IoC : Internet of Cows
―インタラクション分析による放牧牛飼養管理システム―
1.はじめに
日本の農業は多くの問題を抱えている.特に労働力に関しては,より深刻である.農業が基幹産業となっている地方では過疎化が進んでおり,それに伴い,農業従事者の高齢化や後継者不足といった問題が発生している.結果として,労働人口は減少傾向が続いており,表1に示すように2010年には260万人いた労働人口も,2018年には175万人程度まで減少している[1].

一方,「攻めの農林水産業」を展開する中,表2に示すように2014年には81億円であった和牛肉の輸出は順調に増加し,2018年には247億円と約3倍の伸びを示している[2].和牛肉はその品質の高さから,海外の富裕層を中心とした需要も旺盛で,日本でも有数の競争力を持つ農畜産物に育ってきている[3].

このような状況において,最新ICTテクノロジーを活用して現場にイノベーションをもたらそうとしているのがスマート農業である.スマート農業は,飼育管理業務の省力化や,科学的知見にもとづく業務の高精度化を実現しており,さまざまな農畜産物に対して取り組みが行われている.このような技術は,新規参入者に対するハードルの低減や生産効率の向上による競争力の強化に役立てられている.本稿では,放牧牛やパドックで飼育されている牛を対象として我々が取り組んでいる,新たなスマート農業の形であるInternet of Cowsプロジェクトの概要と,その中で開発を行っている放牧牛飼養管理システムについて紹介する.
2.Internet of Cowsプロジェクトの概要
Internet of Cowsプロジェクトは,和牛農家を対象として業務の省力化を目指している.図3に本プロジェクトの概要を示す.
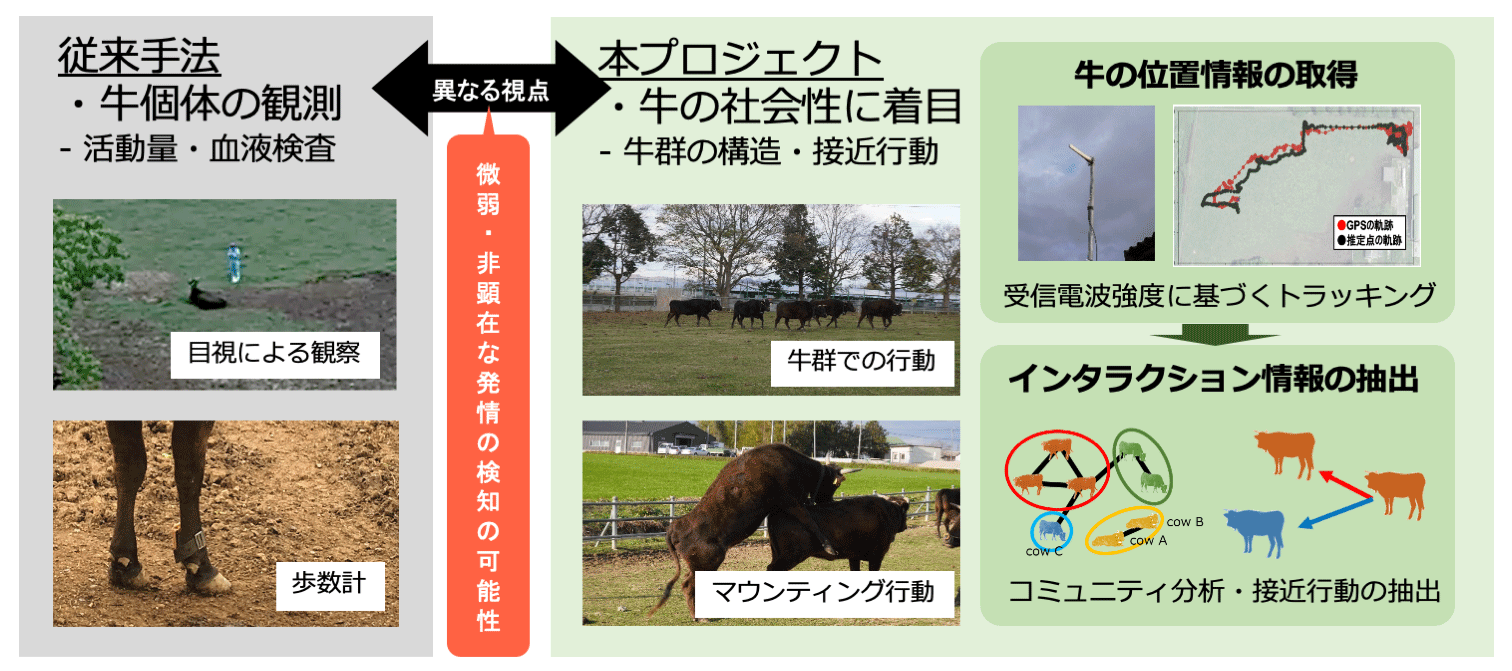
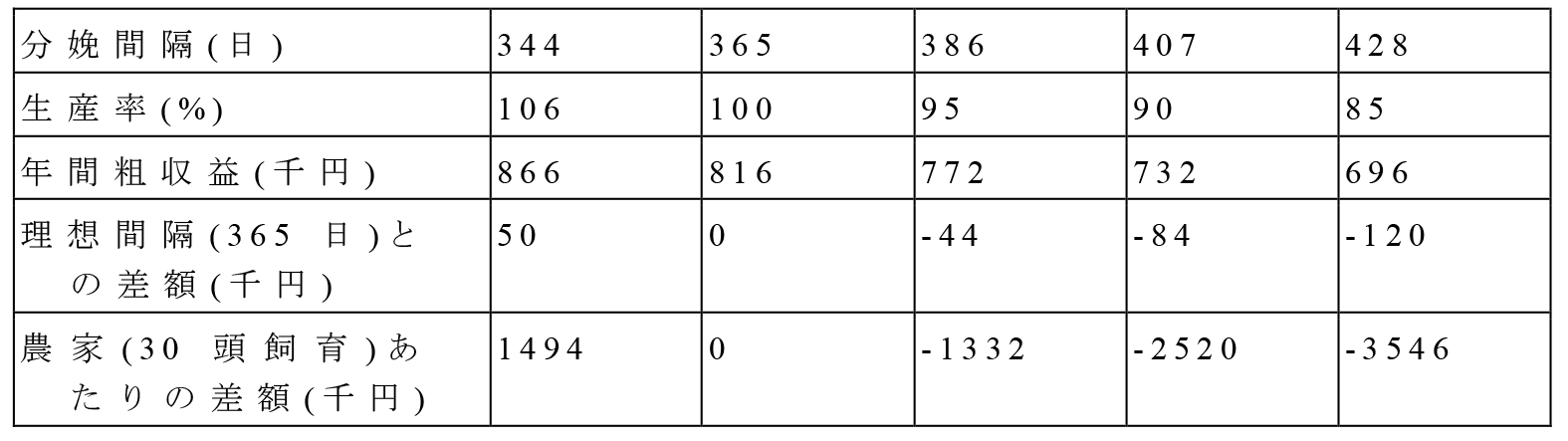
和牛農家の最も重要な業務の1つに繁殖がある.これは,牛の発情期に人工授精を施すことによって行われる.しかし,発情の見極めは,通常,目視による観察を頼りに行われており,この作業には多くの労力とノウハウが必要となる.加えて,牛の発情の多くは夜中から早朝にかけて起こりやすいといわれており,目視による確認では人工授精に最も適しているタイミングを逃す可能性がある.発情の間隔はおよそ3週間であり,発情兆候を見逃したり,人工授精に失敗すると,少なくとも次の発情までの飼育費用が生じるうえに,生産率そのものが低下する.その生産率としては,1年あたり1頭を産むことが理想とされているが,2011年の平均間隔は449日程度となっている[4].これはおよそ2回発情を見逃していることを意味し,表4に示す試算によると,農家あたり252万円の経済的損失が生じていることになる.
そこで,牛の運動量の時間変化を分析することによって,自動的に発情兆候の検知を行う手法が提案されている.発情期には運動量が通常時よりも上昇する傾向があり,その上昇を捉えることで検知を行っている.しかしながら,栄養不足や栄養過多の牛はこのような発情兆候が微弱となることが知られており,特に肉用繁殖牛の場合,泌乳量が測定できないため栄養状態を考慮することが難しく,発情見逃しの大きな要因の1つになっている [5].
本プロジェクトでは,牛が社会性のある動物であることに着目し,他の牛との間に発生する特徴的なインタラクションを分析している.インタラクションの例として,発情している牛を中心とした乗駕行動が挙げられ[6],発情兆候が牛間の関係として表面化することがある.このように,従来の牛個体の分析とは異なる視点から分析を行うことによって,これまで見逃されてきた発情兆候の検知を重点的に試みている.
本プロジェクトでは,2つの課題に取り組んできた.1つ目が電波強度に基づく牛のトラッキングであり,牛のインタラクションを抽出するにあたって必要な位置情報の取得を目指している.屋外において位置情報を取得するためにはGlobal Positioning System(以下,GPS)を利用することが考えられる.しかしながら,一般にGPSデバイスの消費電力は大きく,さらに取得した位置情報を無線で送るなど何らかの方法で収集しなければならない.すなわち,GPSデバイスを駆動するバッテリを頻繁に交換せねばならず繁殖農家の負担になることが予想される.放牧場をカメラで撮影し,その画像から物体検知と位置推定を行う手法も考えられるが,対象としている黒毛和種は同様の外見で見分けがつかず,算出した位置情報と牛の個体番号との対応づけが困難であるという問題を抱えている.そこで,本プロジェクトでは,省電力無線通信方式であるBluetooth Low Energy(以下,BLE)を用いた無線タグによる位置推定技術の開発に取り組んでいる.これまでにも,BLEによる電波強度を用いて屋内の位置推定を行う研究は行われてきているが,牧場という広大な環境においての研究は乏しい.この技術を開発することにより,省エネルギーでリアルタイムに牛の位置情報を取得できるようになる.2つ目がインタラクション情報の抽出による発情兆候の検知である.位置情報,加速度などのセンサ情報を基に牛間のインタラクション情報の抽出を行う.牛は,ほかの牛と接触・接近・行動の同期などを行いながら生活を行っている.これらの情報を表現したグラフを作成し,エッジの変化,さらにはグラフクラスタリングによって抽出したコミュニティの時間変化を分析し,発情兆候の検知を行う.
3.設備構成
3.1 設備の概要
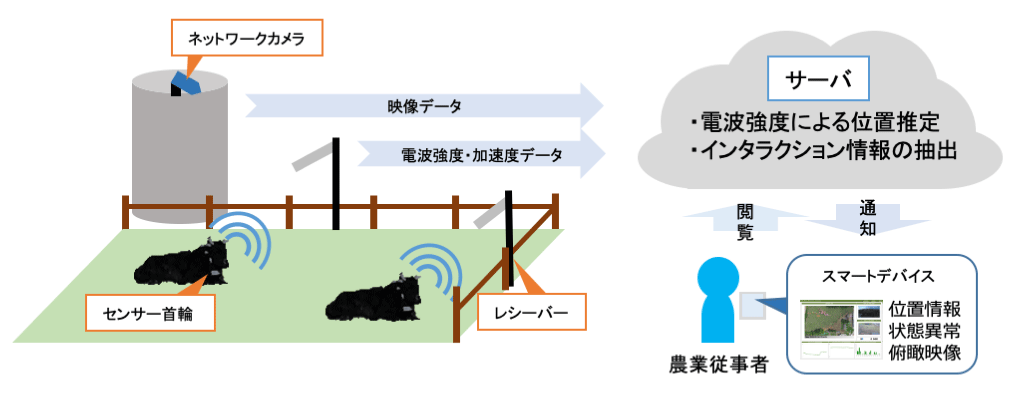
本章では,本プロジェクトを実現するためのシステム環境について述べる.システムの処理フローならびに使用する設備の概要を図5に示す.放牧地にいる牛にBLEタグを取り付け,定期的にビーコン信号を発信させる.この電波を放牧場周辺に設置したレシーバで受信し,その電波強度情報を通信回線を通じてサーバに定期的に転送する.サーバでは受け取ったデータをもとに牛の位置推定を行い,推定された位置情報と加速度といったセンシング情報を用いて牛間のインタラクション情報を抽出・分析する.これらのインタラクション情報はWebサーバ上にアップロードされ,随時閲覧することができる.また,発情が検知された場合には,ネットワークカメラの映像とともに利用者のスマートデバイス等に通知する.
3.2 設備の詳細
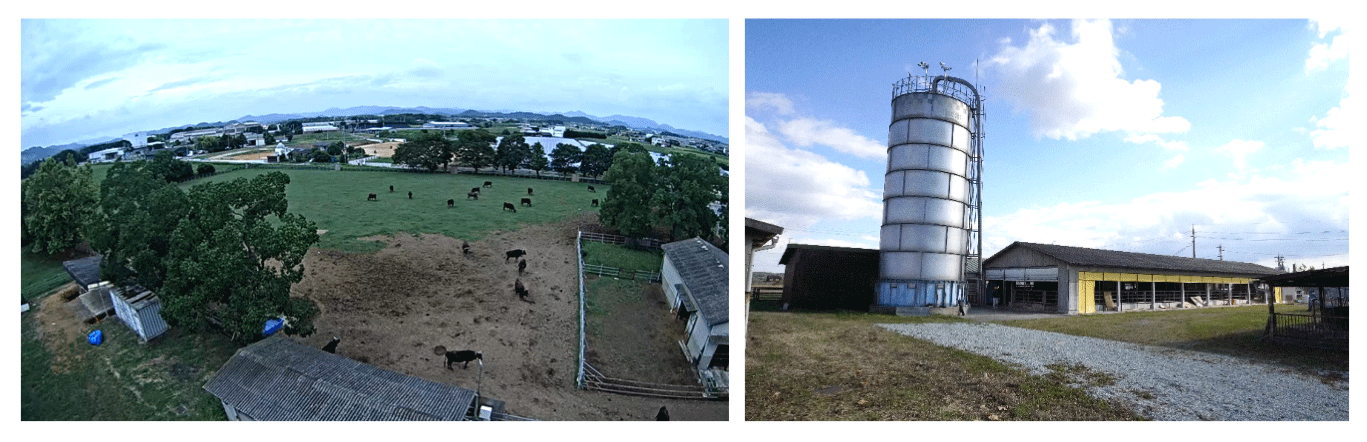
本プロジェクトでは,兵庫県加西市に位置する神戸大学大学院農学研究科附属食資源教育研究センター内にある牧場で実験を行う(図6).この牧場は,約200m×100mの放牧地と給餌を行う牛舎によって構成されており,牛は双方の間を自由に移動することができる.放牧地は西側に向かって緩やかな下り坂となっており,日中に日陰を作るために,牧場の周りには木が植えられている.
