水産業支援のための漁獲位置記録システム
1.はじめに
現在,日本の水産業は漁獲量の減少傾向が続いている.水産庁が公表する平成27年度水産白書[1]によると,船舶技術や漁撈技術の発展により漁業生産量は1980年代にかけて増加傾向であり,1984年には1,282万トンの漁獲量を記録していた.しかし,排他的経済水域の導入による漁場の縮小や,オイルショックに起因する操業コストの増加にともない漁業生産量は減少を続け,2014年には479万トンにまで減少している.そのため,水産白書では,日本沿岸で水産資源を適切に管理し,持続可能な水産業を実現することの重要性が述べられている.
漁獲量減少の一因として,地球温暖化に起因した海水温の上昇も挙げられている.気候変動に関する政府間パネル(IPCC)の第5次報告書[2]によれば,1880〜2012年の間に平均大気気温は0.85℃上昇している.また,同報告書では,水深700mまでの海洋上部の水温は,1971〜2010年の間に上昇したことはほぼ確実であるとされている.同様に,気象庁は日本近海における海域平均海面水温の上昇率は+1.07℃/100年であるとのデータを公表している[3].海水温の上昇は,水産資源の分布や資源量の変動を引き起こすと考えられている.たとえば,これまでイカが主要な魚種であった北海道道南地方の函館市では,ここ数年イカの不漁が続いており,一方でブリの漁獲量の増加が目立っている.同様に,道東地方の羅臼町では,これまで漁獲量が少なかったイカの豊漁が続いている.
海洋環境と水産資源状況が変化する中で,海洋環境の観測のみではなく操業実態を把握し,より高精度な水産資源管理を実現することが必要である.水産資源管理の一例として,漁獲分布図の作成が挙げられる.漁獲分布図とは,海域を複数の領域(グリッド)に分割し,グリッドごとの漁獲量を可視化した図である.漁獲分布図を一定期間ごとに作成すれば,海域の使用状況の時間的・空間的な変化を把握できるとともに,漁業者が操業場所を決定する際の判断材料ともなる.漁獲分布図は,漁船の位置情報から漁場を抽出し,各グリッドの操業時間に応じて日ごとの漁獲量を割り当てることで作成する.しかし,この手法では,漁船の位置情報のみを用いており,実際に漁獲がなかった海域も漁場として抽出される.そのため,漁場の面積を過大評価してしまう問題がある.さらに,滞在時間の短い海域に対しても漁獲量を割り当てるため,数グラム程度のタコの重量としては不適切な漁獲量が割り当てられる問題もある.
我々は,前述の問題を解決するため,また操業の実態を把握するために漁獲位置記録システムを開発した.マリンネット北海道で提供されているミズダコに関するデータ[4]では,2014年のミズダコの漁獲金額は約74億円と全魚種の中でも上位の漁獲金額であり重要な魚種である.そのため,今回ミズダコを漁獲する樽流し漁を対象とした.本稿では,開発したシステムの構成と,実際にシステムを運用したプラクティスについて述べる.
