipment configuration.

実証実験は,3日間連続で実施した.3日間(72時間)の設定値は,中央防災会議,防災基本計画において「発災当初の72時間は,救命・救助活動において極めて重要な時間帯である」と定義[12]されており,経験的にも,72時間あればほぼ停電が復旧していることが多いためである.以降では,これまでの実証実験の結果について説明する(2019年度,2020年度の実証実験の結果の詳細は文献[10], [11]を参照).
3.1 2019年度と2020年度の実証結果
2019年度の実証実験は,2019年10月28日(月)から10月30日(水)にかけて実施した.2019年度の実証では,表1に示すように,電力を供給する設備としては,電力を輸送するためのEV,蓄電池のみで実施した.模擬停電発生後,コテージ内ではBATだけから電力が供給されるため,BATの蓄電量は時間とともに低下し,3日目に蓄電池の蓄電量がなくなり,コテージが停電する結果となった.その理由としては,1日目の扇が丘への到着(白山麓からの出発)が遅くなり,2日目の扇が丘出発までの間にEVに十分な充電を行うことができず,結果,2日目のEVから電力供給が少なくなり,BATからの電力供給量が増えてしまい,3日目の朝のEVが到着する前にBATの蓄電量がなくなり,コテージへの電力供給ができなくなり,停電が発生した.
2020年度の実証実験は,2019年度の結果を受けて設備構成を変更して実証実験を行った.具体的には,EVを2台(1台は蓄電池として代用)とし,1台は白山麓に停車しており,白山麓内に設定したEV充電器を活用して充電を行えるようにした.また,2019年では使用しなかったPVも活用し,コテージに電力供給を行うようにした.実証実験は,2020年7月22日(水)から2020年7月24日(金)にかけて実施した.実証結果としては,3日間停電することなく,コテージに電力を供給することができ,PVの再生可能エネルギーの積極的な活用が確認できたが,コテージ内に設置されているBATがあまり活用されずに,2台のEVの活用がメインとなる形となった.
3.2 2021年度の実証結果
2021年度の実証実験は,PVおよびBATの設備を追加して実証実験を行った.具体的には,PVを1台とBATを1台追加し,停電地域である白山麓のコテージへの電力供給可能量を増加させた.このような設備構成とした理由は,2020年度において蓄電池2台(1台はEV)と電力を輸送するEV1台で電力供給が可能であることが分かり,蓄電池の代わりにしていたEVを蓄電池に変更し,不足分をPVで補い,さらに,天候の影響を受けやすいPVの発電量の影響も把握するためである.
実証実験は,2021年6月18日(金)から6月20日(日)にかけて実施した.このときのEV運行状況を表2に示す.なお,各地点の出発時刻は当日の天候を基に決定した.実証実験の結果を図3から図6に示す.1日目は,模擬停電発生後,コテージ内では蓄電池から電力が供給されるため,図5に示すように,BATの蓄電量(以下,SOC(State of Charge))が時間とともに低下する.図4に示すように,PVの発電が開始すると,徐々に蓄電池から電力供給が少なくなり,発電量がコテージの消費電力を上回ると,余剰電力が蓄電池に充電され,また,EVが白山麓に到着後は,EVからも蓄電池に電力が供給されるため,BAT-SOCが増加する.そして,PVの発電量が少なくなると,再び,蓄電池から電力が供給され,最後に,EVからの電力が供給され,EVが白山麓を出発して以降は,蓄電池のみで電力供給を実施している.
Table 2 EV operation status in 2021.
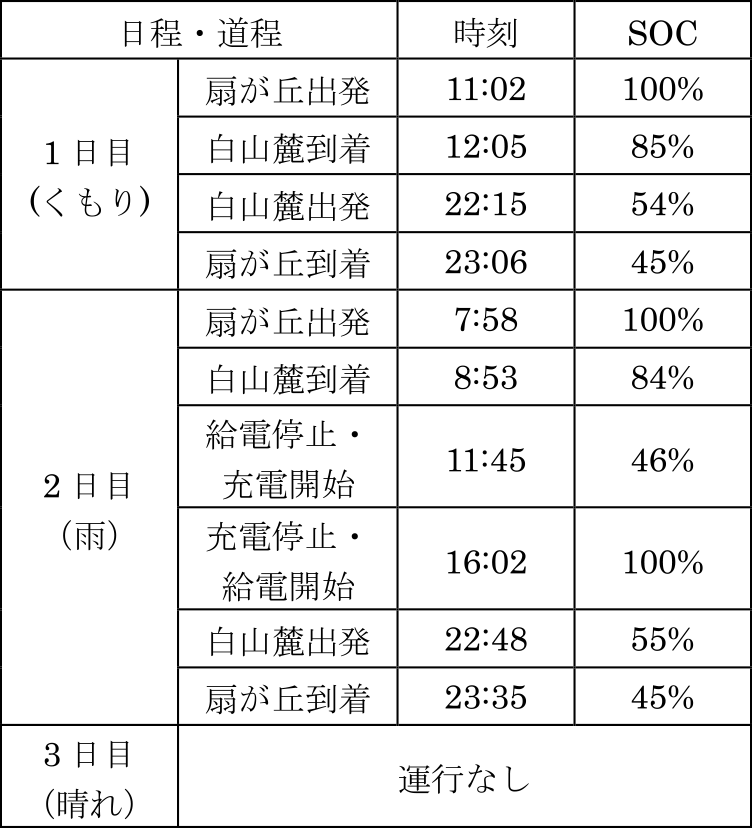
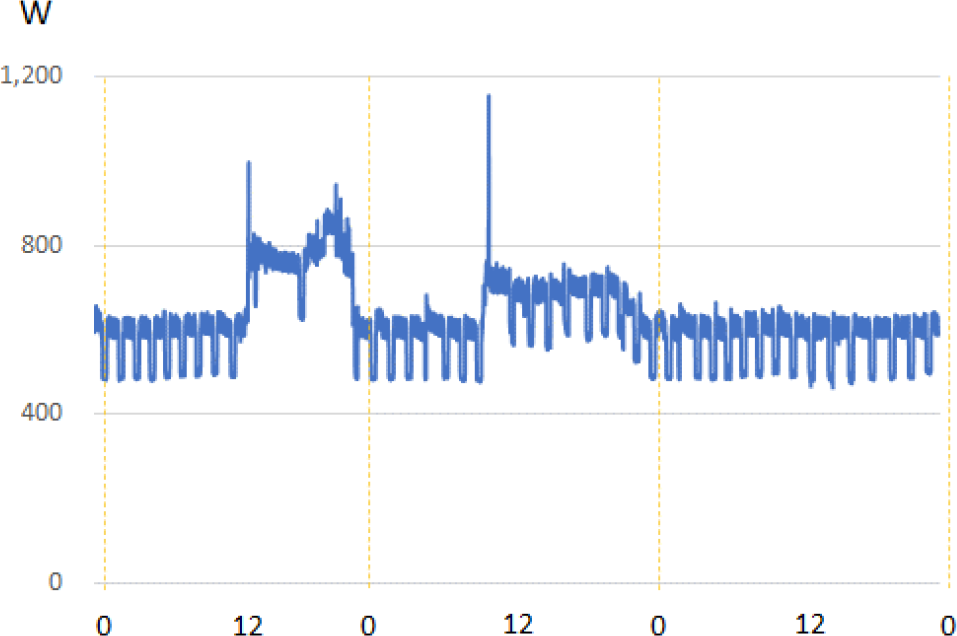
Fig. 3 Cottage power consumption.
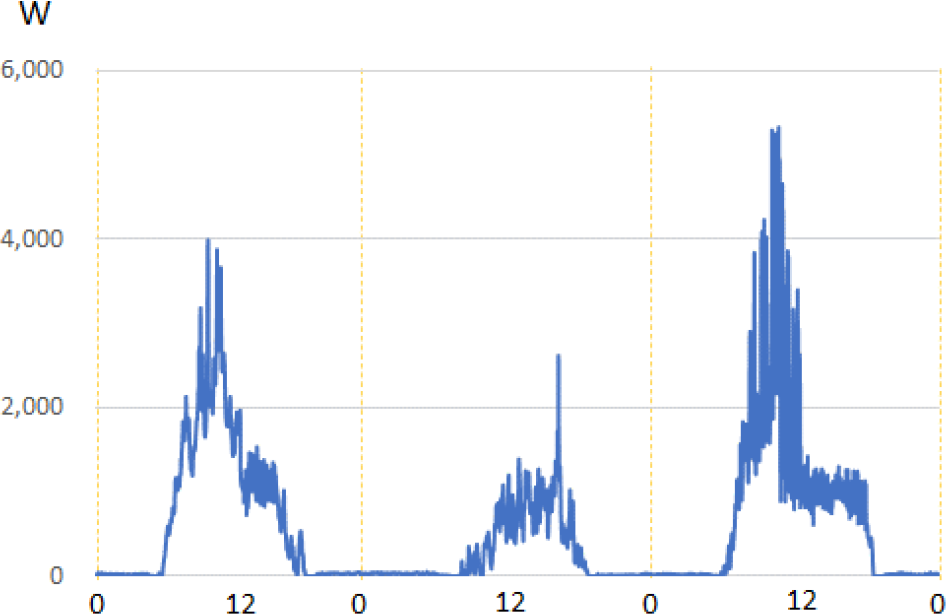
Fig. 4 PV power generation value.
