スマートホスピタル構想における汎用型多目的ロボットの活用
1.超スマート社会におけるスマートホスピタルの役割
2010年に「ライフ・イノベーションによる健康大国戦略」が掲げられ医療・ヘルスケア分野が国家戦略として成長分野として期待されることで,この領域に注力する企業が増加した.医療機器関連企業や製薬企業はもちろんであるが,これまで医療と関連が少なかった企業もこれまでのノウハウや保有する技術を活かした医療・ヘルスケア領域への新規事業開拓や,従業員満足(ES,Employee Satisfaction)に直結する健康経営を目指した研究開発や投資を加速してきた.たとえば保険会社においては顧客データから蓄積されたリスク分析のノウハウや,電子機器企業においては生体情報センシング技術などを活用し,従業員の理想的なワークライフバランスに向けた運動・食事・生活習慣に対するエビデンスに基づいた能動的なモニタリングや行動変容を促す仕組みづくりや個々のリスクに基づいた健診プログラムの提供などを企業が積極的に実施するようになってきた.特に多忙極まりなく,担い手の不足が叫ばれる医療従事者を補助する技術の開発・導入は喫緊の需要であり,これまでの医療関連企業では知見が少ない,医療従事者の業務のロボットによる補助や代替は,これまで物流や工場内オートメーション等で取り組んでいる企業が多く,ノウハウが蓄積されてきており,先述した健康大国戦略でも重視されていること,また市場としてこれから少子高齢化が進む途上国などでの需要増大を見込めることもあり,この10年で非常に進歩してきた.
さらに2016年度に閣議決定された「第5期科学技術基本計画」の中で新しい価値やサービスを持続的に創出するコンセプトとして「超スマート社会(Society 5.0)」が新たに提唱されることで,これまで各々単独で開発検証されてきたロボット技術,Internet of Things(IoT)を始めとした情報通信技術,ものづくり技術を医療健康分野に活用した製品やサービスが連携し新しい価値を医療やヘルスケアの現場に提供することのポテンシャルが気づかれ始めた.ちょうどこの頃から,これまで社会課題として問題化されつつも解決策が見い出せなかった急速に進行する少子高齢化を背景とした医療過疎(医療の担い手・医療従事者の相対的不足)や医療現場のオーバーワーク問題に対する解決策としてスマート社会における新しい病院のかたちとしてスマートホスピタルが注目されてきつつある.Society 5.0で実現されようとしているスマート社会は,ヒトやモノが時間や場所などの制約を超えつながりあい,これまでの社会では解決が困難であった課題を解決するとともに,新しい産業を創出し,ヒトが活躍できる新たな領域を見出すことで,希望の持てる社会,世代を超えて互いに尊重し合あえる社会とされ,一人ひとりが快適で活躍できる社会を創りあげることを目標としている.そのような目標の中で,あらゆる産業においてIoT(Internet of Things),AI(Artificial Intelligence:人工知能),ロボティクス,拡張現実技術(Cross Reality(xR))等の先進情報技術を活用したイノベーションが求められてきた.
また,2019年より世界中を大きく揺るがしている新型コロナウイルス感染症(COVID-19)により,さらにスマート技術の社会実装が早められることが求められることとなった.医療現場では,後期高齢者の増加や人手不足に加え,新たな感染症の拡大によってより一層厳しい状況下にある.
日本が目指すべき未来社会の姿としてSociety 5.0が提唱されてから現在まで,さまざまな分野の企業がデジタルトランスフォーメーションを推進し,IoTやAI,ロボティクス技術の活用を模索してきたが,医療分野では一部の病院でしか,先進的な試みが進んでおらず,デジタル技術を活用した医療現場における業務効率化,医療安全の向上が急務となっている.労働集約型産業と言える病院では,院内物流における搬送,書類作成や医療記録を打ち込む事務作業といった医療行ため以外の業務が多く存在する.近い将来,人手不足が深刻化する中,働き方改革やタスクシフティングを行い,業務効率化を進めていくには,先進的ICTを活用したスマート化が必要となる.当院では,2018年よりスマートホスピタル構想を宣言し,これまでもさまざまな企業や自治体と連携しながら産学官によるスマート技術の開発や技術に関する実証実験を進めてきた.それらの取組みの中から本稿では人を支援するロボットを扱った実証実験とロボットを導入する上での課題等について紹介する(図1).

2.病院内業務効率化を目指したロボット導入
2.1 システム概要
2.1.1 汎用型多目的ロボットtemi
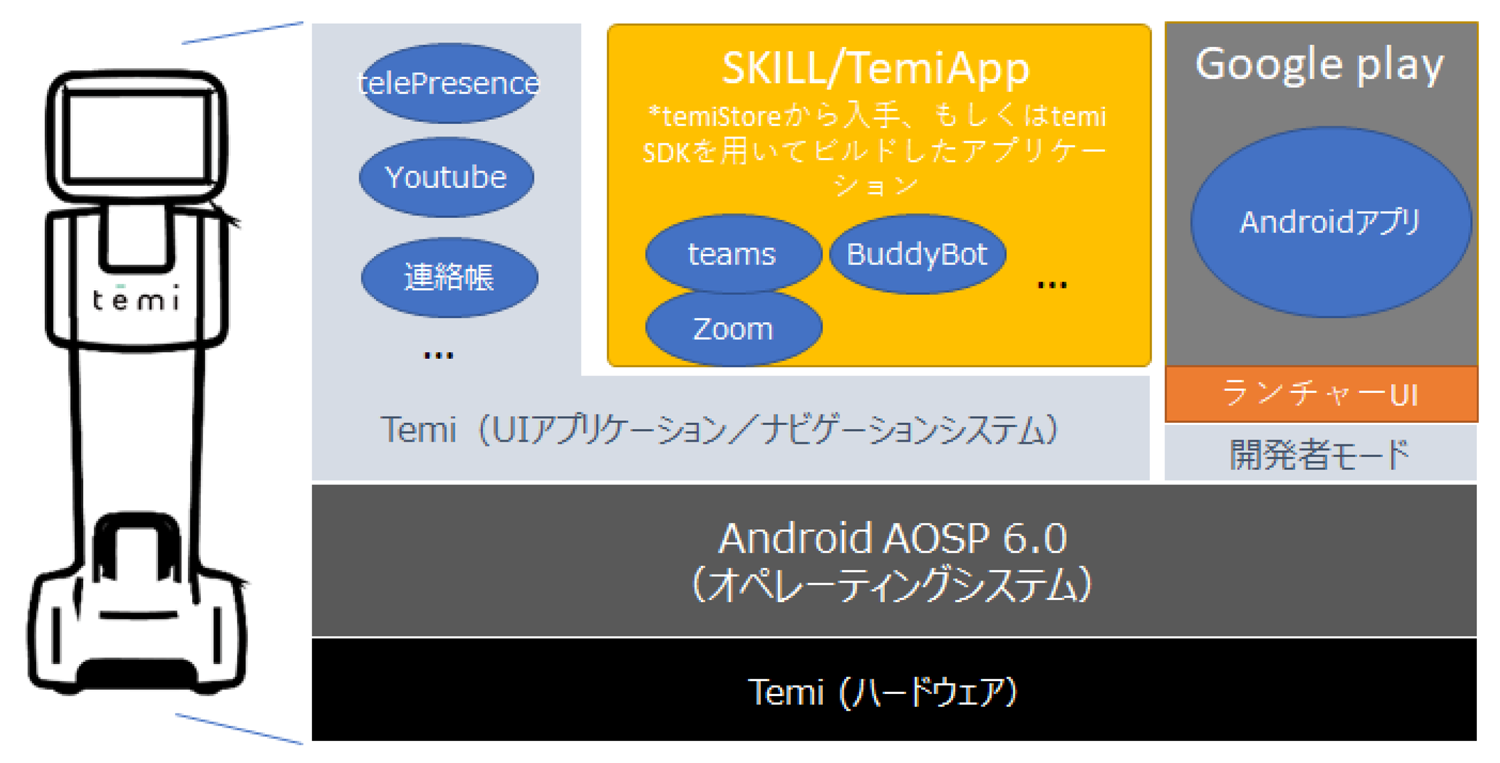
temiは,イスラエルのロボットメーカtemiが開発したサービスロボットである[1].temiが自社開発した特許技術「ROBOXナビゲーションシステム」は,360度Light Detection and Ranging (LiDAR)とSimultaneous Localization and Mapping (SLAM)アルゴリズムを搭載している.LiDARは,レーザ光を使ったセンサの一種である.対象物までの距離や位置や形状まで正確に検知できることが特徴である.SLAMは,位置特定と地図作成を同時に行う技術である.これらの技術により,数センチレベルのマッピングを行うことができ,自律走行,障害物回避,ナビゲーションができるほか,自分で充電ステーションに戻る機能も備えている.本ロボットは元来家庭用のパーソナルロボットとして開発されたものであり,その用途を特定の機能に限定していない.そのため,temiが有するハードウェア機構とセンサ等でこと足りる範囲においては,1台でさまざまな機能をソフトウェアとして実装し実現することができる.この点が,あらかじめ限定された目的をを達成するために開発された産業用ロボット等(1台数百万円以上のものが多い)と最も大きく異なる点である.
temiをソフトウェア制御していく場合は,オープンな技術となっているSDK[2]を組み合わせながら,アプリケーションを構築していく.開発言語は,java言語あるいはkotlin言語等である.Androidが有するWebviewを駆使して,挙動の大半をクラウド側で記述規定する.この場合,Android/temi上でのアプリ開発は不要となるものの,Server sideでプログラムを記述するため,ソフトウェア開発者の支援が必要となる.
人間の判断を介在する以上,人間からの入力が必要となる.temiに対して人間が直接的に入力可能な方法は,タッチパネル操作,音声入力,カメラ経由での映像入力等となる.それ以外の方法としては,デジタル機器やクラウドを介した入力となる(図2).
2.1.2 プラットフォームBuddyBot
より高度な業務をロボットで代替するためには,オープンな仕様でIoT機器やクラウドと連携する仕組みが必要である.また,temiを病院業務に活用するために,各病棟のレイアウトや動線に応じて柔軟にソフトウェアを改変していく必要がある.以上を実現するために構築されたプラットフォームがBuddyBotである[3].BuddyBotはtemi SDKとAndroid SDKで実現可能な内容のみならず,IoT機器やクラウドと連携するための各種機能をブロックという形で用意し[4],業務活用を検討する利用者自身がブロックを組み合わせることで,柔軟にロボットの動きを規定し,改変できる.
