自動走行ソフトウェアスキル標準の策定
1.自動走行スキル標準策定の経緯と目的
我が国の自動車産業は,長年にわたり高い国際競争力を維持し,日本の経済・雇用を支えてきた「屋台骨」([2])として重要な産業に位置付けられる.自動車産業では現在,コネクテッドサービス,自動運転,シェアリング,EV☆1化といった個々に大きな変革が同時に進行し,100年に1度と言われる自動車分野の大変革(CASE☆2革命)が進展している.このような劇的な変化に直面する一方で,自動車産業の過去の成功モデルだけでは通用しない新たな競争時代を迎えている.大手IT企業等も参入し,自動車業界の枠を超えた産業横断的な開発アライアンスが不可欠となり,AI・ビッグデータ解析,サイバーセキュリティ等これまで自動車業界には少なかったソフトウェア人材から自動走行の仕組み全体をシステム間の関係性で捉えることができるシステム人材等を,業界横断で育成・獲得していくことが急務となっている.
このような状況下,経済産業省製造産業局と国土交通省自動車局は,2015年2月に「自動走行ビジネス検討会」を設置し,我が国が自動走行において競争力を確保し,世界の交通事故の削減をはじめとする社会課題の解決に積極的に貢献するため,現状の課題を分析し,必要な取り組みを検討することを目的に,産学官オールジャパンで検討が必要な取り組みを検討し,2017年3月に「自動走行の実現に向けた取組方針」を策定した([3]).
「自動走行の実現に向けた取組方針」においては,「ソフトウェア人材」を含む重要10分野を定め,国を挙げた重点的な取り組みが進められている.当該取組方針に基づき,自動走行に焦点を当てた自動車ソフトウェア人材に求められる新しいスキルを中心に,体系的に整理した「自動走行スキル標準☆3」を策定した.
自動走行スキル標準は,自動走行システム全体の技術が進化途上でありながらも,国際的な開発競争が激化する中で,多様なステークホルダーが参加するサプライチェーン・エコシステムにおいて,大枠で共通認識の持てるようなスキル体系のとしての共通語彙を整理することで,我が国の産業界における人材の獲得,育成,活用の検討に寄与するものと期待される.技術やツールの具体的な教育教材等の事例とは異なり,抽象度が高く,具体的,直接的なメリットを感じにくいという難点もあるが,今後,全体を俯瞰しつつバランスを持って人材の獲得,育成,活用の具体的な方策を検討する上で意義のあるステップとして位置付けることができる.
本稿では,自動走行スキル標準という成果物ではなく,自動走行スキル標準の「策定」に関するプラクティスをまとめる.筆者の一部は過去いくつかスキル標準の策定にかかわってきたが,今回は活用されるスキル標準を目指すことを重要視した策定手順を検討した上で自動走行スキル標準を策定した.それを説明する.
2.自動走行スキル標準の策定手順と内容について
2.1 自動走行スキル標準の策定内容について
本スキル標準では,使い続けられるスキル標準の策定を目指し,スキル体系に加え,スキル標準の具体的な活用法を併せて提供するものとした.
まずスキル体系については,自動走行システムの技術は進化の過程にあり,進化に応じて各スキルの体系も変化することが想定されるため,次の手順で策定を行った.
- まず自動走行ソフトウェアスキルの上位階層の全体像を特定した.
- その上で自動車産業界において緊急の必要性が高く,技術が成熟しているとして選定した特定の領域について具体的なスキル定義例を示した.
- スキルとして取り上げる技術項目については,単に項目を羅列するのではなく,全体の工程について確認用のタスク☆4例を提示し,技術項目を当てはめることで,確認を行った.
タスクは個社により異なるものであるので扱いが難しいが,基準となるタスクを設定することは,策定側のみならず確認側の作業を加速するために必要なものと考えた.なおここではタスクとスキルの関係の整理方法で実績のあるiコンピテンシディクショナリ([8],以下,iCDと略す)の考え方も一部導入した.
2.2 自動車ソフトウェアスキル標準策定の既存の取り組みとの関係
自動車ソフトウェア人材の育成・確保の取り組みの成果として,2010年に(一社)JASPAR(以下JASPARと略す)により,自動車ソフトウェアのスキルを体系化したJASPAR版ETSS([4],JASPAR版組込みスキル標準)が策定された.JASPAR版ETSSは,オフショア開発分業を想定して,プラットフォームベースのマルチベンダ型開発を前提としたスキルを体系化したものである☆5.現在CASE革命が進行する中で,10年前に策定されたJASPAR版ETSSに対し,技術の進展を見据えた新たなスキル標準が必要となっている☆6.
スキル標準にはさまざまなものがあり,その構成要素はまちまちである.自動走行ソフトウェアスキル標準は,先行して策定されたJASPAR版ETSSを参考としてその構成要素を検討した.JASPAR版ETSSのベースとなっているのは,IPA版組込みスキル標準(ETSS)であるが,ETSSの構成要素のうち,スキル基準およびキャリア基準のフレームワークを参考にした.スキル基準では,必要なスキルを体系化し,全体共通としてスキルを4段階に分けたスキルレベルを定義している.キャリア基準は,ITSSのスキルレベルに合わせるように試みた各キャリアレベルを職種ごとに設定し,各職種の各キャリアレベルに必要なスキル項目とそのスキルレベルの集合(スキルマップと呼ばれることが多い)を相場感として定義したものである.
2.3 自動走行スキル標準の策定方法
自動走行スキル標準は,有識者委員会の検討,技術動向調査,有識者ヒアリングの結果に基づき取りまとめられた.有識者委員会が検討の中心と位置付け,自動車業界(OEM☆7,サプライヤ),組込みソフトウェアベンダ,自動車業界内外の関連団体,大学等の有識者からなる自動走行ソフト開発スキル標準策定作業部会で議論いただいた.スキル標準検討は,スキル標準を作成してからその使い方を検討するという手順で進めるのではなく,次の手順で進められた.
- スキル標準は,そもそも誰にとってどのようなものにすると有効に活用できるのかという点について部会委員,有識者ヒアリングによりアイディアを抽出する.
- それをユースケースとして整理し,それらの中から重要度が高いと見なされるユースケースによりゴールを明確にする.
- そのゴールに向けて有効なスキル標準となるように具体化を行う.
最上位のスキル階層においては,自動走行ソフトウェアのスキル全体を網羅しつつ,JASPAR版ETSSからの差分を対象として,技術動向調査,有識者意見を参考に主要なスキル項目を特定し,スキル標準策定部会での議論,有識者ヒアリングに基づき網羅性の検証,スキルの粒度設定等の妥当性を検証した.また得られた最上位スキル項目の第1階層に対して,技術の成熟度,緊急性,必要性の状況に基づきETSS同様に今回も3領域に分類してさらに詳細化・具体化を行った.
他方,スキル標準は作って終わりではなく,各社で活用されて初めて価値を見出すものである.過去に作成された他業界でのスキル標準には「スキル基準」の定義だけでなく,同時に活用例をガイドとして示すことで普及・啓発を企図したものが少なくない.今回は,スキル標準の一部として活用例も作成することとした.
3.スキル標準の策定
3.1 新しいスキル標準の基本コンセプト
新しいスキル標準を策定するにあたり,大きな視点から目指すべき方向性を定めることが重要であるため,基本コンセプトの検討を行った.その結果,整理された基本コンセプトが図1である.
