カーリングの競技支援を目的とした工学的アプローチによる実証型研究
1.カーリングと技術的支援
2018年平昌オリンピック冬季競技大会におけるカーリング女子日本代表チームの活躍は記憶に新しい.カーリングがオリンピックの正式種目となったのは1998年長野大会であった.以来,日本女子代表は全大会に出場しており,先の平昌大会ではメダル獲得の快挙を達成するに至った.平昌では男子代表も20年振りの出場を果たし,日本のカーリングが世界レベルにあることが認知された.また,競技力の向上に加えて国内における競技の認知度も高まり,日本のカーリングは今後一層の発展が期待される有望スポーツとなっている.
カーリングは「氷上のチェス」と呼ばれるとおり戦術性が高い競技である[1].そのため,競技に関する種々の情報を収集分析し,局面に応じて的確な戦術立案が必要となる.
一方,近年ではプロスポーツやメジャースポーツを中心に情報通信技術(ICT)を活用する試みが注目されるようになってきた.たとえば,プロ野球では選手やチームの能力やパフォーマンスを定量化して評価するセイバーメトリクスが普及している[2].競泳では,映像情報と計測時間情報を活用することで競泳選手の詳細なパフォーマンスの分析やコンディション判断を行う方法が試みられており[3],バレーボールでは,競技データを収集して戦況を分析するソフトウェアの活用などが提案されている[4].
戦術面が重視されるカーリングについても,ICT を活用して戦術・戦略にかかわる情報を効率よく収集,解析して支援することは有効な支援に繋がると思われる.そこで我々は,ICTによってカーリングの戦術・戦略面を支援できる技術開発とその活用に取り組むことにした.これまで,競技に関する情報の収集と蓄積,収集した情報の整理と解析,解析結果の可視化と共有するタスクを組み合わせることによって,試合情報のデータベース化,ストーン位置の実時間計測,戦術のシミュレーションと推論,ロボットとの連携の実現に取り組んできた.これらの技術を用いることで高度な戦術ナビゲーションや戦術トレーニング支援が実現できる.
以下,本稿では,カーリングがどういったスポーツ競技であるかを簡単に紹介した後,研究プロジェクトについて述べ,我々がこれまで取り組んできた支援技術の一部とそれらの有効性について説明する.そして,プロジェクトがこれから取り組もうとしている計画についても触れてみたい.
2.氷上のチェス,カーリング
カーリングとは,氷で作られた「シート」と呼ばれるエリア内で,2つのチームが対戦するスポーツである.チームは4人で構成され,各チームは8個の「ストーン」を約30m先の「ハウス」と呼ばれる同心円目掛けて投げ合って得点を競う.シート氷面には「ペブル」と呼ばれる小さな氷の粒が散布されている.ストーンはペブルとの摩擦によってカールしながら移動していく(だからカーリングと呼ばれる)のだが,ペブルの分布状態は一様ではなく,室温の変化やストーンとの接触によって常に変化する.競技者達はこれらの微妙な変化を感じ取りながら戦況を見きわめて一投の駆け引きを行い,ダイナミックな試合が展開される.
カーリングを複数の要素からなるシステム系として考えると,物理的要素,人間的要素,戦術的要素を挙げることができる.
物理的要素は,氷面の状態変化やストーンの運動などに関するものである.シートの氷面には,ペブルが散在しており,その上を回転するストーンが通過し,両者の相互作用によってストーンの挙動が決まる.この挙動のメカニズムはきわめて複雑であり,[5],[6]のようにこれまでにも多くの研究報告が存在する.人間的要素は,競技者の競技スキルやフィジカル,メンタルに関するものである.具体的には,デリバリ(ストーンを投じる)やスウィーピング(ブラシで氷を擦る)の技術,アイスリーディング(氷の状態を読む)のスキル,メンタルコントロールの技術などがあり,これらの向上を目的とした生理学的分析やバイオメカニクス的分析,トレーニング方法などに関する研究報告がある[7],[8].
戦術的要素は,戦術立案と関連知識に関するものである.刻々と変化するアイスの状態やショットごとに状況が変化するハウス内のストーン配置などを把握しながら自チームに有利な状況を模索するという高度な駆け引きが求められる.たとえば,相手のストーンを弾き出して自チームに有利なストーン配置を作り,積極的にハウス内にストーンを配置して大量得点を狙うなどの戦術が必要となる場合もある.これらの試合展開を詳細に分析し,試合展開にはどのようなパターンが存在するのか,試合を決定づける要因にはどのようなものがあるのか,戦術・戦略の判断プロセスはどのように行われているのかなどを分析することは競技を支援する上でも学術的にも有用であると思われる.しかしながら,我々が研究に着手した段階では,戦術要素に関する研究はほとんど報告されていなかった.
また,戦術的要素を対象とした研究のためには試合情報カーリング版棋譜データとでもいうべき詳細な試合情報の記録データが必要となるが,当初,そのようなデータはほとんど入手不可能であった☆1.
3.「カーリングを科学する」研究プロジェクト
2015年,カーリング支援に興味を持つ国内5大学の研究者が集まり「カーリングを科学する」共同研究プロジェクトを発足させた[9].プロジェクトは,人工知能,自然言語処理,認知科学,画像情報処理,スキルサイエンス,メカトロニクス,バイオメカニクスなど,近隣異分野に属する研究者で構成される分野横断的研究プロジェクトである点も特徴である.
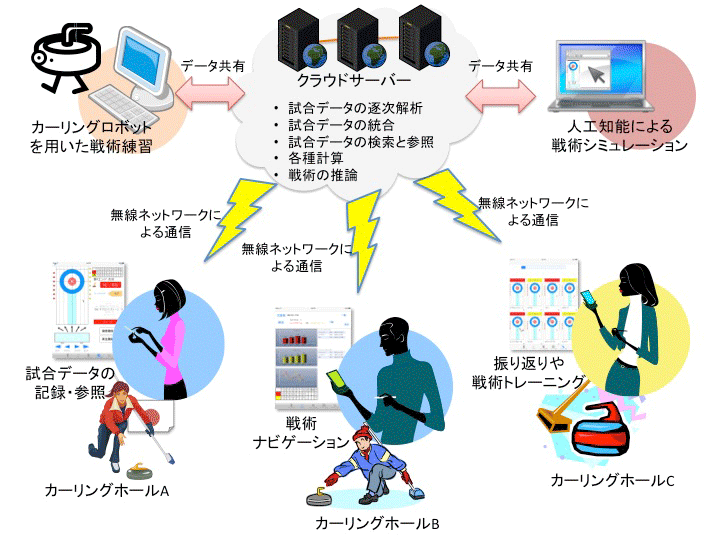
図1は,プロジェクトが実現しようとする支援環境のイメージである☆2.この環境では,競技情報を対象として情報の収集,情報の解析,情報の共有,情報の可視化という要素技術を組み合わせて複数の支援技術を提供する.
3.1 情報の収集と解析
カーリングの試合では,競技者は刻々と変化していくアイスコンディションやショット毎に変化するストーン配置などを逐次把握しながら,自チームを有利にするための戦術・戦略を考える.ショット(ストーンを投げること)には,ハウス内のストーンを弾き出すテイクアウト系列とハウス内にストーンを静止させるドロー系列があり,それぞれより具体的なショット種別が設定されている.競技者は,戦術・戦略の中で,ストーンの回転方向やショットの強さ,投げ出すコース,氷面の状態など多くの要素を考慮に入れた上で次のショットを選択する.
このように,カーリングの戦術・戦略に関して考慮すべき要素は多岐に渡る.これらを試合に参加中の競技者が記録するわけにはいかないので,コーチや補欠選手が記録を担当するのが通常である.従来は,試合の記録は紙媒体による手作業で行われてきた.
しかし,試合記録を行いながら同時に分析を進め,逐次的に戦術立案を行うことは困難であり,試合情報の記録,記録した情報の分析,分析結果の可視化といった処理を自動化することは非常に有効である.
カーリングリンクは全長約40mあり,投球の際にストーンが到達前に手から離れなければならないラインであるホッグラインからハウスの中心まで約30mもある.競技者はチームの戦術にもとづきストーンの挙動を制御する.「氷上のチェス」と称されるカーリングは高い戦術性が求められる.このために広大なカーリングリンク上でストーンがどのように移動するかは重要なデータである[10].