BuddyBotは,temi上で稼働するBuddyBotクライアントと,サーバ上で稼働するBuddyBotサーバで構成される(図3).
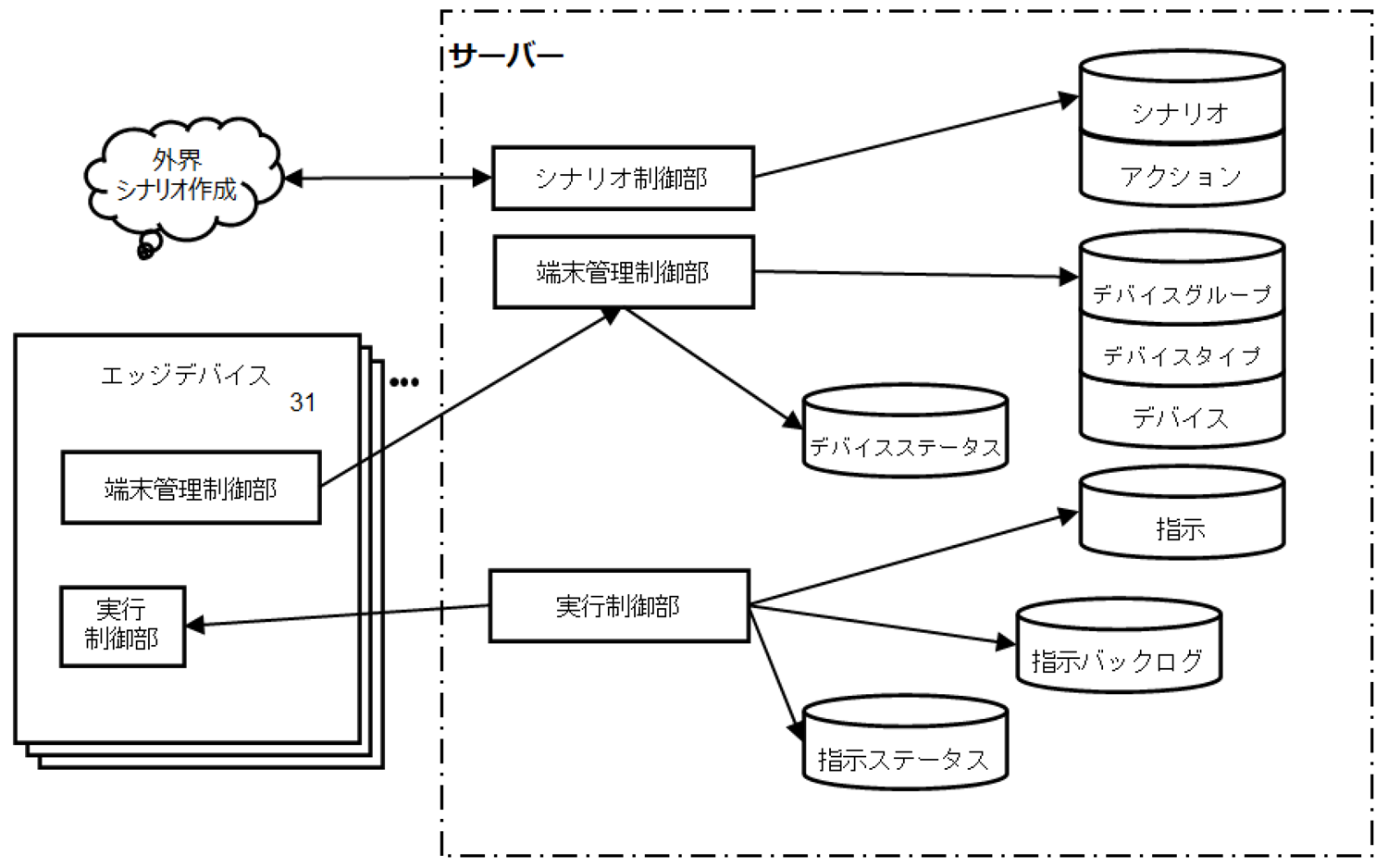
図4に例示するように,ブロックをブラウザで組み上げると,BuddyBotサーバにシナリオとして保存される.当該シナリオがランチャー等によって実行された場合,稼働可能なBuddyBotクライアント・temiがBuddyBotサーバによってアサインされる.以降,アサインされたBuddyBotクライアント・temiが当該シナリオを取得し,逐次実行していく.シナリオの実行記録はBuddyBotクライアント・temi内に記録され,シナリオの実行終了と同時にBuddyBotサーバに送付され,最終的なシナリオ完了となる.このシナリオ開始・終了は,Web APIを介して行われる.
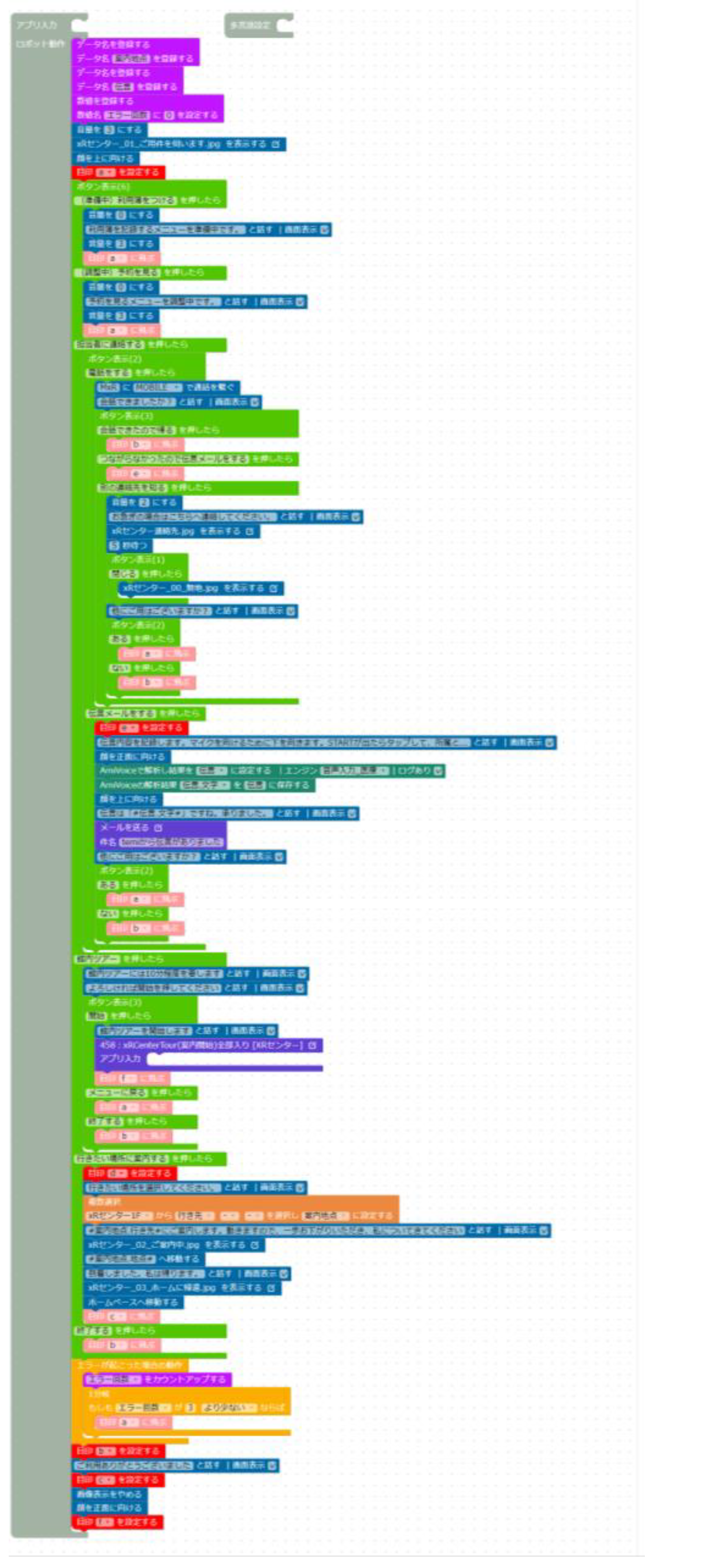
これらの一連の作業はすべてブラウザを通して行うことができ,特別な操作ソフトウェアは不要である(図5).

2.2 実証実験の目的と概要
本実証は,当院の外科系ICU(以下,SICUと称す)の協力のもと実施した.本実証は,病院内のあらゆる院内業務支援(遠隔面会,回診補助,物品搬送,患者対応補助等)を汎用型多目的ロボットであるtemiを使い,医療従事者の非医療業務やルーティン業務のタスクシフトを行うことで,医療従事者の業務負荷の軽減に寄与できるのかを目的に効果を検証する.temiの仕様については後述するが,機能としては,自律走行・AIアシスタント・テレプレゼンス機能を持った家庭での利用を目的としたパーソナルロボットである.当ロボットは,SDK(システム開発キット)が用意されておりサードパーティによるアプリケーション開発が可能となっている.今回の実証ではtemiを制御するためのアプリケーションであるBuddyBotを利用し,まずは病棟業務の支援が可能かを実証した.