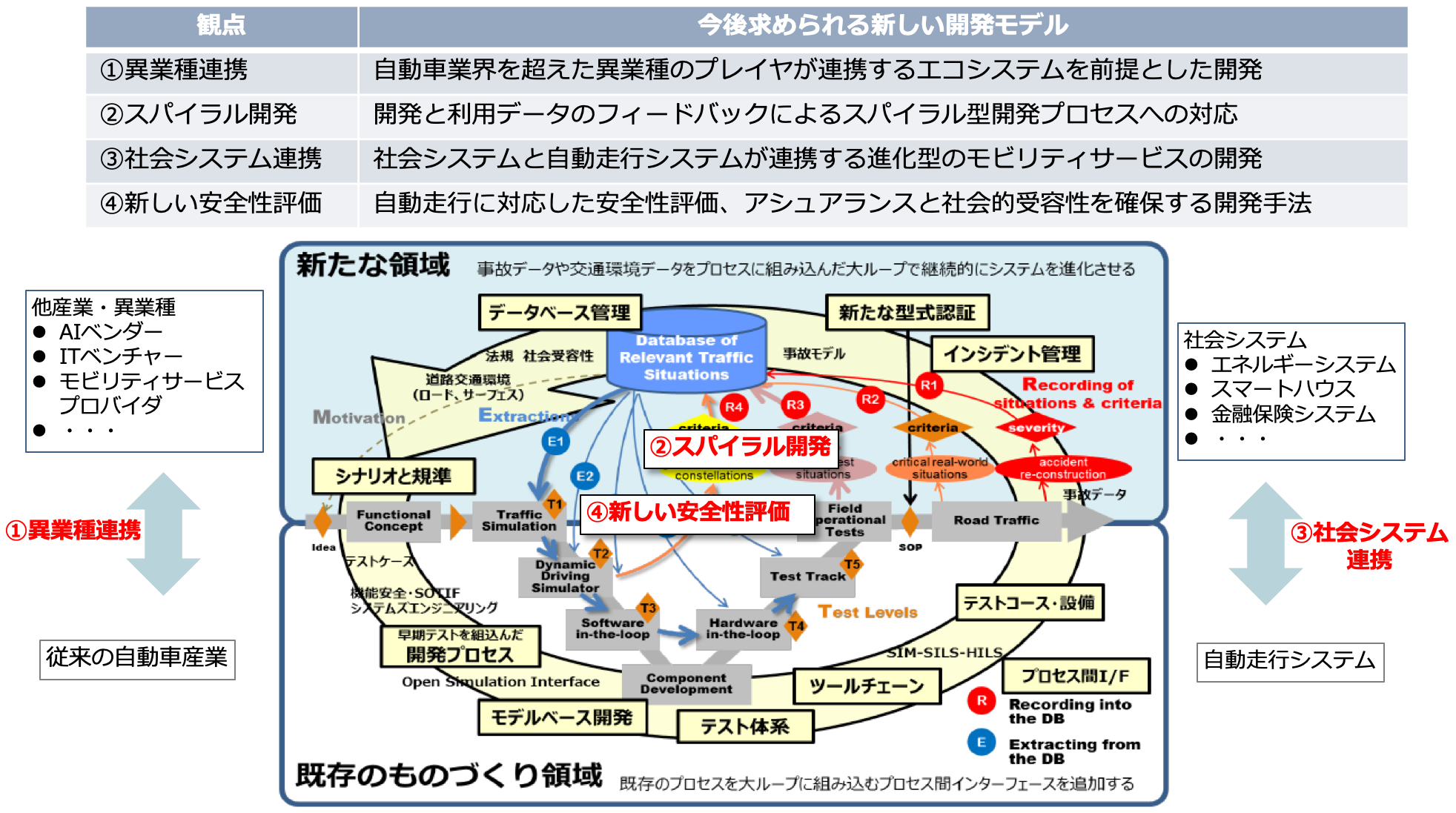
図1 自動運転時代に求められる新しいスキル標準の基本コンセプト
自動走行に焦点を当てた新しいスキル標準に求められる重要な観点として,自動走行システムの実現には従来の自動車業界を超える産業横断的なエコシステムによる総力が求められていることが挙げられる.AI・ビッグデータ解析を専門とするベンダ,ベンチャーや,サイバーセキュリティを専門とするベンダ等自動車業界にとどまらない,他産業にわたる中で最先端の企業と連携することが不可避と考えられる☆8.
自動走行システムにおいては,製品出荷後の運用・保守フェーズにおける走行データ,事故データ,セキュリティ情報等を常時蓄積するデータベースを活用し,自動走行システムの開発進化にフィードバックするスパイラル型開発が求められる.また自動走行システムにとどまらず,エネルギーシステム,スマートハウス,金融システム等,異なる領域の社会システムとの連携も求められるようになる.さらには自動走行システム以前の従来の安全性評価法では,莫大な検証コストが求められることになり,運用・保守フェーズにおいて蓄積されるデータベースを活用し,シミュレーション技術を活用したバーチャルテスト,フィジカルテストの両方を総合した現実的なコストで実現できる新しい安全性評価基準が求められる.
これらの要求に対応した新しい開発対象と開発方法に対応したスキルを体系化することを基本コンセプトとしてスキル標準を策定することとした.
3.2 スキル標準の構成
自動走行スキル標準とJASPAR版ETSSの関係を基に全体像を示したものが図2である.
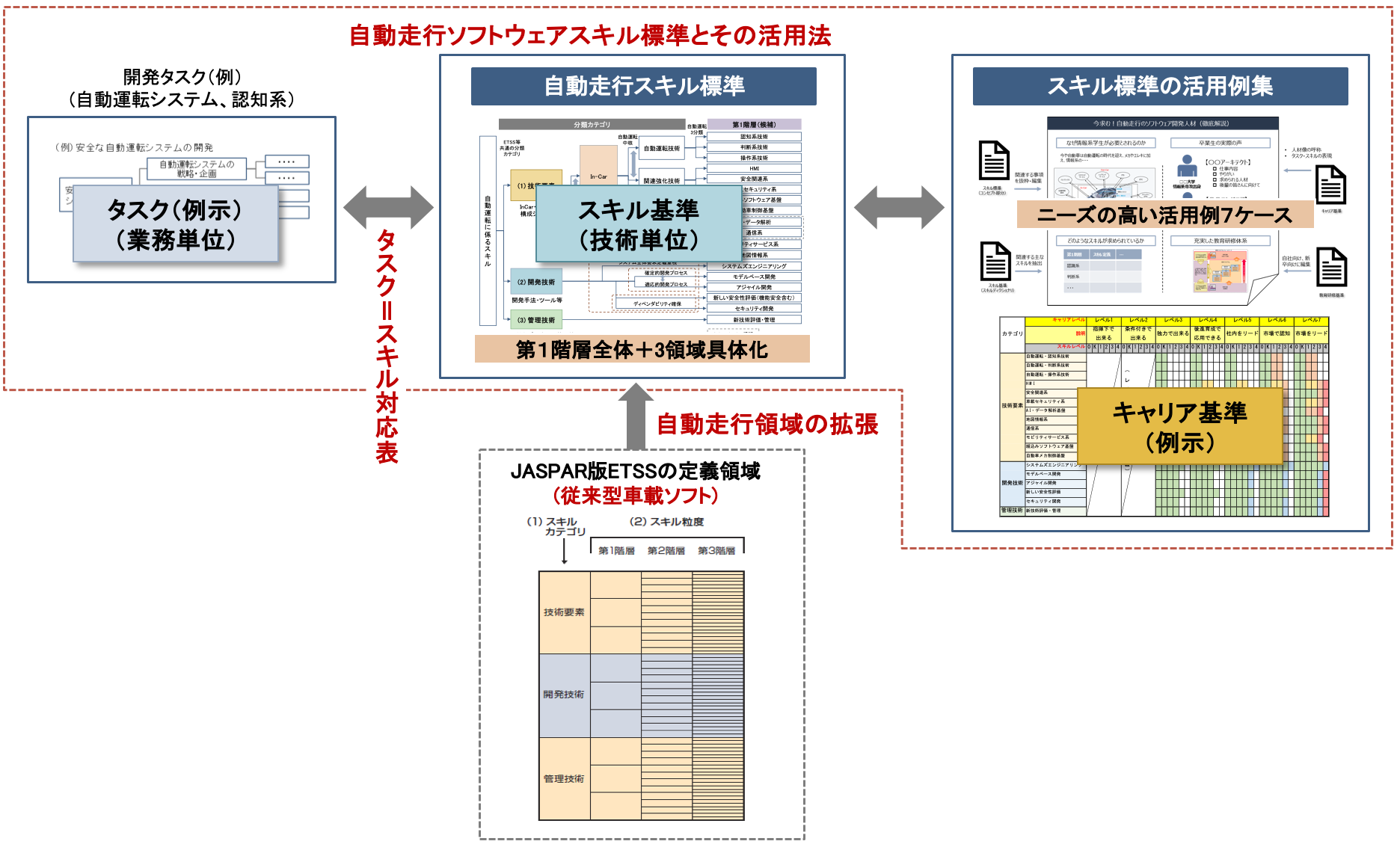
自動走行スキル標準では,JASPAR版ETSSから新たに求められるスキルの差分について自動走行に焦点を当てスキルを体系化したスキル基準を定義する.