また,カーリングストーンの軌跡を蓄積することで,カーリングストーンの挙動モデルの構築[6]や後述の支援技術にも貢献できる.さらに,ストーンの位置をリアルタイムに認識できれば,ゲーム時の戦略支援・教授支援・学習支援などさまざまなアプリケーションに応用できる.
しかし,氷上かつ広大なリンクという特殊な環境で,競技を妨げることなくストーンの位置を認識することは難しい.
3.2 情報の可視化と共有
競技情報を収集して解析した結果は,我々が仮説検証や知見獲得のために考察の対象とするのはもちろんだが,競技者へフィードバックして戦術立案の参考にしてもらうことや,戦術・戦略トレーニングに活用してもらうことが前提となる.
そのためには,解析結果は一見して直感的に理解できるように可視化されていることが望ましい.この課題に答えるためには,解析結果は可能な限りグラフ化やアニメーション化するようなインタフェースを備える必要がある.
競技情報は,複数の端末や場所で収集されることが想定される.収集する情報は,クラウド環境を活用して共有することで,収集効率を飛躍的に向上させることができる.また,共有することでより大規模な情報として扱うことができるため,解析時の効率や有意性も向上する.たとえば,日本で開催されるすべての大会の試合情報を共有できれば,任意の試合情報や解析結果をオンデマンドで参照できるカーリング試合ビッグデータを構築できる.これを日本の各チームが活用して戦術・戦略トレーニングを行えば,日本全体の戦術・戦略レベルを向上させることに貢献できる.また,収集した試合データベースをAIに学習させて高度な戦術・戦略推論に繋げることも可能となる.
一方で,これらの情報共有は慎重に行う必要もある.一般に,競技者は自身や自チームに関する情報を開示することを嫌う傾向があるし,若手競技者の成長可能性が阻害されるような活用を防止する配慮も必要である.
3.3 AI,認知科学との連携
前述したようにカーリングは「氷上のチェス」と呼ばれ戦術性が高い競技である.AIの観点からもカーリングは興味深い研究対象になっている.
AIの研究自体がチェスの強いプログラムを作ることから始まった.1950年前後にTuringやShannonがコンピュータにもチェスが指せるという論文を出したのがAI研究のスタートである.ゲームはルールが明確であること,勝ち負けによって評価が(人間の手が入らずに)できること,(参考にしたり目標にしたりできる)強い人間プレイヤが存在すること,それ自体が面白いことなどの理由でAIの研究対象として重宝されている.チェスはゲーム理論的に2人・有限・零和・完全情報・確定ゲームに分類される.世の中にこのタイプのゲームが多い(五目並べ(連珠),チェッカー,オセロ,将棋,囲碁が含まれる)こと,ゲームの中では比較的コンピュータにとって扱いやすいことなどの理由で長い間このタイプのゲームが研究対象のメインになってきた.
AIの研究が進んで1997年のチェス,オセロから2017年の将棋,囲碁と人間の最強プレイヤにAIが勝つようになった.2人・有限・零和・完全情報・確定ゲームは強いプログラムを作るという観点からは研究対象としての役割を終えたと言える.研究対象は3人以上,非零和,不完全情報,不確定のいずれかの性質を持つゲームに移っている.たとえば麻雀,(多人数)ポーカー,人狼などである.
カーリングはAIから見ると新しい研究対象のゲームの1つである.2人,有限,令和,完全情報という性質はチェスなどと同じ(カーリングは4人ずつ合計8人でプレイするが4人で1チームという意味で2人ゲームである)であるが,不確定という特徴を有している.ゲームで不確定というと一般にはサイコロを振ることになる(たとえばバックギャモンがそうである)が,カーリングにおける不確定性はそれよりもはるかに複雑である.スポーツなのでボードゲームと違って思ったところにストーンを必ずしも持っていくことができない.戦術としてここにストーンを置きたいと思っても置ける保証はない(ゲームとしては指したい手が必ずしも指せないことに相当する).その理由としては選手の技術(ショットおよびスウィーピング),選手の体力,アイスコンディションなどが複雑に絡み合っている.このような複雑な不確定性を有するゲームとしてカーリングはAIの研究対象として価値が高い.他の性質は同じなので不確定性の扱いに焦点を当てられることは重要である.世の中の実問題の多くは複雑な不確定性を有するので,カーリングのAIの研究はそれらの実問題の解決につながることが期待される.
カーリングの戦術・戦略を理解するためには,競技者が実際にどのような思考過程を持って戦術・戦略を立案しているかを考える認知科学的研究が必要となる.カーリングに関する認知科学的研究は,大別すると以下の2つのアプローチが考えられる.1つは,プレイヤの認知過程を明らかにする研究,もう1つは,上述のようなさまざまな技術が人間の認知に与える影響に関する研究である.前者の研究は,AIの情報処理モデルを考える上で重要な意味を持ち,後者の研究はAIと人間の共存という意味でもAIとの関連は深い.この分野の詳細については後述する.