- <実証実験概要>
- ■実施期間:2022年1月17日~1月20日(※準備日含む)
- ■場所:名古屋大学医学部附属病院内
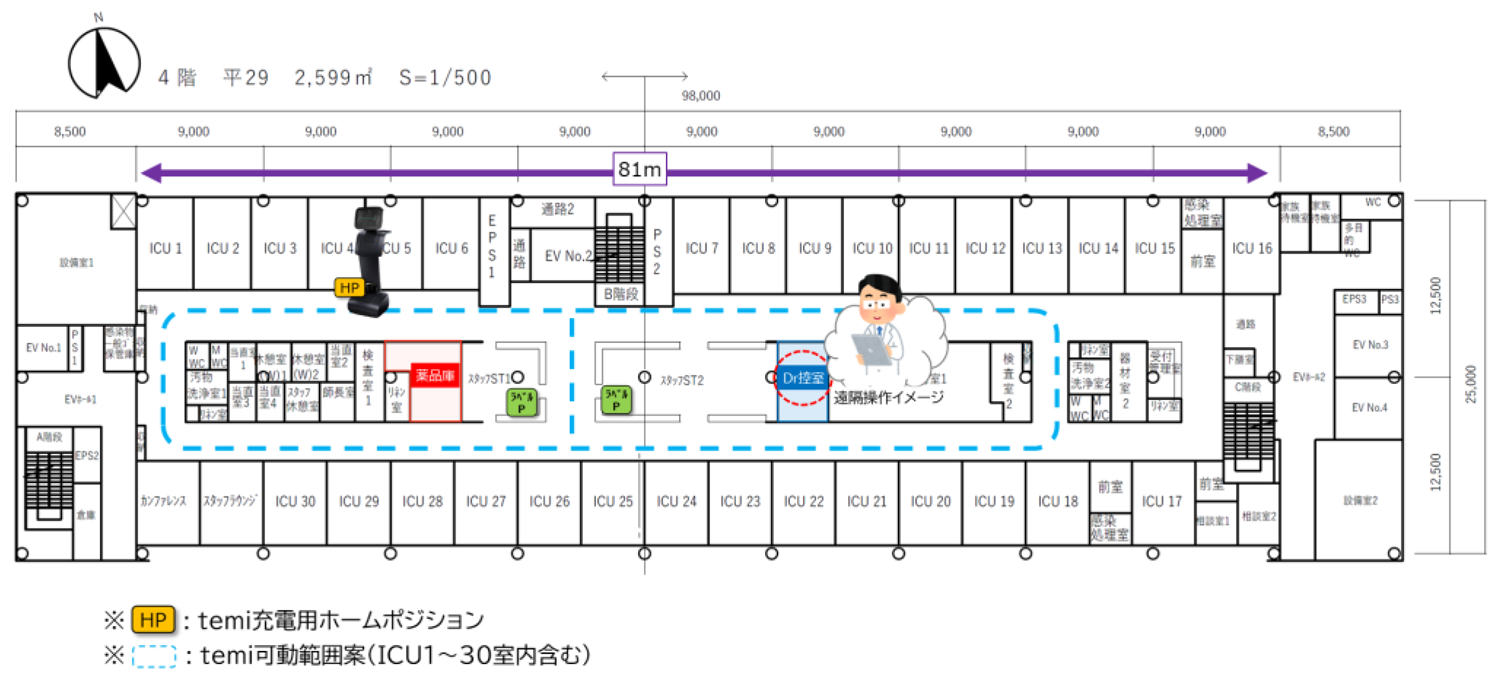
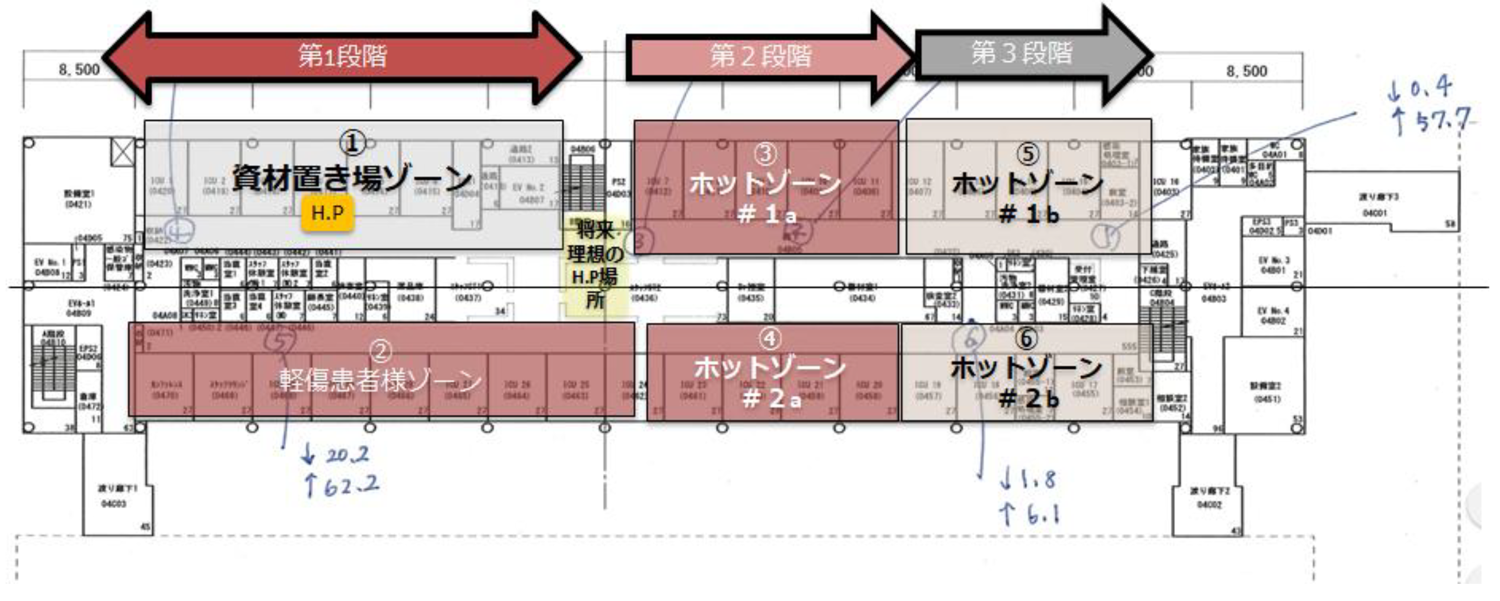
- SICU(外科系重症病棟)※平面図を図6に示す.
- ■ロボット利用台数:temi1台
- ■主な実施内容(ユースケース):
- temiを使った遠隔コミュニケーション
- (1)temiによる医薬品等の搬送業務
- (2)安全性確保,感染症予防への対応
- ■評価項目(アンケート)
- ・temiの操作や使い勝手
- ・運用面でのメリット・デメリット
- ・モビリティ機能やテレプレゼンス機能の操作性
- ・走行時の安全性
- ・走行中における通信ローミングの検証
2.3 ユースケース
2.3.1 SICU内の看護師と病院内外の医師との遠隔コミュニケーションツールとしての活用
当院のSICUは主科がなくセミクローズ運用で,手術を終えた患者が一般病棟へ戻るまでのリカバリ対応を行っている.SICUに患者が入院をしている間,SICU専属の医師に加え,手術を行った診療科の医師が治療方針を決定する.SICU内の看護師は,それぞれの医師の指示を仰ぎ,患者のケアにあたっている.各診療科の医師はSICU内に常駐しておらず,看護師は医師の指示を仰ぐために,院内携帯電話を用いて口頭で患者の状態を説明する必要がある.状況によっては,看護師が医師に診察を依頼し,医師がベッドサイドへ駆けつけて患者の状態を実際に診ることで,治療に必要な投薬や処置等の指示を行うこともある.その際,看護師は,患者の状態を口頭で説明するのみで十分対応できるレベルの症状なのか,すぐに医師に診察を依頼すべき状況なのか,判断に迷うケースがある.また,特に,夜勤帯のように医師が当直室や病院外などSICUから離れた場所にいる場合は,医師が駆けつけるのに時間がかかることで,結果的に医師の診察が不要なケースでは医師の移動の負担が生じ,逆に診察が必要なケースでは,看護師が医師を呼ぶべき状況かどうかを判断に悩む時間が治療上のロスタイムになり得ることがある.
こうした課題を解決するために,SICU内を走行するtemiとSICU外にいる医師側が持つtemi専用アプリインストール済みのモバイル端末を用いて,遠隔コミュニケーションを行った.
利用シーンは次の2つを想定した.
- ①看護師が,医師に患者の状態を確認してほしいタイミングで,temiから医師を呼び出し,テレビ会議を開始.看護師が患者のベッドサイドまでtemiを誘導し,患者の状態を医師とコミュニケーションを取りながら確認する.