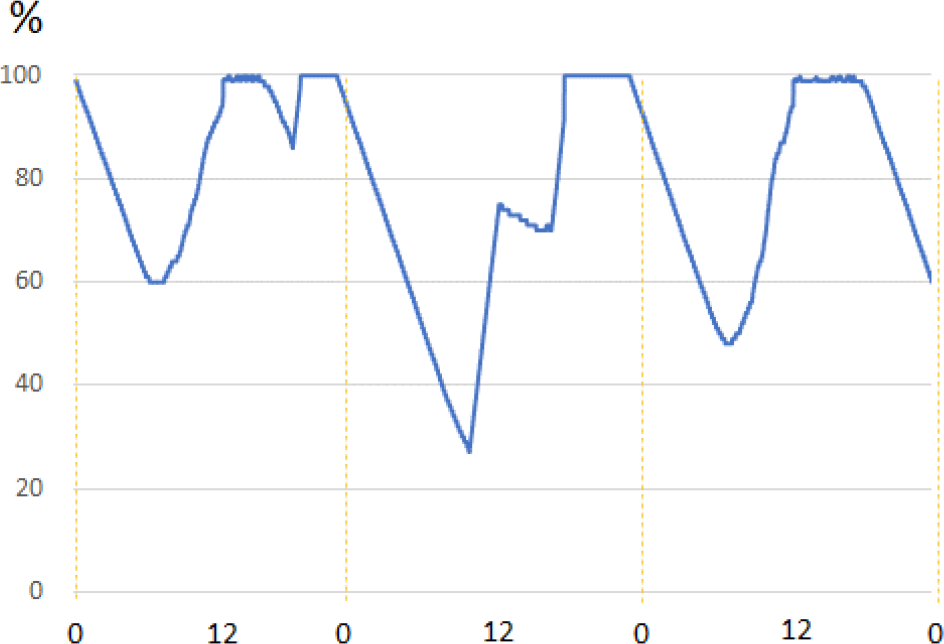
Fig. 5 Changes of BAT-SOC.
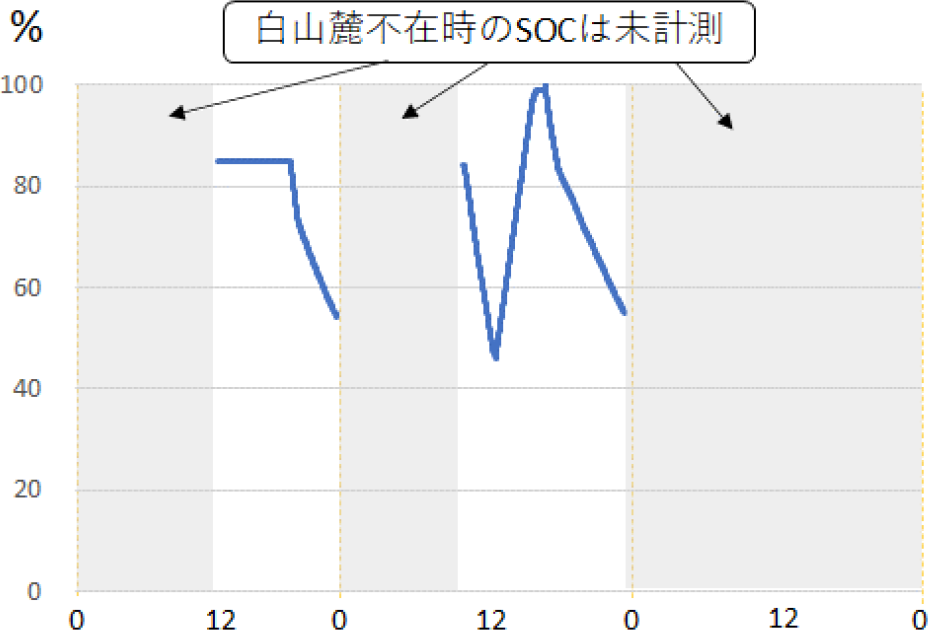
Fig. 6 Changes of EV-SOC.
次に,2日目においては,夜中から朝方にかけては1日目からの延長で白山麓のBATから電力供給が行われ,EVが白山麓に到着後は,EVから蓄電池の電力供給が行われるため,EVとPVの余剰電力によって蓄電池のSOCは増加する.2日目において,PVの発電量の多い時間帯(余剰電力の多い時間帯)に蓄電池だけでなく,EVにも余剰電力が供給されたため,夕方のPVの発電量が少なくなるころにEVから蓄電池の電力が供給される形となった.そして,EVが白山麓を出発して以降は,1日目同様,蓄電池のみで電力供給が実施している.
最後に,3日目においては,天候が晴れでPVの発電量も3日間の中で最も多かったため,EVは白山麓へは向かわず,蓄電池とPVのみで電力供給を行う結果となった.そして,全体的な結果としては,3日間停電することなく,コテージに電力を供給することができた.
4. EV仮想配電線向けシステムの構築
前章では,2019年度から実施してきたEV仮想配電線の実証実験の結果について説明した.本章では,EV仮想配電線向けシステムについて説明する.
4.1 システム構築の必要性
システムの内容の説明の前に,EV仮想配電線向けシステムの構築の必要性について説明する.前述のとおり,筆者らは2019年度からEV仮想配電線の実現に向けた実証実験を行ってきた.2019年度の実証では,EVの移動タイミングの影響により,途中で停電地域のBATの容量がなくなってしまい,停電が発生するという結果になった.また,2020年度の実証では,3日間停電することなく,実証を終えることができ,PVの再生可能エネルギーの積極的な活用が確認できたが,コテージ内に設置されているBATがあまり活用されずに,2台のEVの活用がメインとなる形となった.2021年度は,実証設備の増設を行い,その状況下において実証実験を行った.結果は前述のとおりであり,2日目には,通電地域から電力を輸送するEVに昼間の余裕がある時間帯に電力を充電することで,夕方に蓄電池に対して電力を供給することを可能にし,その結果,3日目はEVを停電地域に移動させることなく,蓄電池とPVのみでコテージの電力を賄うことができた.
ただし,EVをどのように使用するのかについては,当日のコテージの電力需要量やPV発電量によって大きく異なる.また,当日の状況に応じて人手でEVの運行計画を検討することは非常に手間であり,また,適切な運行計画になるとは限らない.そのため,状況に応じてEVの運行計画などを決定するシステムが必要であると考える.そこで,今回,EV仮想配電線向けシステムの構築について検討を行った.次節では,検討したシステムの内容について説明する.
4.2 システム構成
本節では,EV仮想配電線向けシステムについて説明する.システムの構成を図7に示す.本システムでは,気象データ取得機能,PV発電量予測機能,電力需要予測機能,EV運行計画作成機能から構成される.気象データ取得機能では,気象庁[13]やOpenWeather [14]などの気象データ提供サービスから気象データを取得する.PV発電量予測機能では,当日の天候状況(気象データ)からPVの発電量を予測する.電力需要予測機能では,当日の天候状況(気象データ)からコテージの電力需要(電力消費量)を予測する.EV運行計画作成機能では,PV発電量予測によって算出されたPV発電量の予測値,電力需要予測機能によって算出された電力需要の予測値を基に,当日のEVの運行計画を作成する.
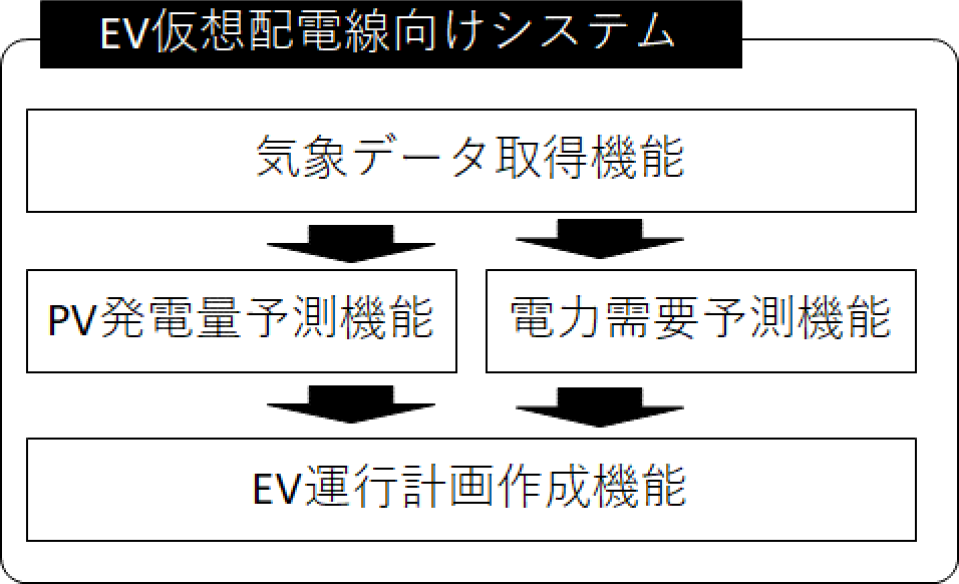
Fig. 7 System configuration for EV virtual distribution lines.
なお,本実証実験では,通電地域1か所,停電地域1か所の2か所のみで,電力供給期間が3日間と運用計画を作成する規模は大きくないが,実際は複数の停電地域を1台のEVで電力を輸送することや,複数のEVで複数地域(通電地域および停電地域ともに複数)への電力輸送が想定される.その場合,人手による運用計画の作成は不可能になると考えられる.そこで,本稿では,EVの運用計画を自動で作成するEV運用計画作成機能についても検討する.
また,本システムは,1時間周期のデータを扱う.つまり,PV発電量予測や電力需要予測の予測値は1時間の電力量であり,EVの運用計画も1時間を1コマとした計画を作成する.一般的に,電力・エネルギー分野における運用計画は30分周期[15]とすることが多い.ただ,本実証実験における地点間の距離やPV発電量や電力需要量の変動の幅などから30分周期である必要はないと考えた.また,データの周期を長くすることで,扱う問題の規模を小さくすることができる.これらのことから本システムでは扱うデータの周期を1時間とする.以降では,PV発電量予測機能,電力需要予測機能,EV運行計画作成機能の詳細は次で説明する.
4.3 PV発電量予測機能
本節では,PV発電量予測機能について説明する.本機能では,当日の気象予報データを用いてPV発電量を予測する.筆者らは,これまでPV発電量の予測技術に関する研究開発[16], [17]を行ってきた.本システムにおいても先行研究で開発した技術を活用する.先行研究では,気象データ(気温,日照時間,降水量,積雪量)とPV発電量の実績値の関係を深層学習[18]により学習し,予測する技術について検討してきた.先行研究における深層学習のネットワークモデルを図8に示す.図8に示すように,入力層が4ユニットで入力データである気温,日照時間,降水量,積雪量の4つ,出力層は,1ユニットで,PV発電量の1つとし,各層は全結合とする.そして,中間層については,事前検討の中で最も精度が良好だった構成を採用し,層数を19,ユニット数を19とするネットワークを構築した.また,活性化関数には,ReLU(Rectified Linear Unit)を使用し,予測モデルの構築には,誤差逆伝搬法を用い,最適化関数には,Adamを使用した.