自動走行スキル標準の特徴として,自動走行システム開発で求められる具体的な業務を体系化した例をタスク体系として示し,タスク体系を構成する各タスクからスキルを整理し,関係性を確認している.タスク体系は,個社ごとに固有の競争領域に相当するため標準化は難しく,ここではあくまでも例として位置付けている.この手法はたとえばiコンピテンシディクショナリ(以下iCDと略す)でも見られるアプローチである.
なお,キャリア基準については,一般化することは行わず,活用法の中で,特定の職種を挙げ,必要とされるスキルとスキルレベルの分布の例示として表現することにとどめている.
3.3 スコープ(対象範囲)
自動走行システムは,車外の環境インフラも含む大規模な複合システムである.スキル標準を策定するにあたりスコープ(対象範囲)を明確化することが重要である.
スコープは,システム構成および開発プロセスの両面から定義する.
本スキル標準は,自動走行システムを中心としたスキル領域を対象範囲とし,自動走行にかかわる周辺領域は,知識領域として一部カバーする.
想定する自動走行システムの構成を図3のとおりとした.このシステム構成は,自動走行にかかわる各種検討([6],[7]等)や部会での検討に基づき整理したものである.自動走行システムを実現するためには,車両内システム(In-Car)と車外システム(Out-Car)の全体の総合システムをカバーすることが重要である.
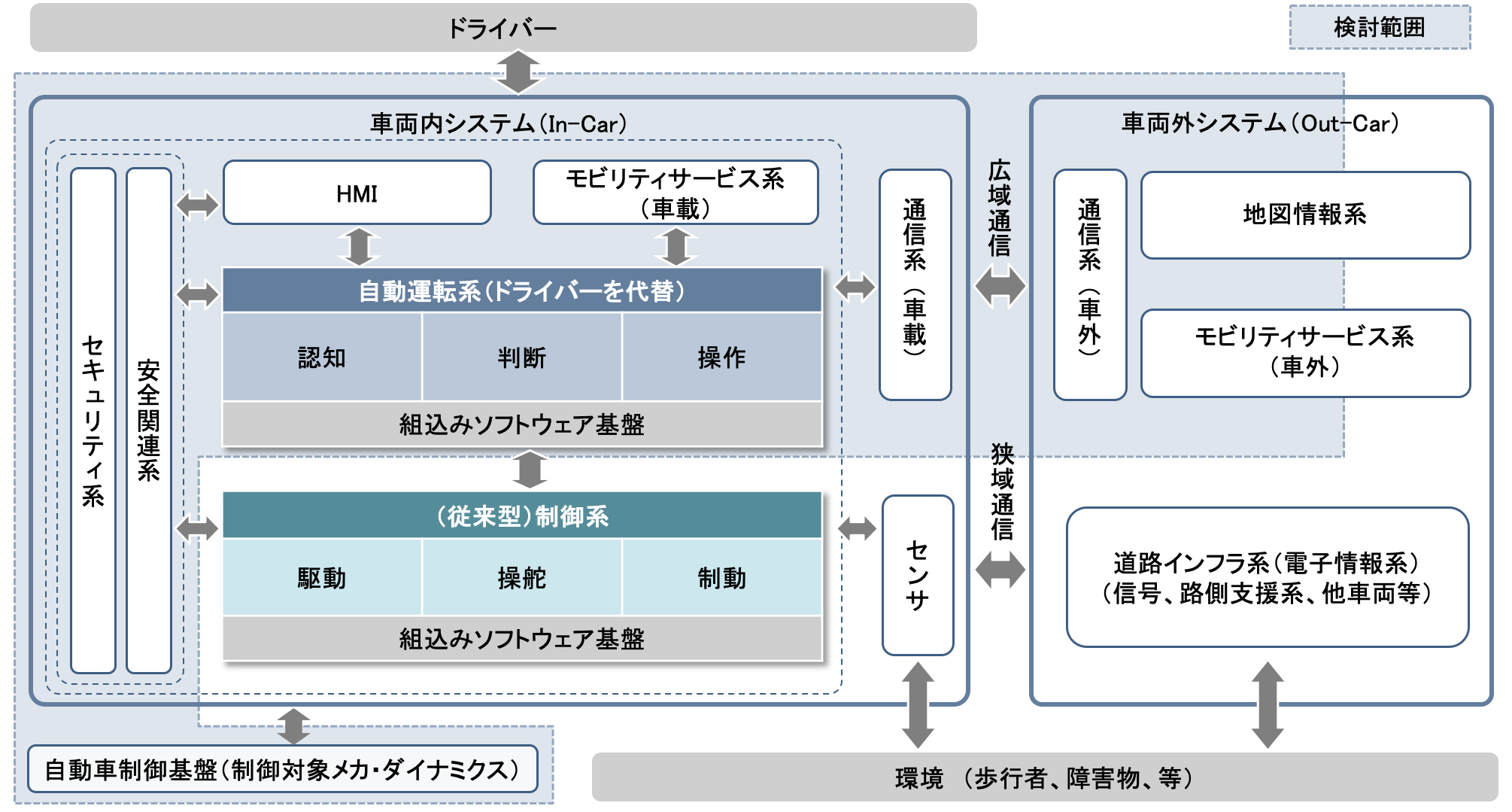
In-Carにおいては,自動走行の中核となる自動運転系は,従来の制御系の基本となる駆動系,操舵系,制動系の上位に位置し,従来,人が担っていた認知,判断,操作を代替する統合的なシステムとなる.これらのシステムは,通信系を経由して,Out-Carの地図情報系,モビリティサービス系等とも連携して統合的な機能を実現する.Out-Carとの連携が重要となることから,システム全体にかかわる安全関連系,セキュリティ系も不可欠となる.また自動車固有のメカ・ダイナミクス制御や組込みソフトウェア基盤は,従来の自動車においても必要であったが,自動走行においても性能品質の確保,開発生産性の向上等のため不可欠であるためスキル標準のスコープに含める.
システムライフサイクルプロセスの観点から見ると,自動車システム全体のライフサイクルプロセスのうち,少数のトップ人材ではなく,開発規模を伴う量産開発および,自動走行において比重が高まると見られる保守サービスのフェーズもスコープとする.
3.4 第1階層の構成と考え方
スキル標準を策定するにあたり,図3について自動走行システム全体をカバーし,JASPAR版ETSSに含まれない領域を対象に,技術の洗い出しを行い,図4のようにスキル第1階層をまとめた.