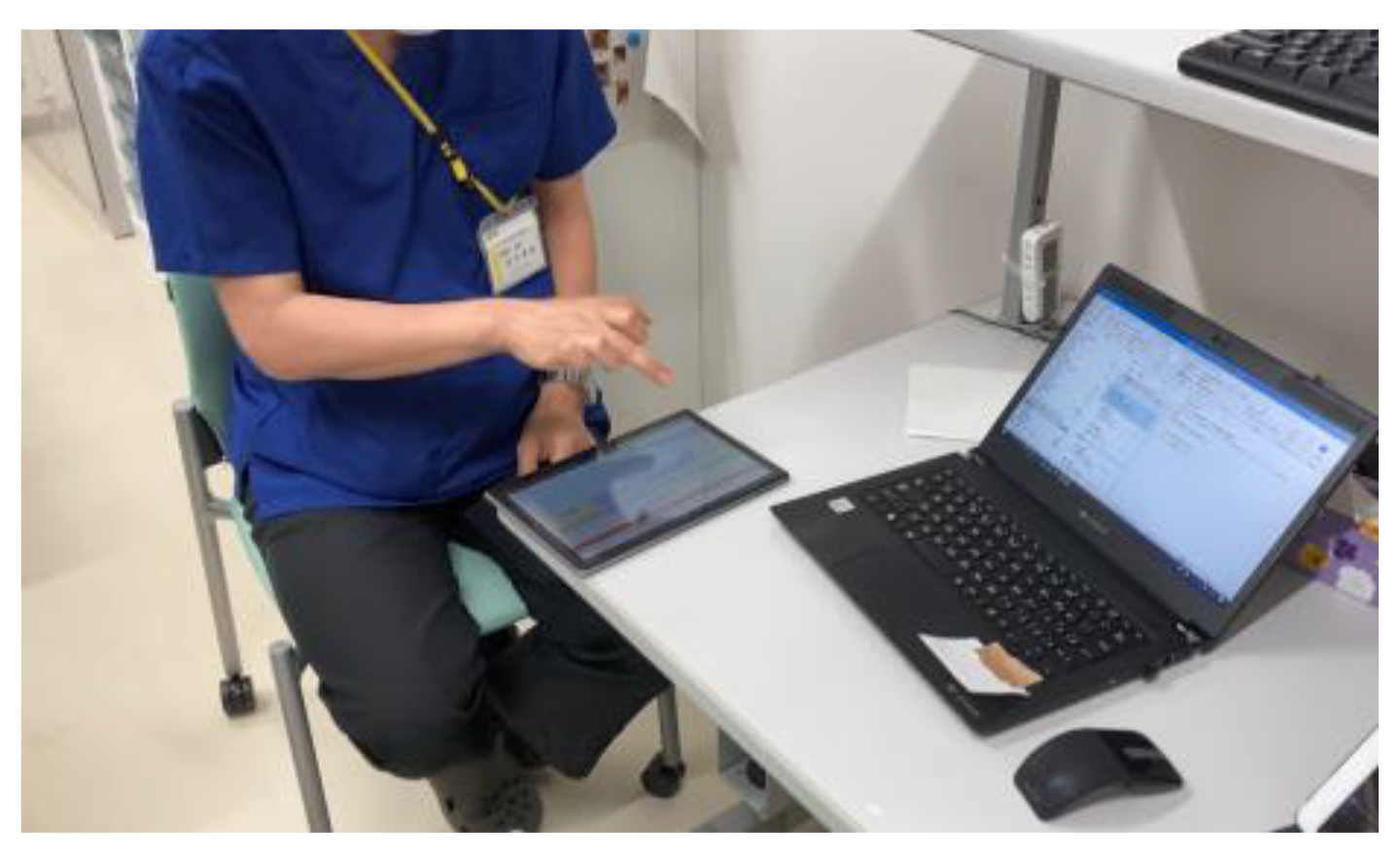
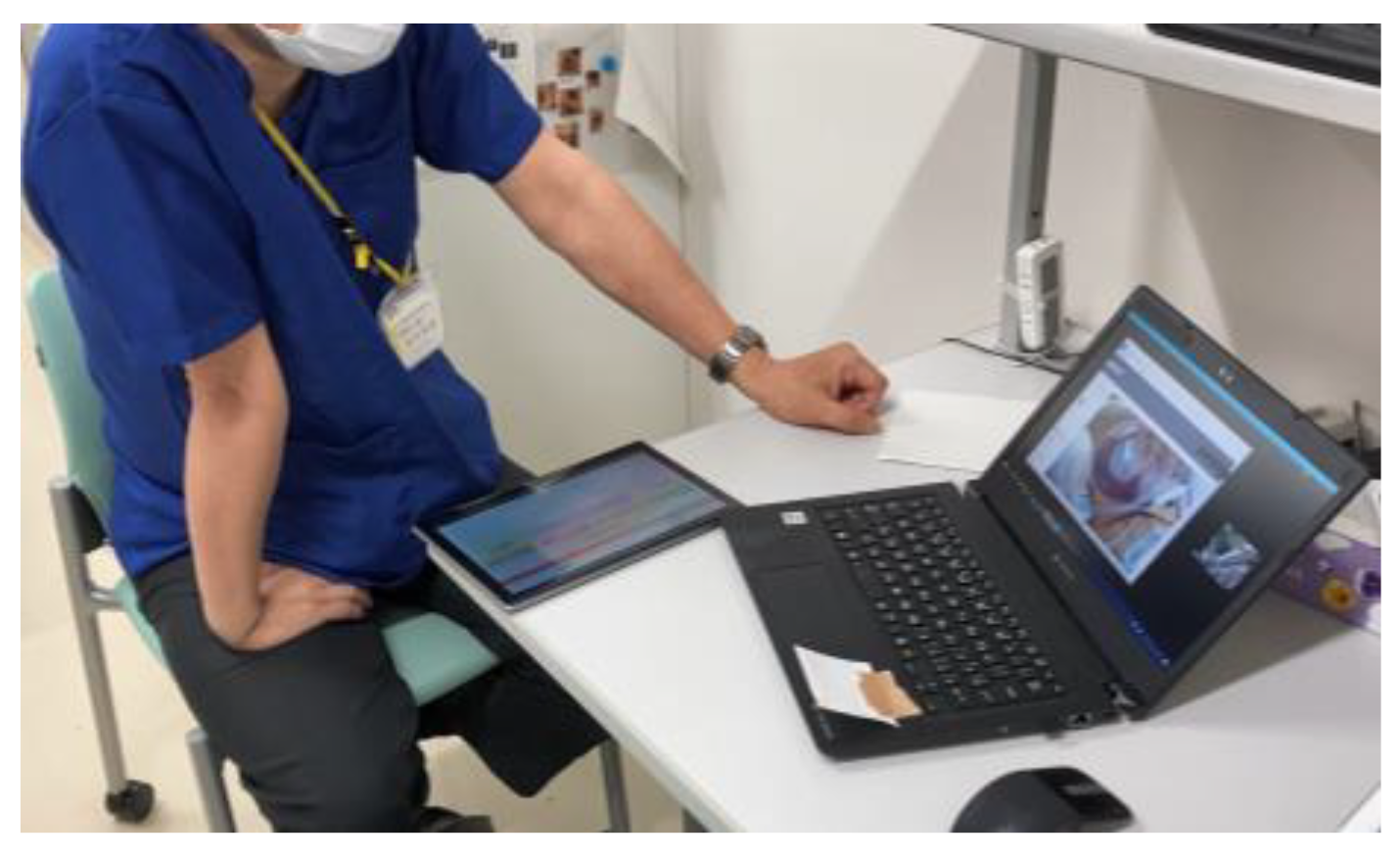
- ②SICU外にいる医師が,temi専用アプリを起動し,モバイル端末からtemiを遠隔で操作し(図7),患者の様子を確認する(図8).必要に応じて,看護師に患者の状態を確認や指示出しをする(図9).
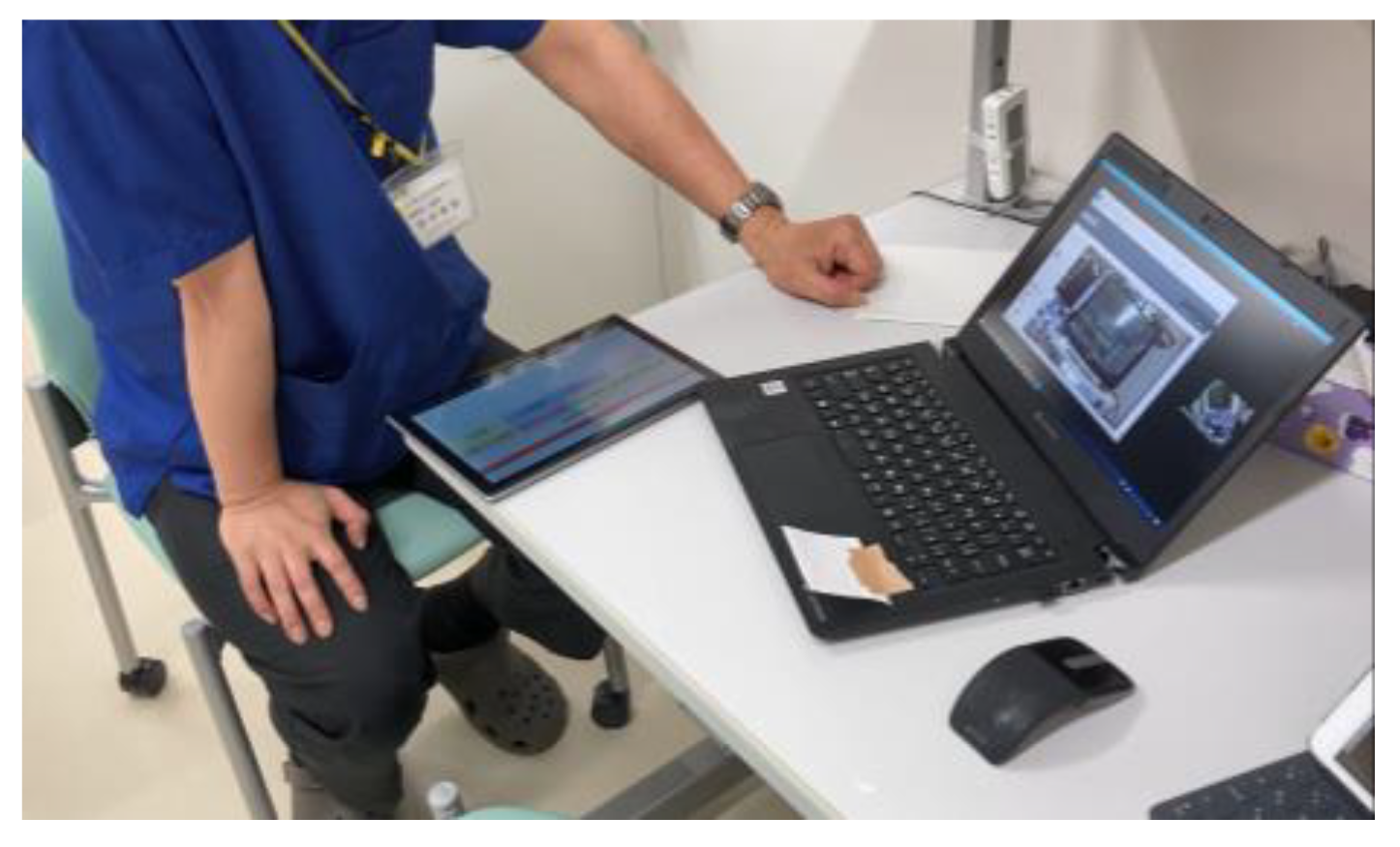

なお,temiのカメラは頭部のタブレット部にあるため,チルトの動作範囲の限界から視認に限界があるため,別途IPカメラを院内Wi-Fiに接続し,ノートPCから併せて確認できる構成とした.実証実験では,ノートPCからtemiに接続し,以下の確認を行った.
- ⅰ)腹腔ドレーンの排液の確認(図10,図11)
- ⅱ)呼吸器の波形のチェック
- ⅲ)血液のチェック(図12,図13)
- ⅳ)生体モニタのチェック(図8,図14(a),図14(b))
- ⅴ)手の静脈のチェック





まず,映像と音声の状況については通信環境の影響もあるが,IPカメラからの映像はタイムラグがあり,医師側から見る映像は時折コマ落ちの状態となったが,temiのカメラはコマ落ちせず,比較的スムーズに映像を配信することができていた.
現場の看護師との通話についても,temiのスピーカおよび医師側のノートPCともにコミュニケーションに関する不都合は発生しなかったが,病室内はさまざまな機材があり,temiを追従モードでエスコートするのは難しい状況であった.
ドレーンや医療機器モニタの視認については,カメラの性能が問われた,IPカメラ側は寄りすぎるとピントが合わず,位置調整が必要となったが,言葉では伝えづらい波形の状態や目盛りの数値の確認は行えた.照度の影響もあり血液中のコアグラは確認ができたが,色合いの濃淡,小さな傷,皮膚の状態の判別に関しては診断として利用するには課題が残った.カメラの性能によっては,視認性の向上が期待できるため,製品の選定については今度の課題と言える.また,ロボットやIPカメラは通信環境の影響を受けるため,安定かつ十分な通信速度などの環境整備も必要である.