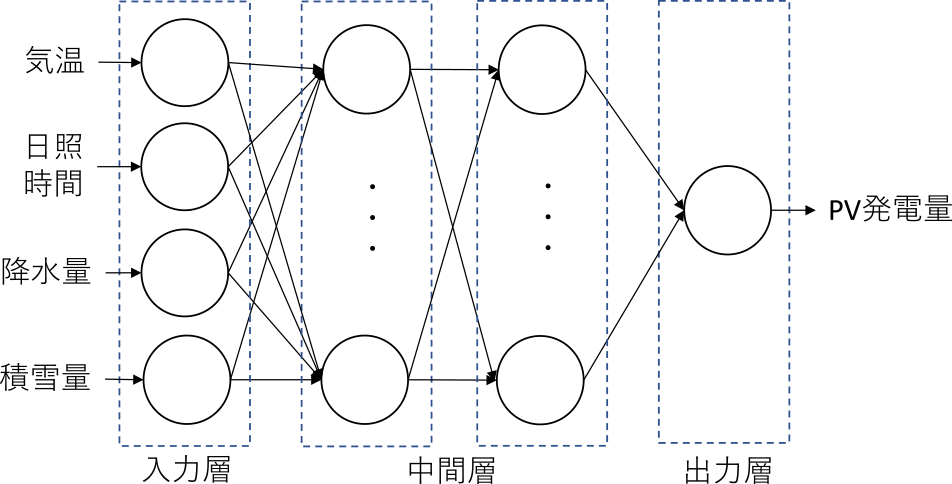
Fig. 8 Network model for PV power generation prediction.
そして,上述の方法で構築した予測モデルを用いて,予測対象日時のPV発電量を予測する.具体的には,図9に示すように,予測対象日時(たとえば,2021年6月18日の7時)の気象データ(気温,日照時間,降水量,積雪量)を予測モデルの入力データとし,予測対象日(2021年6月18日の7時)のPV発電量を予測し,次の時刻を対象にして,同様の処理を予測期間で繰り返し実施することで,必要な予測値を算出する.
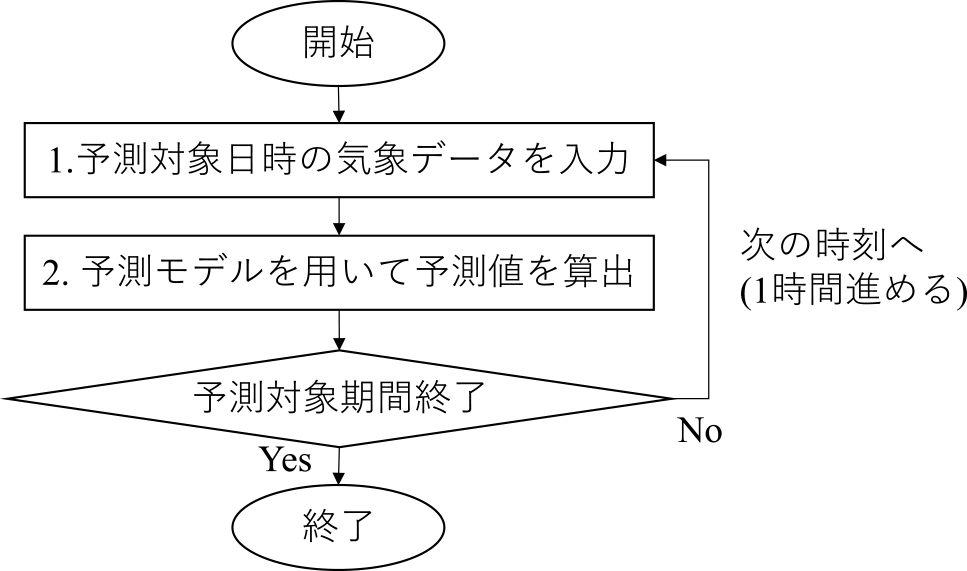
Fig. 9 Flow of calculation of predicted value for target period.
4.4 電力需要予測機能
本節では,電力需要予測機能について説明する.本機能では,PV発電量予測機能と同様,当日の気象予報データを用いて電力需要を予測する.電力需要予測に関しては,以前は気象データを用いて重回帰分析を基に回帰モデルを構築して予測手法[19], [20]があり,近年では,PV発電量予測同様,深層学習による気象データと電力需要の関係を学習させた学習モデルによる予測手法[21], [22]がある.また,前述の手法においても気象データの中でも気温データを必ず使用しており,気温データと電力需要との相関が高いことが知られている.
そこで,本研究においても気温データを用いて電力需要を予測する.なお,電力需要の予測には,PV発電量予測機能と同様で気温データと電力需要の関係を深層学習により学習し,予測する.電力需要予測のネットワークモデルを図10に示す.図10に示すように,入力層が1ユニットで入力データである気温のみ1つ,出力層は,1ユニットで,電力需要量の1つとし,各層は全結合とする.そして,中間層については,事前検討の中で最も精度が良好だった構成を採用し,層数を18,ユニット数を4とするネットワークを構築した.また,活性化関数および最適化関数は,PV発電量予測のネットワークモデルと同様で,ReLUとAdamを使用した.そして,予測対象時刻の予測値は,PV発電量予測機能と同様の流れで算出する.
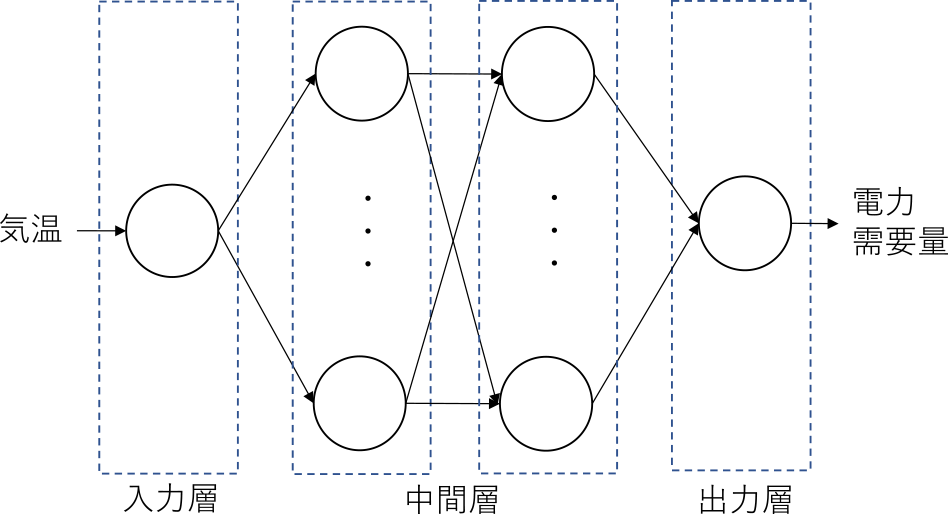
Fig. 10 Network model for power demand prediction.
4.5 EV運行計画作成機能
本節では,EV運行計画作成機能について説明する.本機能では,前節のPV発電量予測機能,電力需要予測機能によって算出された予測値を基に,EVの最適な運行計画を作成する.以降で本機能の詳細について説明する.
4.5.1 対象問題の定義
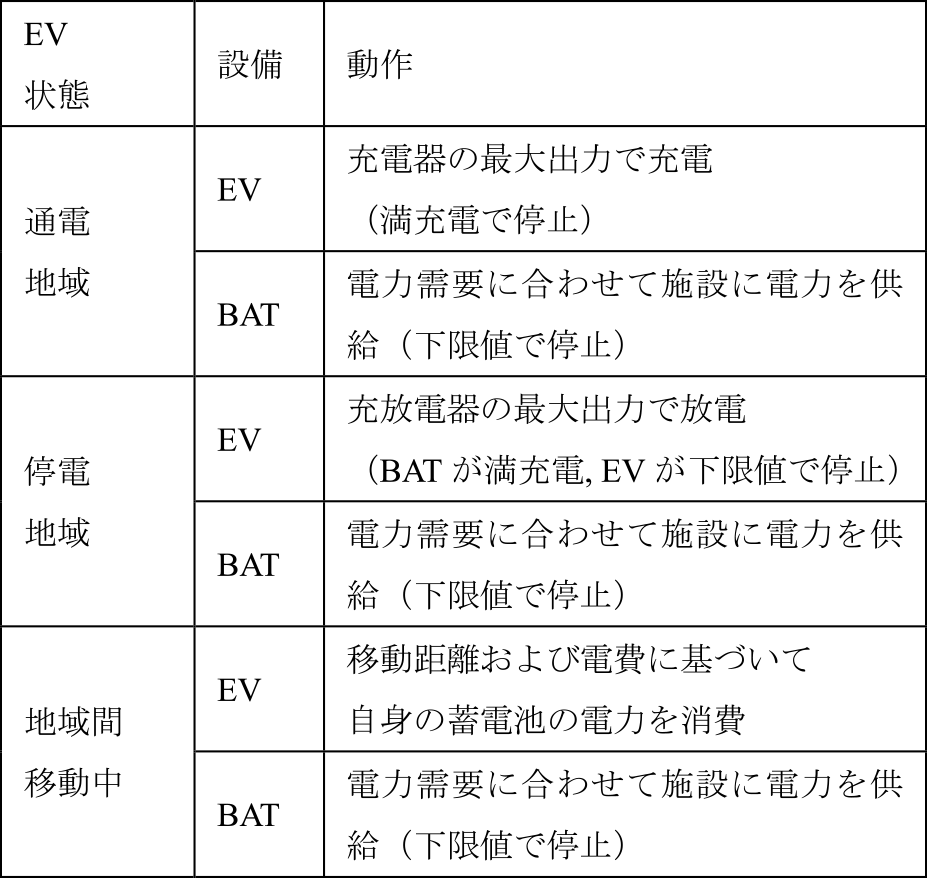
まず,最適化の対象問題について説明する.今回は,前章で説明した実証実験の内容を基に,最適化問題を定義する.最適化対象の目的は,停電時にEVが通電地域と停電地域を巡回して停電地域内の電力需要家に給電を行い,停電地域の電力需要家の停電継続時間を最小化することである.次に,前提条件としては,表3に示すように,停電地域の電力需要家には蓄電池が設定されており,巡回するEVの充電は通電地域で実施する.最後に,最適化内容は,EVの充電・走行・給電時間およびEVの巡回ルートを決定する.また,最適化計算によって算出される設備の状態として,EVの各時刻の移動状態(どこの地点にいるか),EVの各時刻の充放電電力量(蓄電量),BATの各時刻の充放電電力量(蓄電量)である.そして,各設備の動作としては,表4に示すように,EVの移動状態で異なるが,停電地域のBATは,施設の電力需要量に合わせて電力を供給する.