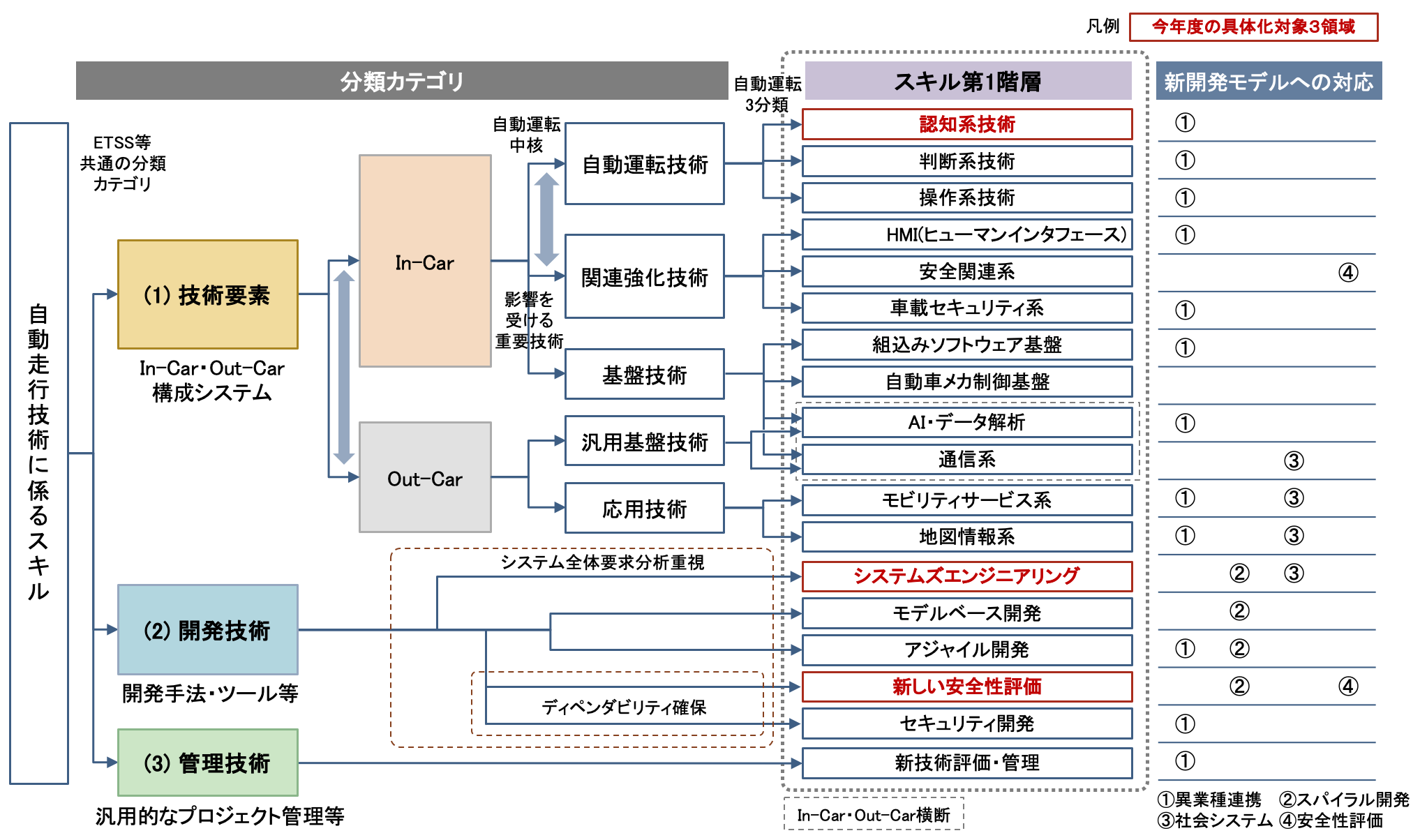
スキル標準の大分類を示すカテゴリは,ETSS,JASPAR版ETSSを踏襲し,(1)技術要素,(2)開発技術,(3)管理技術に分ける.(1)技術要素は,搭載されるシステムにかかわるスキルでありIn-Car,Out-Carの双方にわたるものである.(2)開発技術は,技術要素を開発するための手法やツールに関するスキルである.ただし,できる限り外部でも定義されているスキル定義を参照できるようにしたため,ETSSの管理技術の一部も含むようになった☆9.(3)さらに管理技術は,ETSSの管理技術より広く,エンタプライズなプロジェクト管理にかかわるスキルとした☆10.これらのカテゴリでも,技術という用語が用いられるが,技術そのものというより,それらの技術を使いこなして開発することができるスキルを対象としている点に留意が必要である.
技術要素は,In-CarとOut-Carに大きく分けられる.In-Carは,自動走行の中核である認知系,判断系,操作系から構成される自動運転技術,自動運転の実現により影響を受ける重要技術としてHMI,安全関連系,車載セキュリティ系,および基盤技術から構成される.Out-Carは,汎用基盤技術と応用技術に分かれ,汎用基盤技術は,自動運転に限定されない汎用技術としてのAI・データ解析,通信系があり,応用技術は,自動走行を支える地図情報系とモビリティサービス系から構成される.
開発技術は,開発手法・ツールと関連して体系化が進むアプローチを単位として,自動走行の新領域をカバーするように設定した.複雑化が進むシステム全体の要求と設計を重視したシステムズエンジニアリング,モデルの活用を中心として上流における検証を重視したモデルベース開発,要求が確定しない中で俊敏に開発を進めるアジャイル開発のほか,安全性とセキュリティを確保するスキルを含めている.これらはいずれも幅広いスキルを含んでおり,相互に重なりを持つが,スキルとしてそれぞれが体系立てられているため採用した.
管理技術に関しては,技術が発展している分野を対象としていることから,AI・データ解析等新技術を特定し,有効性を評価検証するとともに,既存の開発プロセスに導入するために必要な技術を,新技術評価・管理技術として含めた.
これらのスキル第1階層により基本コンセプトに示した①~④をカバーすることができその対応関係を図中右側に示している.
3.5 スキル項目の詳細化・具体化対象の選定
図4のスキル第1階層のうち成熟度,人材確保の緊急性等から具体化するスキル項目を対象に詳細化・具体化を図った.自動走行においては技術が成熟していない領域が存在するが,技術が成熟しておらず進化の過程にあると,具体化したスキルはすぐに陳腐化する可能性がある.また,技術情報や文献がそろっていない場合には,業界として標準的なコンセンサスを確立することが難しい可能性があることに留意し,スキル標準の詳細化・具体化対象のスキルと選定理由は次のとおりである.
- ①認知系技術
ADAS等の実用化により技術が成熟しており,具体的な議論・検討が進めやすい. - ②システムズエンジニアリング
有識者のニーズが高く,Out-Car・In-Carのシステム全体の複雑化への対応において重要性が高い. - ③新しい安全性評価
自動走行の実用化に不可欠で,新しい考え方の導入が必要であり重要性が高い.PEGASUS([10])等の材料がある.
3.6 スキル項目の詳細化・具体化
スキル標準第1階層のうち,前節において選定したスキル第1階層3項目を対象に,スキルの詳細化・具体化を行った例を示す.
3.6.1 スキル詳細化・具体化のアプローチ
スキルの詳細化・具体化においては,技術動向調査に基づき関連するスキルを抽出し,それらを階層的に体系化するとともに,自動走行システムを開発するためのタスク(仕事・業務)の具体例を想定して,それらとの関連性の高さからスキル要素を選択することで,共通して求められる主なスキルを体系整理した(図5).