カーリングの戦術・戦略を立案できるAIが実現し,これを実行するロボットが実現できれば,応用範囲は大きく広がる.たとえば,ストーンの個体特性の確認(ストーンチェック)やデリバリ,スウィーピングのトレーニングといった競技者の支援が容易となるほか,氷の状態や摩擦係数の変化の解明といった研究やアイスメイキング(氷を作る作業)における氷の状態確認にも有効であろう.さらには,人間とロボットの対戦の実現可能性も期待できる.
4.戦術支援のための技術
本章では,第3章で述べた考え方に基づいてプロジェクトが手がけてきた支援技術について述べる.
4.1 デジタルスコアブックiCE
3.1節で述べたとおり,カーリングでは試合情報の記録,記録した情報の分析,分析結果の可視化といった処理を自動化することは有益である.
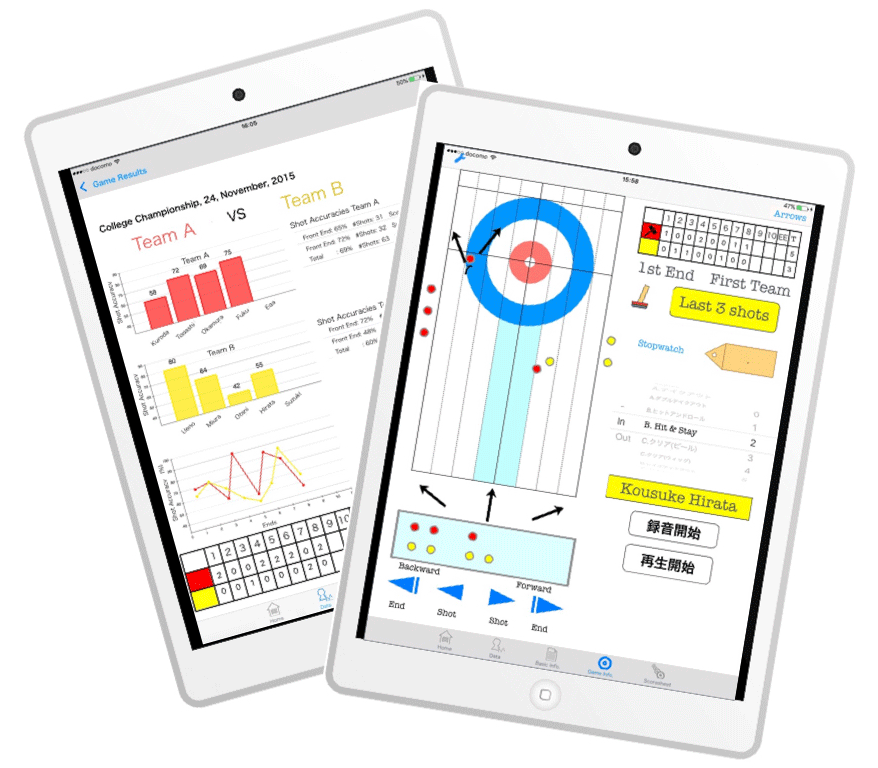
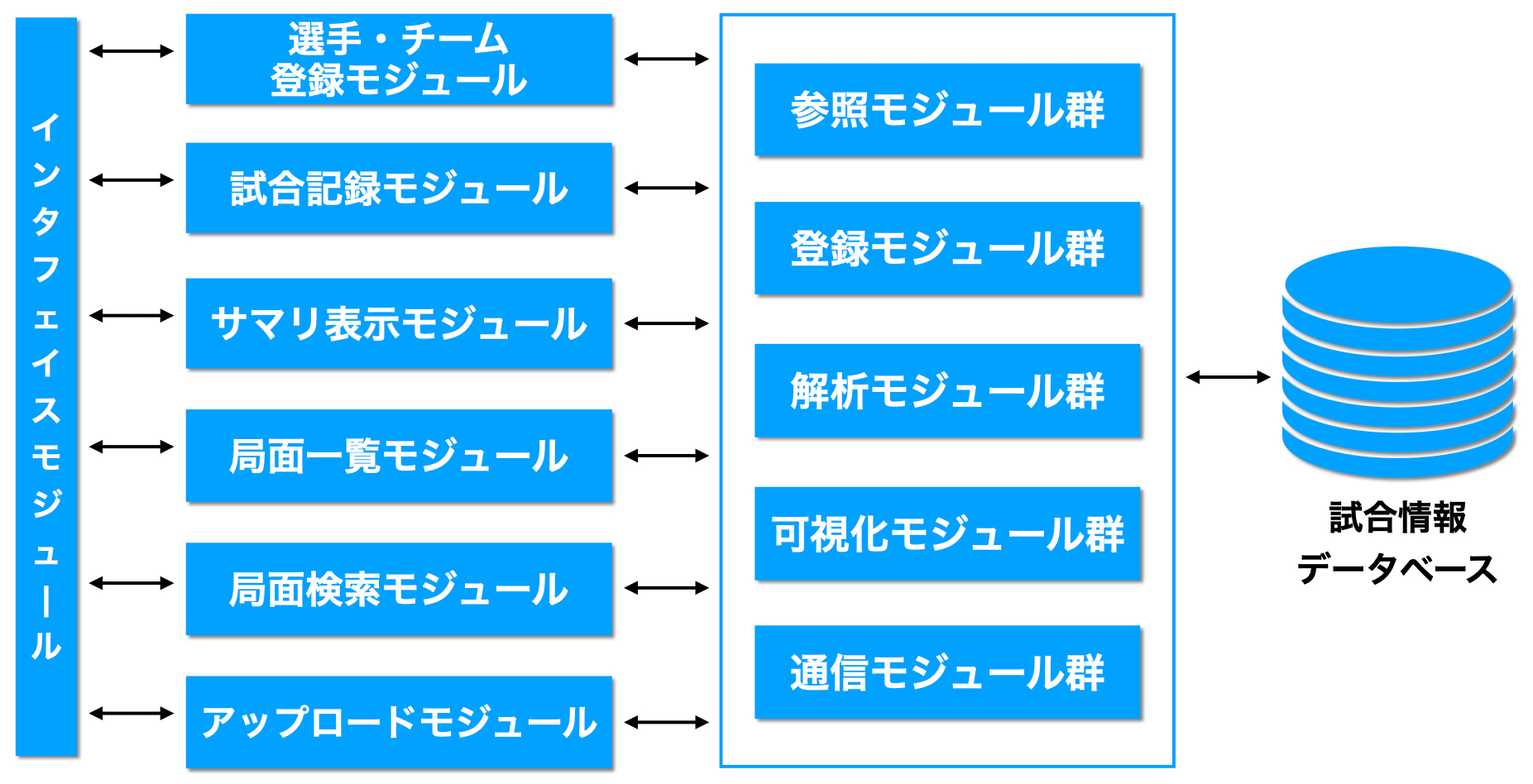
桝井らは戦術要素を電子的に記録する手段として「デジタルスコアブックiCE」を開発し[10],さらに類似局面検索モジュールとアップロードモジュールを実装して機構向上を図った.図2にiCEの稼働画面を示す.このシステムはタブレット端末上で稼働し,5つの主要モジュールと試合情報データベースから構成される(図3).主要モジュールの概要は以下のとおりである.
- (1)選手・チーム登録モジュール:試合の基本単位となるチームや選手名を登録する.チームと選手は独立して管理されるため,選手の移動にも対応できる.
- (2)試合記録モジュール(図2右): 試合の推移を逐次記録するメインモジュールであり,ショットごとのショット種類や回転方向,ショットスコア,ショットによって変化したストーン配置などを記録する.記録後に各局面を参照することもできる.
- (3)サマリ表示モジュール(図2左):記録された情報を解析してチームや個人のショット成功率とそれらの推移をグラフや表形式で可視化表示する.
- (4)局面一覧モジュール: ショットごとの局面の変化を一覧表示する.
- (5)類似局面検索モジュール:指定した任意のストーン配置と類似した局面を試合情報データベースから検索する.検索結果には,その局面が試合中のどの時点で発生したか(エンド),先攻後攻のどちらだったのか,どのショットを選択したか,選択ショットの勝率が提示される.
- (6)アップロードモジュール:試合情報データベースの内容をプロジェクトが管理するクラウドサーバにアップロードする.
システムはObjective-Cで実装されており,データベースはSQLiteを採用している.データベースは他の支援技術と共有することを想定して設計されている.
桝井らは,エキスパートによるiCEの試用とフィードバックに基づいてシステムの改良を進め,一定の実用性を確認している.そして,希望するカーリングチームに無償で提供しており,現在までに延べ18チームへの配布実績がある.各チームでは,スコアブックとして活用されている他,振り返りミーティング資料としての活用事例や戦術スキル向上のためのケーススタディ教材としての活用事例がある.
このほか,筆者らは試合情報データベースの拡充と記録した試合を対象とした独自の分析も進めている.
試合情報データベースには,日本選手権や世界選手権といった日本や世界トップレベルの試合を中心として,地方大会や市民リーグの試合情報も収集されており,現在までに992試合(約20,000ショット)の情報をデータベース化が完了している☆3.
さらに,桝井らはデータベース化された試合情報を対象として戦況に関する詳細な分析をしている[11].彼らは,ショット成功率,得点力,ショット種別を中心に,チームごと,ポジションごとのほか,試合ごと,エンドごとの傾向,それぞれの相関関係などを分析し,従来経験的にのみ知られていた戦術ノウハウのいくつかを客観的に検証したほか,これまで知られていなかった新たな知見を発見している.たとえば,ショットの精度と得点力の関係にはおおむね強い正の相関が認められることが確認できた(ショットの精度が相手に優っていれば勝てる可能性が高い).しかし,その関係に影響を及ぼす要因は競技レベルによって異なることも分かった(日本選手権レベルではショット精度差の影響が強いが,世界選手権レベルでは戦術・戦略の差の方が影響する.大学選手権レベルではミスショットやラッキーショットのランダム要因の影響が強い).
最近は日本選手権などの国内トップレベルの公式大会の試合がテレビ中継されている.実況放送においては,アナウンサーが解説者との間で話題のきっかけを作り,また視聴者が試合状況を把握し易くするために,チームや個人のパフォーマンスを示す統計情報への需要が存在し,この需要に答えるためにはiCEを活用した試合情報分析が役立つことが分かった.そこで,実況される公式試合を対象として逐次試合情報を収集解析し,チームショット率やポジション別ショット率といった情報をリアルタイムで提供している.
このほか,市民リーグ会場にてiCEによる試合情報記録の模様を公開することでデータ分析の有用性と試合観戦の新しい観点を示し,iCEの利用講習会を開催するなどして,支援技術の普及促進にも注力している.