2.3.2 軽量な薬品等の搬送作業への対応
当院のSICUでは,患者に投与する薬品のオーダを医師が行い,薬品庫の看護師が準備しそれをベッドサイドまで届けている.図2にSICUの平面図を掲載したが,薬品庫から遠くの病室までを往復すると100m近く移動することとなる.ベッドサイドにいる看護師が搬送依頼を伝える術はPHSだけのため,PHSから連絡し,薬品庫よりベッドサイドまで持ってきてもらっている.1日に発生するオーダ件数は平均して600件程度であるが,担当看護師が1日に移動する歩数から換算するとおおよそ,4,200歩で約3km移動していることとなる.移動時間を考えると,1日40分移動時間に費やしていると言える.
この医薬品の搬送をtemiに代行させるのが目的であるが,実際の患者の医薬品を搬送させるにはリスクもあるため,実証実験中は立ち合いの上,実施時間帯および,搬送先となる担当看護師を決めて運用を行った.まず,temiはもともと搬送業務を行うためのロボットではないため,背面の台座にセンサに干渉しないように配慮し,簡易的な搬送かごを取り付けた.セキュリティ面を考慮すれば,鍵付きのボックスが望ましいが今回は部外者が容易に入れるエリアではないということと,立ち合いがいるため,考慮から外した.
実証実験でのシナリオの流れは下記となる.
- ① 薬品庫にいる担当看護師がモバイル端末のランチャーからtemiを薬品庫に呼び出す(図15).
- ② 薬品庫前に到着したtemiは薬品庫内の担当看護師に到着したことを音声によって通知.
- ③ 担当看護師は医薬品をtemiのカゴに積載.
- ④ 搬送後にtemiをホームに戻すか薬品庫に戻すかを頭部モニタに表示される選択肢から選択(図16).
- ⑤ 続いて,行先となる病室を選択.
- ⑥ temiが目的地に向けて移動(図17,図18).
- ⑦ 目的地に到着後,病室内にいる看護師に到着したことを音声によって通知.
- ⑧ 医薬品を受け取り(図19),内容確認後「受取完了」を選択.
- ⑨ ④で指示された場所に戻る(図20).






temiによる搬送は薬品庫と病室を行き来することを連続して3回行った,図21のホームポジションからスタートして3回目を終了し戻るまでの時間を示す(障害物を避け,一時停止している時間も含まれる).2回目の搬送は,積載上限に近い5kg程度の重量を積載したため,左右に振られながらの走行となったが,人の補助なく自走で搬送完了することができた.

今回の実証では,担当看護師が医薬品積載後に搬送するtemiに追従したため,薬品庫に戻った際の準備に多少の時間ロスが発生したが,載せる医薬品が事前に用意されていればさらなる時短が可能と思われる.
2.3.3 安全性確保,感染症予防への対応
ロボットを扱った実証実験を行う上で,一番注意しなければならないのは治療中の患者に対して問題を起こさないことである.ロボットが予期せぬ動きや,病棟スタッフと衝突して運用を止めてしまわないためにも,安全性確保は最優先事項である.また,コロナ禍においてロボットが感染源となるリスクも考えなければならない.安全面に関して,実証実験開始前に対象病棟の看護師だけではなく,SICUを行き来する関係者に対して,実証実験について十分な周知を行い,実証実験実施時間帯を決めて実施した.
実施当日は,temiの移動中は立会者が追跡し,予期せぬ挙動を行う場合は停止できるよう人員を配置したが,実証実験中は危険な挙動や衝突等のトラブルは一切発生しなかった.医薬品の搬送では,temiの移動時の音が静かなため,「搬送中です」といったセリフを移動中は発するようにした.
感染対策としては,SICU内に出入りする場合は,必ずアルコールによる清拭を行った.
2.3 アンケートによる評価
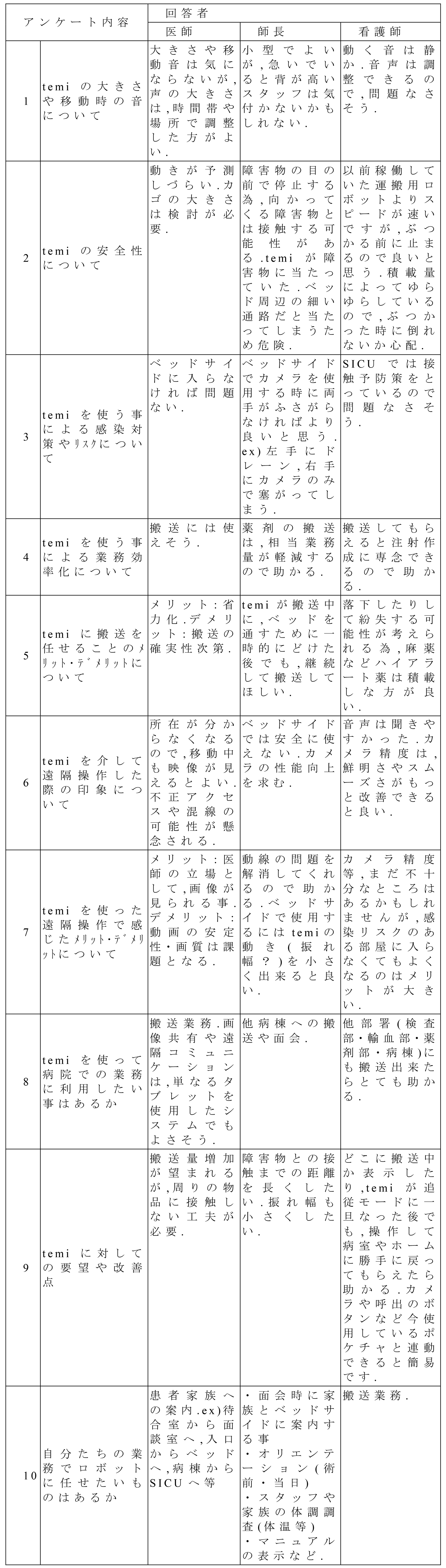
今回の実証実験では,SICU病棟配置の3名の医療スタッフに参加いただき,実際にtemiを利用してもらった.終了後にアンケートを行ったので,結果を表1に示す.
3.病院内利用を鑑みたロボットの基盤・運用技術
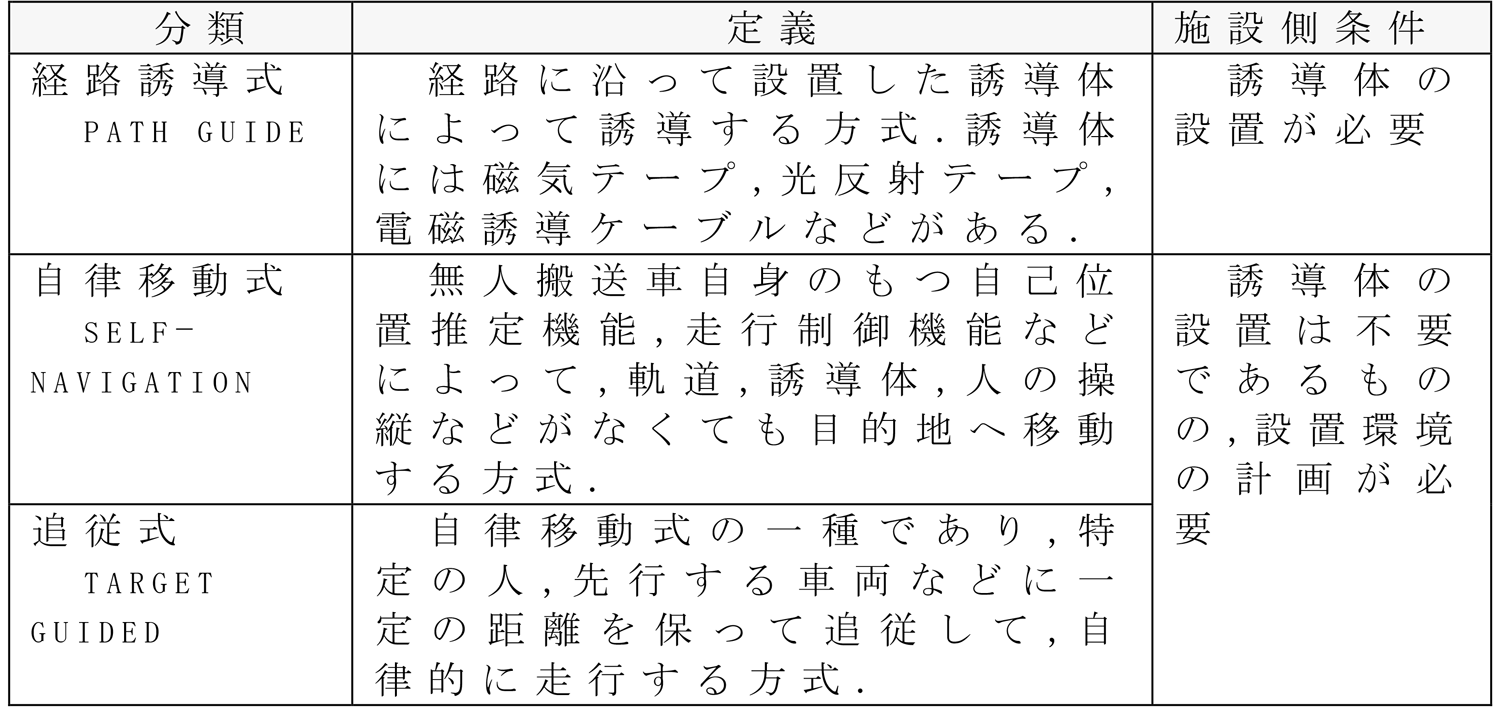
現在普及している自動走行型のロボットは,自動移動方式に応じて以下に大別される.temiはLIDAR SLAM等による自律移動式ナビゲーションシステムを有する.