3.2.1 BLEタグシステム
放牧牛に対してBLEタグを取り付けて位置推定を試みる.使用したBLEタグシステムは,屋内での位置推定において実績があるNTTテクノクロス社(旧NTTソフトウェア)製 mobicolletである.mobicolletのレシーバとタグの外観を図7に示す.タグは15gと軽量で,ボタン電池で1年以上の動作が保証されている.このタグからは,バッテリ残量とタグIDが定期的(2秒ごと)に発信される.このタグを牛首に左右2個ずつ装着する.

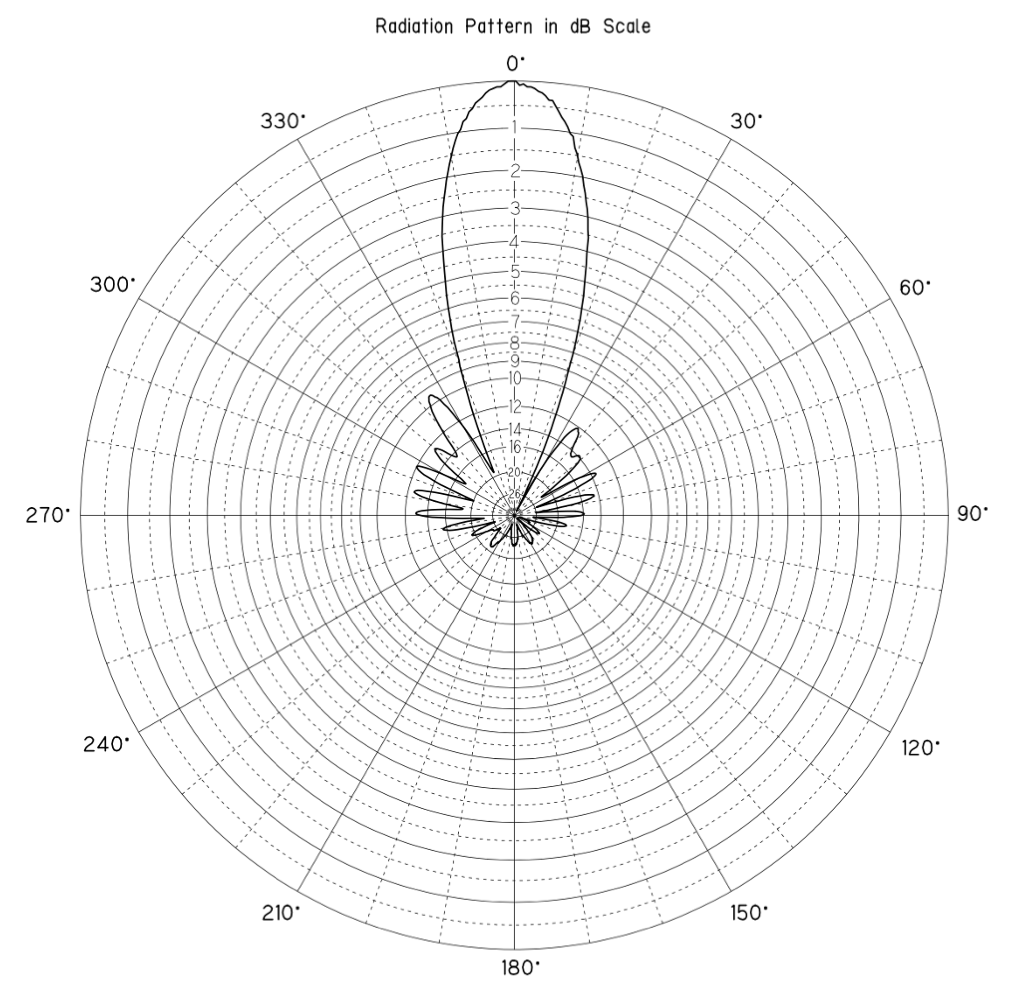
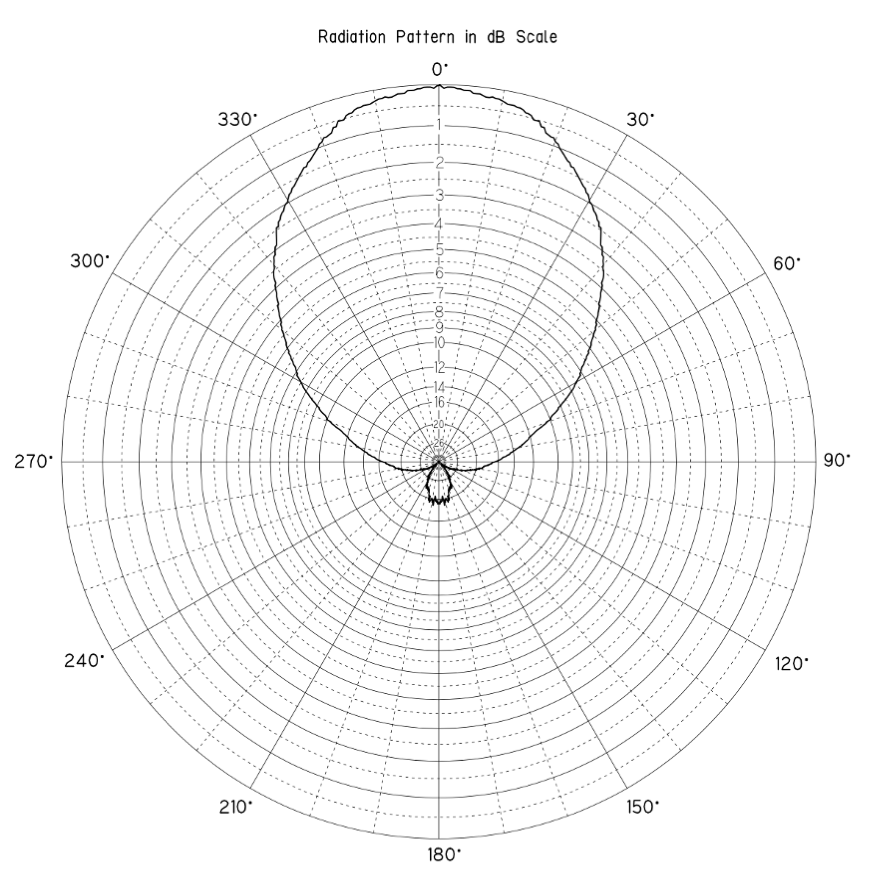
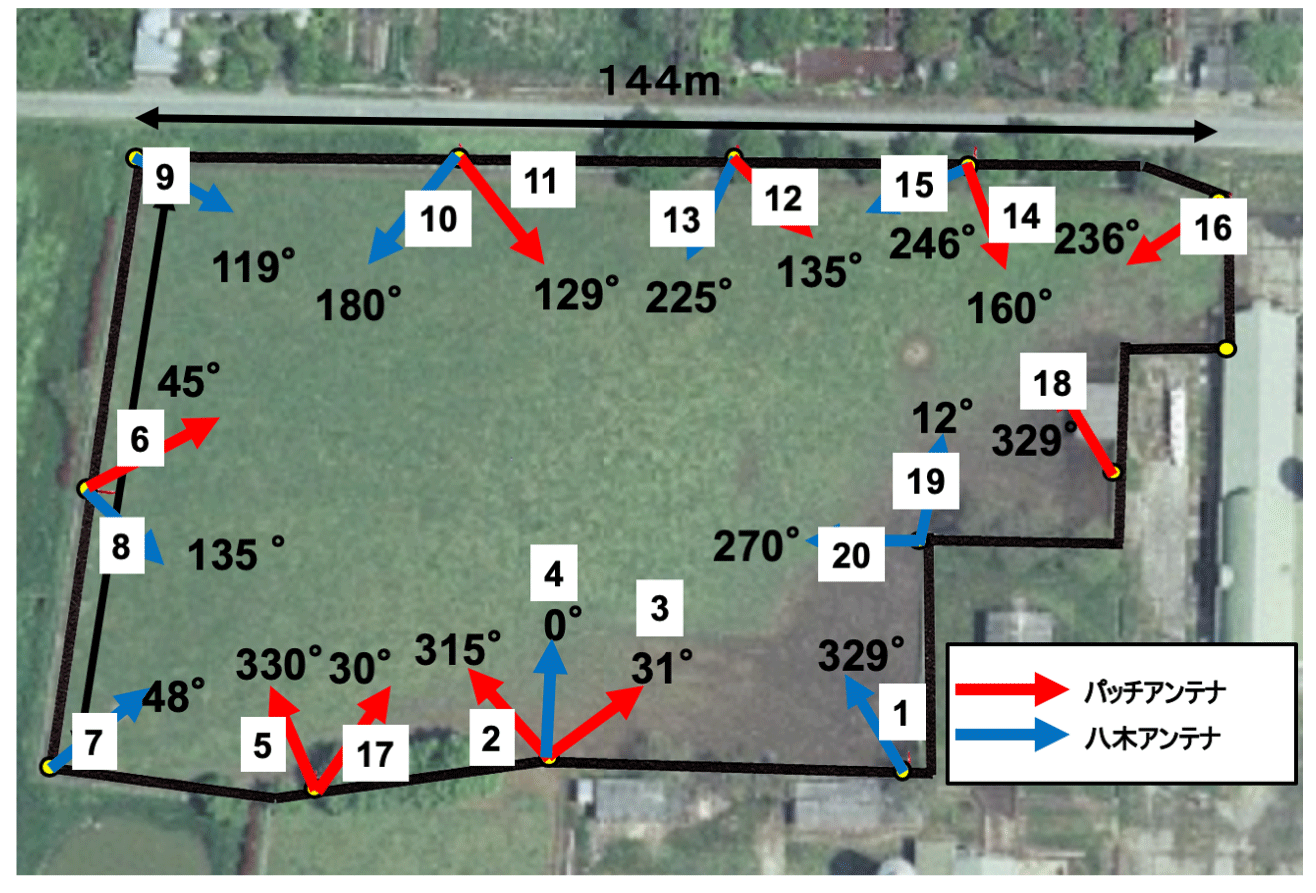
レシーバに装着したアンテナは,図7で示すようなホイップアンテナではなく,より遠くからの無線信号を受信するために,図8,9のような指向性特性を持つ,八木アンテナと平面パッチアンテナを利用する.これらアンテナの指向性や利得を考慮し,放牧場内のいずれの場所からもBLEタグからの電波を少なくとも3つのアンテナで受信できるよう,図10に示すように,放牧場周囲の12個所に八木アンテナ,パッチアンテナを組み合わせて設置した.各レシーバで取得された受信電力データは,放牧場周囲に引き回した有線LANを通してNetwork Access Server(NAS)に送られる.各牛に4個のBLEタグが装着されており,それぞれから2秒ごとに発信されるビーコン情報が最大20台のレシーバで受信される.BLEタグから発信されNASに蓄積される牛1頭あたりの1日の情報量はおよそ200Mbytesであり,約20頭の放牧牛から取得されるデータを合計すると,約4Gbytes/日となる .
3.2.2 センサ首輪
牛の位置情報や行動情報を取得するために,BLEタグとBLEセンサデバイスを取り付けた首輪を作成した.図11にその外見を示す.