4.2 カーリングストーンのための実時間位置計測
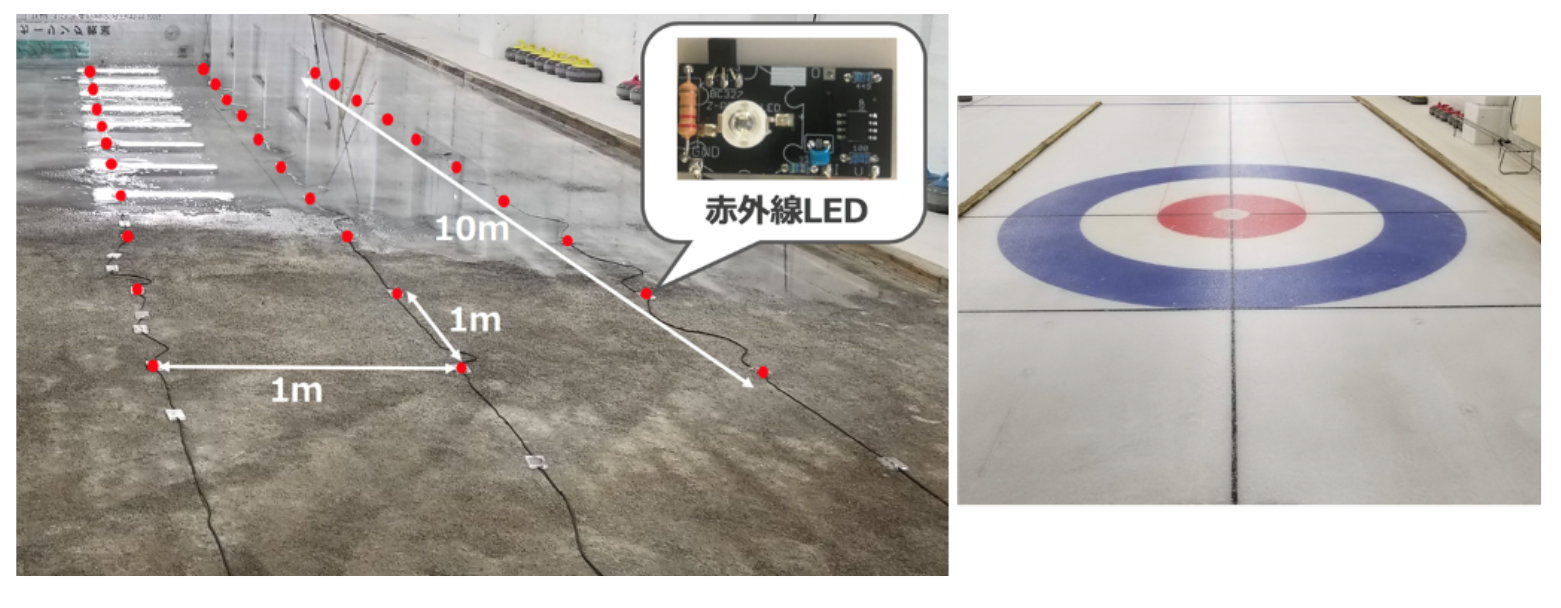
竹川らは,リンク上およびストーン上に赤外線LEDを搭載し,リンクの周辺に設置した赤外線カメラによる画像処理により位置計測を実現した[12].ストーン上に設置する赤外線LEDモジュールは,小型でストーンそのものの挙動を妨げない.また,アプリケーションおよび競技者のスキルにより,求められるストーンの位置計測精度は異なる.赤外線カメラを増やすことでストーンの位置計測精度を柔軟に制御できる.
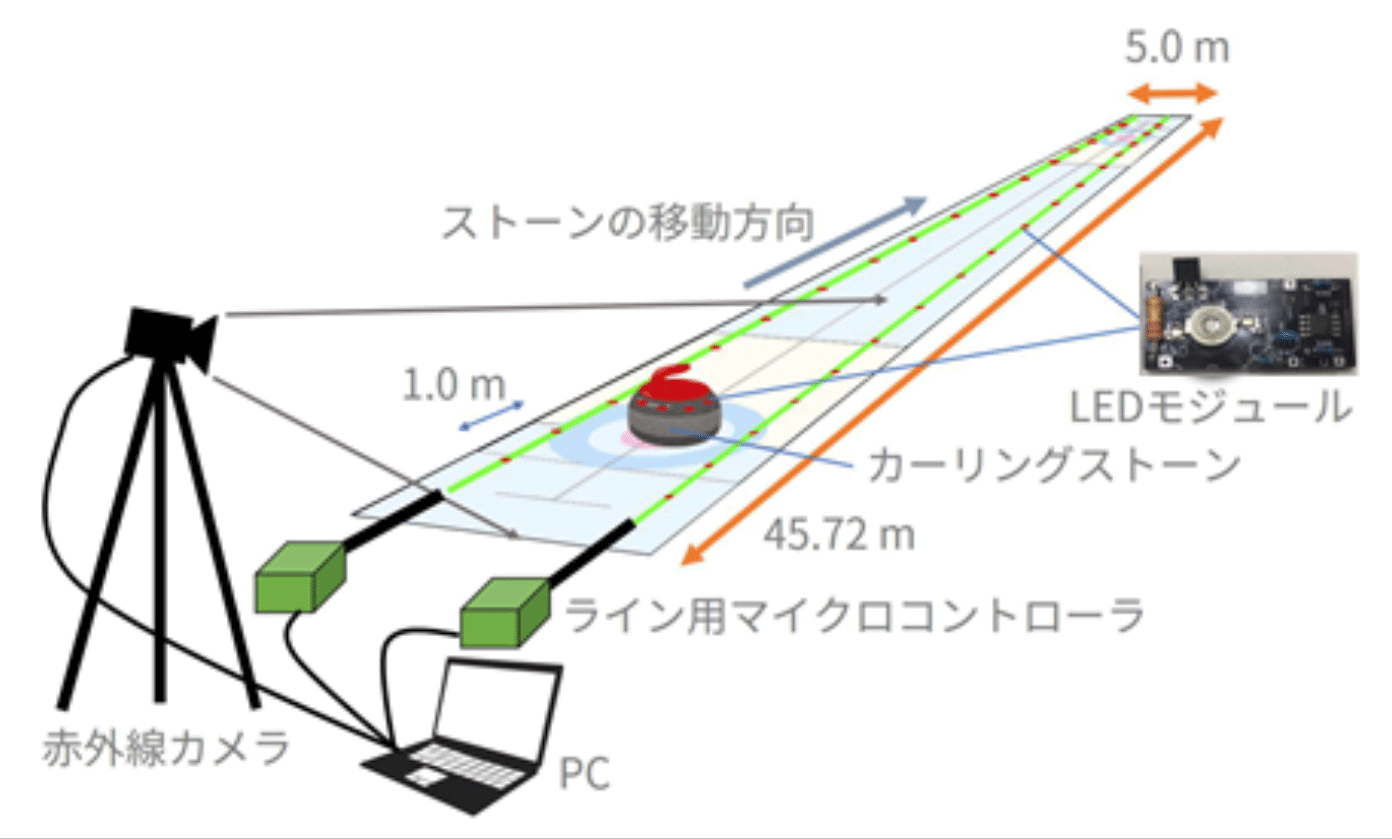
システム構成を図4に示す.提案システムは赤外線カメラ,PC,ライン用マイクロコントローラ(以降,ライン用マイコンと呼ぶ),ストーン用マイクロコントローラ(以降,ストーン用マイコンと呼ぶ),赤外線LEDライン(以降LEDラインと呼ぶ),赤外線LED点灯制御モジュール(以降,LEDモジュールと呼ぶ)から構成される.ストーン用マイコンはストーン上にあるLEDモジュールの点灯・消灯および光量を制御する.また,LEDラインはデイジーチェーン形式で接続されたLEDモジュールから構成される.ライン用マイコンはLEDライン上の各LEDモジュールの点灯・消灯および光量を独立に制御できる.ライン用マイコンおよびストーン用マイコンは,PCと通信する.PCは赤外線カメラ映像の画像処理結果をもとに,各種マイコンに制御コマンドを送信する.赤外線カメラはリンクの周囲に自由に設置できるが,スィーパはストーンの左右あるいは進行方向側にいるため,図4に示すようにストーン進行方向の反対側に設置する方が望ましい.また,使用する赤外線カメラには可視光除去フィルタを取り付ける必要がある.
カメラ画像上の各画素と,リンク上の位置の対応関係を構築するためのキャリブレーションを実施する.キャリブレーション後,ストーンの位置をカメラ映像からリアルタイムに推定する.