Table 3 Equipment conditions.
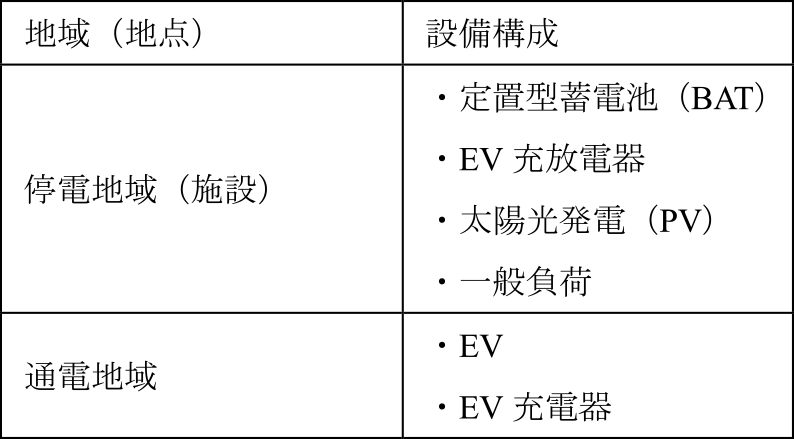
Table 4 Equipment operation.
4.5.2 状態計算の定義
次に,各設備の時刻間における状態を模擬するための状態計算について説明する.
(1) EVの状態計算
EVの状態としては,通電地域に停車中,停電地域に停車中,地点を移動後に通電・停電のどちらかに停車があり,その際の動作は,表4で定義したとおりである.まず,通電地域に停車中のEVの状態計算を式(1)に示す.\[\boldsymbol{EV}(\boldsymbol{t}) = \boldsymbol{EV}(\boldsymbol{t} - \boldsymbol{1}) + \boldsymbol{Eff} \cdot \boldsymbol{EV}_{\boldsymbol{chmax}}\](1)
$\boldsymbol{EV}$は各時刻のEVの蓄電池の蓄電量,$\boldsymbol{Eff}$は通電地域の充電器の充電効率,$\boldsymbol{EV}_{\boldsymbol{chmax}}$は通電地域の充電器の定格(最大)出力を表す.次に,停電地域に停車中のEVの状態計算を式(2)に示す.\[\boldsymbol{EV}(\boldsymbol{t}) = \boldsymbol{EV}(\boldsymbol{t} - \boldsymbol{1}) - \frac{\boldsymbol{1.0}}{\boldsymbol{EFF}_{\boldsymbol{eved}}} \cdot \boldsymbol{EV}_{\boldsymbol{Cmax}}\](2)
$\boldsymbol{EFF}_{\boldsymbol{evcd}}$は停電地域の充放電器の放電効率,$\boldsymbol{EV}_{\boldsymbol{Cmax}}$は停電地域の充放電器の放電電力の最大出力を表す.最後に,地点を移動後に通電・停電のどちらかに停車するかで計算式が異なる.停電地域から通電地域に移動した場合のEVの状態計算を式(3)に示す.\[ \begin{split} \boldsymbol{EV}(\boldsymbol{t}) = {}& \boldsymbol{EV}(\boldsymbol{t} - \boldsymbol{1}) - \boldsymbol{Dis} \cdot \boldsymbol{EV}_{\boldsymbol{ec}} \\ &{} + \boldsymbol{Eff} \cdot \boldsymbol{EV}_{\boldsymbol{chmax}} \cdot \boldsymbol{R} \end{split} \](3)
$\boldsymbol{Dis}$は地点間の移動距離,$\boldsymbol{EV}_{\boldsymbol{ec}}$はEVの電費,$\boldsymbol{R}$は移動に要した時間を差し引いた単位時間に対する比率を表す.通電地域から停電地域に移動した場合のEVの状態計算を式(4)に示す.\[ \begin{split} &\boldsymbol{EV}(\boldsymbol{t}) = \boldsymbol{EV}(\boldsymbol{t} - \boldsymbol{1}) \\ &\quad {} - \left(\boldsymbol{Dis} \cdot \boldsymbol{EV}_{\boldsymbol{ec}} + \frac{\boldsymbol{1.0}}{\boldsymbol{EFF}_{\boldsymbol{evcd}}} \cdot \boldsymbol{EV}_{\boldsymbol{Cmax}} \cdot \boldsymbol{R} \right) \end{split} \](4)
なお,EVの蓄電池の使用可能範囲は,式(5)のとおりであり,下限値($\boldsymbol{EV}_{\boldsymbol{minsoc}}$)以上,かつ,上限値($\boldsymbol{EV}_{\boldsymbol{maxsoc}}$)以下の範囲内でEVの充放電を行う.\[\boldsymbol{EV}_{\boldsymbol{minsoc}} \le \boldsymbol{EV}(\boldsymbol{t}) \le \boldsymbol{EV}_{\boldsymbol{maxsoc}}\](5)
(2) BATの状態計算
BATの状態変化は,EVの状態(通電地域に停車中,停電地域に停車中)によって異なるが,基本的には,表4で説明したとおり,BATは施設の電力需要量に応じて電力を放電する.EVが通電地域に停車中のBATの状態計算を式(6)に示す.\[ \begin{split} \boldsymbol{BAT}(\boldsymbol{t}) ={} & \boldsymbol{BAT}(\boldsymbol{t} - \boldsymbol{1}) \\ &{} - \frac{\boldsymbol{1.0}}{\boldsymbol{EFF}_{\boldsymbol{discharge}}} \cdot \boldsymbol{DEMAND}(\boldsymbol{t}) \end{split} \](6)
$\boldsymbol{BAT}$は各時刻の蓄電池の蓄電量,$\boldsymbol{EFF}_{\boldsymbol{discharge}}$はBATの放電効率,$\boldsymbol{DEMAND}$は各時刻の停電地域の施設の電力需要量(PVの発電量は負の電力需要量と考える)を表す.次に,EVが停電地域に停車中のBATの状態形式を式(7)に示す.\[ \begin{split} &\boldsymbol{BAT}(\boldsymbol{t}) \\ &= \boldsymbol{BAT}(\boldsymbol{t} - \boldsymbol{1}) - \frac{\boldsymbol{1.0}}{\boldsymbol{EFF}_{\boldsymbol{discharge}}} \cdot \boldsymbol{DEMAND}(\boldsymbol{t}) \\ &\quad {}+ \boldsymbol{EFF}_{\boldsymbol{charge}} \cdot \boldsymbol{EV}_{\boldsymbol{Cmax}} \cdot \boldsymbol{R} \end{split} \](7)
ただし,蓄電池から放電は式(8)の範囲内で行われ,範囲外になるEVの放電は0となる.また,蓄電池の使用可能範囲は,式(8)のとおりであり,下限値($\boldsymbol{BAT}_{\boldsymbol{minsoc}}$)以上,かつ,上限値($\boldsymbol{BAT}_{\boldsymbol{maxsoc}}$)以下で蓄電池の充放電を行い,下限値($\boldsymbol{BAT}_{\boldsymbol{minsoc}}$)未満になった場合は,蓄電池の充放電が停止し,施設が停電する.\[\boldsymbol{BAT}_{\boldsymbol{minsoc}} \le \boldsymbol{BAT}(\boldsymbol{t}) \le \boldsymbol{BAT}_{\boldsymbol{maxsoc}}\](8)
4.5.3 運行計画の最適化
今回の最適化対象としては,通電地域と停電地点を巡回するEVの各時刻の状態(どこの地点にいるか)である.ここで,EVの状態としては,通電地域,停電地域の2つである.そして,各時刻において,EVの状態を選択することで,今回の最適化問題の目的である「停電地域の電力需要家の停電継続時間」の最小化を達成する.つまり,組み合わせ最適化問題として定義することができる.そこで,本研究では,組み合わせ最適化の中でも代表的な手法である遺伝的アルゴリズム(GA)[23]を用いた最適化について説明する.遺伝的アルゴリズムを用いたEV運用計画最適化の処理フローを図11に示す.各項目については,以下で説明する.
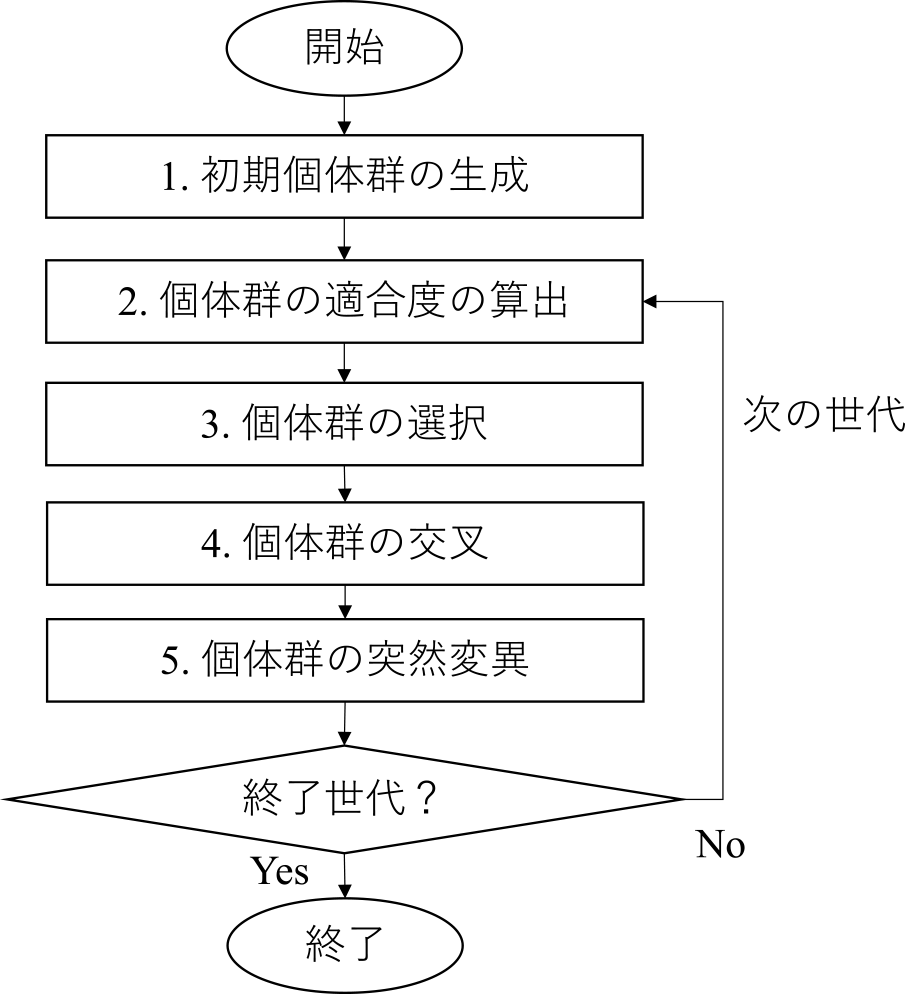
Fig. 11 EV operation plan optimization processing flow.