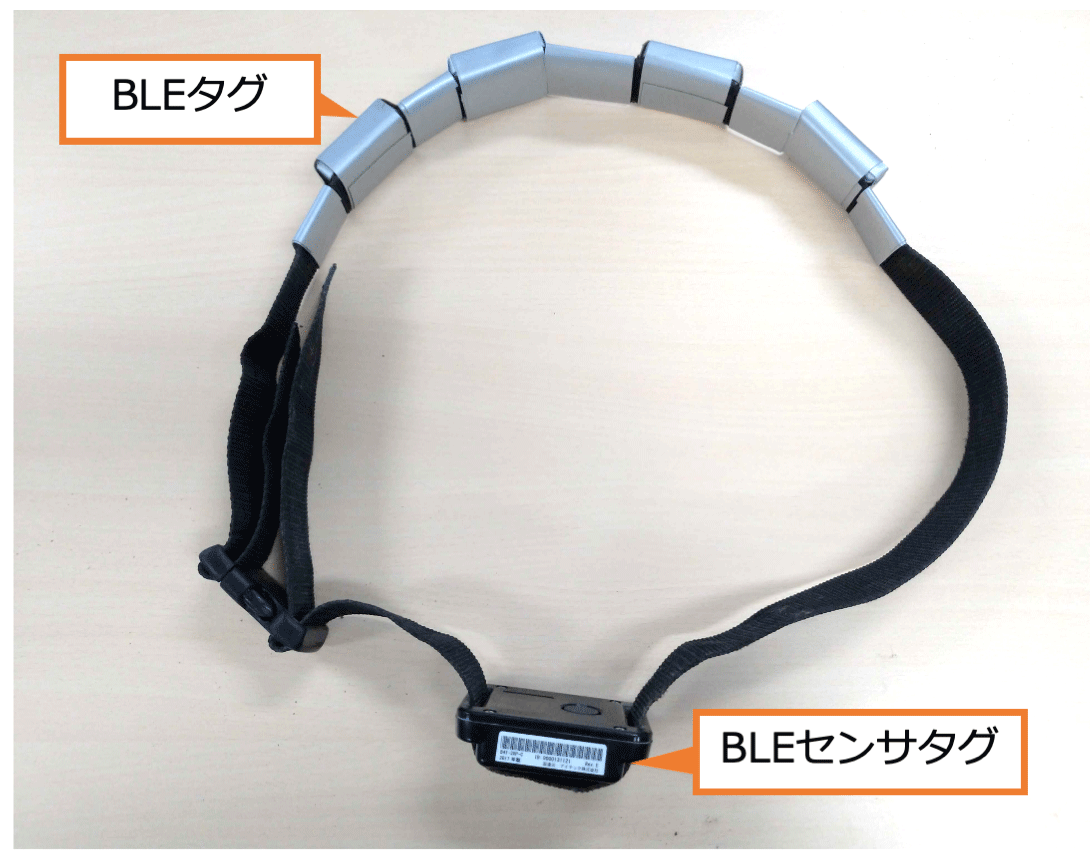
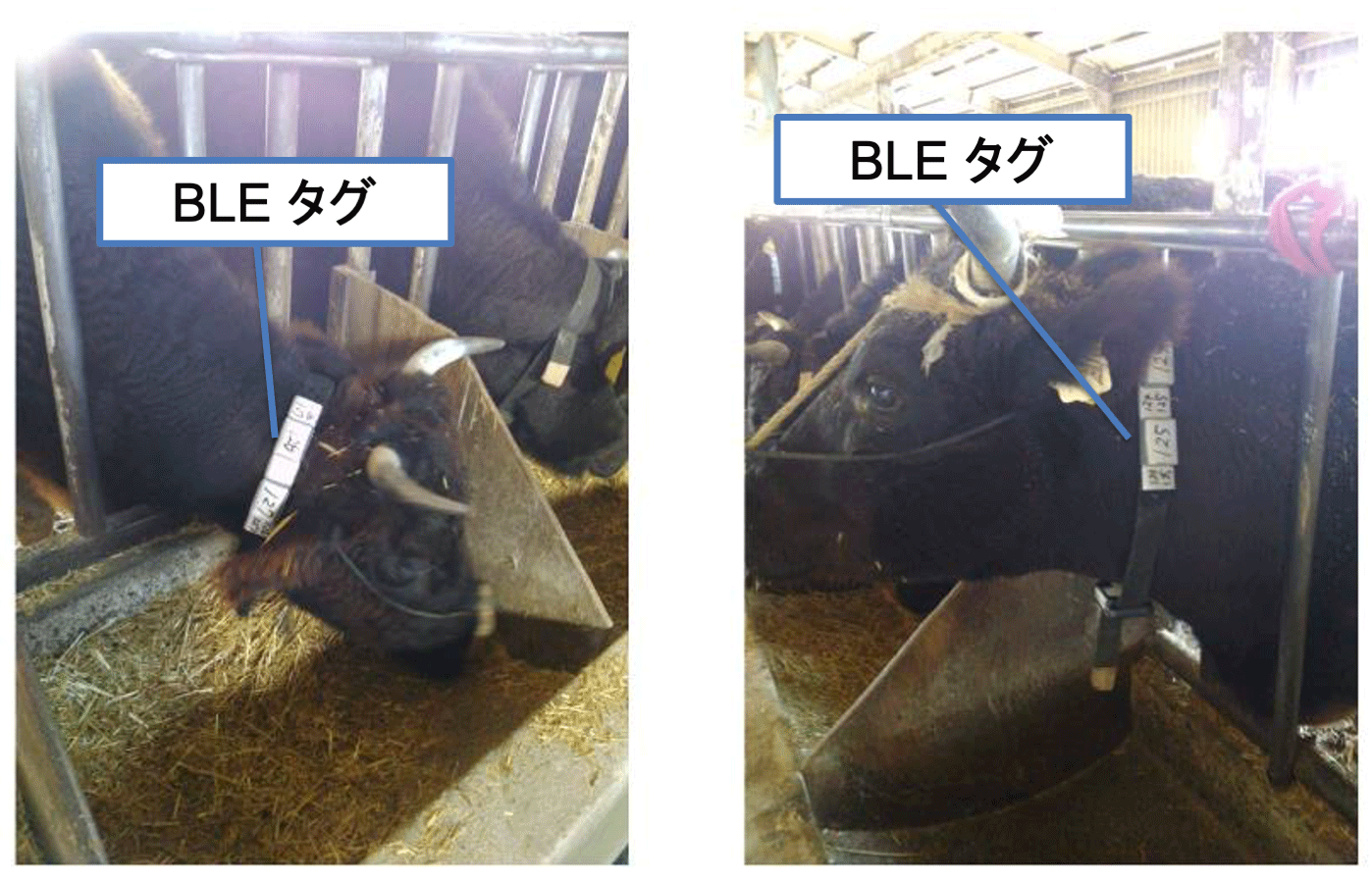
図7に示すように,BLEタグには一方の面だけにシールが貼られている.BLEタグ内の基盤上に実装されたアンテナには指向性があり,シール面方向の利得が最も高いことがわかっている.そこで,図12に示すようにタグに防水加工を施した上でベルトに取り付け,図13に示すようにベルトを牛の首に巻いたときにタグのシール面ができるだけレシーバアンテナの方に向くようにした.
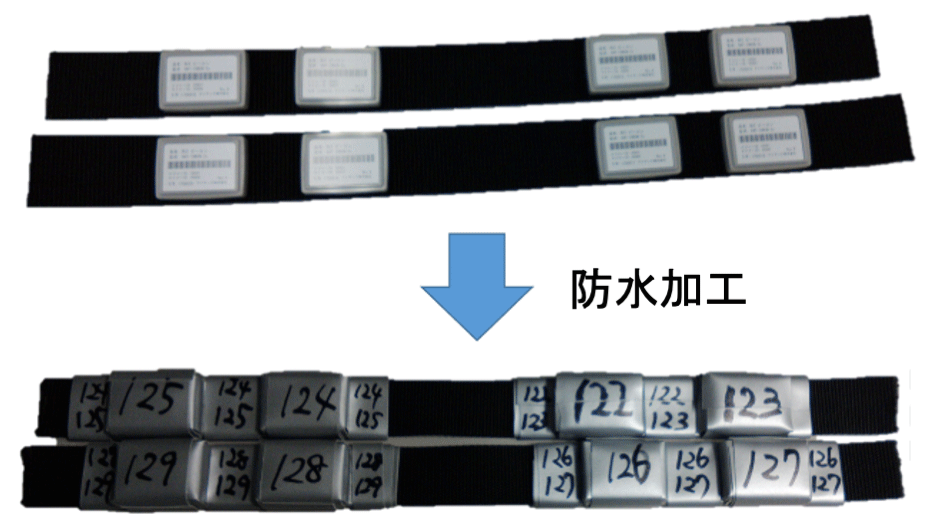
BLEセンサタグでは,3軸加速度や気圧などの牛の動きに関する情報を取得している.このセンサタグは防水仕様となっていることから,BLEタグのような加工は行っていない.
3.2.3 ネットワークカメラ
牛の発情は,決まった時間に発生するのではなく,24時間どのタイミングでも起こる可能性があり,広い放牧場内で目視で発情を確認するためには労力がかかる.そこで,放牧地にネットワークカメラを設置し,自動的に映像を収集し利用者に提供を行う(図14).なお,この機能は,本システムを補助するものであり,発情兆候の自動検知に際して必ず必要なものではない.
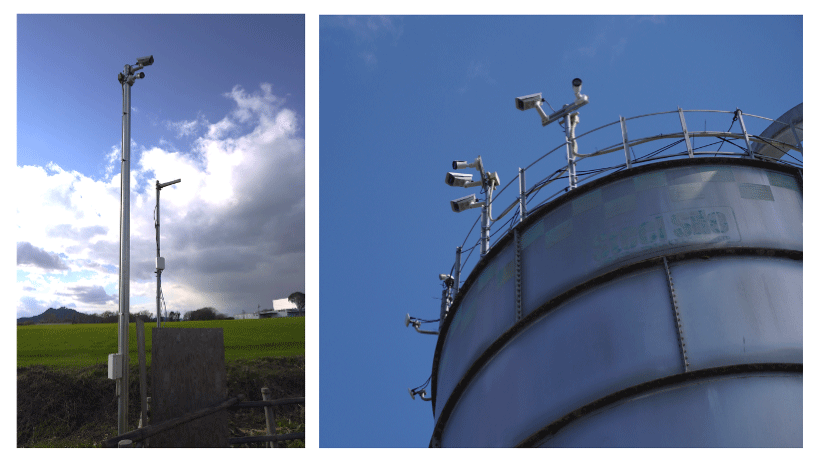
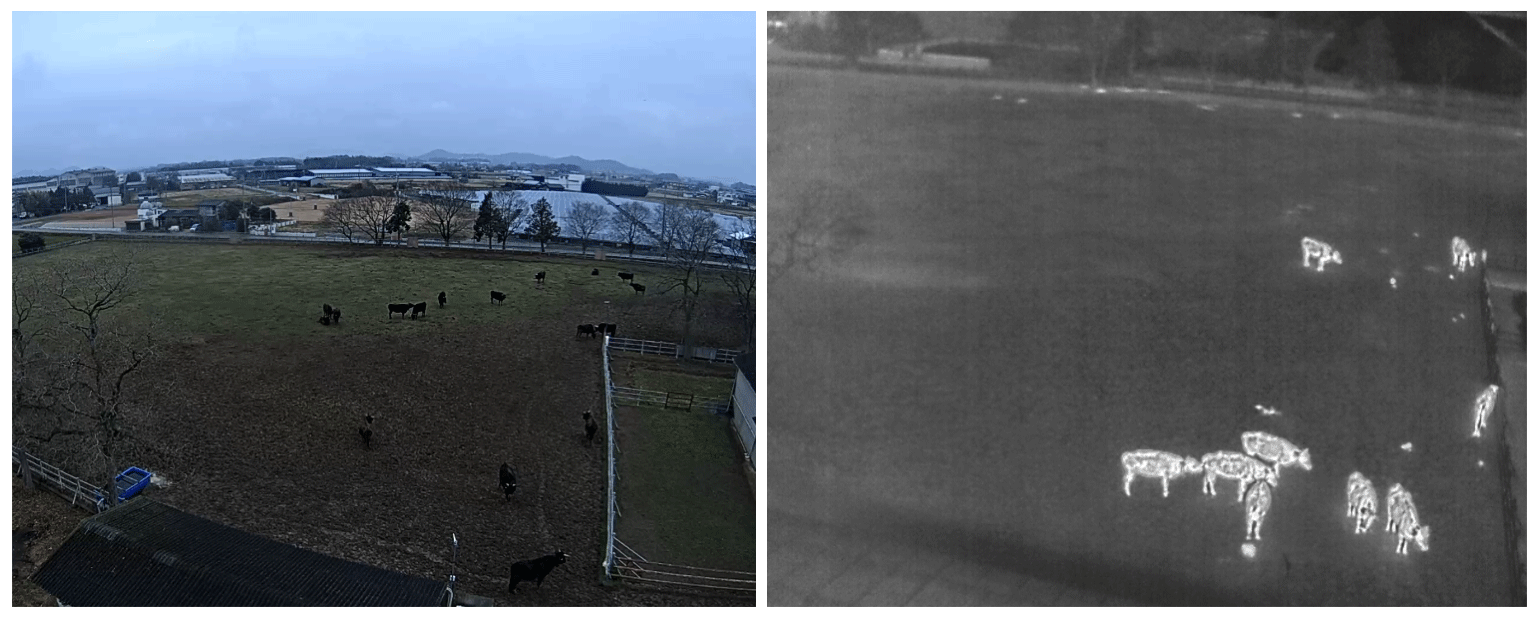
先述のとおり,牧場は広大であり,周りには木が植えられているため,多くの死角がある.そこで,新たに牧場の一部にポールを設置するなどして放牧地に対し3方向から撮影を行っている.各地点には2種類のカメラを設置している.1つ目は可視光カメラであり,主に昼間の映像を記録している.最大4K画質で映像を取得することができるため,発情にかかわる乗駕行動やフレーメン行動といった細かな動きも確認することができる(図15左).2つ目は暗視カメラであり,主に夜間の映像を記録している.赤外線の情報から映像を取得しており,これまで目視での観察では限界のあった日沈後の行動を分析することが可能となっている(図15右)
4.放牧牛飼養管理システム
4.1 受信電波強度のビッグデータに基づくトラッキング
深層学習を用いた受信電波強度(Received Signal Strength Indicator : RSSI)にもとづくトラッキング手法について述べる.本手法では,事前学習でRSSIとGPSによって取得した位置情報の組をディープニューラルネットワーク(DNN)に学習させ,推定時にはRSSIと学習済みDNNによって位置推定する方法である.インタラクション情報取得に必要な推定誤差としては,牛の体長や視力を考慮し,平均5m以内を目標とした.