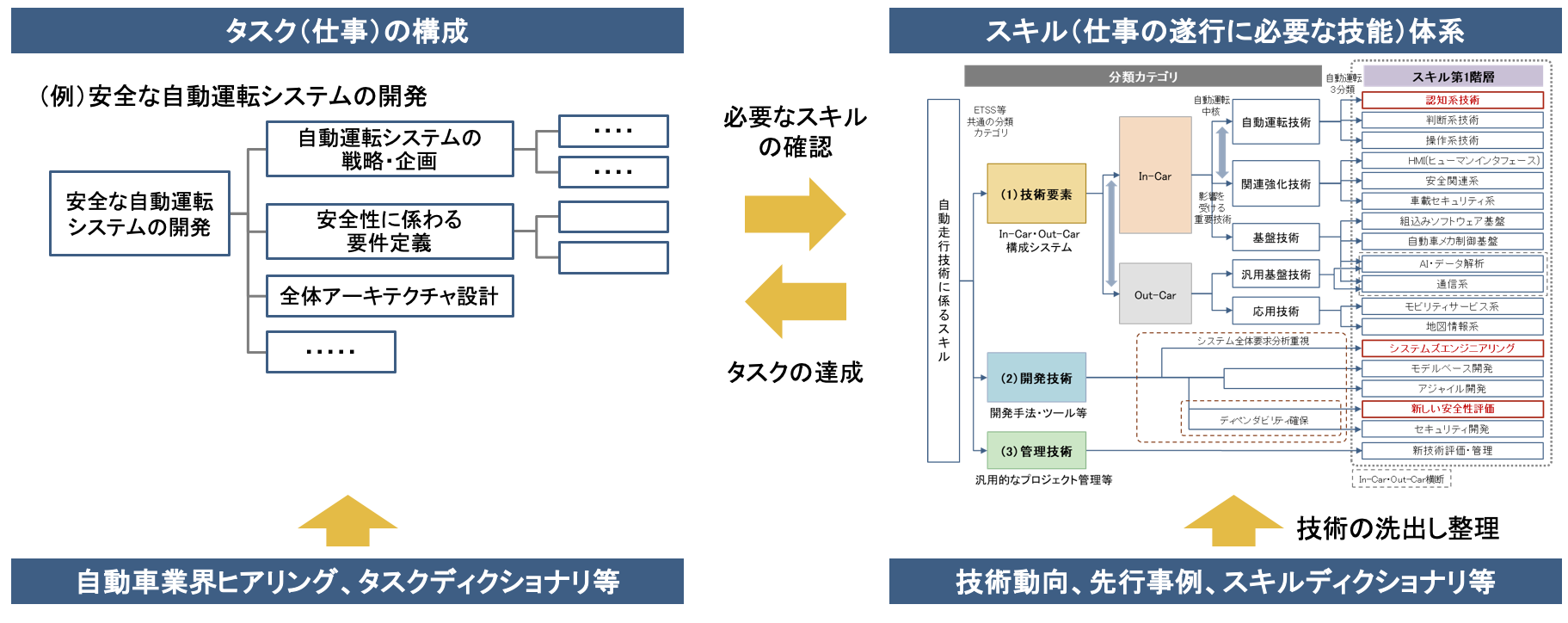
タスク(仕事)の視点からスキルを整理するアプローチは,iCDにおいても見られる方法である☆11.タスクの視点からスキルを整理するために,具体例としてタスクの体系化を行うとともに,技術動向,先行事例,iCD等に基づきボトムアップにスキル項目を抽出整理する.
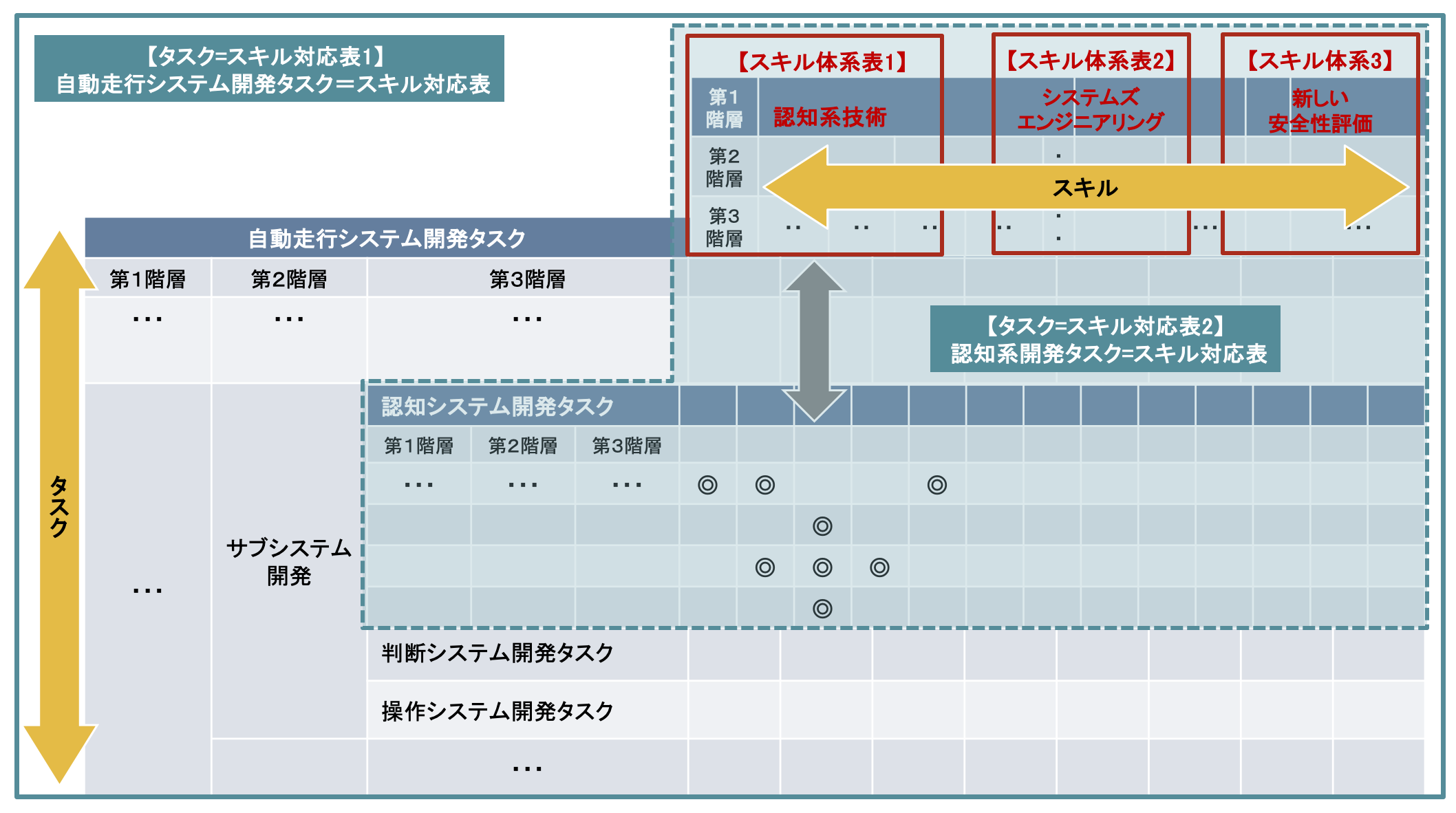
作成したスキル体系表とタスク=スキル対応表は相互に関係があり,それらの表の関係を示した全体像は図6のとおりである.スキル体系表1~3は赤枠で示したものでスキルのみの体系を示したものである.タスク=スキル対応表1は,自動走行システム全体のタスク体系とそれに必要なシステムズエンジニアリングのスキル体系とその他のスキル第1階層の対応関係を示したもので,タスク=スキル対応表2は,認知システム開発タスクの体系と認知系技術のスキル体系の対応関係を示したものである.