(1) 初期個体群の生成
個体としては,図12に示すように,各時刻のEVの状態で構成される.そして,初期個体群の生成では,図12に示すように,各時刻のEVの状態をランダム関数により発生し,N個の個体を生成する.

Fig. 12 Generation of initial population.
(2) 個体群の適合度の算出
個体群の適合度の算出では,EVの各時刻の状態および地点の各設備のパラメータを基に,各地点の設備の状態を算出し,各個体の適合度を算出する.なお,適合度の算出式は,以下のとおりである.\[ \begin{split} \boldsymbol{Fit} ={} & \boldsymbol{w1} \cdot \boldsymbol{cnt}_{\boldsymbol{batlower}} + \boldsymbol{w2} \cdot \boldsymbol{cnt}_{\boldsymbol{evlower}} \\ &{} + \boldsymbol{w3} \cdot \boldsymbol{cnt}_{\boldsymbol{evmove}} + \boldsymbol{w4} \cdot \boldsymbol{sum}_{\boldsymbol{evdischarge}} \end{split} \](9)
なお,$\boldsymbol{Fit}$は適合度,$\boldsymbol{cnt}_{\boldsymbol{batlower}}$は蓄電池容量が下限値以下になった回数,$\boldsymbol{cnt}_{\boldsymbol{evlower}}$は移動するEVの蓄電池容量が下限値以下になった回数,$\boldsymbol{cnt}_{\boldsymbol{evmove}}$は移動するEVが地点間を移動した回数,$\boldsymbol{sum}_{\boldsymbol{evdischarge}}$は停電地域でのEVの放電電力量の総和,w1からw4は各重みを表す.ここで,$\boldsymbol{cnt}_{\boldsymbol{batlower}}$と$\boldsymbol{cnt}_{\boldsymbol{evlower}}$は,制約条件であり,$\boldsymbol{cnt}_{\boldsymbol{evmove}}$と$\boldsymbol{sum}_{\boldsymbol{evdischarge}}$は,ペナルティ項であり,制約条件を必ず満たしつつ,ペナルティ項が最小となるような解を探索する.
(3) 個体群の選択
個体群の選択では,算出した各個体の適合度を基に,次世代に残す個体を選択する.個体群の選択方法としては,今回はエリート選択による選択を行う.
(4) 個体群の交叉
個体群の交叉では,個体群の選択にて選択した個体群において交叉を実施して,次世代に残す個体を生成する.なお,今回は,個体群の選択にて選択した個体(適合度の高いから個体から順に選択)において,順に組みを作り,一点交叉にて個体を生成する.また,最も適合度の高い個体とその次に適合度の高い個体は必ずそのままの状態で次世代に残すこととした.
(5) 個体群の突然変異
個体群の突然変異では,個体群の交叉によって生成された各個体に対して,一定確率で個体の状態を変更する.なお,突然変異においては,最も適合度の高い個体は突然変異することなく,そのままの状態で次世代に残すこととした.
5. システムの評価実験
本章では,構築したシステムの有効性について確認するため,実データを用いた評価実験を行う.本評価実験では,PV発電量予測機能および電力需要予測機能の精度評価,PV発電量予測機能および電力需要予測機能によって算出した予測値を用いたEV運用計画機能による運用計画について確認する.
5.1 PV発電量予測機能の精度評価
本節では,PV発電量予測機能によるPV発電量予測の精度評価を行う.本実証実験で使用するPVスペックを表5に示す.
Table 5 PV spec.

5.1.1 使用データ
PV発電量予測に使用する気象データは気象庁が提供する気温,日照時間,降水量,積雪量を使用し,観測地点は白山麓キャンパスから最も近い「白山河内」とした.なお,学習モデルの構築のための学習データは2021年6月から2021年7月(ただし,予測対象日の6月18日から6月20日のデータは除く)を使用した.本来であれば,予測対象日の前日までのデータを学習データに使用して学習モデルを構築し,構築した学習モデルを用いて予測値を算出するのが普通である.しかし,今回,2021年度の設備構築の実施が完了して間もない時期に実証実験を実施したため,限られた期間でのデータ取得しかできず,PV発電量を予測するうえで,学習データの不足が懸念されたため,学習データの期間をこのような形にすることとした.
5.1.2 予測結果
PV発電量の予測結果として,平均絶対誤差と平均絶対誤差率を表6に示す.また,時間ごとの予測値と実績値を図13に示す.予測結果として,予測対象日の平均絶対誤差は,104.2 W,平均絶対誤差率は,2.83%という結果となった.また,図13に示すように,誤差が大きな時間があるが,平均絶対誤差や平均絶対誤差率が示すように,全体的におおむね良好な精度で予測することができていると考える.
Table 6 MAE & MAPE for PV power generation prediction.

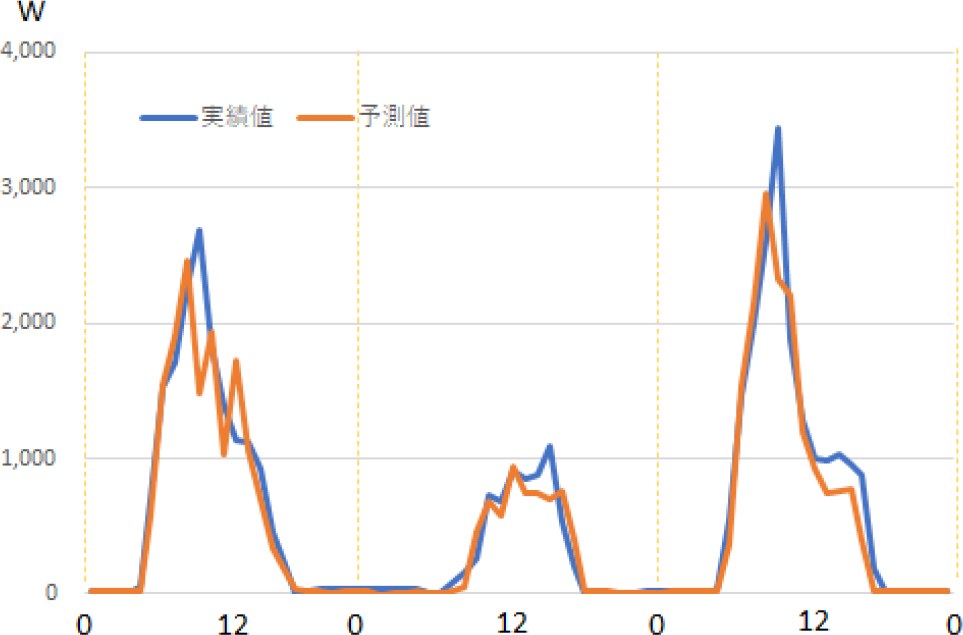
Fig. 13 PV power generation predicted value and actual.
5.2 電力需要予測機能の精度評価
本節では,電力需要予測機能による電力需要予測の精度評価を行う.
5.2.1 使用データ
電力需要予測に使用する気象データは気象庁が提供する気温を使用し,観測地点はPV発電量予測機能と同様の「白山河内」とした.なお,学習モデルの構築のための学習データは2021年6月から2021年7月(ただし,予測対象日の6月18日から6月20日のデータは除く)を使用した.データの期間の設定理由はPV発電量予測機能と同じである.
5.2.2 予測結果
電力需要の予測結果として,平均絶対誤差および平均絶対誤差率を表7に示す.また,時間ごとの予測値と実績値を図14に示す.予測対象日の平均絶対誤差は,51.3 W,平均絶対誤差率は,7.56%という結果となった.
Table 7 MAE & MAPE for power demand prediction.

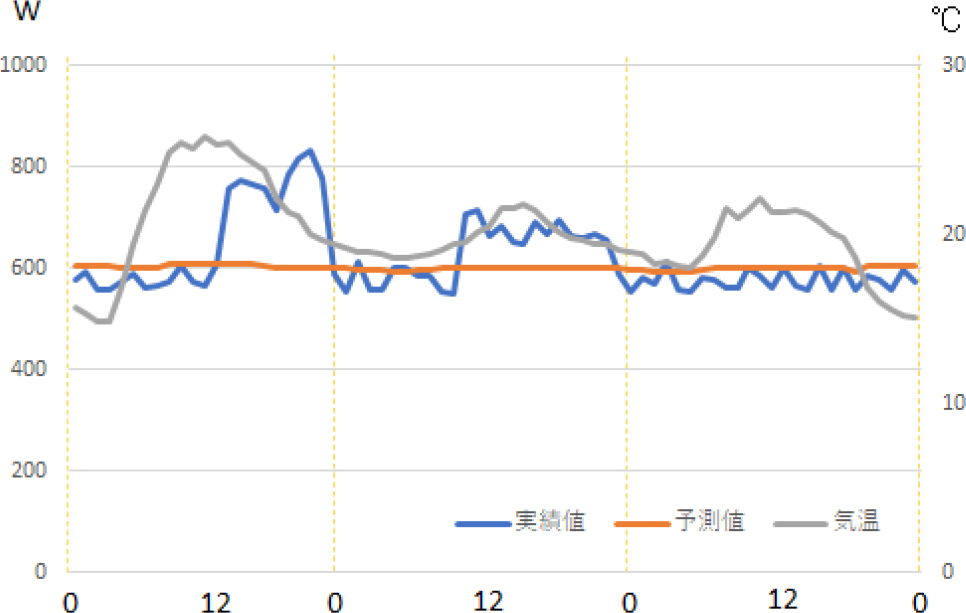
Fig. 14 Power demand predicted value / actual value and temperature.