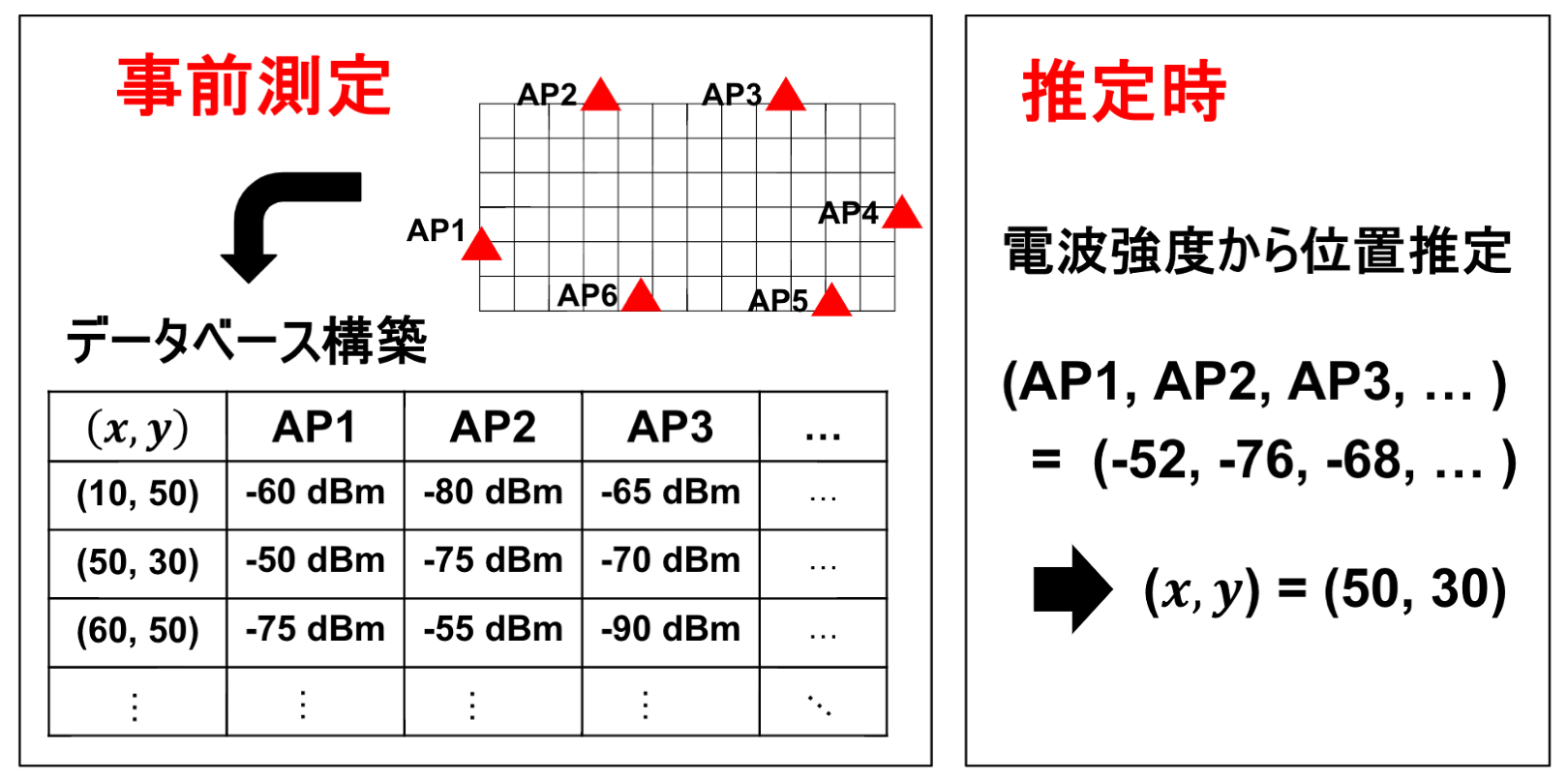
既存のRSSIを用いた位置推定手法の1つにフィンガープリント方式がある.フィンガープリント方式は,無線デバイス(本研究においてはBLEタグ)が置かれた位置座標とその無線デバイスから発信された電波を周辺に設置したレシーバで受信した際のRSSIの組を用いた位置推定手法である.以下,位置座標とRSSIの組をフィンガープリントデータと呼ぶ.フィンガープリント方式は,マッチングアプローチと深層学習アプローチに大別される.
マッチングアプローチの概要を図16に示す.マッチングアプローチでは,対象エリアをグリッド状に分割するなどして,各個所における位置とその場所RSSIの値を計測し,フィンガープリントデータとしてデータベースに保存する.位置推定の際には,取得されたRSSIの値とデータベース内の最も類似するフィンガープリントデータを探索し,そのフィンガープリントデータの位置座標を推定座標とする.このアプローチを牧場のような広い屋外で使用するには,データベース構築のために非常に多くの場所で事前測定を実施しておく必要がある.また,データベースのレコード数も多く,最も類似するフィンガープリントデータを見つける時間も長くなる.そこで今回は深層学習アプローチを用いる.
深層学習アプローチの概要を図17に示す.このアプローチでは,まず,GPSロガーとBLEタグを牛に取り付け,放牧場を自由に移動させる(すなわち,放牧する)とともに,レシーバでBLE タグから発信されるビーコン信号のRSSIを取得する.その後,GPSロガーを回収し,時刻と位置の情報を取り出す.GPSロガーから得られる移動履歴から,牛は放牧場をある程度くまなく移動しており,網羅的ではないもののおおよそのフィンガープリントデータが取得できる.こうして取得したフィンガープリントデータを,DNNの学習データとして用いる.推定時には学習済みDNNにRSSIを入力すると,推定座標を出力させることができる.深層学習アプローチでは,推定時に未知のRSSIが入力されたとしてもDNNが補完して位置座標を出力することができる.DNNの学習が完了すれば,フィンガープリントデータは不要であり,マッチングアプローチと異なりデータベース化しておく必要もない.さらに,深層学習アプローチにおける位置推定は,RSSIを入力してDNNに順伝搬させるだけであり,マッチングアプローチに比べて,位置推定に要する時間は短い.
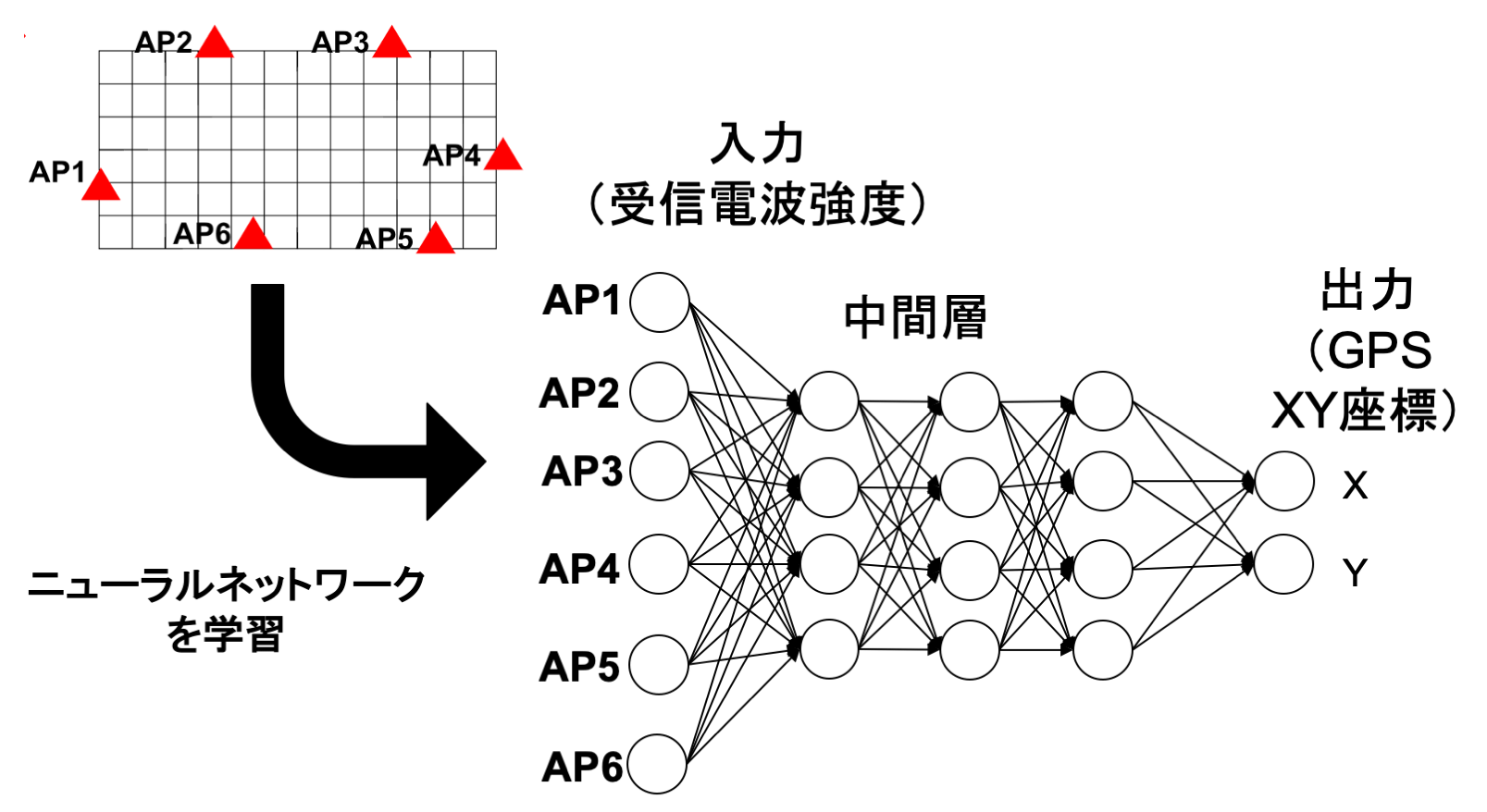
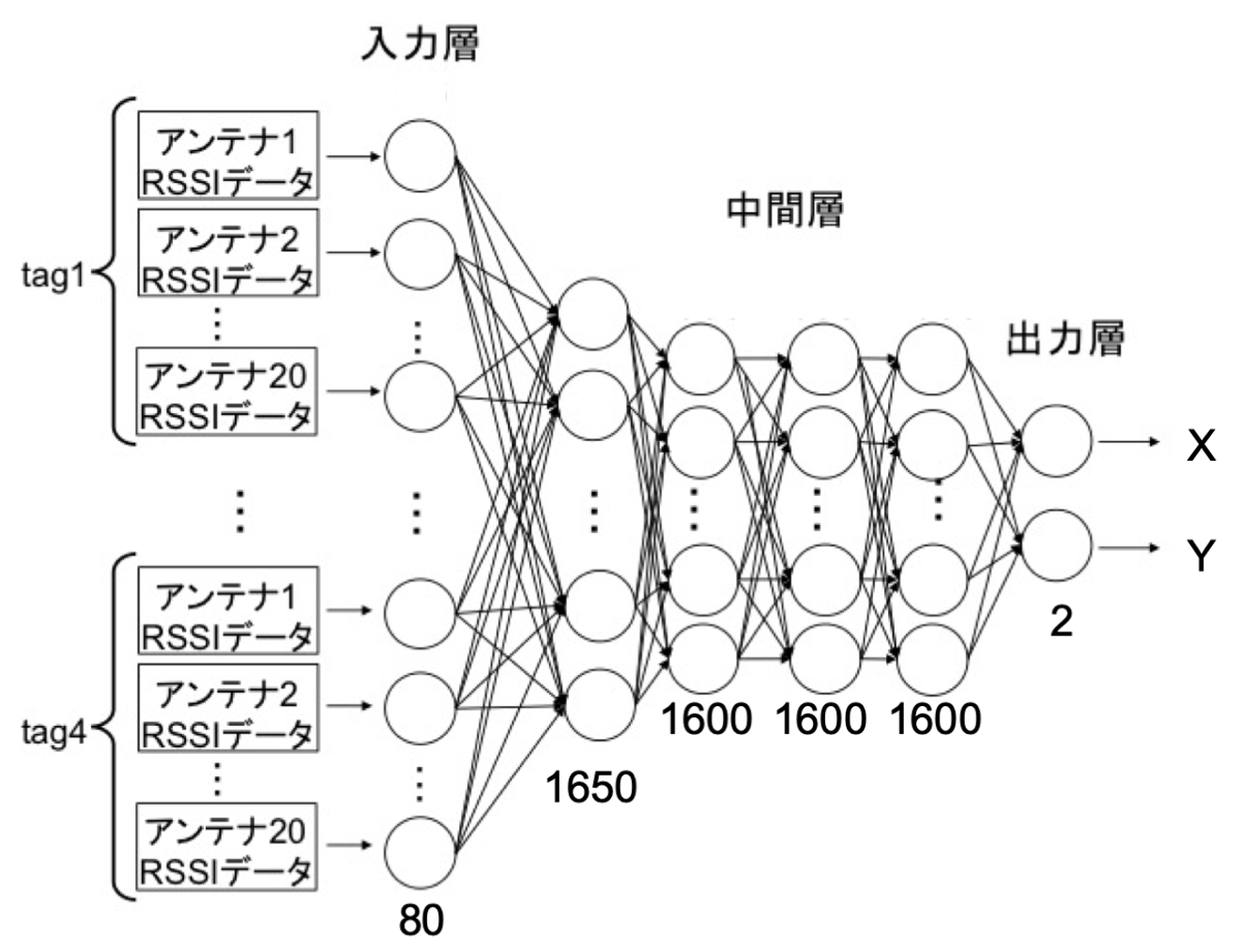
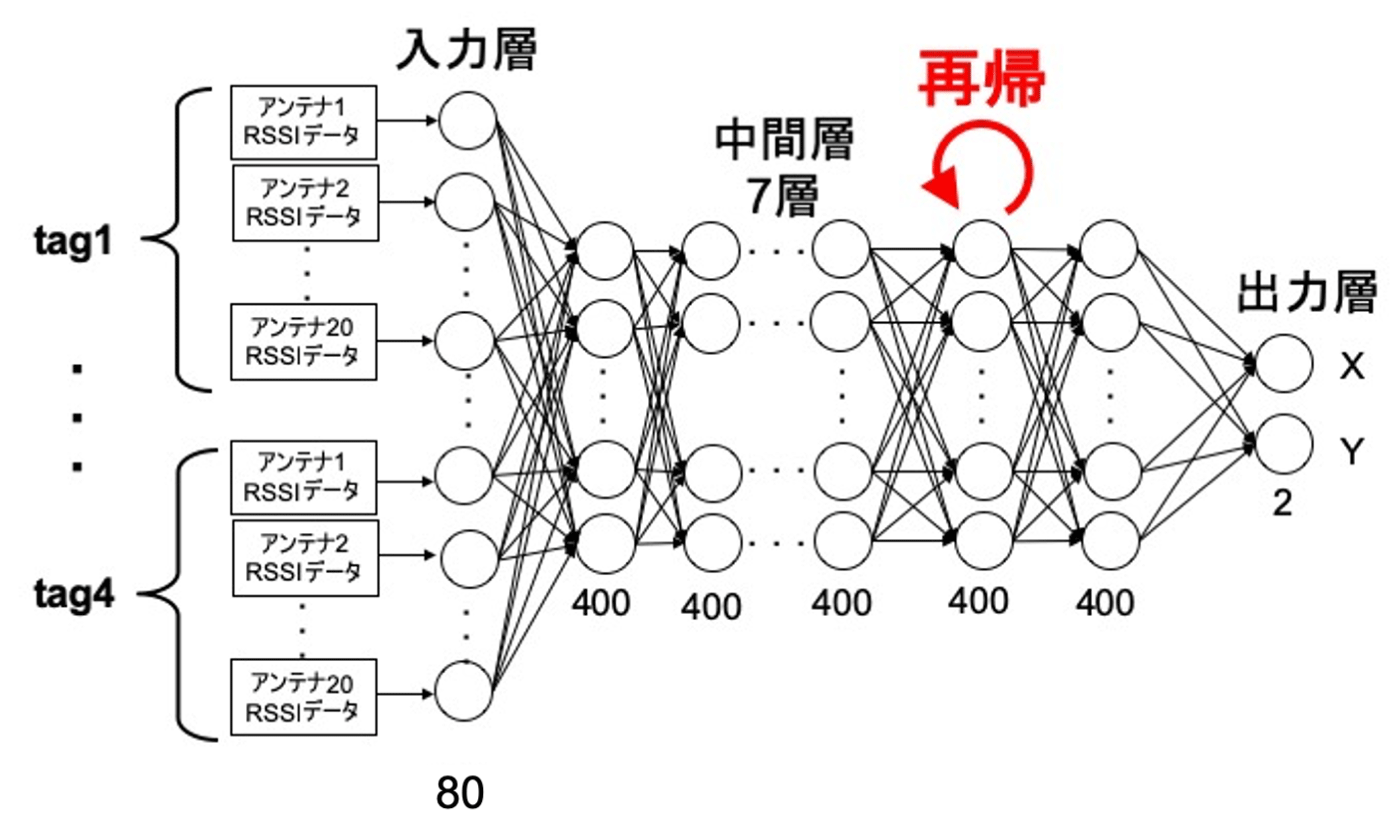
図18,19に今回用いたDNNの構造を示す.どちらも20台のレシーバの各々における,ある牛に取り付けられた4つのタグから発せられるビーコン信号に対する受信電力,すなわち20x4=80を入力とし,その際のGPSで取得した座標(X, Y)の2出力を学習する構成をとっている.各層の数字はユニット数を表している.層数やユニット数は予備実験によって決定した.また,図19はLSTM(Long Short Term Memory)と呼ばれるDNNの構造を示している.LSTMは,DNNの中間層に内部状態を記憶する機能を付加したもので,時系列データを用いた学習に適しており,音声信号処理での有効性が示されている.牛の位置データはその移動とともに順次生成される時系列データと捉えることから,本研究においてもLSTMの適用を試みた.