3.1 SLAM技術の特徴と運用技術の意義
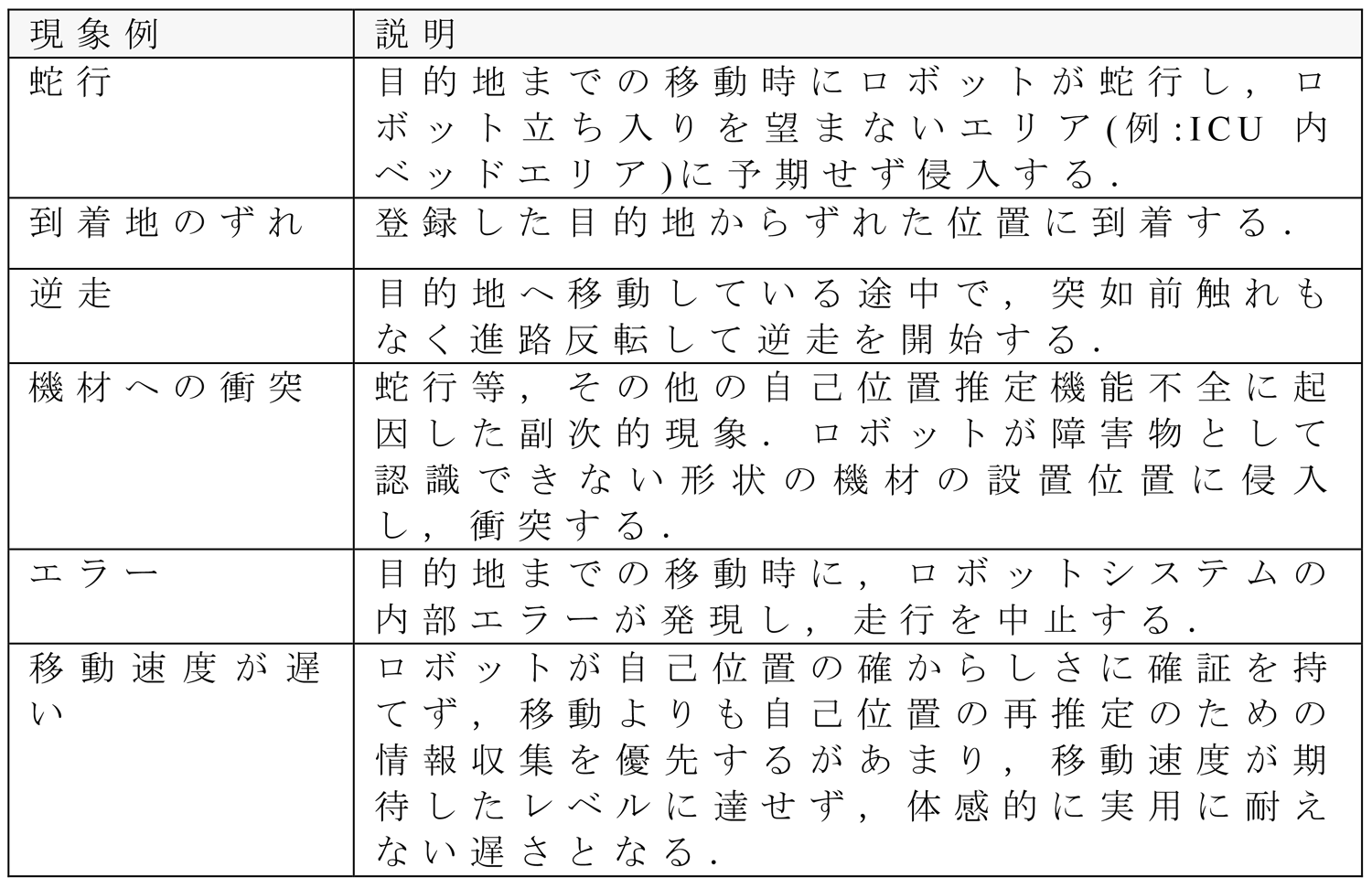
自己位置推定は,temiを含む自律移動式ロボットが自動走行するための根幹をなす機構・機能の1つである.一方,設置環境や周辺状況によっては,自己位置推定が十分に機能せず,結果として病院職員が予期できないような動きをtemiが取ることがある(表3).これらを回避し,業務内でtemiを安定的に活用するためには,自己位置推定機能が常時機能するような運用技術の確立が重要となる.
これまでの実証を通して,自己位置推定を機能させるための運用戦略として,下記が重要であるとの知見が得られた.
- 1)ロボット運用に関するゾーニング
temiの活動範囲を,自律走行しサービス提供可能なエリア,人による補助の元でのみサービス提供可能なエリア,ロボットに侵入させないエリアの3分類に区分することが重要である.しかしながら,このゾーニングをどのように行えばよいかについての統一的な基準がない.そのため,次節以降の制約事項を考慮しながら,消去法でゾーニングを行っていくというアプローチをとることが有効である. - 2)環境地図の正確性に関する制約理解と対処
temiが自ら周囲の環境を学習し内部的に描く環境地図は,自己位置推定の基礎となる.その正確性を確保するための3つの要素は,ロボットが正しく認識できる壁面素材,ロボットが特徴として認識できる壁面形状, temiの走行過程で生じる誤差の軽減である.また,これらの条件を満たしえない個所,かつ業務上temiの侵入の必要性の薄い個所については早期に見極めた上で, temiの環境地図学習対象から除外するべきである. - 3)自律移動に関する制約理解と対処
temiは,LiDAR等センサでセンシングしたデータに基づき,学習した環境地図の探索を行いながら自己位置を推定する.しかし,どうしてもある程度の誤差が環境地図には混入してしまう.その場合でもスムーズな運用を行うために,自己位置の性格な推定と,目的地に移動することのトレードオフを調整し,検証することが重要である.
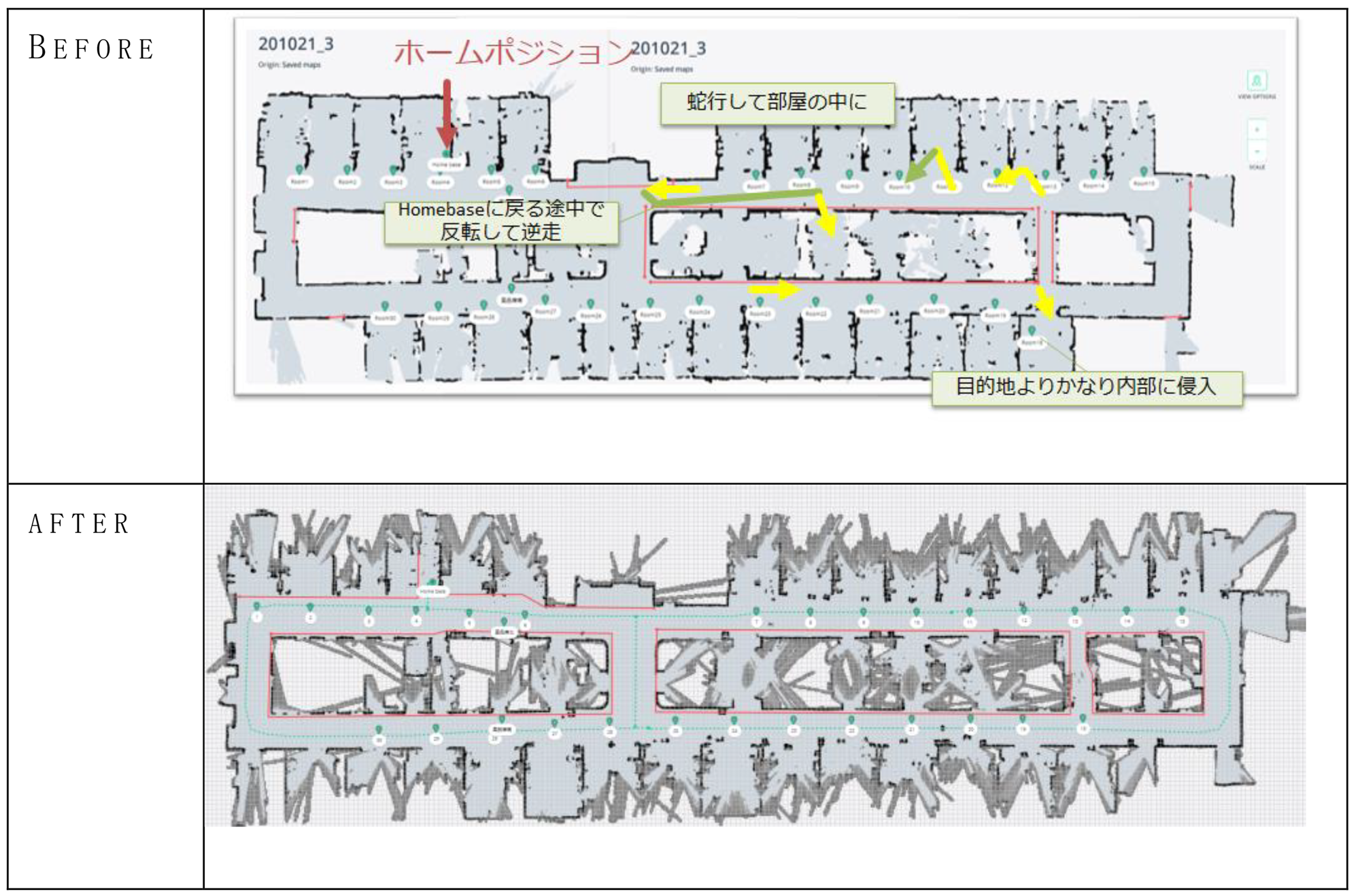
これらの運用技術を確立することで,表3に上げた現象の発生は抑制され,実用に耐えるロボットの動作を実現することができた(図22).以降の節では,前述の各種制約の詳細,制約下において取り得る対処方法とその結果事例について記述する.