3.6.2 スキル項目のレベル定義
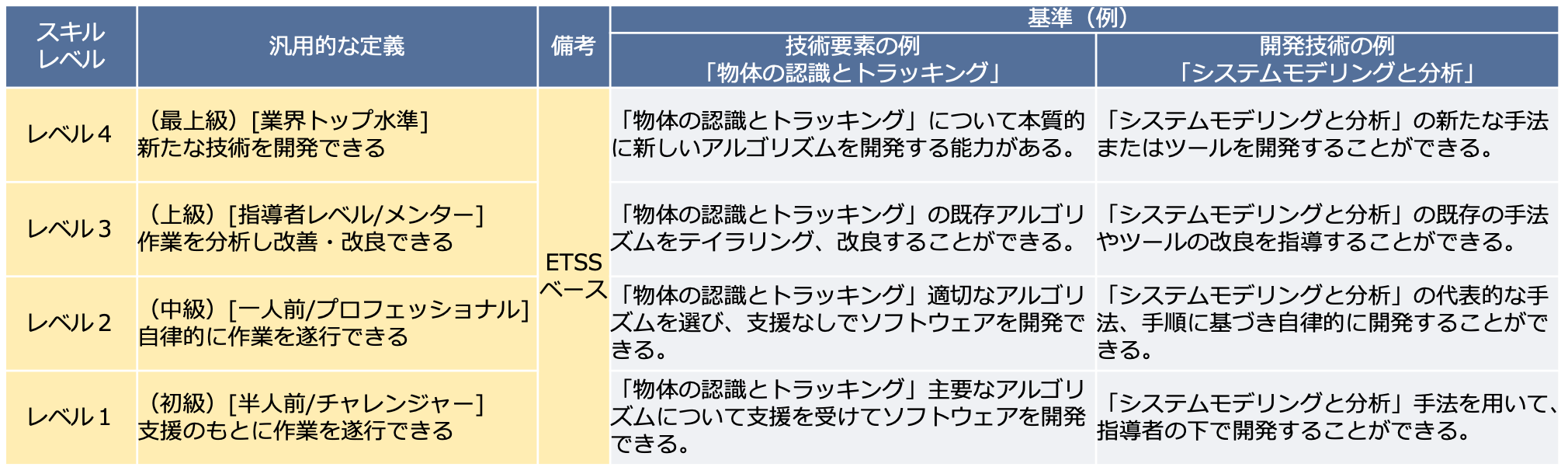
体系化したスキルについて各スキル項目のレベル定義について示す.ETSSスキル標準においては,個々のスキル項目について具体的にレベル定義するのではなく,すべてのスキル項目に対応した一般化したレベル定義が示されている.
本スキル標準では,一般化したレベル定義に加え,典型的なスキル項目について具体的なレベル定義の仕方が分かるように例を示す.実際の運用においては,これらの例を参考に,個々のスキル項目についてレベルを診断するための基準となる定義を与えることもできる.
具体的なスキルレベル定義は以下のような点に基づき定めた.
- 先行するETSSスキル標準の汎用的なレベル1~4については整合性を確保する.
- 技術要素,開発技術ともに技術に対する能力を示す基準として定義する.すなわち,「~できる.」という形式で定義する.
- 技術要素については,アルゴリズムに関する能力を基準として定義する.
- スキル項目のベースとして技術を位置付け,技術を使って開発できることをスキルとし,技術を知っていることを知識として,スキルと知識を区別して定義する.
- 大学等で知識を学習した人材についてスキルに置き換えてスキルレベル0や0.5と表現することがあるが,本スキル標準では学習者のモチベーションを高めるため,あえて知識レベルとして表現する.
以上のような条件に基づきスキル項目のレベルを定義したものを表1,表2に示す.

4.スキル標準の活用法
4.1 活用法の位置付け
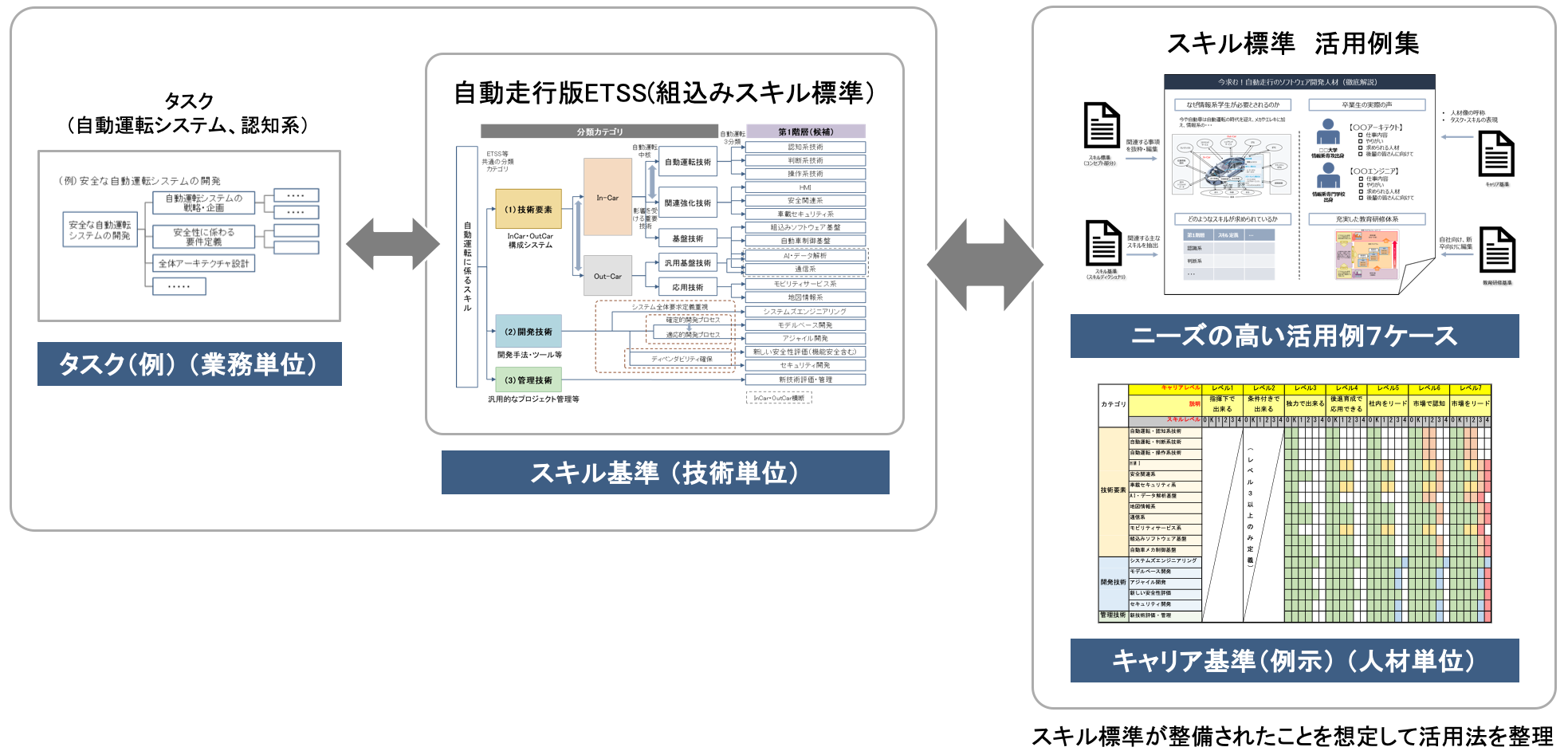
スキル標準の活用法は,スキル標準を誰がどのように活用するかの例について具体的に示したものである.最初の段階で検討したスキル標準のユースケースに関するニーズに基づき具体化した(図7).