位置推定精度のテスト結果について示す.テストでは,2019年7月26日から8月4日までの固体番号20118の10日間のフィンガープリントデータで学習させたDNNを用いて行う.またテストは2019年8月5日から8月6日までの2日間のフィンガープリントデータを用いて行った.学習に用いたフィンガープリントデータは1999.0MBであり,テストに用いたフィンガープリントデータは372.3MBであった.再帰なしのDNNと再帰ありのDNN(LSTM)の5秒ごとの1時間分の位置推定結果の軌跡を図20,21に示す.図20に示すように再帰なしDNNによる位置推定ではある程度の位置推定はできているものの,軌跡がジグザグであったり,5秒で数m以上移動するといった牛の移動として不自然な結果となった.それに対して図21に示す再帰ありDNNによる軌跡は牛の移動として自然な結果となった.これにより,視覚的に再帰ありDNNの有用性を確認できた.
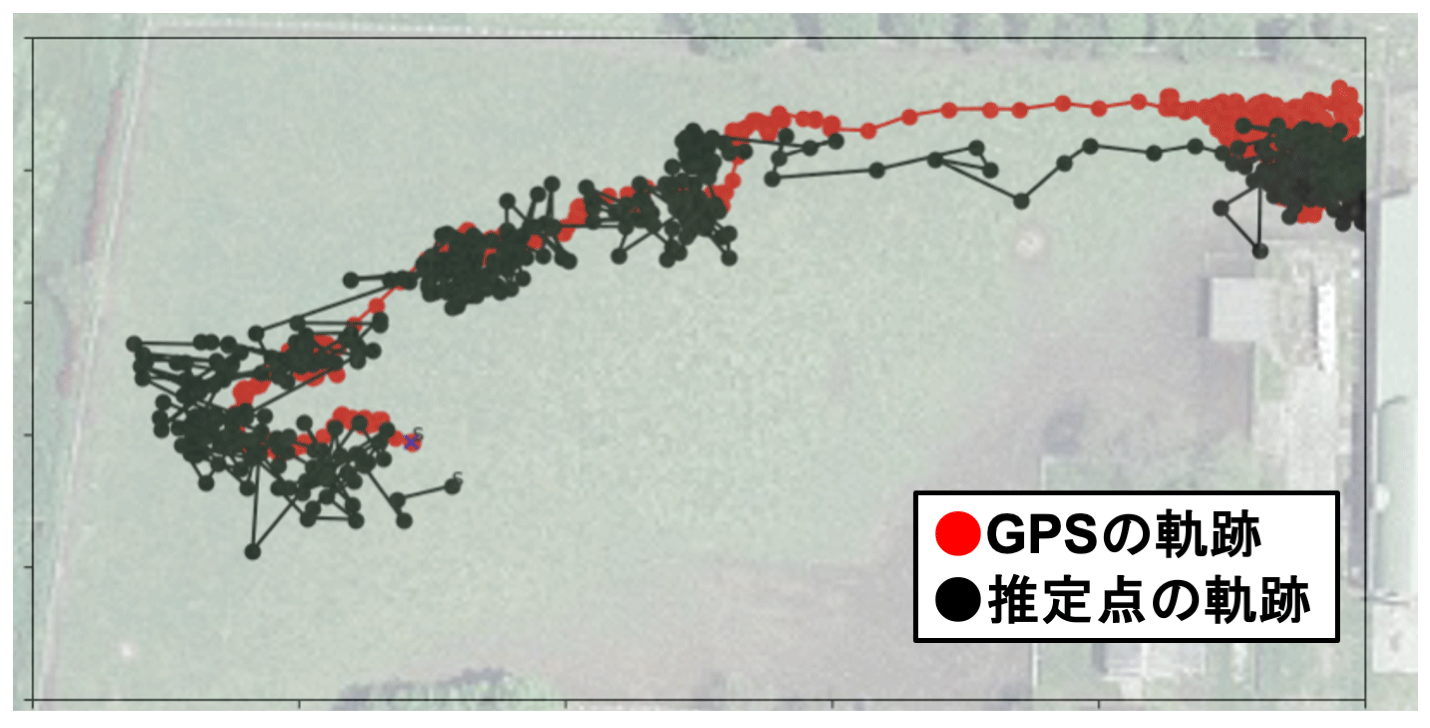
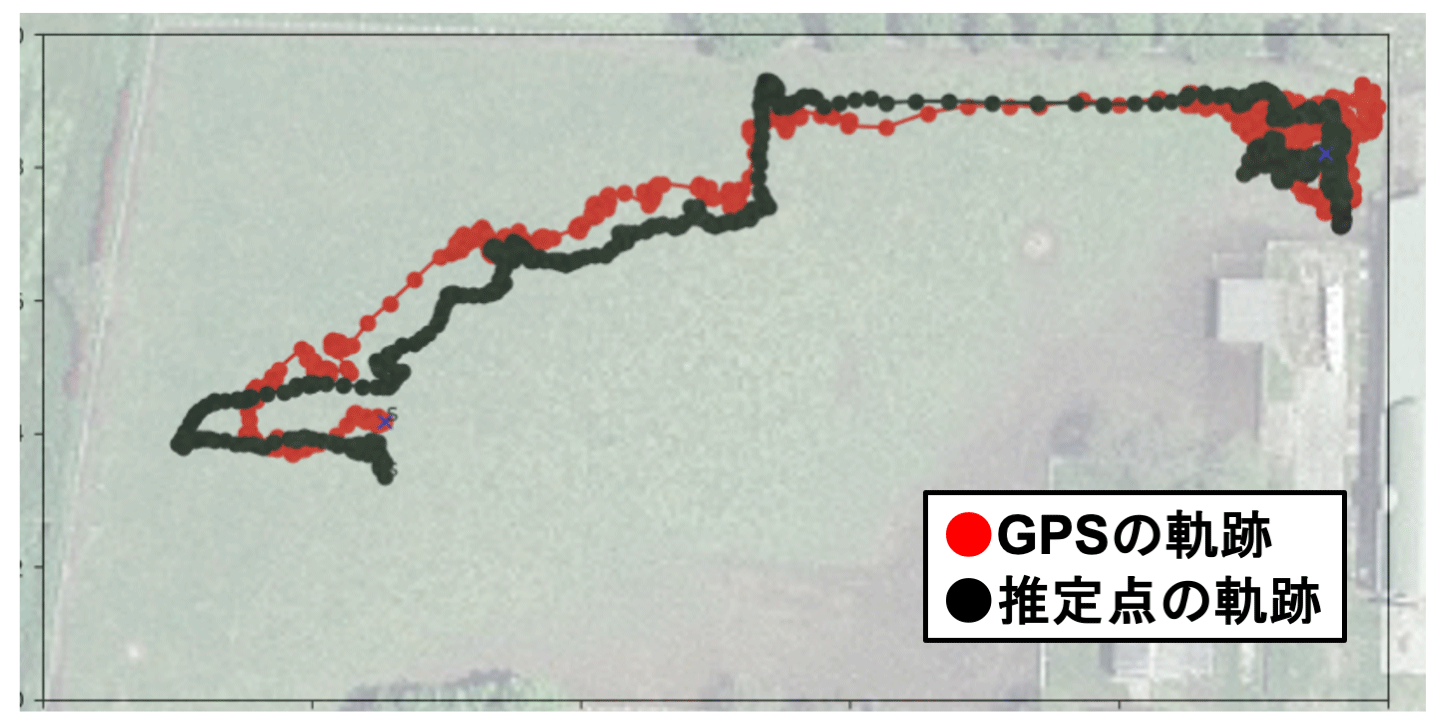
表22にGPSとその点に対応する推定点の平均距離誤差とその標準偏差を示す.固体番号20118が学習に用いた牛であり,そのほかにも,固体番号20289,20125,20268でもテストした.学習に用いていない牛でテストしたのは,BLEタグの送信電力や指向性のばらつきの影響を確認するためである.

再帰なしDNNの位置推定結果に着目する.学習に用いた固体番号20118の牛で最も良い精度である8.41mで位置推定できており,学習に用いていないその他の牛でも9m程度で位置推定できていることが分かる.しかしながら,インタラクションの分析に必要な5m以内で位置推定することはできなかった.次に再帰ありDNNの位置推定結果に着目する.再帰なしDNNと同じく,学習に用いた固体番号20118で最も良い精度で位置推定できており,平均距離誤差4.98mで位置推定できていることが確認できた.その他の牛に関しても平均距離誤差5〜6m程度で位置推定できることが確認できた.
再帰なしDNNによる位置推定結果を時系列としてみたとき,位置が急激に変化していたのに対し,再帰ありDNNによってRSSIを時系列データとして扱うことが可能となったため,軌跡はより自然になり,最大誤差が抑えられたものと考えられる.このような理由から,実際の運用では精度の良い再帰ありDNNを用いることにした.
4.2 インタラクション情報の抽出
牛のインタラクションには多くの種類がある.例として,図23に示すような毛づくろいや角突き合いがあり,牛間の好意的もしくは敵対的な関係を反映している.このような行動以外にも,前述したように,発情の際には通常時とは異なる特殊なインタラクションが現れることがある.この特殊なインタラクションの2つの傾向に注目している.1つ目は,臀部の匂いをかぐフレーメン行動や,乗駕行動である.これらの行動の際には,発情している牛を中心に他の牛との間に強い近接関係を持つことから,通常時とは異なる特殊な群れを生成することがある.この群れは,時間経過においても所属しているメンバが安定しており,図24に示すように,常に似たような行動や経路を取りながら生活を行う傾向がある.

2つ目は,接近行動を行う時間の増加である.普段から好意的行動などで特定の牛への接近行動は単発的に発生しているが,発情時には図25に示すように,発情している牛に対して,他の牛が興味を示し背後から接近する現象が数時間継続して発生する傾向がある.

このような発情時に発生する特殊なインタラクションの発生を評価する指標を作成した.以下,各指標の概念について述べていく.