また,図14に示すように,実績値に比べて,予測値は約600 Wあたりで一定に値になっている.その理由としては,予測対象の3日間でもそうであるが,1日目と2日目の昼以降で700 Wから800 Wまで電力需要が上がっているが,3日目は,そのような現象は起こっていない.学習に使用したデータを確認しても3日目のような日が多く,1日目や2日目のように電力需要が上がる日はまれであり,また,気温などの気象データの影響で上がっているというわけではなかった.そのため,電力需要の上がる傾向が今回のネットワークモデルでは学習することができず,このような結果になったと考える.ただし,3日間通して,予測誤差率は約8%とそれほど大きくなく,PV発電量と同様で,全体的におおむね良好な精度で予測することができると考える.
5.3 EV運用計画機能の評価
本節では,EV運用計画機能によるEVの運用計画の有効性を確認するために,PV発電量予測機能および電力需要予測機能による予測値および2021年度の実証実験の内容を使用した評価実験を行う.
5.3.1 設備情報とパラメータ
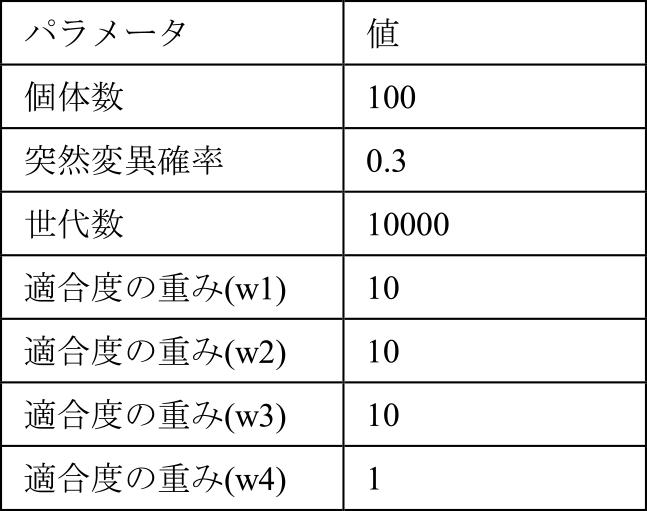
EVや蓄電池などの各設備の容量は実証実験で使用する設備のカタログ値を使用した.各設備や各地点の情報を表8から表11に示す.また,本機能で使用するGAの各パラメータを表12に示す.なお,GAの各パラメータについては,試行錯誤を繰り返し行い,解の収束性の観点で最も良かった値である.
Table 8 EV equipment information.
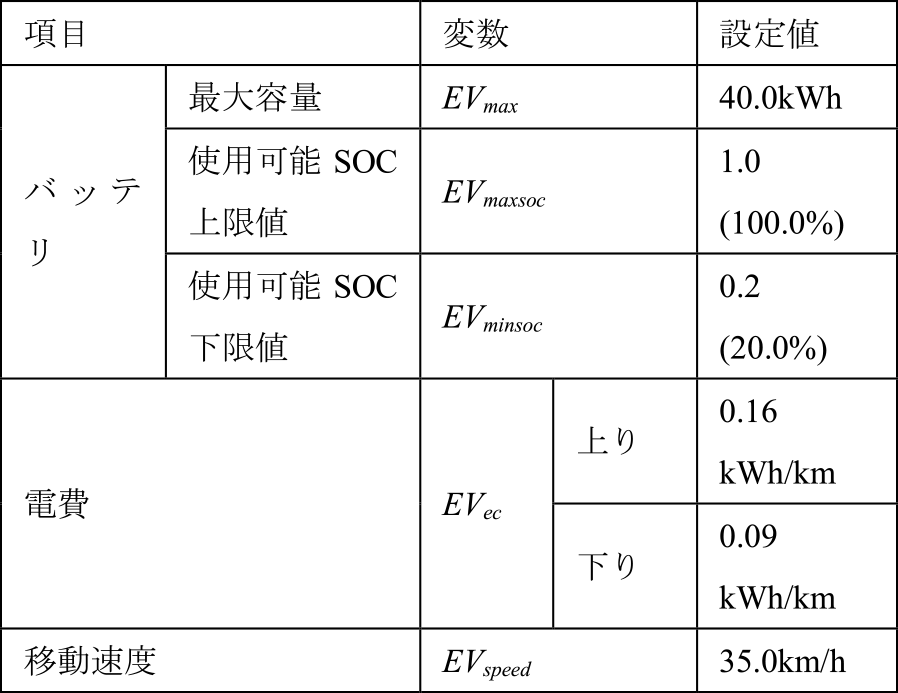
Table 9 Equipment information in power outage areas.
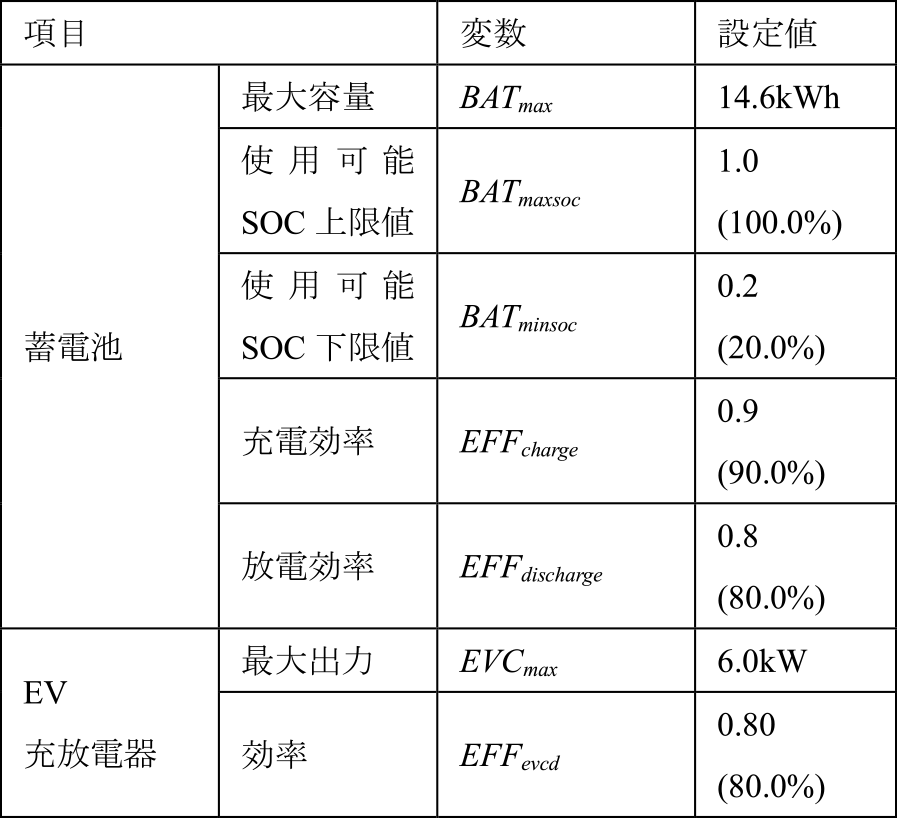
Table 10 Equipment information in the energized area.
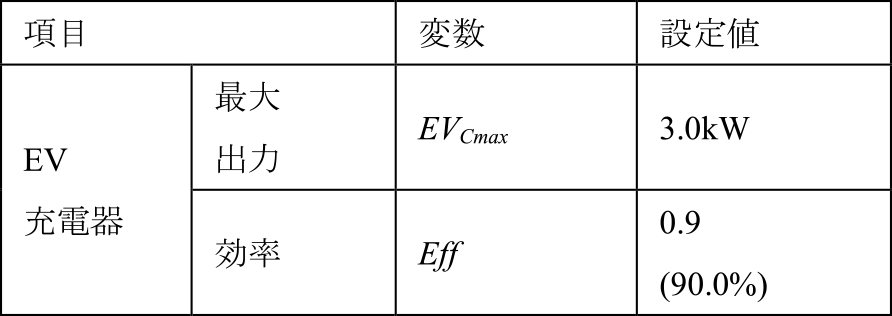
Table 11 Information between energization and power outage.
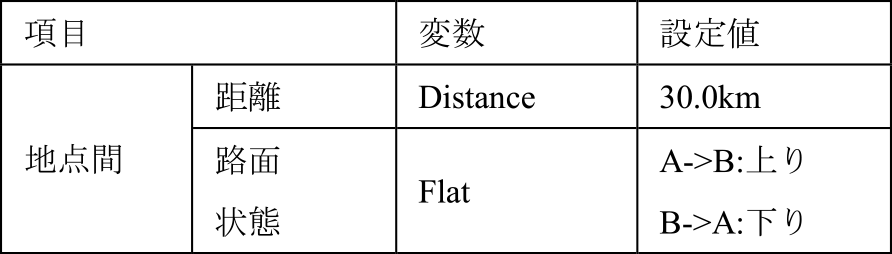
Table 12 GA parameters.
5.3.2 実験結果
ここでは,GAを用いたEVの運用計画の最適化結果について説明する.最適化結果として,EVの運用計画の最適化結果を表13と図15に,蓄電池の運用計画の最適化結果を図16に示す.具体的な運用内容としては,表13に示すように,1日目と3日目の運行計画はなく,2日目のみ停電地域に移動し,電力を供給するという計画結果になった.そして,図15および図16に示すように,EVおよび蓄電池ともに使用可能SOCの下限値を下回ることなく3日間運用を行うことができる計画を立案できている.
Table 13 EV operation plan optimization result.