4.2 スキル標準に関するニーズ
実用的なスキル標準を策定することを目的として,最初にスキル標準のユースケース(活用法)について検討した.その結果に基づきスキル標準に対するニーズを特定し,スキル標準(特定のスキル3領域)を策定後,スキル標準の活用法について具体的な例を作成し,有効性や改善案を検討した.
スキル標準に関する主なユースケースについて整理したものが以下のとおりである.
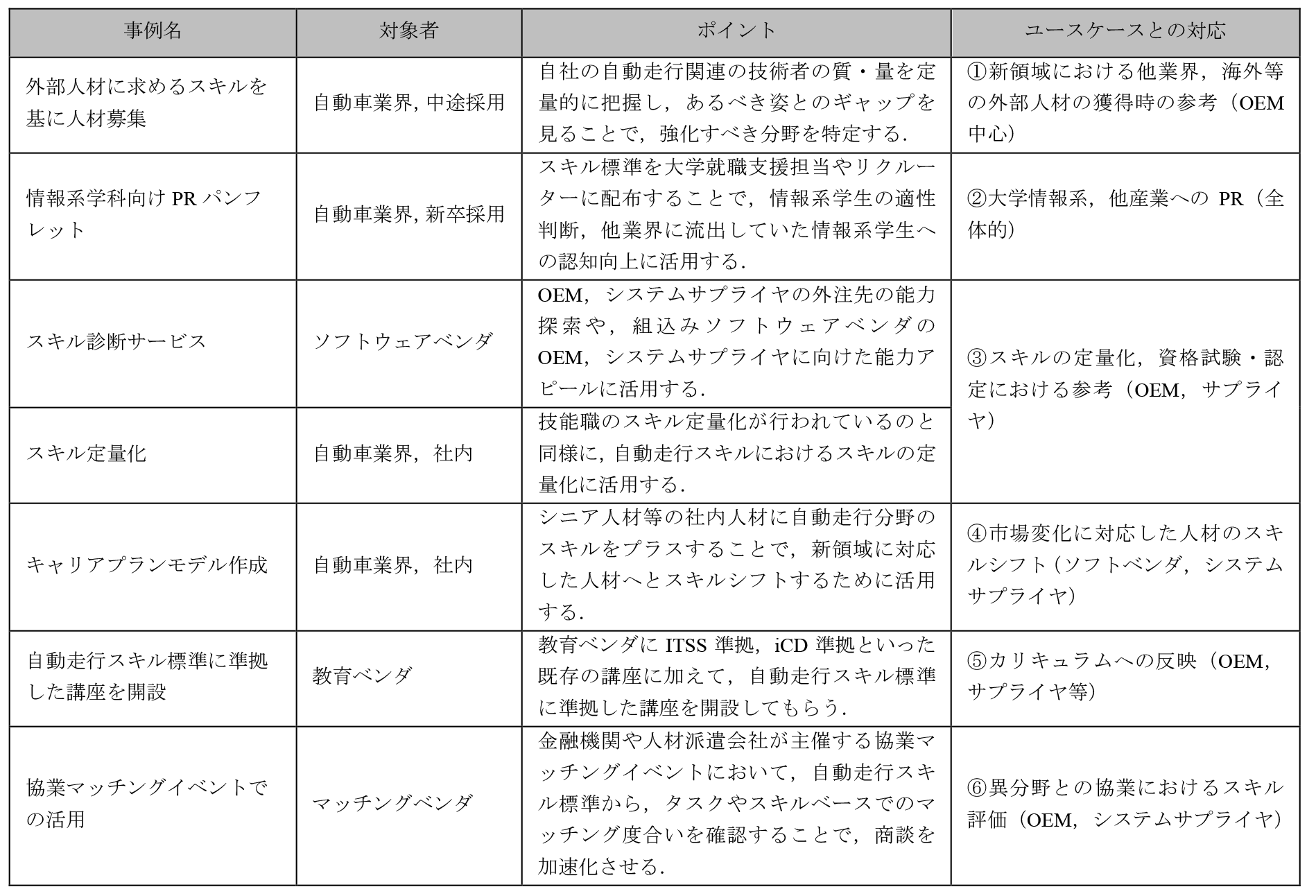
①新領域における他業界,海外等の外部人材の獲得時の参考(OEM中心)
- 外部人材に求めるスキルを基に人材募集
自社のスキルポートフォリオと自動走行に求められるスキル標準のギャップ分析,外部から獲得したい中途採用の人材に必要なスキルを明確化し,自動車業界への求人票を作成
②大学情報系,他産業へのPR(全体的)
- 情報系学科向けPRパンフレット
大学情報系学科等に自動車業界が求めているスキルをパンフレット化して配布
③スキルの定量化,資格試験・認定における参考(OEM,サプライヤ)
- スキル診断サービス
コアコンピタンスを対外的に示したいソフトウェアベンダのスキル診断を行う民間サービスを推進 - スキル定量化
社内資格試験による知識レベルの可視化や,実績経験,面接,実技等によるスキルレベルの定量化に活用
④市場変化に対応した人材のスキルシフト(ソフトベンダ,システムサプライヤ)
- キャリアプランモデル作成
自動走行システム開発に必要な新領域のスキルを提示,関連分野の開発プロジェクトにおいてマネージャとして活躍してもらうため,スキルシフトの計画立案
⑤カリキュラムへの反映(OEM,サプライヤ等)
- 自動走行スキル標準に準拠した講座を開設
情報系カリキュラムと自動走行スキル標準のギャップ分析を行い,不足分を新領域カリキュラムとして追加整備,また専門学校や教育ベンダで活用
⑥異分野との協業におけるスキル評価(OEM,システムサプライヤ)
- 協業マッチングイベントでの活用
スキル標準をベースに協業マッチングイベントにおいて,自動車関連企業,異業種企業(AIベンダ,ITベンダ等)のコア技術領域を可視化して商談化
4.3 スキル標準の活用法
スキル標準の活用法を表3にまとめた.
5.キャリア基準の定義例
キャリア基準は,特定の職種(キャリア)に対して求められるスキル項目とそれらの達成すべきレベルの集合により定義したものである.本スキル標準では,キャリア基準については例示として活用法の中に含めることとした.
図8に自動運転・認知エンジニアのスキル分布例を示す.自動運転・認知系エンジニアは,自動走行システム開発における主要な要素である自動運転・認知系システムのソフトウェア設計,実装,単体テスト等を行う職種である.

自動運転・認知系エンジニアは,総合型の人材ではなく,認知システムの開発において,特定のスキルを深く使いこなす能力が求められる職種である.
6.スキル標準に対する簡単な考察とおわりに
最後にスキル標準について簡単な考察を行う.ここではスキルレベルの定義について考えてみる.自動走行スキル標準を実際に策定することで,この分野は技術要素が充実していることが分かった.今までどちらかと言えば開発技術に偏りがちだったソフトウェア開発のスキル要素が,本スキル標準の技術要素のスキルをアルゴリズムとして表現することで,説明しやすくなっていることは注目すべきことである.技術要素のスキルレベルの説明は,ブルームのTaxonomy(たとえば[9],改訂版ブルーム分類学:①記憶,②理解,③応用,④分析,⑤評価,⑥創造)にもうまく対応付けて説明することも可能で,教育の達成基準としての理論的な背景を与えることができる.また大学でも知識を学習することが可能であることが明らかで,大学での研究成果をより直接的に反映できる可能性がある.このことはドイツのような大学と企業の関係が深い国ではより優位になり得る要素であるが,我が国のように「DX時代」という言葉自身,一部の大学・研究機関を除いて学術機関に響きにくい状況であることを考えると,そのような国との間に何らかの差が発生する可能性もある.
以上、自動走行スキル標準策定のプラクティスについて論じてきたが,それらをまとめると次のとおり.
- スキル標準の策定には,利用者およびユースケースを洗い出し,それに基づきでスキルを定義し,さらにスキル標準の活用方法を伴ってまとめることとした.