4.2.1 行動の類似性に基づくコミュニティ抽出および分析手法
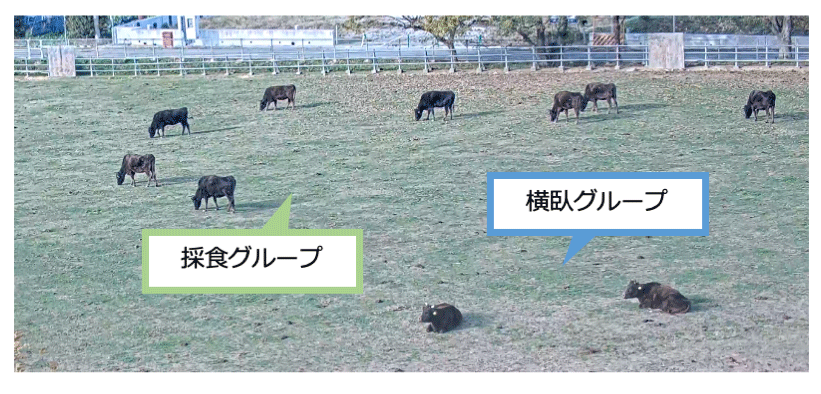
牛は社会性に基づいて群れを形成しながら生活を行っている.その中で,日頃から周りの牛からの影響を受けながら活動しており,自然と近くにいる牛の行動が類似する傾向が見られる.例として,横臥している牛の近くで,他の牛が横臥を行う様子が見られることが挙げられる(図26).このような,行動の種類や継続時間が類似している群れをコミュニティと呼ぶこととし,このコミュニティの時間変化を分析することで発情兆候の検知を行う手法を提案している.
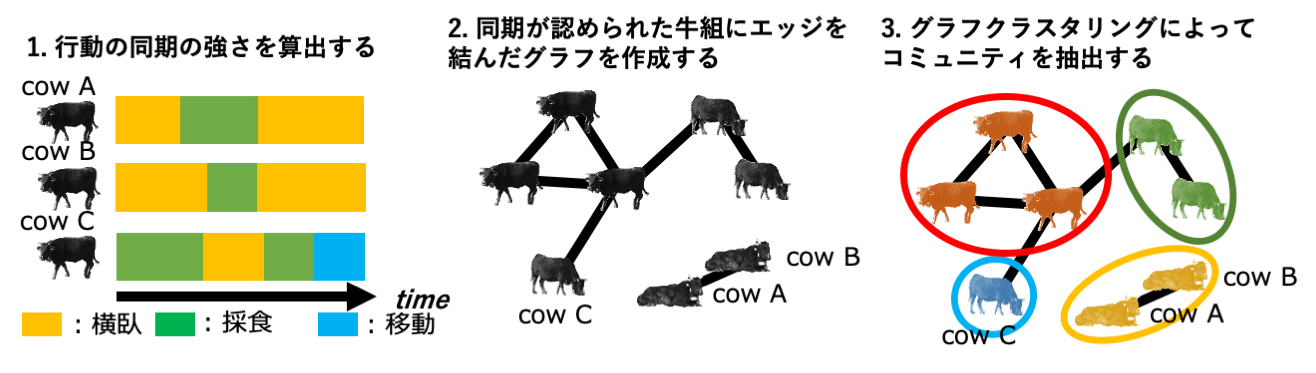
行動の時系列データから,コミュニティの抽出を行う流れを図27に示す.大きく2つのステップに分かれており,ステップ1では,行動の時系列データを用いて牛間の行動の同期の強さを指標化する.行動はセンサ首輪からの位置情報に基づいて分類する.ステップ2では,ステップ1で求めた値を基に行動類似性が強い牛間にのみエッジを結んだ無向グラフを作成し,グラフクラスタリングを行うことでコミュニティを抽出する.グラフを介することによって,間接的な牛のつながりを表現することができる.この手法については参考文献で詳細に述べている[10].
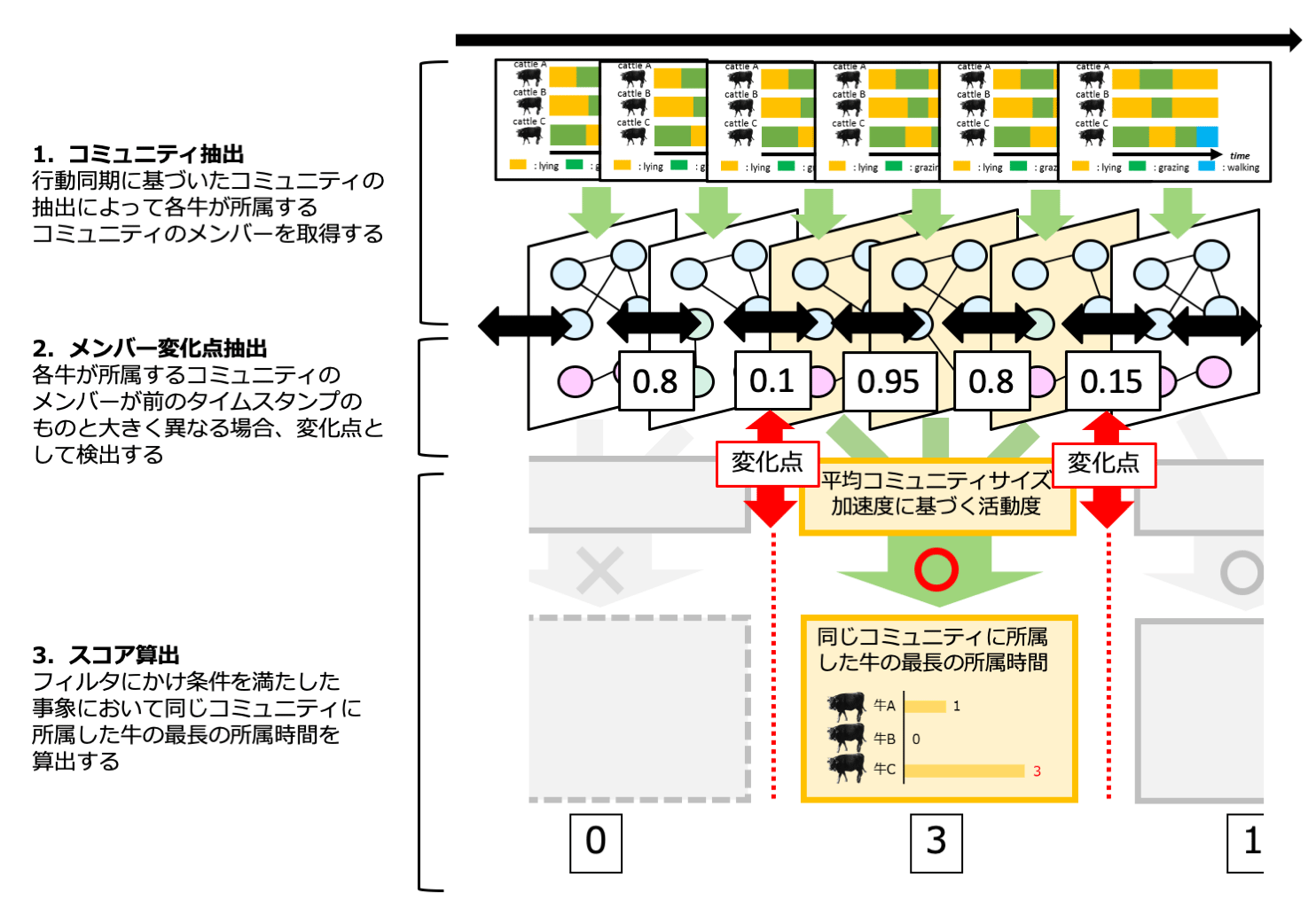
抽出したコミュニティの時間変化を分析する流れを図28に示す.コミュニティのメンバの安定性を評価することで,発情時における特殊なコミュニティへの所属度を指標化している.コミュニティを構成するメンバが前後で大きく変化があった時刻を変化点と呼ぶことにする.この変化点間において最も長く同じコミュニティに所属していた牛の所属時間を評価している.発情時には著しく同じメンバで行動をしている時間が長くなる傾向があるため,変化点の間隔が通常よりも広くなる.加えて,特定の牛が同じコミュニティに所属する時間が長くなることから,発情期に値が上昇する.本指標を発情コミュニティ所属度とする.
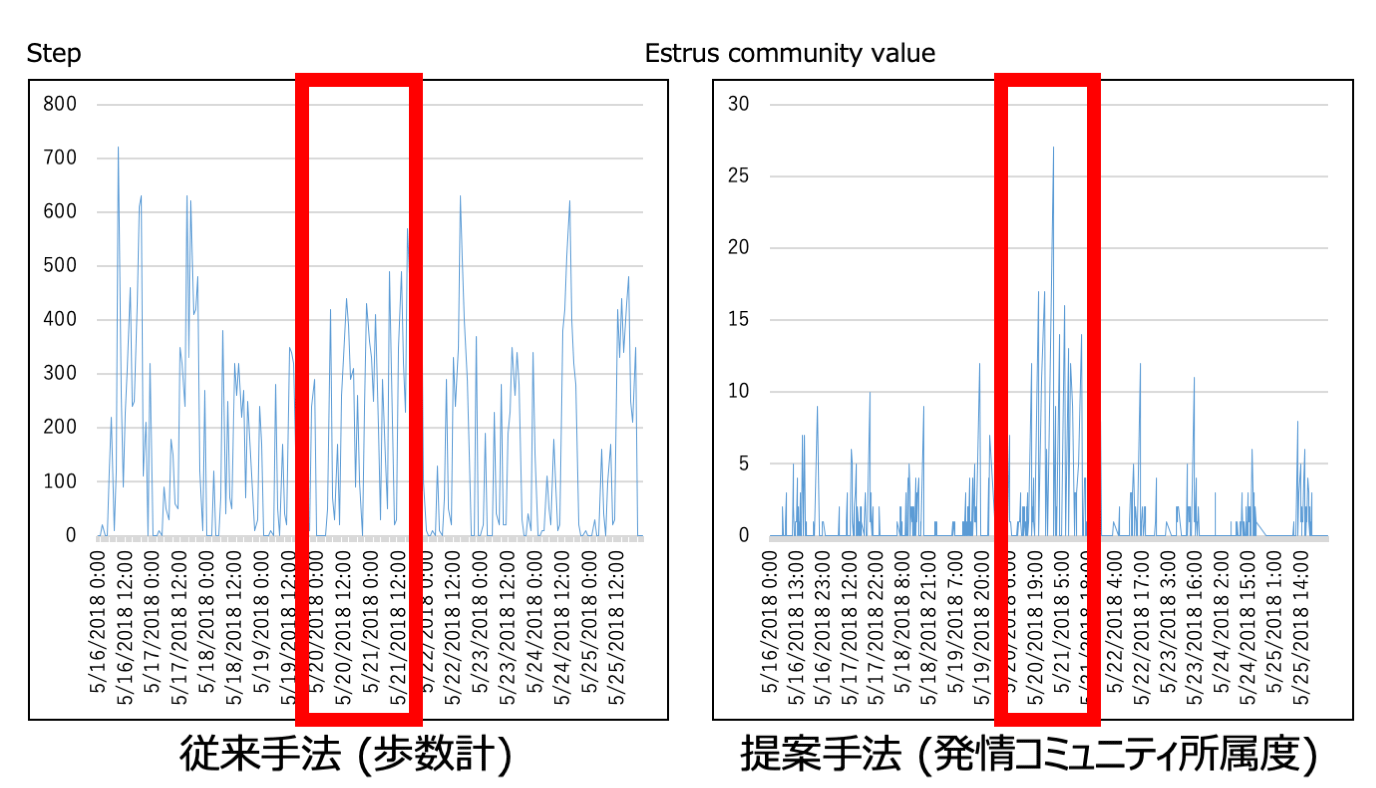
予備実験として,GPSを用いて取得した位置情報に本手法を適応し,従来手法では微弱であった発情兆候の検出に成功した事例を紹介する.実験結果のグラフを図29に示す.歩数計による活動量では変化が微弱であった発情兆候において,本手法では目視によって明確な変化を確認することができる.
4.2.2 接触・接近行動に着目した行動分析手法
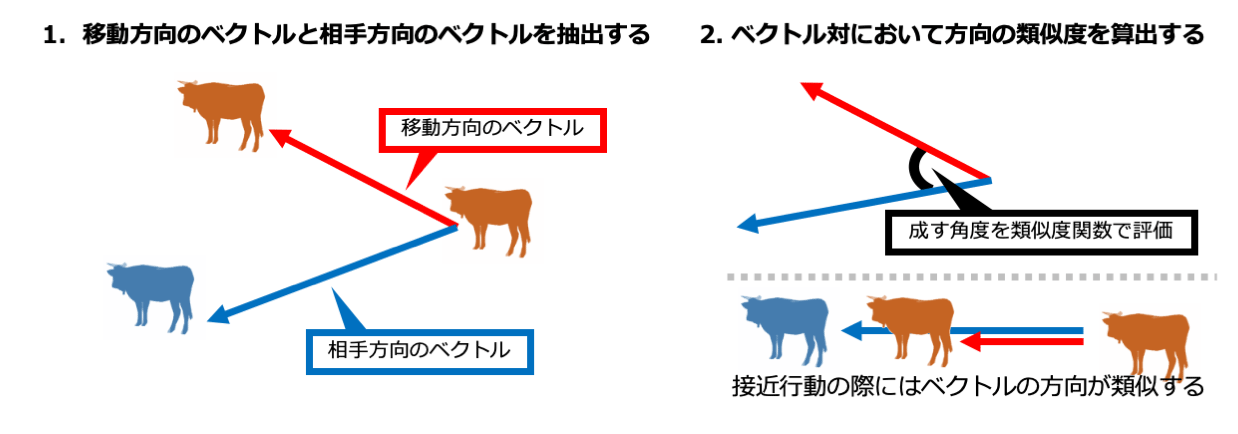
牛間に接近行動が発生するとき,それぞれの牛の進行方向が類似する.この性質に着目し,牛の接近行動の指標化を行う.一連の流れを図30に示す.2頭の牛の組において,自身の移動方向のベクトルと相手方向へのベクトルをそれぞれ抽出する.接近行動が発生している場合において,この2つのベクトルの方向が継続的に類似する.そこで,類似度関数を用いて2つのベクトルを評価し,一定間隔ごとに平均値の算出を行う.発情時には,類似度が高い状態が続くため平均値も高くなり,単発的な接近行動による値の上昇を除去することができる.詳細は[11]を参照のこと.なお,本指標(被接近度)は2つのベクトル間の角度を評価するコサイン類似度を基に算出しているため正負の値を取る.正の値が大きいほど接近行動を受けていることを意味する.