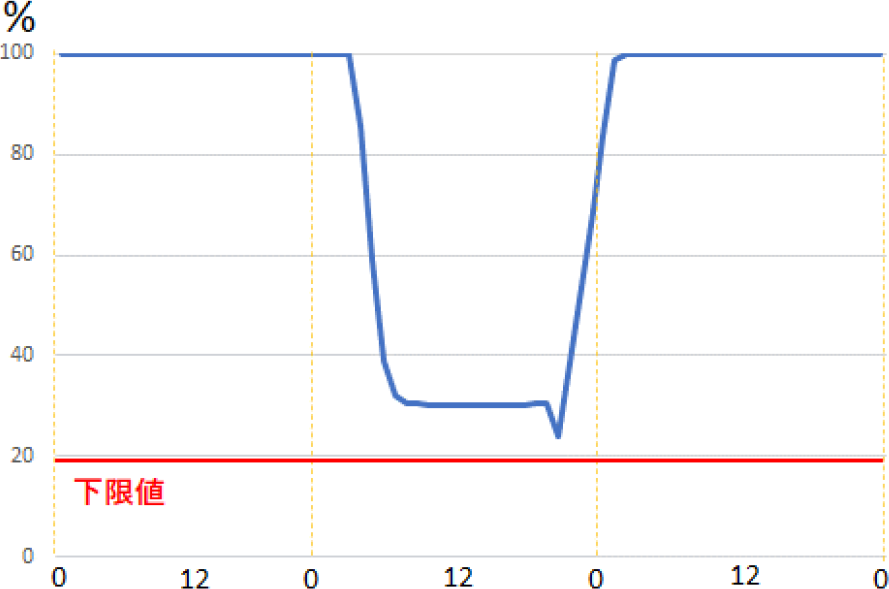
Fig. 15 EV operation plan optimization results.
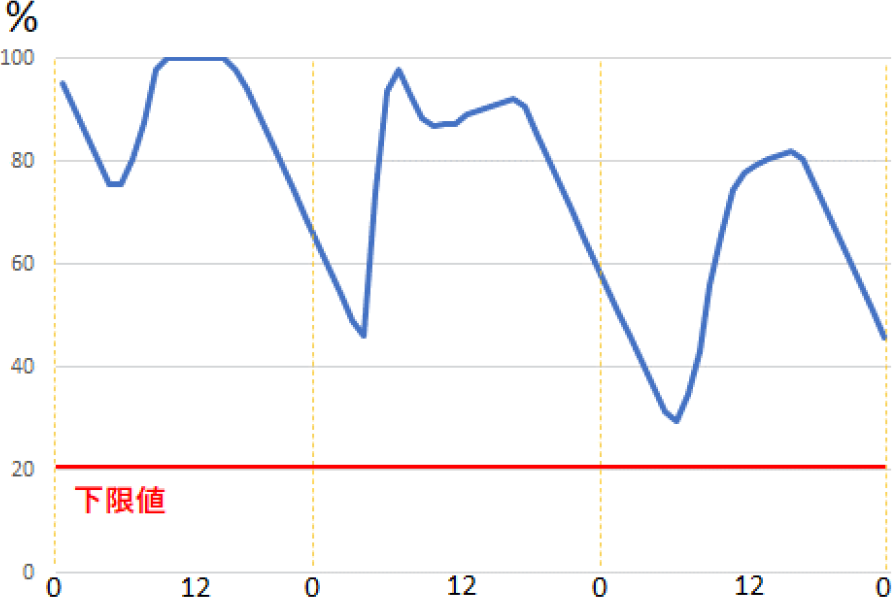
Fig. 16 Battery operation plan optimization results.
ただし,3.2節の結果では,1日目も停電地域にEVを移動させて,電力供給を行ったが,最適化結果のように,1日目は停電地域への移動が不要ということが分かる.その一方で,2日目の通電地域への出発は,2:00と夜中の出発計画が立っている.つまり,1日目と3日目はPVの発電量が多いため,PVと停電地域のBATのみで電力供給が可能であるため,EVから電力供給は不要であるが,2日目は,天候が雨でPVの発電量が少なくなるため,早めにEVを停電地域に移動させて,BATに電力を供給することで,その日の停電地域の電力供給を可能にしたといえる.また,3.2節の実証実験と今回の最適化結果が異なるもう1つの理由としては,3.2節の実証実験では夜や深夜の作業を行わない基で計画を立てているのに対して,本システムでは,そのような制約は設けることなく運用計画を立てるようにしている.そのため,夜や深夜の作業を可能にすれば,今回の結果と同様の結果になるのではないかと考える.これらの結果から本システムにおけるGAを用いたEV運用計画の最適化がEV仮想配電向けシステムにおいて有用であるといえる.
また,今回の仮想配電線におけるEVの運用計画の最適化手法としてGAの有効性を確認するために,世代ごとの適合度の推移について確認し,解の収束性について確認する.
図17に示すように,制約違反(蓄電池容量が下限値以下になった回数,移動するEVの蓄電池容量が下限値以下になった回数)が0になるまで,数世代以内で制約違反がなくなり,そのあとはペナルティ(移動するEVが地点間を移動した回数,停電地域でのEVの放電電力量の総和)を減らす改善が行われ,5000世代程度でペナルティも収束している.そのため,遺伝的アルゴリズムが今回の仮想配電線におけるEVの運用計画の最適化手法として有効であると言える.
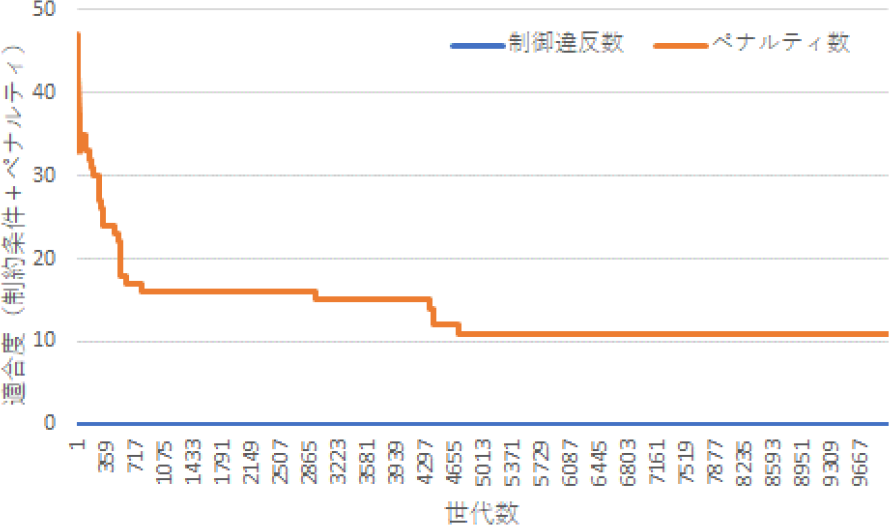
Fig. 17 Changes in fitness for each generation.
一方で,EVの運用計画の作成に使用したGAにおける個体群の選択にエリート選択を使用した.今回は,運用計画の対象のEVが1台,対象地域が2地点と問題の規模が小さかったため,局所解に陥ることなく解を算出することができた.しかし,対象のEVが台数や対象地域の地点数が増えると,問題の規模が大きくなり,エリート選択では局所解に陥る可能性がある.そのため,今後,設備の数や地点の数を増加させていく中で,エリート選択以外の選択手法や独自の選択手法などについて検討していく.
5.3.3 予測誤差による影響評価
ここでは,予測誤差による影響評価として,PV発電量予測機能および電力需要予測機能によって算出した予測値を用いたEVの運用計画について実績値を用いたシミュレーションによりどのような影響があるか確認する.なお,シミュレーションは,4.5.2項で説明した状態計算式を用いてPV発電量と電力需要量の実績値およびEVの運行計画(各時刻のEVの状態(どの地点にいるか))によって実施した.シミュレーション結果を図18と図19に示す.なお,図18と図19の点線は,図15と図16のEVおよび蓄電池の運用計画を表す.図18およぶ図19に示すように,予測誤差によって3日目のBATの使用可能SOCの下限値に近いところまで低下しているが,下限値以下になることなく電力供給を3日間継続できている.その結果から今回の予測精度でも問題なく本システムを実現可能であり,本システムが有効であるといえる.
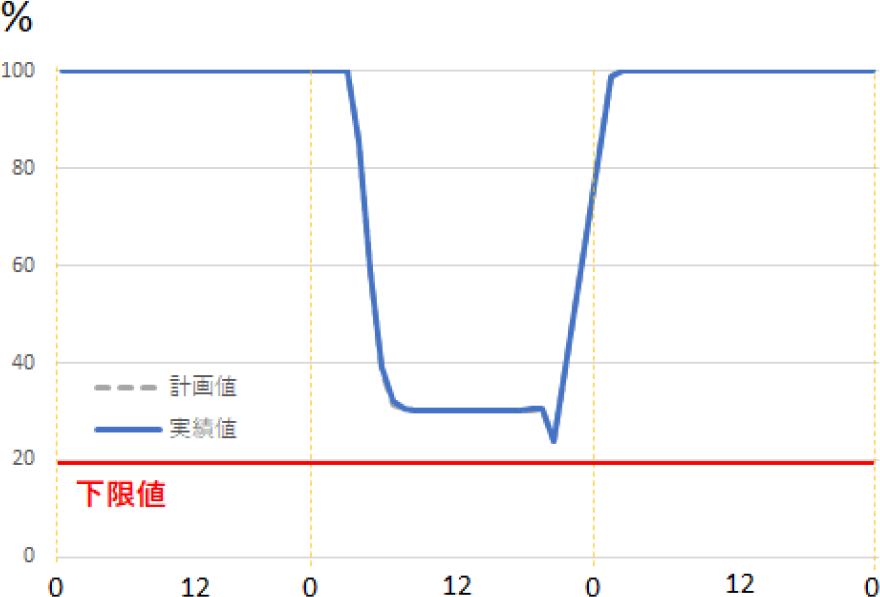
Fig. 18 EV simulation results using actual values.