3.2 環境地図の正確性に関する制約と対処
3.2.1 壁面認識
1)各種制約の詳細
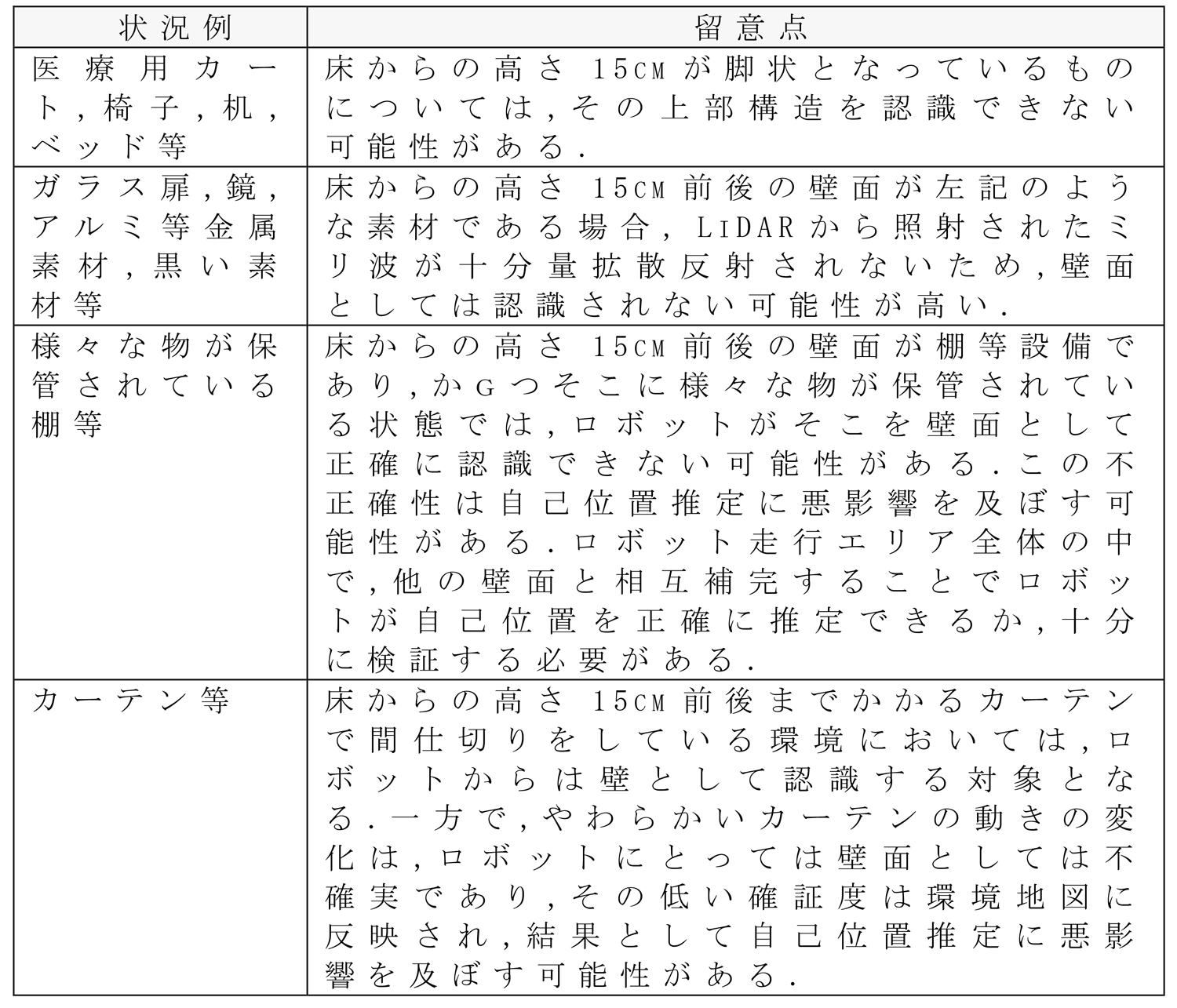
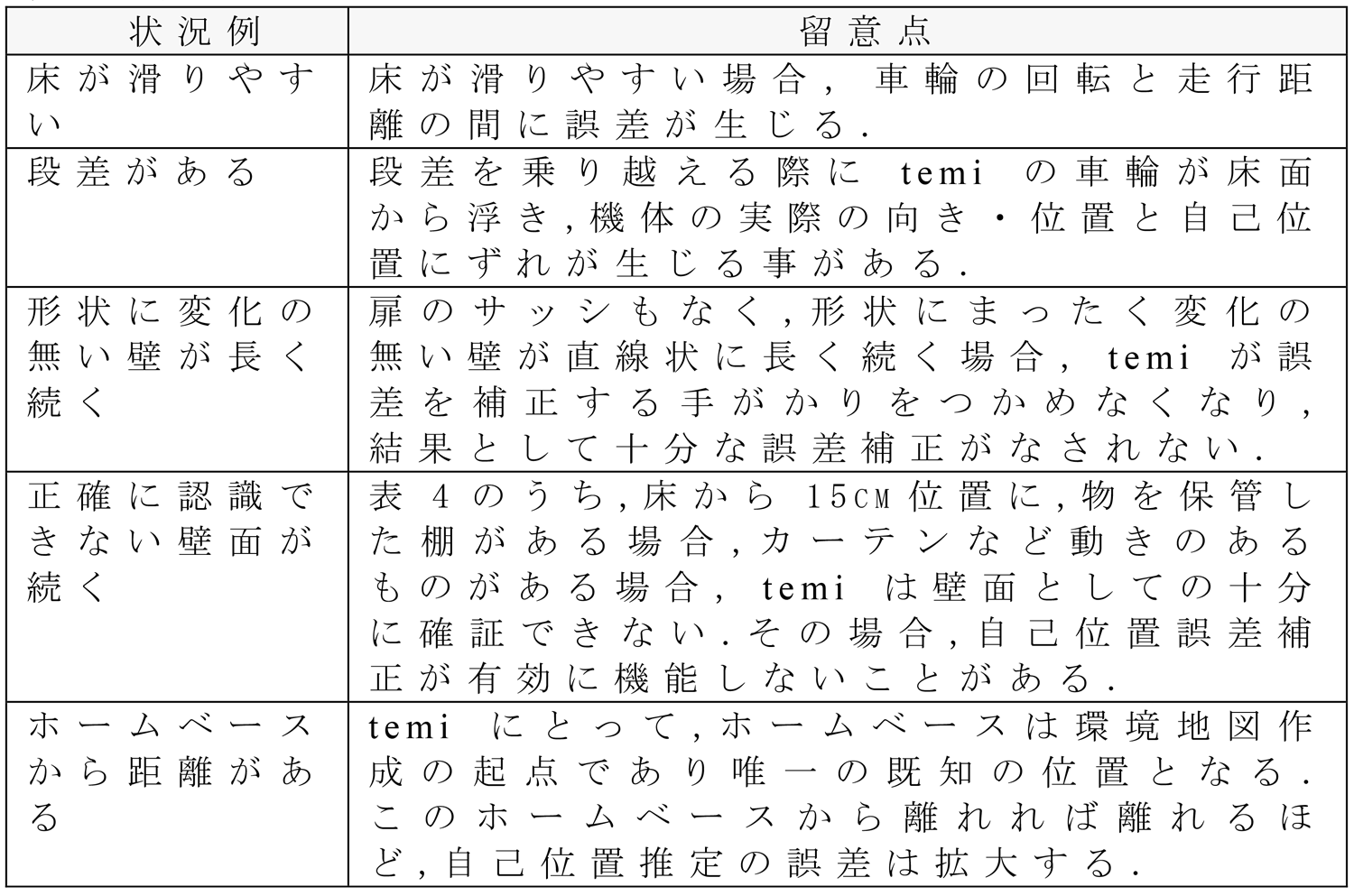
temiは,床からの高さ15cmに搭載したLiDARのセンシング結果に基づき,壁面を認識して環境地図を作成する.当該LiDARはミリ波を照射し,その反射に基づいて壁面を認識するため,表4に記載するような状況下では注意が必要である.
2)制約下で取り得る対処方法事例
医療用カート,椅子,机,ベッド等が固定設置されている場合は,衝突回避のためにジオフェンスを設定する.それらが固定設置されておらず,移動式機材として運用されている場合は,それらを取り除いた状態で壁面学習を行うほうが望ましい.
壁面の一部がガラス扉,鏡,アルミ等金属素材,黒い素材等で覆われている場合,ミリ波レーダを拡散反射する素材(窓ガラス目隠しシートなど)(図23)の施工を検討する.合わせて,そこを通行させないことを目的として,衝突回避のために環境地図上にジオフェンスを設定する.

3.2.2 環境地図の誤差
1)各種制約の詳細
temiは実際に走行しながら環境地図を作成するが,その過程においても自己位置の推定が必要である.この場合,ホームポジションから走行した距離および方向に基づき自己位置を推定する.ここにある程度の誤差が発生することとなり,結果として作成される環境地図にもその誤差が反映されてしまう.
temiは内部的に誤差の補正を試みる.しかしながら,補正不可能な誤差が一定以上の程度・割合で発生すると,自律走行に悪影響を及ぼす(表5).
2)制約下で取り得る対処方法事例
医療施設において床が滑りやすいという状況は考えにくいが,万が一そのようなエリアをtemiを走行させる場合には,滑り止めマット等の施工を検討する.同様,1cm以上の段差が存在する場合には,temiの乗り上げ衝撃を吸収するクッション素材等で養生することを検討する.
扉のサッシもなく,形状にまったく変化のない壁が直線状に長く続く環境があり,そこでtemiがスムーズに自律走行できない場合,環境地図に許容程度を超える誤差が混入している可能性が高い.その場合は,途中個所に設置物を置くなどtemiにとっての目印設置を検討する.
自己位置の起点であり唯一の既知の位置となるホームベースは,可能な限り走行エリアの中央に設置する.ホームベースは,壁面に密着する形で設置し,横滑りしないよう耐震シール等で底面・背面を床面・壁面に固定する.ホームベースの左右50cm以内および前方120cm以内には物を設置しないよう留意する.
3.3 自律移動に関する制約理解と対処
3.3.1 経路計画の方法
1)各種制約の詳細
temiは学習した環境地図より,目的地への最適経路を探索する.3.2節に記述したとおり,temiを走行させる経路は,必ず障害物がない状態で環境地図を作成しておく必要がある.加えて,temiは走行中に自己位置推定,障害物の認識と迂回行動を同時に行う.自己位置が不確かであると,走行よりも自己位置を推定できる特徴を探すことを優先し,結果として蛇行することがある.また,temiを走行させないエリアの壁面情報を含む環境地図は,temiの自己位置推定に貢献しない.一方,自律移動時においてロボットが行う最適経路探索に使用されてしまう可能性があり,誤った結果を導く可能性がある.
2)制約下で取り得る対処方法事例
3.2節に記述のとおり,環境地図は可能な限り正確に作成する.temi v121以降が提供する経路設定機能は,積極的に活用する.経路の設定方法について,下記の点に留意する.