- スキル定義の検討に際し,タスク例を定義した上でスキルとの対応付けを行うことで,確認が容易になった.
- 広範囲の技術を対象としているため,スコープを明確化することが重要であった.
- 技術が進化している分野であるため,まずスキルの第1階層を定義し,その上で緊急性があるものについて,第2階層以下を定義した.
- 新しい技術要素についてはアルゴリズムとして表現することがフィットした.逆にアルゴリズムとして定義することで,ブルームのTaxonomyとの対応付けが可能で教育の達成について理論的な背景を与えた.
- 従来型技術も必要であることから,すでに定義しているJASPAR版ETSS等を活用した.また新技術でも外部で定義されているものがあれば活用するようにした.
自動車産業の大変革(CASE革命)が進展する中,自動走行ソフトウェアにフォーカスしたスキル標準の策定に取り組んだ.自動車ソフトウェアの開発は,技術の進歩と人材の育成が両輪のように求められるもので,いずれか一方だけでは健全な発展は望めない.自動走行ソフトウェアスキル標準は,その両面にまたがる重要な要素である.ただし自動走行ソフトウェア分野は,急速な進化の途上にあるため,技術の成熟度を見極めながらスキルの体系化を進めることが妥当である.
謝辞 本稿は,経済産業省の委託を受けて(株)三菱総合研究所が実施した「平成30年度高度な自動走行システムの社会実装に向けた研究開発・実証事業(自動走行に関するソフトウェアスキル標準策定に係る調査)」の調査結果及びその成果である経済産業省「自動走行ソフトウェアスキル標準(2018年度検討結果)」([1])を基にプラクティス論文として取りまとめたものです.本稿の作成にあたり,自動走行スキル標準策定にかかわられた主要なメンバであります自動走行ビジネス検討会人材戦略WG自動走行ソフト開発スキル標準策定作業部会の委員の皆様,経済産業省製造産業局自動車課ITS・自動走行推進室の皆様には,当該スキル標準のとりまとめに至るまで非常にお世話になりました.皆様には深く感謝を申し上げます.
参考文献
- 1)経済産業省:自動走行ビジネス検討会人材戦略ワーキンググループ,自動走行ソフトウェアスキル標準(2018年度検討成果), https://www.meti.go.jp/shingikai/mono_info_service/jido_soko/jinzai_senryaku/20190408_report.html
- 2)経済産業省:第1回自動車新時代戦略会議 事務局提出資料,資料1(2018).
- 3)経済産業省,国土交通省:自動走行ビジネス検討会─報告書「自動走行の実現に向けた取組方針」Version2.0 (2018).
- 4)JASPAR:JASPAR版ETSSガイド ver.1.0, https://www.jaspar.jp/regist/63/disclosureDocument
- 5)JMAAB:スキル・キャリア基準(ETSS-JMAAB), http://jmaab.mathworks.jp/free/index.html
- 6)内閣府:戦略的イノベーション創造プログラム(SIP)自動走行システム 研究開発計画, https://www8.cao.go.jp/cstp/gaiyo/sip/keikaku/6_jidousoukou.pdf
- 7)JARI:平成27年度戦略的イノベーション創造プログラム(自動走行システム):V2X等車外情報の活用にかかるセキュリティ技術の研究・開発プロジェクト(2016), https://www.meti.go.jp/meti_lib/report/2016fy/000459.pdf
- 8)IPA:iコンピテンシディクショナリについて, https://www.ipa.go.jp/jinzai/hrd/i_competency_dictionary/
- 9)文部科学省:文部科学省教育課程部会 教育課程企画特別部会(第4回),配付資料2, p.22 (2015).
- 10)Research project PEGASUS, https://www.pegasusprojekt.de/en/home
脚注
- ☆1 Electric Vihicleの略.
- ☆2 Connected,Autonomous,Shared&Services,Electricの略.
- ☆3 正式には「自動走行ソフトウェアスキル標準」とすべきだが,本稿では略称である「自動走行スキル標準」とする.
- ☆4 製品・サービス等を実現するために組織や個人に求められる仕事(業務)の構成要素のことである.
- ☆5 JASPAR版ETSSガイド,主にスキル基準を定義している.
- ☆6 組込みシステムにおけるモデルベース開発技術者のスキル標準であるJMAAB-ETSS([5])等もある.
- ☆7 Original Equipment Manufacturer,ISO16949において自動車製造者と規定されている.
- ☆8 ただし,たとえばディープラーニングを活用する場合,必要となる新しいニューラルネットワーク開発のようなスキルは基本的にAI企業に任せ,ディープラーニングを活用できることを重要視する等,自動車産業がすべてのスキルを取り込むわけではないことには留意が必要である.
- ☆9 開発・管理技術とタイトル付けすることも考えられる.
- ☆10 従来の管理技術についてはETSSを参照している.
- ☆11 iCDでは,IT分野を対象としているが,企業においてビジネスに求められるタスク(業務)と,それを支えるIT人材のスキル(能力や素養)を「タスクディクショナリ」,「スキルディクショナリ」として体系化している.
博士(情報科学).サイバーセキュリティ,ソフトウェア工学,AI/数理データ解析,リスク評価等に関する研究開発,日米欧アジアにおけるICT およびサイバーセキュリティ政策,技術戦略に関する調査に従事.東京大学大学院理学系研究科情報科学専攻修士課程修了.現在,(株)三菱総合研究所サイバーセキュリティ戦略グループ.
藤瀬 哲朗(正会員)(株)三菱総合研究所原子力安全事業本部 兼 科学・安全事業本部.電気通信大学大学院修士課程修了後,三菱総合研究所入社,現在に至る.(財)新世代コンピュータ技術開発機構研究所主席研究員,慶應義塾大学SFC研究所訪問所員,(独)情報処理推進機構ソフトウェア・エンジニアリング・センタ主査,慶應義塾大学SDM研究所研究員).高性能計算にかかわる研究,ソフトウェア工学および高信頼性システムの調査研究,研究開発事業マネジメント業務に従事.
有馬 仁志(非会員)ttt@gmail.com有馬マネジメントデザイン(株) 代表取締役.横浜スマートコミュニティ 代表.(一社) 電気自動車普及協会 理事.(一社) システムズエンジニアリング研究会 理事.(一社) スキルマネージメント協会 副幹事長.長崎総合科学大学大学院新技術創成研究所客員教授.九州工業大学情報工学部客員教授.東京大学大学院情報理工学系研究科非常勤講師.1959年長崎県出身.東海大学専門職大学院卒業.1982年より国内機器メーカーで産業用ロボット開発開発やTRONの開発を担当.1993年よりウィンドリバー社,Integrated Systems社,米国SDS社など外資系企業日本法人の上級管理職.2000年MontaVista Software Japan社を設立,代表取締役社長就任.2006年dSPACE Japan(株)の代表取締役社長に就任.2015年有馬マネジメントデザイン(株)代表取締役社長に就任.
高田 広章(正会員)名古屋大学未来社会創造機構教授.同大学大学院情報科学研究科教授・附属組込みシステム研究センター長を兼務.1988年東京大学大学院理学系研究科情報科学専攻修士課程修了.同専攻助手,豊橋技術科学大学情報工学系助教授等を経て,2003年より名古屋大学大学院情報科学研究科情報システム学専攻教授.2014年より現職.リアルタイムOS,リアルタイムスケジューリング理論,組込みシステム開発技術等の研究に従事.オープンソースのリアルタイムOS等を開発するTOPPERSプロジェクトを主宰.博士(理学).本会,日本ソフトウェア科学会各フェロー.IEEE,ACM,電子情報通信学会,自動車技術会各会員.
編集担当:荒木 拓也(日本電気(株))