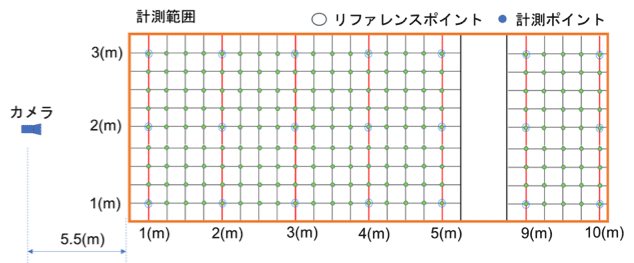
河西建設カーリングホール(北海道北見市)にて提案システムを用いた位置計測精度の評価実験を実施した.図5(左)に氷を張る前のカーリングリンクに設置したLEDラインを示す.図5(左)にシートや氷を敷設した状態を図5(右)に示す.LEDモジュールは縦方向1m間隔で9m分,横方向1m間隔で2m分を設置した.図6に示すように,赤外線カメラは,リンクの端から約5.5m手前に設置し,リファレンスポイントは33地点,計測ポイントは333地点とした.実測値と計測値の平均誤差は0.10m,標準偏差0.04mであった.これはストーンの大きさ(0.30m)以下の精度であるが,たとえば,ショットの良し悪しを判断する基準には「0.15m以内」「0.05m以下」といったものもあり,十分に実用的な性能を確保するために,複数カメラによる連携,慣性センサの導入などを検討している.
4.3 戦術・戦略のシミュレーション
カーリングというゲームが,不確定ゲームであり戦略性の高いゲームであることは前述のとおりであるが,その戦略はコーチや熟達者の口伝によるものが多く,あまり科学的な議論は行われてこなかった.その理由として,カーリング場の氷の状態は刻々と変化するものであり,氷を読む技術や正確にストーンをリリースする技術,スイープの能力やスキップの指示など多岐に渡るため,単にストーンの配置だけで議論できなかったという点がある.コーチに求められるのは,ストーンの単純な配置における最適戦略を教えることではなく,プレイヤのスキルを高めることであり,スキルが高くなるにしたがって求められる戦術も変化するので,レベルに合ったゲームプランを身に着けさせることであると言える.
しかし,カーリングを単純に不確定ゲームとして捉えることができれば,ストーンの配置における最も勝ちやすい最善手を求めることができるのではないだろうか.その答えを見つける手段として,理想的なカーリングシートをコンピュータ上で実現し,単純な不確定ゲームの戦略を議論する場を提供できないかと考えて考案したものが,「デジタルカーリング」である.
北清らは,コンピュータ上の物理シミュレーターを利用して,カーリングストーンの挙動をシミュレートするシステムを考案した[13].カーリングのストーンは,時計回りに回転させると右に,反時計回りに回転すると左に曲がる(カールする)ことが知られている.しかし,ストーンの並進速度とカールの度合い(カール比),回転の角速度とカール比の関係については正確な測定が行われてこなかったため,長年の謎とされてきた.また,氷上でストーンがカールする物理的メカニズムについても,完全に解明されていない.2017年以降に発表された前野らによる研究で徐々に明らかになってきており,今後の精密な測定が待たれる[14].
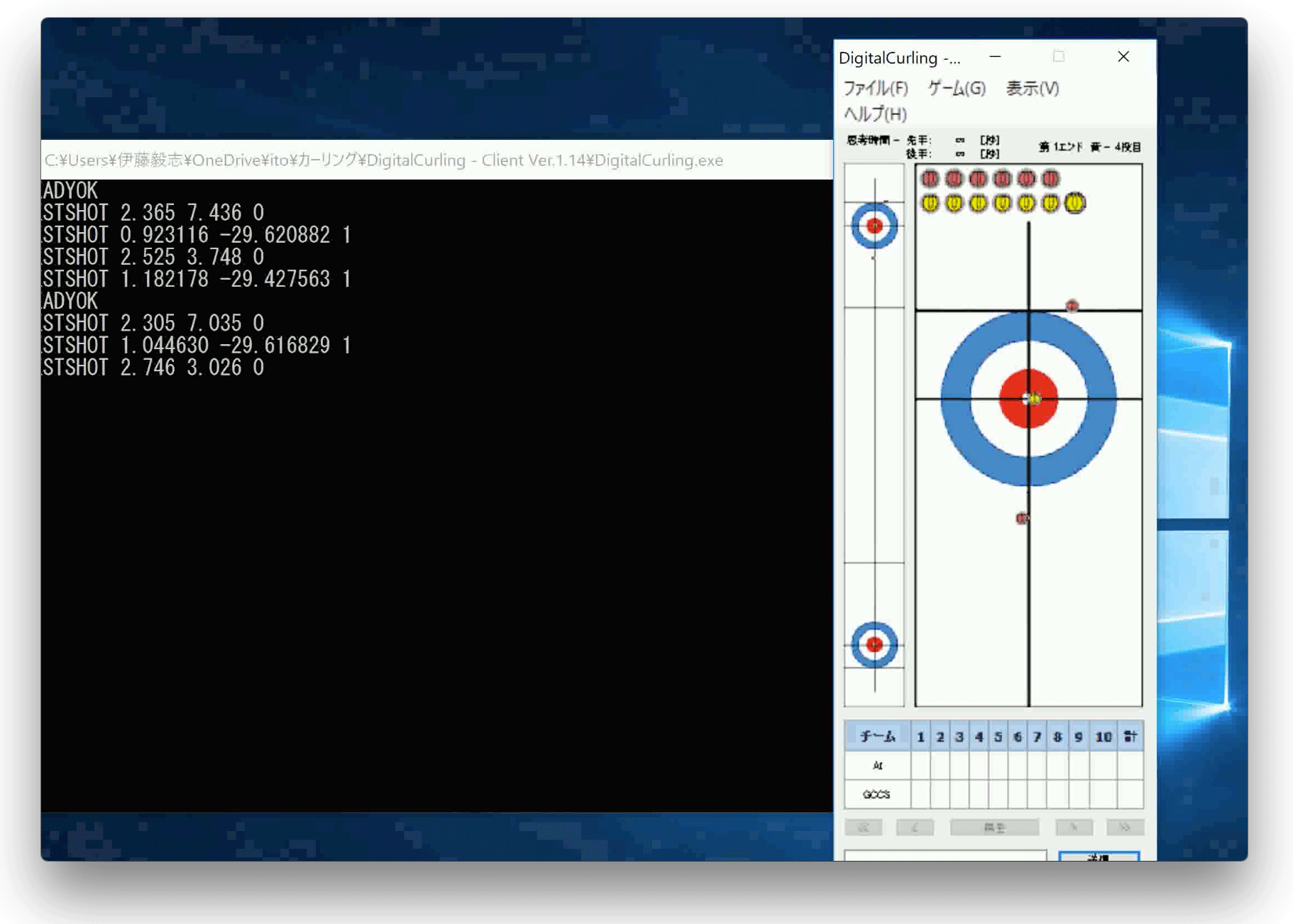
北清と伊藤は,問題を簡単化するために,ストーンの並進速度と角速度によるカールに加わる力を一定と考えた単純な物理シミュレーターを考案し,そのシミュレーターを「デジタルカーリング」と名付けて公開した(図7)[15].デジタルカーリングでは,プレイヤの技量や氷の状態によって生じる不確定性をショットの初速度に正規乱数を加えることで実現している.このシミュレーターを広く公開し,統一されたカーリングシート上で戦略だけを議論できる場を提供した.さらに,このシミュレーター上で動作するAIの大会を開催することで,カーリグ戦略を人工知能の研究分野として切り拓くことに寄与してきた[16].その結果,モンテカルロ木探索を用いたAIや評価関数の機械学習を用いたAI,深層学習を用いたAIの開発など,多くの人工知能研研究が行われるようなっている.さらに,このシミュレーターをベースとした学習支援システムの提案も行われてきた[17].
しかし,上述のようにストーンの挙動を単純にしたことにより,熟達したプレイヤからは,そのストーンの挙動の再現が不十分で不自然に感じられるという意見も少数ながら得られている.また,実環境のようなカーリング場の特性やプレイヤの技量をコンピュータ上でシミュレートしてほしいという要望なども指摘されてきた.そこで,森と伊藤は,デジタルカーリングの改良に着手した.具体的には,プレイヤの技量に起因するショットの精度やアイスコンディションに伴うカール比やストーンの滑りやすさに対応できるようにストーンの挙動に関連するパラメータを自由に変更できる新しいデジタルカーリングシステムを提案した[18].