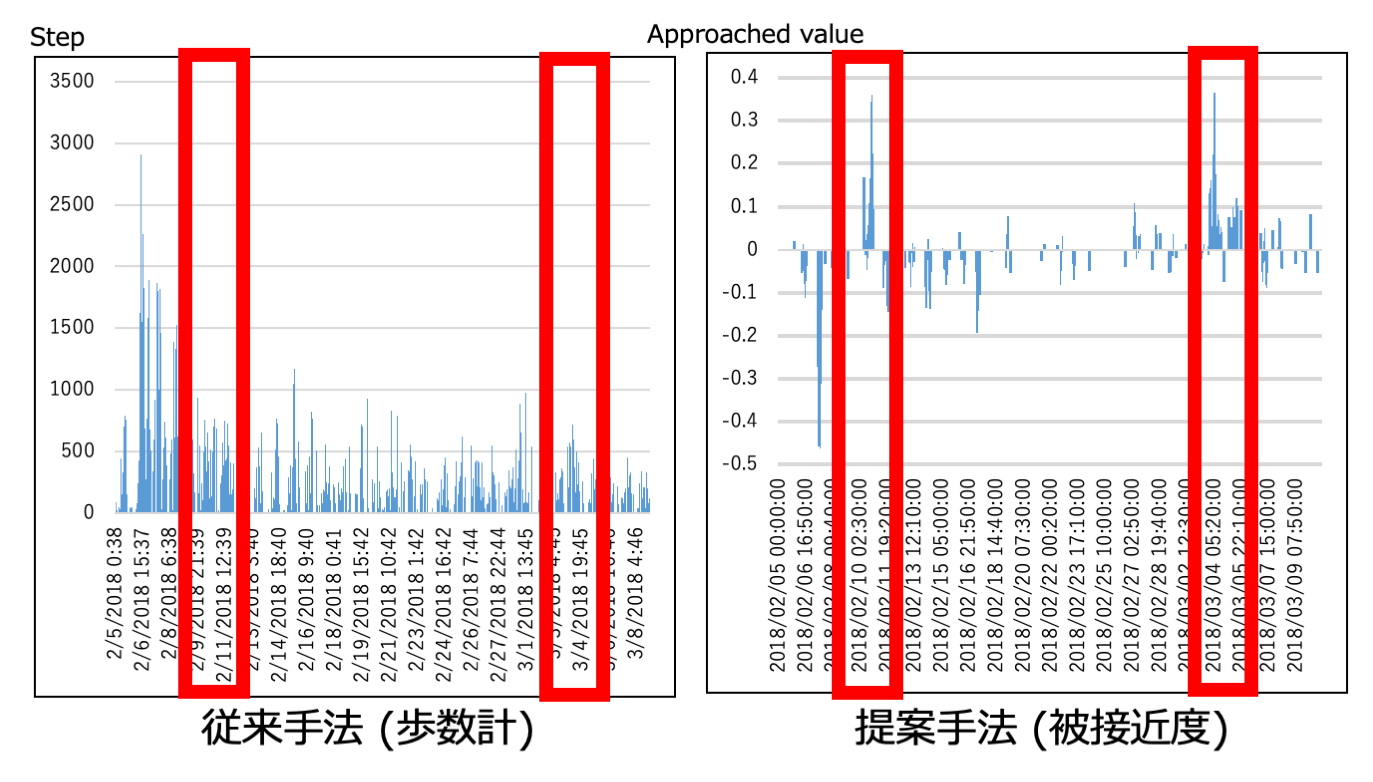
予備実験として,GPSを用いて取得した位置情報を基に本手法を適用し,従来手法では捉えることができなかった発情の検知に成功した事例を紹介する.実験結果のグラフを図31に示す.歩数計による活動量では観測できなかった発情を,本手法で目視によって著しい変化を観測することに成功している.
4.3 インタラクション情報の可視化
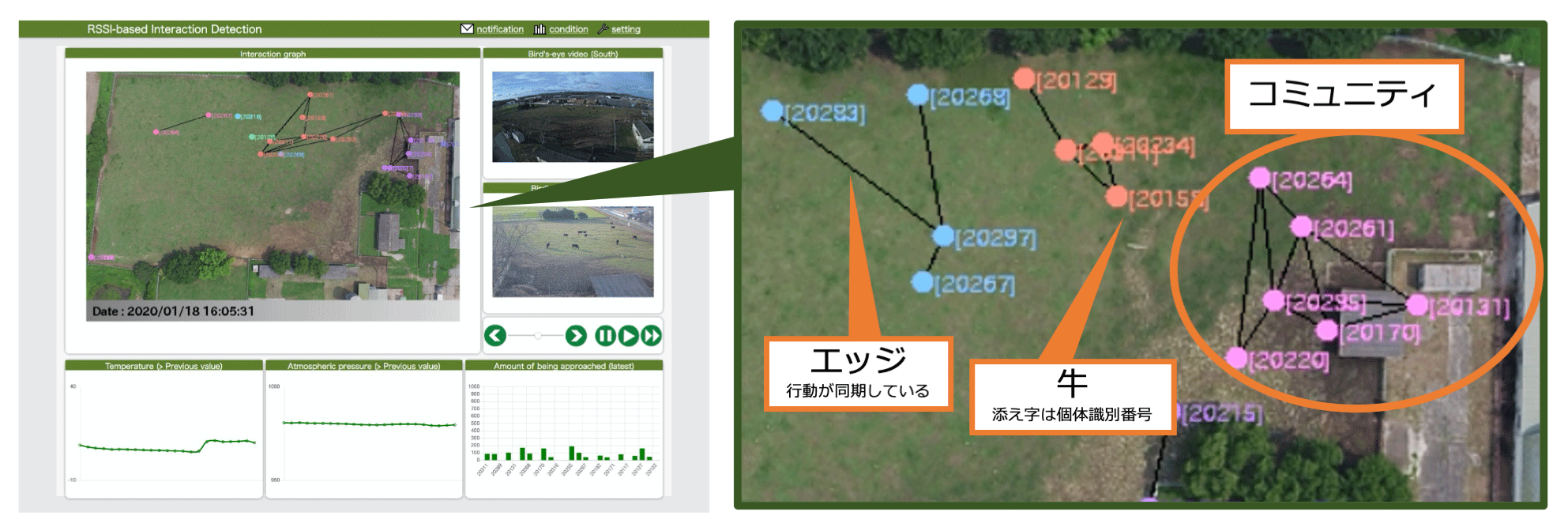
本システムによって抽出されたデータは可視化され,利用者が自由に閲覧することができるWebサーバにアップロードされる.牧場全体と牛ごとの情報のページが用意されており,用途によって選択して利用できる.牧場のページでは,インタラクショングラフを可視化している.キャプチャ画面を図32に示す.実験対象である牧場を上空から撮影した画像の上に,BLEタグから推定した牛の位置情報と個体番号を点と数字で描画する.これらの点を結ぶ線が,行動類似性が高い牛間に結ばれるエッジを表現している.すなわち,この画面ではインタラクショングラフの時間的な移り変わりを描画している.また,牛が所属しているコミュニティを識別するためにコミュニティごとに色で識別を行っている.牛を表現している点の色が同じであれば,同じコミュニティに所属していることを表現している.この画面ではインタラクショングラフと同時刻にネットワークカメラによって録画された放牧地の映像を閲覧することもでき,遠隔地において牧場における牛の行動を常時確認することができる.
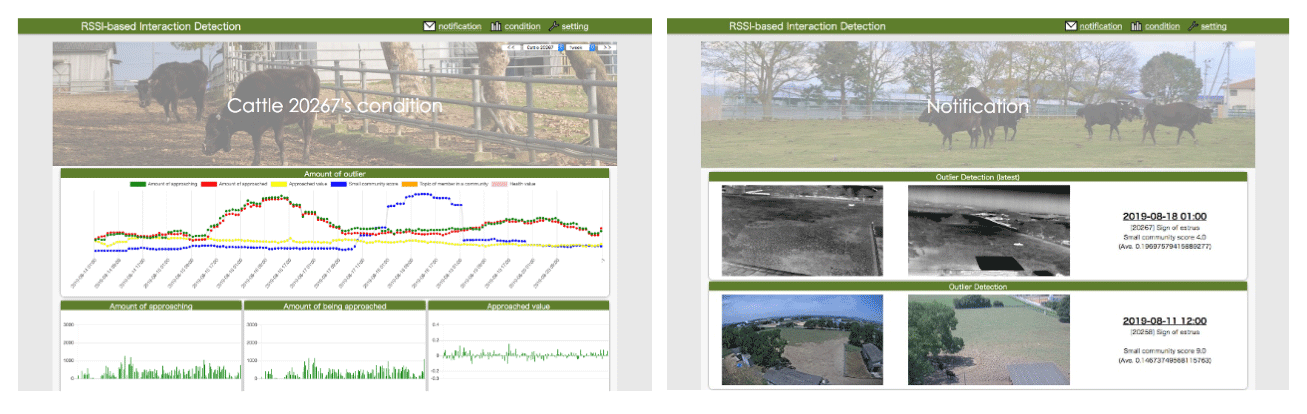
牛ごとの情報ページでは,4.2節の指標をグラフとして可視化している(図33左).このような指標から自動的に発情兆候を検知するために,異常検知手法を用いて過去のデータから最新の日付の値がどれだけ離れているかを異常度として評価する.異常度はグラフ上部に表示しており,閾値を超える値が観測されると通知画面やスマートデバイス上に通知が行われる(図33右).実際にどのような現象が放牧地で起こっているのかを確認するために,異常が検知された時刻においてネットワークカメラにおいて取得している映像が利用者に配信される.これにより,最終的な人工授精等の処置の決定を支援することが可能となっている.
5.適用例と考察
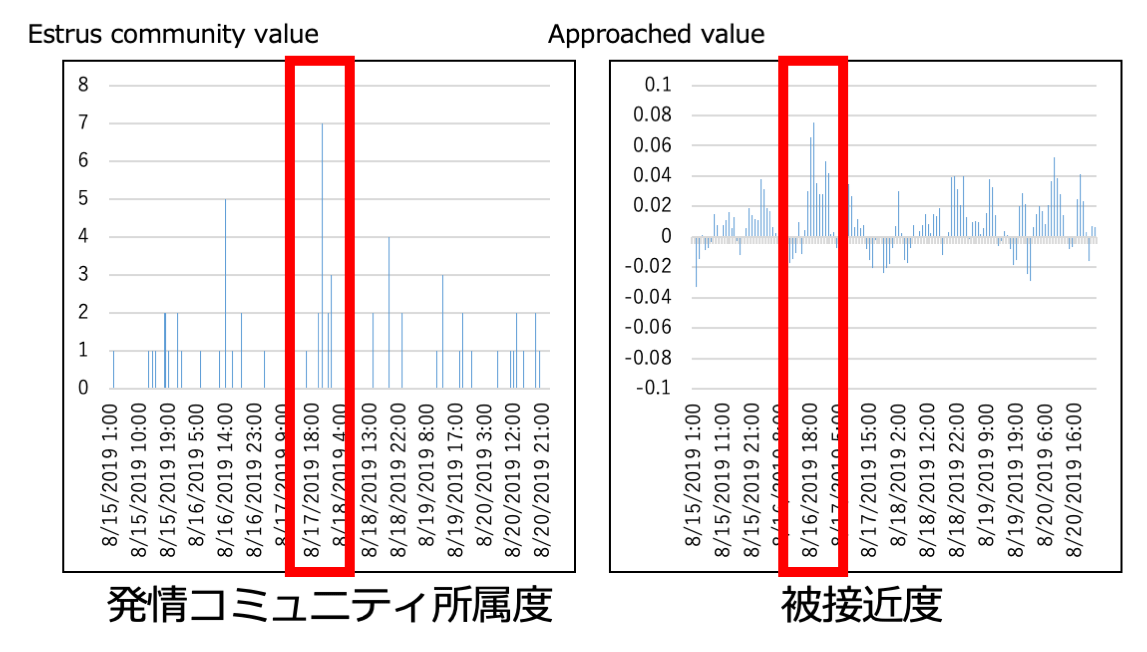
本システムを,目視によって発情が確認された事例に対して適用した結果を示す.対象の事例は,2019年8月17日において個体番号20267の牛に発情兆候が表れたものである.まず,4.2.1項で紹介した特殊なコミュニティを評価する値の結果を図34左に示す.8月17日の夜に大きな値の上昇が確認できる.次に,4.2.2項で示した接近行動に着目した指標の結果を図34右に示す.この指標に関しても,前日に値が上昇していることが確認できる.