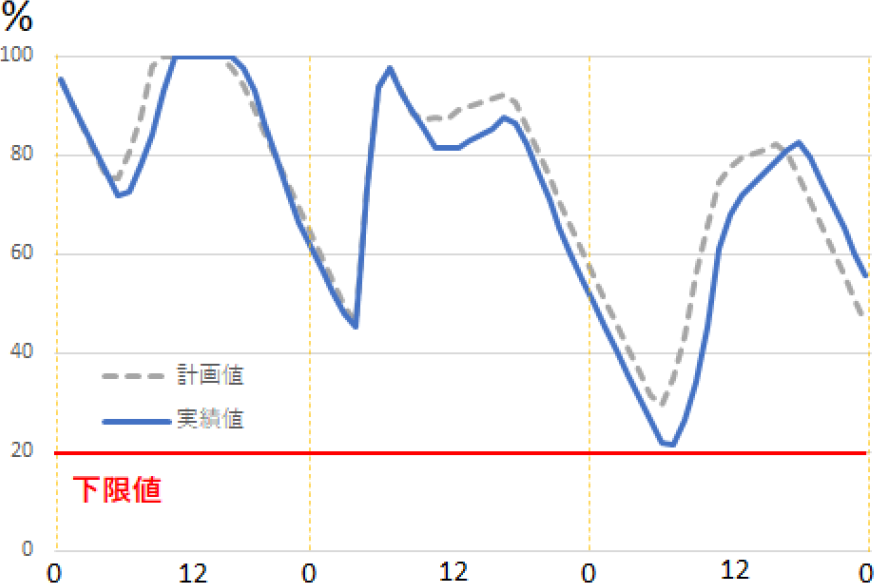
Fig. 19 Battery simulation results using actual values.
6. おわりに
本稿では,Society 5.0の実現に向けて,その根幹となる電力・エネルギーシステムにおける電力ネットワークのレジリエンス強化を目的として,金沢工業大学にて実施中の「再生可能エネルギーベストミックスのコミュニティモデル実証実験設備」を活用して実施したEV仮想配電線の実証実験の結果について報告した.これは,商用系統停電時に,需要家であるコテージへ,EVを用いて電力輸送し,EVを仮想的に配電線として使うEV仮想配電線により,需要家の自立運転長期継続可能性を検証するものである.
また,EV仮想配電線の実現のために必要となるシステムについて検討し,AIを活用して当日の電力状況に応じた最適なEVの運用を実現するEV仮想配電線向けシステムの構築を行った.構築したシステムは,深層学習を用いて実証実験当日のPV発電量や電力需要量を予測する機能や予測値からGAを用いてEVの運用計画を最適化する機能から構成され,構築したシステムを用いて各機能の評価実験を行い,その有効性を確認した.
今後は,構築した本システムにより作成された運用計画を用いて実証実験を行い,本システムの有効性を確認する予定である.また,対象設備や対象地点の数を増加させていく中で,EV運用計画作成機能の性能向上について検討する予定である.具体的には,EV運用計画の最適化に使用しているGAの選択手法についての検討がある.さらに,本システムでは,PV発電量および電力需要量の予測値を基に,最適化されたEVの運用計画を策定している.しかし,予測は外れることも多く,その影響で施設が停電することも十分に考えられる.そのため,最適化の際に予測における不確実性を考慮した最適化手法について検討する予定である.
参考文献
- [1] 谷口忠大:自律分散型スマートグリッドにおける適応的電力融通手法,人工知能学会論文誌,Vol.28, No.1, pp 77–87 (2013).
- [2] Sogabe, T., Ichikawa, H., Sakamoto, K., Yamaguchi, K., Sogabe, M., Sato, T. and Suwa, Y.: Optimization of decentralized renewable energy system by weather forecasting and deep machine learning techniques, Proceedings of 2016 IEEE Innovative Smart Grid Technologies – Asia, pp.1014–1018 (2016).
- [3] 令和2年度エネルギーに関する年次報告(エネルギー白書2021),〈https://www.enecho.meti.go.jp/about/whitepaper/2021/pdf/〉(参照2021-08-12).
- [4] 電力レジリンスワーキンググループ中間取りまとめ,〈https://www.meti.go.jp/shingikai/enecho/denryoku_gas/denryoku_gas/resilience_wg/pdf/20181127_01_00.pdf〉(参照2021-08-12).
- [5] 電力レジリエンスワーキンググループー台風15号の停電復旧等にかかる検証結果とりまとめ,〈https://www.meti.go.jp/shingikai/enecho/denryoku_gas/denryoku_gas/resilience_wg/20200110_report.html〉(参照2021-08-12).
- [6] 太田 豊:電力システムにおける電気自動車の活用,電気学会論文誌B,Vol.138, No.9, pp.753–756 (2018).
- [7] 台風15号での活動を踏まえた電動車の活用促進,〈http://www.cev-pc.or.jp/xev_kyougikai/xev_pdf/xev_kyougikai_wg01-1_tepco.pdf〉(参照2021-08-12).
- [8] Izui, Y., Natsuume, D., Saito, M., Tabata, H. and Fujimoto, M.: DC Microgrid Experimental System at KIT Hakusan-roku Campus for Regional Areas, The 3rd IEEE ICDCM (International Conference on DC Microgrids), 1-B-4 (2019).
- [9] 田畑浩数,夏梅大輔,松井康浩,藤本雅則,齋藤正史,泉井良夫:熱と電気によるエネルギー地産地消実証実験の取り組み,クリーンエネルギー,Vol.28, No.7, pp.46–58 (2019).
- [10] 泉井良夫,西田義人,馬渕洋平,夏梅大輔,田畑浩数,浜下祐輔,橋本茂男,杉本仁志:再生可能エネルギーベストミックスのコミュニティモデル実証実験:電気自動車の仮想配電線への利活用,第83回情報システム研究会,IS-20-034, pp.1–6 (2020).
- [11] Nishita, Y., Izui, Y., Mabuchi, Y., Natsuume, D., Tabata, H. and Miyamoto, T.: Demonstration Experiments and Optimization of Operation Plans for Utilization of EV for Virtual Distribution Line. ICEE2021, pp.454–459 (2021).
- [12] 防災基本計画,〈http://www.bousai.go.jp/taisaku/keikaku/pdf/kihon_basic_plan180629.pdf〉(参照2021-08-12).
- [13] 過去の気象データ検索,〈http://www.data.jma.go.jp/obd/stats/etrn/index.php〉(参照2021-08-12).
- [14] OpenWeatherMap, 〈https://openweathermap.org/〉(参照2021-08-12).
- [15] 電力広域的運営推進機関:30分電力量・確定使用量・発電30分電力量(電気事業者間のシステム連携に関する規格等),〈https://www.occto.or.jp/system/gijutsu/kouri_ippan_renkei.html〉(参照2022-01-28).
- [16] 西田義人,泉井良夫,鈴木啓太,岩井良輔,夏梅大輔,田畑浩数:再生可能エネルギーベストミックスのコミュティモデル実証実験:降雪地域における太陽光発電予測について,第83回情報システム研究会,IS-20-036, pp.13–18 (2020).
- [17] Nishita, Y., Izui, Y., Suzuki, K., Natsuume, D. and Tabata, H.: Examination of Solar Power Generation Prediction Method in Snowfall Area Using Machine Learning, ICEE2021, pp.460–465 (2021).
- [18] 人工知能学会:深層学習,近代科学社(2015).
- [19] 小松秀徳,所 健一,篠原田靖志,井上俊雄,野見山史敏,井手敏郎:3時間先電力需要予測手法,オペレーション・リサーチ,Vol.56, No.9, pp.530–534 (2011).
- [20] 川野裕希,山田敏志,阿倍博信,中島宏一:スモールデータアプローチによるオフィスビルの電力需要予測方式,情報処理学会論文誌コンシューマ・デバイス&システム,Vol.4, No.2, pp.1–9 (2014).
- [21] 河嵜光毅,吉川大弘,古橋 武:RBMを用いた電力需要予測に関する検討,第15回情報科学技術フォーラム(FIT),Vol.2, pp.181–182 (2016).
- [22] 水野裕志,田中義人,黒川不二雄,松井信正:Deep Learningによる院内負荷予測モデルを活用した異常時における院内分散電源のエネルギーマネジメント,電気学会論文誌C,Vol.140, No.2, pp.156–163 (2020).
- [23] 北野宏明:遺伝的アルゴリズム.産業図書(1993).

西田 義人(正会員)nishita@neptune.kanazawa-it.ac.jp
2010年3月関西大学大学院総合情報学研究科博士課程後期課程修了.博士(情報学).同年4月三菱電機株式会社入社.主に,電力システムにおける予測・計画・運用に関する研究開発に従事.2020年4月金沢工業大学基礎教育部基礎実技教育課程講師.現在,エネルギーマネジメント,機械学習,最適制御,画像処理に関する研究に従事.電気学会,IEEEの会員.

泉井 良夫(シニア会員)
1986年3月東京大学大学院工学系研究科博士課程修了.同年4月三菱電機株式会社入社.主に,電力システムにおける計画・運用ならびに最適化,スマートグリッド・スマートコミュニティに関する研究開発に従事.2018年4月金沢工業大学工学部電気電子工学科教授.現在,エネルギーマネージメントシステムの実証実験研究に従事.電気学会,IEEE等の会員.

馬渕 洋平(非会員)
2019年3月金沢工業大学工学部電気電子工学科卒業.現在,同大学工学研究科電気電子工学専攻博士課程前期課程在学中.電気自動車を活用したエネルギーマネージメントシステムに関する研究に従事.

夏梅 大輔(非会員)
1999年3月金沢工業大学大学院工学研究科修士課程電気電子工学科修了.同年4月三菱電機株式会社入社.主に発電システムの設計・開発に従事.2003年8月(株)成宏電機入社,現在,FA・産業用装置の制御設計,直流マイクログリッドシステムを含めエネルギーシステム開発設計に従事.2012年代表取締役社長.金沢工業大学地方創生研究所主任研究員.電気学会の会員.

田畑 浩数(正会員)
2018年3月金沢工業大学工学研究科ビジネスアーキテクト専攻修士課程修了.1984年4月学校法人金沢工業大学入職.主に,環境・施設マネジメントに従事.2016年4月より,金沢工業大学地方創生研究所にて,エネルギーの地産地消実現に向けた直流マイクログリッドの研究に従事.現在,実証研究の社会実装化の取り組みに従事.
再受付日 2021年11月25日
採録日 2022年1月13日
会員登録・お問い合わせはこちら
会員種別ごとに入会方法やサービスが異なりますので、該当する会員項目を参照してください。