4.4 戦術を考えるAI
山本らはカーリングというスポーツを不確定性ゲームとして捉え,ゲーム木探索の手法を取り入れた最善手選択のための手法を開発してきた[19].その際,先に述べた伊藤らによって開発されたデジタルカーリングを用いて,AIがカーリングの戦術を考える.将棋や囲碁などにおけるゲーム木探索においては,局面の良し悪しを判断する局面評価関数の精度が重要となる.山本らはカーリングプレイヤの経験に基づく評価関数を人の手によって作成し,ゲーム木探索のミニマックス手法による最善手探索と組み合わせることで強いAIの開発を行った.
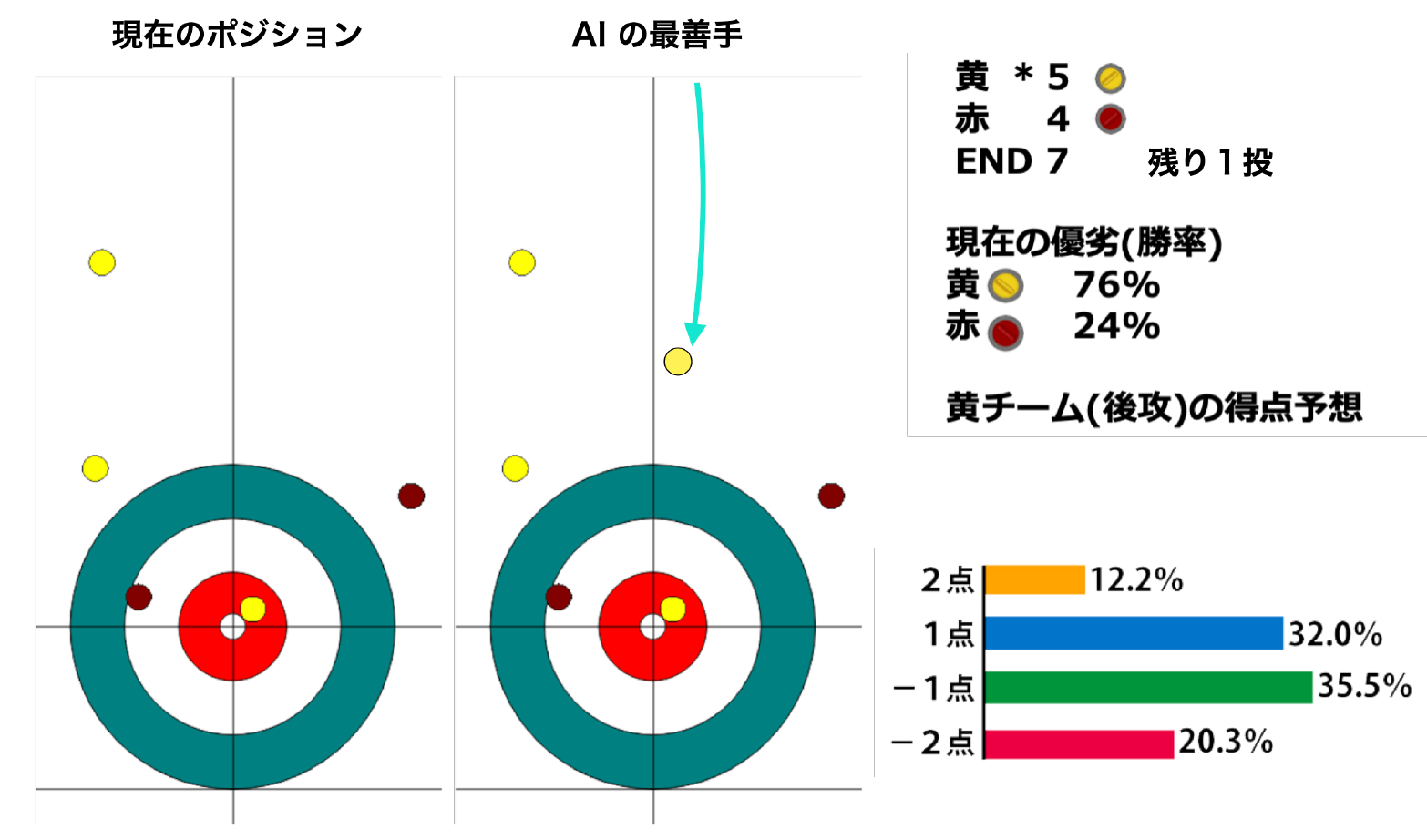
その後,彼らは評価関数を深層学習によって自動的に獲得する試みを行った[20],[21].そこでは,まず,エンドの最終投球前の局面に対して,期待得点を最大化するショットを探索し,そのショットを何度も投球した際の,期待得点分布を求めて,局面と期待得点分布のペアを数万〜数十万局面用意し,得られた期待得点分布を教師信号とした深層ニューラルネットワークの誤差逆伝搬法によって学習を行う.その結果,最終投球前の局面の評価を行うニューラルネットワークモデルNN1が構築できる.次に,残り2投の局面について,投球後の局面をNN1で評価した結果に基づき,期待得点が大きくなる最善手を探索して,同様に局面とその際のNN1の評価値(期待得点分布)のペアから,残り2投の局面を評価するニューラルネットワークモデルNN2を構築し,同様にNN15までの構築を繰り返すことで,局面評価関数の自動生成を行った.特に,局面評価関数が期待得点分布で構築される点は重要である.カーリングは,一定のエンド数をプレイして,総得点を競うスポーツであるため,残りエンド数に対して得点差が大きくなることで期待勝率が小さくなると考えられる.残りエンド数と得点差に応じた期待勝率を表したテーブルを勝率テーブルと呼ぶことにすると,各局面の期待得点分布と勝率テーブルを組み合わせて使用することでその局面での期待勝率を計算できる.また,任意の局面を評価する際,そのエンド終了時にどういった得点分布になるかという情報は,プレイヤの戦術支援に役立つと考えられる.カーリングAIはモンテカルロ木探索を用いた他の手法も提案されているが,期待得点分布が得られないため,戦術支援という観点からより優れていると考えられる(図8).
4.5 その他の取り組み
カーリング競技においては,ストーンを放つデリバリ技術とストーンの前方表面をブラシで擦るスウィーピングの技術が重要である.リンク表面にはペブルが形成されており,スウィーピングを行うことによってペブルの摩擦係数が変化し,ストーンの速度や方向を制御することが可能となる.スウィーピングの良否は競技の勝敗に大きく影響し,ストーンを目的の位置に近づけるために,全力でスウィープを行うことも多い.したがって,スウィーピング力とフォームとの関係やストーンの挙動を定量的に明らかにすることはスウィーピング技術の向上を図る上で有効と考えられる.しかしながら,これまでにスウィーピング力を測定・解析し,選手のトレーニング支援を図る技術の整備は進んでいない.
宮越らは,市販のカーリングブラシを改造することで,スウィーピング動作時のブラシの動きを前後方向,水平方向,ねじり方向に分けて測定し,スウィーピング力の測定ができるポータブルなロードセル内蔵型のブラシヘッドを開発した[22].
測定装置を用いてスウィーピング力測定実験を実施し,装置の実用性能の評価と競技者のスウィーピング力の分析を行った.試作したロードセル内蔵型のカーリングブラシによって,スウィーピング力の簡易計測が可能であることを確認した.スウィーピング動作中の力は,水平力において非対称性が強く現れること,氷上をストーンとともに移動することで,選手のスウィーピング力は大きく低下することを明らかにした.
伊藤らは,3.3節で述べたような認知科学的研究に着手している.彼らは,カーリング経験の違う被験者群に対して,カーリングの熟達者の監修のもと作られたカーリングの次の一手問題を見せて,次のショットを考えさせる実験を行った[23],[24].その結果,将棋の研究の結果と同様に,経験豊富なグループほど先の局面を読むことが分かってきた.しかし,将棋の研究では上級者になると候補手が減少する傾向が見られたのに対して,カーリングでは中級者と上級者で大きな差は見られないことも分かってきた.
また,スキップの経験がある選手ほど,先を読み,多くの候補手を挙げる傾向があることも分かってきた.これらの結果は,不確定要素を含むカーリングでは,より深く読んで多くの可能性を考えられることが重要な意味を持つことが示唆される.カーリングでは必ずしも狙ったとおりのショットが実現されない.ミスショットをしてもその被害を最小限にするようにスウィープで導くことがある.(このようなショットを「Bプラン」と呼ぶ)ゲームの戦略を主に考えて他のプレイヤに指示を出すスキップは,このようなショットを常に考える必要があり,そのため,広く深い可能性を考える必要があるのではないかと考えられる.