- 経路は,一筆で描けるようであれば,一筆で描く
- 経路は絶対ではなく,障害物迂回の過程で逸脱することがある.ガラス,機材,侵入を望まないエリアには近づけすぎないこととする
- temiは,機体の両サイドに一程度のマージンを確保して走行する.経路を壁面に近づけすぎないよう留意する
また,temiが走行しないエリアを決定可能な場合は,当該エリアの学習させない方が望ましい.
3.3.2 障害物認識の方法
1)各種制約の詳細
temiは,搭載するさまざまなセンサで障害物を認識する.しかしながら,temiに向かってくる人や,temiに向かってくる別の移動体ロボットを迂回することは難しい場合がある.また,太陽光が差し込むエリアや床面の反射光の度合いによっては,障害物として誤認することがある.
2)制約下で取り得る対処方法事例
temi走行中は人に気づいてもらうために,音声等を用いて人に存在を通知し続ける運用とする.また,複数の自律走行ロボットを運用する場合は,ゾーンを分けて干渉しないようにすることが重要である.合わせて,病院職員の頻繁な往来が予見される緊急搬送エレベータにつながる通路付近等は,ジオフェンス等を設定することで,temiを近寄らせないようにする.
太陽光が施設内に差し込む場合は,太陽光の入射角度を考慮しながら,自律移動走行の運用テストを実施する.その上で,太陽光や床面反射光を障害物として誤認する場合は,あらかじめ当該個所をバイパスするよう経路を再設定することが重要である.
3.4 ゾーニング技術
3.4.1 ゾーニングと段階的拡張
今回の実証を経て得られた知見に基づき,自律走行ロボットtemiを病院施設に導入していくための基本的ステップを以下に示す.
- 1)自律走行させるエリアの広さを考慮し,ホームベースの位置を仮決定する
- 2)使用目的に照らして,temiを自律移動させる幹線ルートと,temiを追従等で移動させるブランチルートに分離する
- 3)環境地図の作成は,ホームベースを中心に小さく始めて,『表3 自己位置推定機能不全時に発生した現象』で示したような現象が発生せず,動作が安定するのであれば,徐々に拡張していくアプローチを取る(図24)
3.4.2 自律走行が困難なエリアの見極め
ナースステーションは,医療用カート,椅子,机が密集して設置されているケースが多いため,temiの自律走行エリアとしないほうが望ましい.
患者ベッドが設置されている病室内は,当該エリアの大半を占めるベッドの存在をLiDARが認識できない可能性が高いため,環境地図に反映できない.temiの自律走行エリアとせず,人への追従走行を前提とするほうが望ましい.
薬品庫,備品庫は,両壁面を棚で囲われているケースが多いため,temiの自律走行エリアとしないほうが望ましい.
カーテン等で間仕切りされるエリアは,ロボットが自己位置を見失い,身動きが取れなくなる可能性があるので,temiの自律走行エリアとしないほうが望ましい.
3.4.3 代替案の検討
ベッドサイドなど,temiの自律走行は難しくも,活用が期待されるところについては,人の介入に基づく運用(追従機能や,物理的にtemiを押す)を検討し,うまくベッドサイドの適切な位置,角度でtemiをポジショニングさせるようにする.
また,ナースステーションなど,機材や人が密集するところについては,temiの作業状況や結果を通知するタブレット,PCを準備し,病院職員用の操作インタフェースとして活用することを検討する.
代替案の選択肢を増やすためには,temiと,その他のIoT機器およびクラウド技術との連携が欠かせない.この実現のためには,2.1.2項のとおり,ソフトウェアによる柔軟なロボット制御技術が必須となる.
4.スマートホスピタルにおけるロボット化の将来と課題
本章では,今回の実証実験を通じて得られた,ロボットを扱う上での留意点や,将来の人とロボットの協働社会に向けての課題や期待する点について記載する.
4.1 施設計画におけるロボットバリアフリー
スマートホスピタル構想では,将来の就労人口不足という課題に対し,人を支援するロボットの活用が不可欠であると考えている.現在我々が利用している施設や設備のほとんどが,人とロボットの協働を考慮した設計や機能になっているとは言いがたく,人だけでなく,ロボットにとってもロボットバリアフリーという考え方が重要であり,人とロボットの協働社会において効率的に業務を行う上で必要不可欠であると考える.
ロボットの特性やサービス動線といった運用を考慮し,病院内なので,当然職員だけでなく患者との交差動線も考慮して設計を行う必要があるが,ロボットのセンシングや移動能力は,メーカによって仕様もさまざまで,段差や傾斜,エレベータの敷居間なども配慮が必要となる.また,目的地に行くために,エレベータやセキュリティドアを利用する際,設備機器との連携も必要となる.搬送・警備・清掃・案内等の役割に特化したさまざまなサービスロボットが国内外のメーカから提供されており,異なるメーカのロボットを同一施設内で運用するには,施設の基本計画段階から検討する必要がある.竣工後の導入では,改修や設備連携の調整や制御システムの変更にコストがロボットメーカごとにコストが発生してしまう懸念もあり,ロボットを導入する上での経済面での障壁となる.
4.2 ロボットの特性を理解した運用への組込み
現在,ベンチャー企業を含めさまざまな企業がサービスロボットの開発を進め,販売を行っている.ロボット開発におけるプログラミング言語やインタフェースに関して標準化が進んでおらず,また安全に利用する上でのガイドラインや法規制の整備もまだ時間がかかるといえる.現在世の中に出ているサービスロボットは清掃や搬送,警備といった一部の業務に特化したロボットが多く,なんでも指示したことを行えるロボットはまだない.よって,自分たちの業務のどの部分がロボットに行ってもらうことができるのか,そして運用に組み込む上で動線や安全面,利用環境が整っているかなどさまざまな配慮や検討すべき項目が多い.下記に一部項目を挙げる.
- 利用環境の整備:Wi-Fi等の通信インフラ
- 運用動線の課題:手動ドアなど人手が不要なルート,改修の必要性など
- 設備機器との連携:エレベータや自動ドアとロボットの連携
- 安全性:ロボットのセンシング性能,人との交差動線の検討
- セキュリティ:友連れ侵入の防止,セキュアな通信環境
- 保険など:対人対物保険等
- 管理体制:管理責任者や部署の検討
- 保守体制:メーカとの保守契約等
4.3 スマートホスピタルにおけるロボット運用の位置づけ
スマートホスピタルにおける命題の1つである省力化と効率化を実現するためにはロボットの導入は避けて通れないと言えよう.多くの病院で進められていく積極的なICT導入による医療機器の小型化やソフトウェア化,種々のIoT機器の導入により,ロボットが検査機器を患者に届け,患者が自分自身でさまざまな検査を行うことが可能となったり(Point of care testing),ロボットが医薬品や医療材料をオンデマンドで届けたりするようになる.これによりストレージの最適化や管理する人の省力化につながるだけでなく,サプライチェーンのデジタル化や自動化,ロボット化などによって,外部の物流システムなどさまざまなシステムと連携し,運用することが可能となる.医療のみならずヘルスケアや物流といった病院を取り巻くシステムの連携:System of systemsが新しいエコシステムを形成し,ロボットはその中核的な役割を担うと言っても過言ではない.このような将来を見据えた,スマートホスピタルにおけるロボット運用を進めるにあたり,現場へのロボット導入ありきのベンダ主体の押し付け導入ではなく,主体的なヒトのかかわりを中心とした院内の本質的・効率的な省力化ポイントがどこかを見極めた投資を行っていくことが重要である.人への投資を含めたこれらの投資のほとんどは先行投資となり,保険償還をベースとした従来の医療機関における収益ロジックに乗りにくく,短期的には利益に繋がらない可能性がある.しかし,長期的にはICTを用いてロボット化を活用したスマートホスピタルでの医療サービスを改善し,業務効率を高め,患者や医療従事者の満足度の向上がもたらされることで,全体としての好循環に繋がると考えられる.狭い視点でなく,病院全体や地域全体の視点で決定・評価をできるような人材をスマートホスピタルにおけるキーパーソンに充てることが重要ではないか.
参考文献
- 1)temi : https://www.robotemi.jp/
- 2)temi SDK : https://github.com/robotemi/sdk/wiki, Android SDK : https://developer.android.com/guide
- 3)BuddyBot提供機能一覧:https://www.BuddyBot.cloud/
- 4)BuddyBotを用いたブロック組み上げの例:https://www.BuddyBot.cloud/
- 5)無人搬送車システムに関する用語 JIS D6801:2019 : http://www.kikakurui.com/d6/D6801-2019-01.html (2022.1.31閲覧)

大山慎太郎(非会員)oyama@med.nagoya-u.ac.jp
名古屋大学医学部附属病院 メディカルITセンター特任助教.2007年名古屋大学医学部医学科卒後整形外科臨床医として勤務.2014年より理化学研究所画像情報処理研究チーム,2017年より現職.病院Dxを目指したスマートホスピタル構想を牽引.

山下佳子(非会員)kei-yamashita@med.nagoya-u.ac.jp
名古屋大学医学部附属病院 メディカルITセンター研究補佐員.名古屋大学大学院情報科学研究科修了後,2014年より名古屋大学医学部附属病院メディカルITセンタにて,病院内でのIoT等を活用したスマートホスピタル構想推進のための研究に従事.

小倉 環(非会員)ogrtmk00@pub.taisei.co.jp
大成建設(株).2011年大成建設(株)入社,主に病院施設の建替え業務に従事,医療情報や医療機器の導入支援を担当.現在はスマートホスピタルに関するIoTやロボット等の実証実験やソリューション開発を担当.
藤原友莉子(非会員)hzwyrk00@pub.taisei.co.jp大成建設(株).看護師,病院への電子カルテ導入コンサルタントを経て,2019年大成建設(株)入社.スマートホスピタルに関するソリューション開発に従事.慶應義塾大学大学院健康マネジメント研究科卒業.
高椋大寛(非会員)takamuku.tomonori@monoplus.com
モノプラス(株).ITアーキテクト,デジタルコンサルタントを経て,2018年より現職.ロボットやカメラ・センサ機器を活用した業務DX支援を行う傍ら,RRI物流倉庫TCにてロボットフレンドリーな環境の整備活動に従事.
白鳥義宗(非会員)tara@med.nagoya-u.ac.jp
名古屋大学医学部附属病院 メディカルITセンター拠点長.2014年より名古屋大学医学部附属病院 病院教授・メディカルITセンタ長・病院長補佐併任,2020年より現職.
採録日:2022年2月7日
編集担当:江谷典子(ANA)