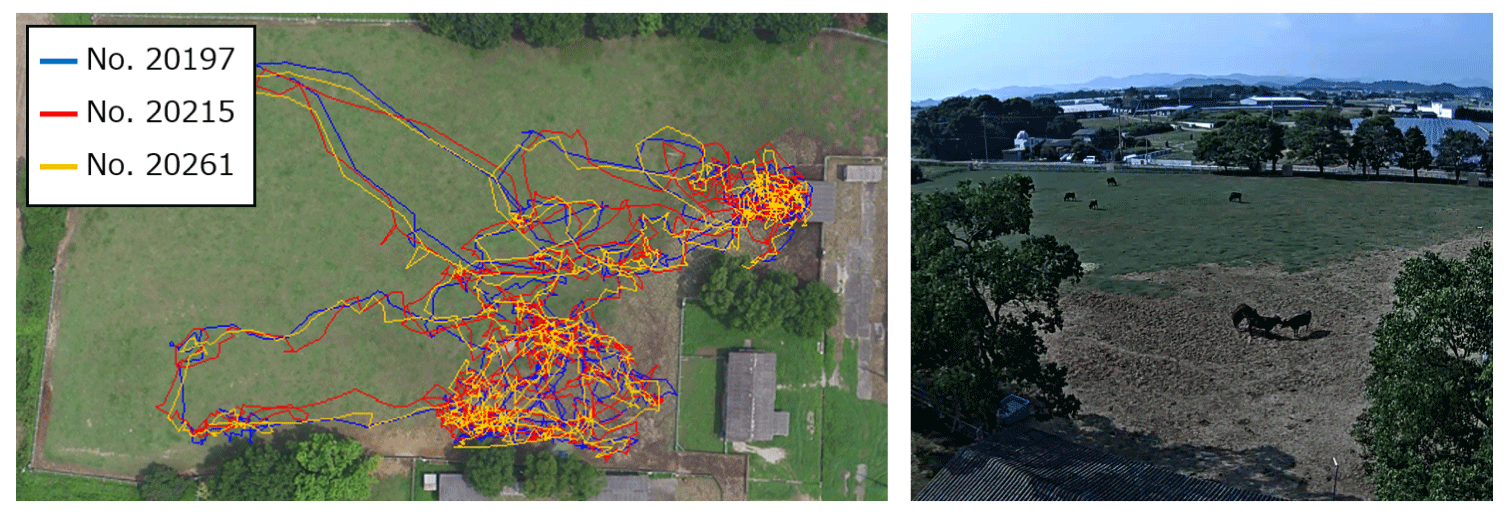
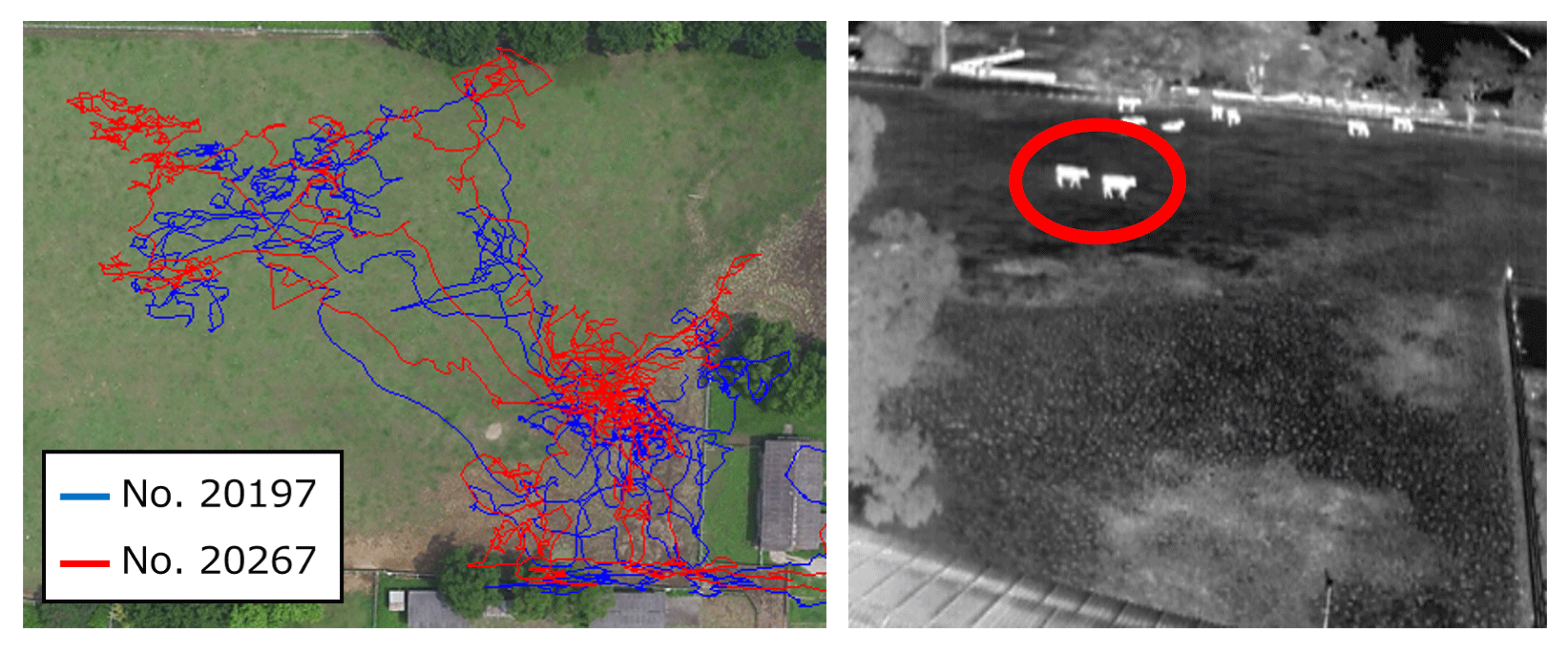
4.2.1項の手法の結果において,特に値の上昇が見られた時間帯において,個体番号20267と20197の牛について4.1節で示した位置推定を用いて算出した移動軌跡を図35左に示す.放牧地中央を横切るように移動した軌跡が数個所見られるが,赤色の線と青色の線がほとんど同じ経路で進んでいることが確認できる.このことから,一定期間にわたって2頭がともに行動していたことが分かる.また,図21と比べて2頭の線が断続的に離れている様子が確認できるが,これは表23に示すような推定誤差が影響していると考えられる.同時間帯における暗視カメラによって取得した同時刻の映像を分析すると,図35右に示すように個体番号20267と20197の牛が追いかけあう形で移動を行っていた.提案手法を用いることによって,このような特別な行動を的確にとらえることに成功したと考えられる.
このように,本システムを用いて実際の発情の検知に成功しており,予備実験を通して見逃された発情を検出することにも成功している.一般に,牛の発情には約21日の周期性があることが知られている.しかしながら,生産性を高めるためには分娩後の発情回帰を早期に捉えることが望ましく,そのような状況では周期性を利用して発情を予測することはできない.また,いったん妊娠したものの途中で胚が死滅した牛,発情が21日ではなくホルモン異常で多発する牛に対する発情の検知も同様に周期性を利用できず発情検知が困難とされてきた.しかも,発情開始時刻は,夜間から早朝にかけて最も多いことが知られており,たとえば,[12]によれば,17時以降から7時までの間の発情開始は全体の70%を占め,17時以降に発情が開始し,翌日7時以前に終了するような,目視による監視がきわめて困難とされる割合は9.2%になる.本システムは,昼間に人間が目視により発見していた発情のみならず,目視観察が困難であった夜間の発情検知にも貢献できる可能性がある.
しかしながら,試作したセンサ首輪には防水性や耐久性に課題が残っており,現時点では長期的なデータを取得することができていない.加えて,発情検知率を評価するためには真の発情を正確に捉える必要があるが,昼夜を問わずすべての牛に対して数カ月単位で目視で観察する必要があり,容易ではない.これらについては,今後の課題として取り組みたい.
6.おわりに
本プロジェクトでは,畜産業務における牛の異常状態の検知に対して,最新ICT技術の活用に加え,従来とは異なる牛の社会性に基づいた視点で分析を進めることによって,新たな方向性を示した.インタラクション情報にもとづく提案手法の予備実験では,本プロジェクトの目的である従来手法では見逃されていた発情兆候の検知に成功した.
構築したシステムにおいて,受信電波強度に基づくトラッキングでは平均距離誤差4.98mを達成しており,実用的な精度を実現することができた.また,推定した牛の位置情報を基に提案手法を用いることで,実際の発情兆候を検知することに成功した.
今後は,実験フィールドを拡大し多数の事例やデータを得ることで,より汎用的なシステムの構築を目指していきたい.その中で,数年レベルの長期運用を行い本システムによる検知精度の検証を行う必要があると考えている.このような検証結果を基にし,アルゴリズムの改善やセンサ首輪等の設備の最適化を進めていき,最終的には事業化へと進んでいきたい.
謝辞 本プロジェクトにご協力いただいた皆様に深謝いたします.なお,本研究の一部は,JST CREST JPMJCR1682ならびにJST CREST JPMJCR1914の支援による.
参考文献
- 1)農林水産省:農業労働力に関する統計 農業就業人口および基幹的農業従事者数,https://www.maff.go.jp/j/tokei/sihyo/data/08.html
- 2)農林水産省:農林水産物輸出入概況(2018年),https://www.e-stat.go.jp/stat-search/files/data?sinfid=000031814030&ext=xls
- 3)首相官邸ホームページ:農林水産業の輸出力強化ワーキンググループ(第10回)畜産物の輸出力強化に向けた対応方向http://www.kantei.go.jp/jp/singi/nousui/pdf/himmoku3.pdf
- 4)広岡博之:ウシの科学,朝倉書店,pp.74 (2013).
- 5)志賀一穂:肉用牛繁殖経営の基礎講座〔I〕―肉用繁殖雌牛の上手な管理法―,公益社団法人 中央畜産会,http://jlia.lin.gr.jp/cali/manage/129/s-semina/129ss2.htm(2020年2月15日現在)
- 6)佐藤衆介,近藤誠司,田中 智夫,楠瀬 良,森 裕司,伊谷原一:動物行動図説―家畜・伴侶動物・展示動物, 朝倉書店, pp. 22-162 (2011).
- 7)Antenna Technology Inc. : 八木アンテナ,http://www.ant-inc.co.jp/ya2412a.html (2020年5月1日現在)
- 8)Antenna Technology Inc. : パッチアンテナ,http://www.ant-inc.co.jp/pa2409s.html (2020年5月1日現在)
- 9)Yamanishi, T., Jikyo, T., Kamada, T., Nishide, R., Ohta, C., Oyama, K. and Ohkawa, T. : A Study on Outdoor Localization Method by Recurrent Deep Learning Based on Time Series of Received Signal Strength from Low Power Wireless Tag, IEICE Commun. Express, Vol.8, No.12, pp.1-6 (2019).
- 10)Yamauchi, Y., Nishide, R., Takaki, Y., Ohta, C., Oyama, K. and Ohkawa, T. : Cattle Community Extraction Using the Interactions Based on Synchronous Behavior, The 9th International Symposium on Information and Communication Technology, pp.227-234 (2018).
- 11)Fukumoto, S., Nishide, R., Takaki, Y., Ohta, C., Oyama, K. and Ohkawa, T. : Detection of Approaching Interaction with Cattle in Estrus Based on Community Transition and Cattle Distance, 12th EFITA International Conference (2019).
- 12)髙﨑久子,大島藤太,宍戸容子,櫻井由美:発情発見システムを活用した生殖器の機能的回復状況推定方法の研究,栃木県畜産酪農研究センタ平成29年度試験研究成果集,pp.19−20 (2018), http://www.pref.tochigi.lg.jp/g70/press_etc/documents/h30nennpou7-11.pdf (2020年3月31日現在)
2018年神戸大学工学部情報知能工学科卒業.2020年神戸大学大学院システム情報学研究科博士課程前期課程修了.
山西雄大(非会員)yamanishi@fine.cs.kobe-u.ac.jp2018年神戸大学工学部情報知能工学科卒業.2020年神戸大学大学院科学技術イノベーション研究科博士課程前期課程修了.
福元駿汰(非会員)s.fuku5@cs25.scitec.kobe-u.ac.jp2018年神戸大学工学部情報知能工学科卒業.同年から神戸大学大学院システム情報学研究科在学中.
治京拓人(非会員)jikyo@fine.cs.kobe-u.ac.jp2018年神戸大学工学部情報知能工学科卒業.同年から神戸大学大学院科学技術イノベーション研究科在学中.
太田能(正会員)ohta@port.kobe-u.ac.jp1990年阪大・工・通信・卒,学士(工学),1992年同院・工・博・前・通信・修了,修士(工学),1995年同院・工・博・後・通信・修了,博士(工学).同年群馬大・工・助手.1997年徳島大・工・講師,2001年同・助教授.2002年神戸大・工・助教授(2003年より1年間・マサチューセッツ大・在外研究員),2007年同院・工・准教授,2010年同院・システム情報学・准教授,2015年同・教授,2016年同院・科学技術イノベーション・教授,現在に至る.センサネットワーク,網資源管理技術,コンテンツ配信技術に関する研究に従事.IEEE会員,ACM SIGCOMM会員,IEICE会員.
西出亮(正会員)ryo-nishide@biwako.shiga-u.ac.jp滋賀大学データサイエンス教育研究センタ准教授.博士(情報学).2008年関西大学大学院総合情報学研究科博士課程後期課程修了後,関西学院大学理工学研究科博士研究員,立命館大学情報理工学部助手・特任助教,神戸大学システム情報学研究科特命助教を経て現職.スマート農業,人流解析,駐車場需要・混雑状況予測等の研究に従事.
大山 憲二(非会員)oyama@kobe-u.ac.jp神戸大学大学院農学研究科附属食資源教育研究センタ教授.1992年宮崎大学農学部卒.神戸大学大学院修士課程・博士課程を経て,1999年から同センタ勤務,2011年から現職.和牛の育種改良,とくに枝肉形質,繁殖形質など経済形質の遺伝的改良に従事.
谷口隆晴(正会員)yaguchi@pearl.kobe-u.ac.jp2004年東京大学大学院情報理工学系研究科数理情報学専攻修士課程修了.同年,同大学助手を経て,現在,神戸大学大学院システム情報学研究科准教授.国立研究開発法人科学技術振興機構さきがけ研究者.数理工学全般,特に,数値解析・数理モデリングの研究と教育に従事.
大川剛直(正会員)ohkawa@kobe-u.ac.jp1986年大阪大学工学部通信工学科卒業.1988年同大学大学院工学研究科通信工学専攻博士前期課程修了.大阪大学助手,講師,助教授を経て,2005年神戸大学大学院自然科学研究科教授,現在,同大学大学院システム情報学研究科教授.日本学術振興会学術システム研究センター主任研究員.博士(工学).知的データ処理,スマート農業,バイオインフォマティクスなどの研究に従事.
編集担当:江谷 典子(Peach・Aviation(株))