これらの実験は,1人のプレイヤに対する次のショットを考えさせるものであったが,実際のカーリングでは,氷のコンディションやプレイヤの得意ショットなどの技量も考慮して4人のプレイヤが情報を交換しながら次のショットを考えていく.今後の課題としては,チームとしての合意の形成過程や個々のプレイヤの技量と選ばれるショットの関係などの実環境における意思決定過程に関する研究の必要があるだろう.
一方,賢くなったカーリングAIを用いた学習支援や思考支援システムの工学的アプローチの研究や,それらのシステムにより,人間の思考がどのように変化していくのかを調べる認知科学的アプローチの研究も考えられる.技術的な支援の手法としては,Higuchiらの学習支援に応用する研究[17]や山本らの強いAIを用いて,期待勝率をテーブルで表す手法などが提案されている[20].これらの研究は,まだ緒についたところであり,効果的なAIの可視化方法や具体的な思考支援への応用はまだ十分に行われておらず,今後の研究の進展が期待されている.
河村らは,デリバリ(ストーンを投げる)を正確に再現することを目指して,図9のようなデリバリロボットを開発している[25].ロボットは,回転付加機構によってストーンに回転を加えながら投球板で押し出し,デリバリ動作を実現する.これまでロボットが,任意の速度,回転速度のデリバリを一定の誤差範囲で繰り返し再現できることを確認し,ロボットによるストーン毎の癖(曲がり方の個体差)の計測を実現している.
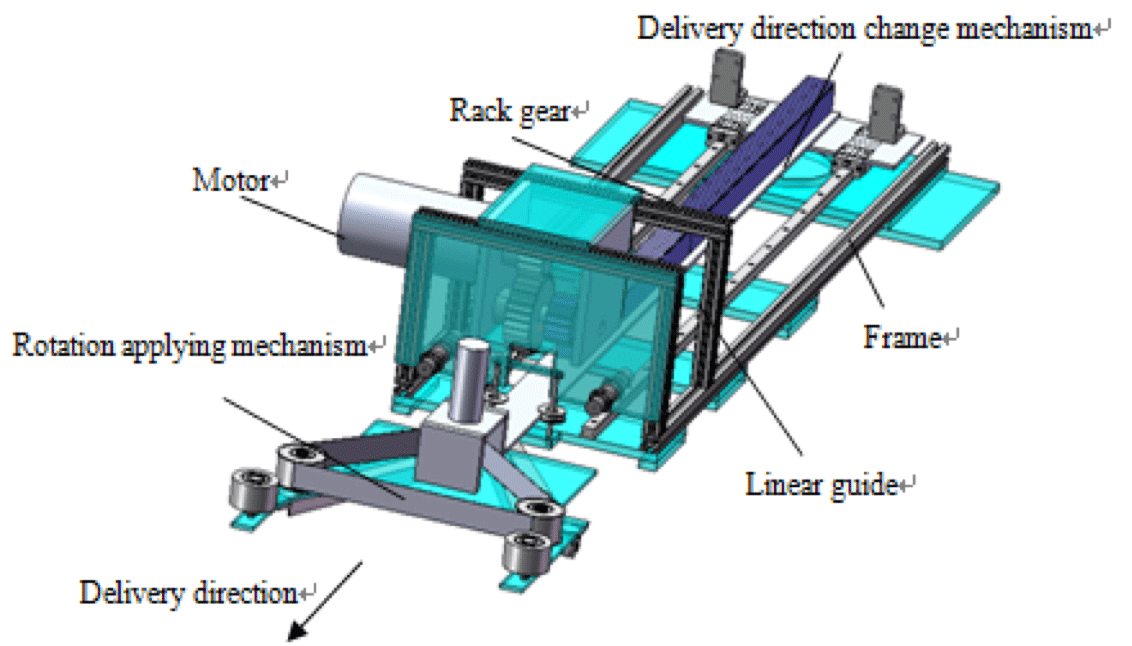
彼らは,開発したロボットを用いて人間の競技者との対戦実験も実施し,対戦ログを解析することでロボットを制御するために必要なパラメータや精度について考察しているが,実際のデリバリを行うことでストーンの速度や軌道および停止位置の精密な測定とカーリングシートの幾何学的な形状計測と摩擦係数の分布の理解が不可欠であること,およびロボットを制御する高度な戦術・戦略立案機構が必要であることが明らかになった.これらの課題は,本プロジェクトで開発しているストーンの実時間位置計測技術や戦術推論AIとの連携によって実現できる見込みである.
5.次のステップへ向けて
本稿では,カーリングの戦術・戦略面を支援することを目的として,「カーリングを科学する」研究プロジェクトが手掛けている情報通信技術(ICT)に基づく支援技術開発研究について述べた.競技情報の収集,解析,可視化,共有を組み合わせて開発してきたデジタルスコアブック,カーリング実時間計測,戦術・戦略シミュレーション,戦術推論AIなどの開発状況について報告した.
手探りの状態から研究をスタートし,いくつかの技術の開発とそれらの有効性と実用性を検証するに至ったのは,我々の研究をご理解下さった日本カーリング協会,北見カーリング協会,河西建設カーリングホール,アドヴィックス常呂カーリングホール,その他競技者および関係者各位の協力がなければ到底なし得なかった.
しかし,実現できた技術にはまだ解決すべき課題も多く,実現に至っていない技術も残されている.研究プロジェクトの活動は現在も継続中である.2020年10月には北見市内に新しいカーリングホール(アルゴグラフィクス北見カーリングホール)がオープンする☆4.同施設には研究設備が設けられ,研究目的の利用にも開放される予定である.同研究設備の一部には本プロジェクトの研究成果が応用されており,今後のカーリング支援研究の発展に寄与するだけでなく,我々の研究計画も加速されると期待できる.研究プロジェクトとしては,これまで開発してきたそれぞれの技術を精緻化するとともに,各技術を結合して,測定,記録,解析,推論,動作といった一連のタスクを自動化することで,シームレスかつオンデマンドなリアルタイム分析環境を構築し,北京オリンピックに向けた競技者やチームへの貢献を目指したい.
以下,具体的な取り組みについて述べる.
ストーン位置計測技術のアプリケーションの1つとして,リンク,デジタルスコアブックなどにリアルタイムなショット軌跡表示が考えられる.プロジェクションマッピング技術を用いて,リンク上にショット軌跡を投影する.また,ストーン位置計測結果を入力とし,機械学習アルゴリズムを適用することで,ストーン位置を推定できる.ショット軌跡にあわせて,未来の軌跡を表示することで,練習中における戦術支援や学習支援に応用できる.
今後は,竹川らが行うストーンの正確な挙動の実測値になるべく近いカールを実現することと,桝井らが開発しているiCEによって記録されたショットのデータを読み込んで,コンピュータ上で視覚的に再現できるようなデジタルカーリングを実現することが期待されており,その実現を目指していきたい.
山本らが開発しているカーリングの戦術支援を行うカーリングAIの応用は,単に任意の局面に対しての最善手を求めることができるというだけではない.たとえば,候補となる2つのプレイを期待勝率や期待得点分布を見ることで,その局面をAIがどのように評価をしているかを可視化することができる.特に,リスクヘッジが重要なカーリングでは初心者などへの戦術支援に特に重要となるであろう.
また,デジタルカーリングでは投球の不確定性を乱数によって実現しているため,同じ局面で同じプレイを選択しても必ずしも同じ結果が得られるとは限らない.たとえば,ある局面における最善手を求めたところ,勝率が65%であった場合,これは,その投球を行っても実際の結果を評価すると,54%となる局面になったり,70%となる局面になったりすることを意味する.実際に,投球前に65%の見積勝率だった局面で,投球後に70%となったとすると,その投球が素晴らしいものであったことを示しており,投球(プレイ)の評価ができる可能性を示唆している.こういった応用を見据えて,プレイヤが容易に利用できるアプリ化や実際のカーリングのプレイデータとの整合性の検証などを行っていく予定である.
参考文献
- 1)Gorski, C. : Curling Science, Success This Slick Sport Requires Intense Physical Effort and Concentration, INSIDE SCIENCE NEWS SERVICE, http://www.insidescience.org/ (2010)
- 2)Beneventano, P., Berger, P. D. and Weinberg, B. D. : Predicting Run Production and Run Prevention in Baseball : The Impact of Sabermetrics, International Journal of Business, Humanities and Technology, Vol.2, No.4, pp.67-75 (2012).
- 3)Ikuta, Y., Matsuda, Y., Yamada, Y., Kida, N., Oda, S. and Moritani, T. : Relationship Between Decreased Swimming Velocity and Muscle Activity During 200-m Front Crawl, ARTICLE in ARBEITSPHYSIOLOGIE, Vol.112 (9), pp.3417‐3429 (2012).
- 4)廣津信義,伊藤雅充,宮地 力,濱野光之,田口 東:ゲーム理論を応用したバレーボールの戦術分析プログラムの開発,順天堂スポーツ健康科学研究,No.1, Vol.1, pp.78‐88 (2009).
- 5)Shegelski, M. : The Motion of a Curling Rock : Analytical Approach, Canadian Journal of Physics, Vol.78, pp.857‐864 (2000).
- 6)Maeno, N. : Curl Mechanism of a Curling Stone on Ice Pebbles, Bulletin of Glaciological Research, Vol.28, pp.1-6 (2010).
- 7)Behm, D. G. : Periodized Training Program of the Canadian Olympic Curling Team, Journal of National Strength and Conditioning Association, Vol.29, No.3, pp.24-31 (2007).
- 8)田中良幸,坪田広明,武田雄策,辻 敏夫:仮想カーリングシステムを用いた人間の手先運動特性の解析,1A1-3F-E1, 日本機械学会 (2006).
- 9)伊藤毅志,桝井文人,宮越勝美,河村隆,山本雅人,竹川佳成,柳 等,松原仁:カーリングを科学するプロジェクト,信学技報,CNR2015-2, pp.5-10 (2015).
- 10)Masui, F., Hirata, K., Otan, H., Yanagi, H. and Ptaszynski, M. : Informatics to Support Tactics and Strategies in Curling, International Journal of Automation Technology, Vol.10, No.2, pp.244-252 (2016).
- 11)Masui, F., Otani, H., Yanagi, H. and Ptaszynski, M. : Study on Game Information Analysis for Support to Tactics and Strategies in Curling, Sport Science Research and Technology Support. icSPORTS 2016, icSPORTS 2017. Communications in Computer and Information Science, Vol.975. Springer, Cham, Vol.975, pp.128-149 (2019).
- 12)Takegawa, Y. : Proposal of a Real-time Position Measurement System for Curling Stones, Proceedings of Workshop on Curling Informatics, pp.10-11 (2018).
- 13)北清勇磨,伊藤毅志:カーリングの戦略を支援するシステムの提案と構築,第18回ゲームプログラミングワークショップ予稿集,pp.1-8 (2013).
- 14)服部一裕,栗山寛子,前野紀一:画像解析を用いたカーリング・ストーンの運動解析-ストーンのカール比の追跡―,日本機械学会シンポジウム,スポーツ工学・ヒューマンダイナミクス2017 (2017).
- 15)北清勇磨,岡田雷太,伊藤毅志:デジタルカーリングサーバーの提案と紹介,情報処理学会ゲーム情報学研究会報告,GI-31(2), pp.1-5 (2014).
- 16)伊藤毅志,森健太郎:デジタルカーリング大会報告2015年度,情報処理学会ゲーム情報学研究会報告,GI-36(2), pp1-6 (2016).
- 17)Higuchi, T., Mori, K. and Ito, T. : An AI-Assisted Strategy Learning Support System Using Digital Curling, Workshop on Curling Informatics 2018, pp.21-25 (2018).
- 18)森健太郎,伊藤毅志:条件の変更にロバストなデジタルカーリングの改良,情報処理学会論文誌,Vol.60 (11), pp.2085-2092 (2019).
- 19)加藤 修,飯塚博幸,山本雅人:不確定性を含むデジタルカーリングにおけるゲーム木探索,情報処理学会論文誌,Vol.57, 第11号, pp.2354-2364 (2016).
- 20)山本雅人,伊藤毅志,桝井文人,松原 仁:カーリングとAI,情報処理学会誌「情報処理」,Vol.59, 第6号, pp.500-504 (2018).
- 21)Ataka, K., Noguchi, W., Iizuka, H. and Yamamoto, M. : Learning of Evaluation Function in Digital Curling Considering the Probability of Scores at Each End, AAAI20 Workshop, Artificial Intelligence in Team Sports, pp. 1-6 (2020).
- 22)宮越勝美,柳 等,桝井文人,上村亮我,岸田 卓:カーリングにおけるスイープ力測定装置の開発,日本機械学会北海道支部第54回講演概要集,pp.25-26 (2016).
- 23)伊藤毅志,板倉貴章:カーリングプレイヤの思考過程の分析,エンタテインメントコンピューティングシンポジウム2015論文集,pp.31-36 (2015).
- 24)Ito, T., Wakabayashi, K. and Matsubara, H. : Thinking Process in the Game of Curling, Workshop on Curling Informatics 2018, pp.16-20 (2018).
- 25)Kawamura, T., Kamimura, R., Suzuki, S. and Iizuka, K. : A Study on the Curling Robot Will Match with Human ‐ Result of End Game with One Human, Proceedings of IEEE-CIG2015 (2015).
脚注
- ☆1 1995年当時,世界カーリング協会やカナダ協会の公式サイトを通じて一部の試合情報のみが公開されていた.日本国内の試合については入手可能な試合情報は存在しなかった.
- ☆2 「カーリングを科学する」プロジェクトhttp://orion.cs.kitami-it.ac.jp/tipwiki/CurlingScience
- ☆3 日本選手権,世界選手権,地方大会・リーグの試合情報の記録に際しては,それぞれ日本カーリング協会強化委員会,世界カーリング連盟,北見カーリング協会の協力を得た.
- ☆4 地域資源カーリングを活用した知名度向上と交流人口拡大のための拠点整備プロジェクト, 内閣官房・内閣府総合サイト https://www.kantei.go.jp/jp/singi/tiiki/tiikisaisei/dai51nintei/plan/a011.pdf (2020)
1990年岡山大学理学部卒業.博士(工学).沖電気工業,三重大学を経て,2018年北見工業大学情報通信系教授/冬季スポーツ科学研究推進センタ長.自然言語処理,知識工学,観光情報学に興味を持つ.
伊藤 毅志(正会員)ito@cs.uec.ac.jp1994年名古屋大学大学院工学研究科情報工学専攻博士課程修了.工学博士.電気通信大学情報理工学研究科准教授.ゲームを題材にした人間の思考過程,熟達化の過程に興味を持つ.著書に「先を読む頭脳」(新潮社,共著)ほか.
松原 仁(正会員)matsubar@ai.u-tokyo.ac.jp1986年東大大学院博士課程修了.工学博士.同年通産省工技院電子技術総合研究所(現産業技術総合研究所)入所.公立はこだて未来大学を経て2020年東京大学教授.専門は人工知能.元本会理事.
竹川 佳成(正会員)yoshi@fun.ac.jp2007年大阪大学大学院情報科学研究科博士課程修了.博士(情報学). 2011年MIT Media Lab. Assistant Visiting Professor.神戸大学経て2014年公立はこだて未来大学准教授.ヒューマンコンピュータインタラクション,エンタテインメントコンピューティング,音楽情報科学に興味を持つ.
山本 雅人(正会員)masahito@complex.ist.hokudai.ac.jp1998年北海道大学大学院工学研究科博士後期課程修了.博士(工学).2012年北海道大学大学院情報科学研究院教授.人工生命/人工知能,特に,ゲーム情報学に興味を持つ.
河村 隆(非会員)kawamura@shinshu-u.ac.jp1992年電気通信大学大学院機械制御工学専攻単位取得退学.博士(工学).1996年イリノイ大学 Visiting Professor.2019年信州大学学術研究院繊維学系教授.メカトロニクス,知的制御,感性ロボティクスに興味を持つ.
柳 等(非会員)yanagi@mail.kitami-it.ac.jp1988年日本体育大学大学院体育学研究科体育学修士課程修了.2020年北見工業大学教授.体育学,スポーツバイオメカニクスに興味を持つ.
編集担当:江谷 典子(Peach・Aviation(株))