2.樽流し漁の概要
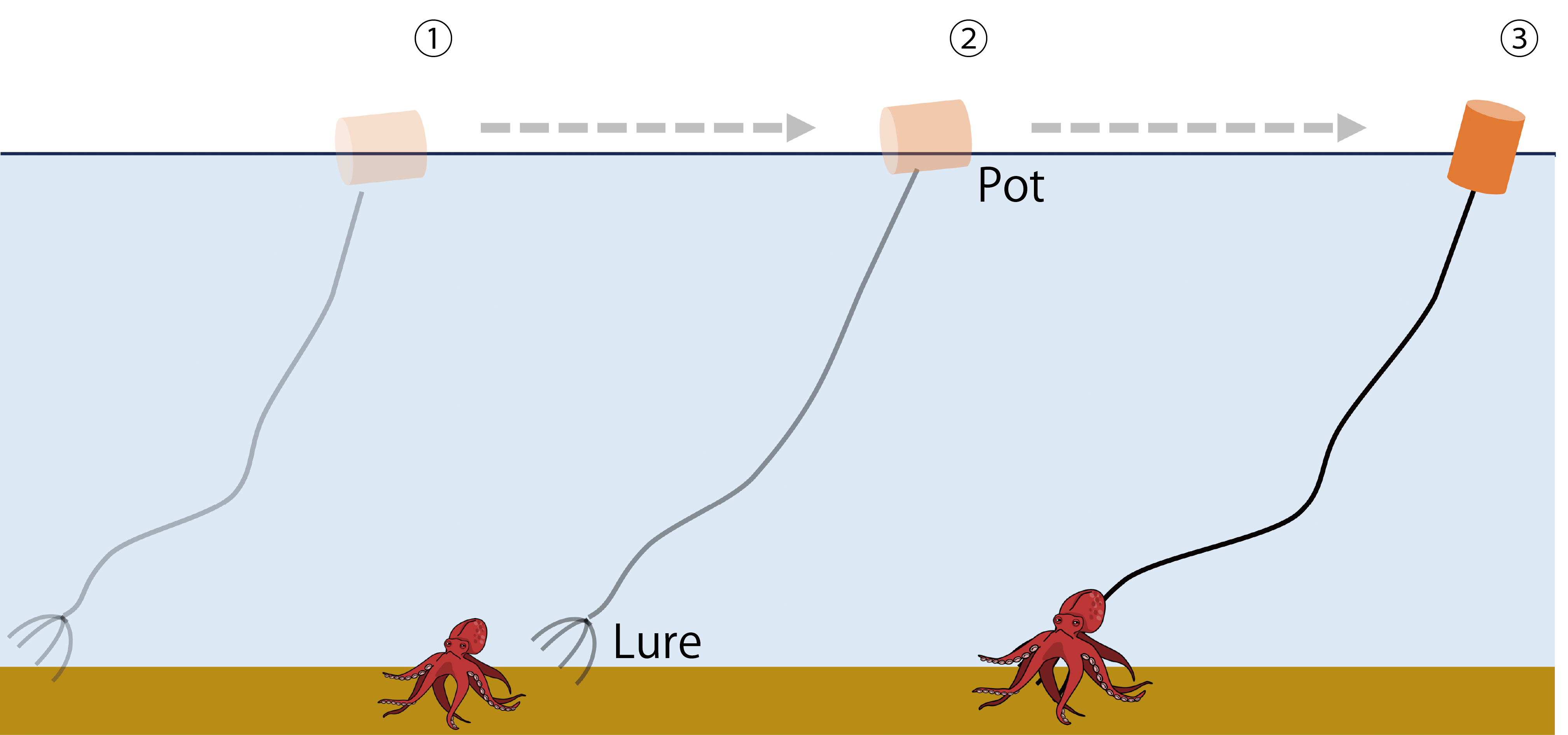
本章では,今回対象とした樽流し漁について説明する.図1に,樽流し漁の概要を示す.文献[5]によると,樽流し漁には針とポリエチレン製の樽が用いられ,針と樽は糸で結ばれている.漁場に到着後,漁業者は潮流の方向を確認し,潮上より樽と針を順次海へ投入する.潮流や風の影響によって樽が漂流することによって,樽と糸で結ばれている針は海底を引きずるように移動する.このとき,タコがかかると樽の動きが止まる,もしくは他の樽と比べて動きが変化することから,漁業者は目視で樽の動きを確認し,タコがかかった針と樽を引き揚げる.針からタコを外した後,再度海に投入することを繰り返す.実際の操業では,樽と針のセットは複数(15個前後)用いられており,漁業者が1人で実施している場合が多い.
3.関連研究
これまで,ICTを活用して水産業支援を目指した研究が多数行われている.特に多いのは,IoTやセンサネットワークなどの技術を活用した環境モニタリングシステムに関する研究である.水温や塩分濃度,溶存酸素など海洋生物に影響を与える海洋環境の取得を目的とした海洋観測ブイが多数開発されている[6],[7],[8],[9].文献[6],[7]ではセンサによる観測値をZigbeeを用いて送信する観測ブイシステムが開発されている.文献[8]では,複数ブイ間でセンサネットワークを構築しており,GPRS(General Packet Radio Service; GSM方式の携帯電話回線網を活用したデータ伝送技術)モジュールを搭載するマスタに相当するブイが,他のブイからのデータや自ブイのデータを送信するシステムを開発している.筆者らは,同一地点で異なる複数の水深の水温を計測するための,3G通信モジュール搭載型多層観測ブイを開発している[9].J. M. Del Rosarioらは,フィリピンのPalakpakin湖で,養殖業のための無線センサネットワークの研究を行っている[10].この研究では,湖岸設置用の固定フィールドサーバと,湖中央部の観測を行うための移動フィールドサーバを用いて,水温,溶存酸素,映像などの情報を取得している.岸野らは,絶滅危惧種に指定されているニッポンバラタナゴの生息環境の調査を目的として,環境情報を取得するためのセンサネットワークを構築した.さらに,センサネットワークで取得した情報を解析し,照度がニッポンバラタナゴの産卵に影響を与えていることを明らかにした[11].
環境情報のみではなく,漁船の位置情報の取得・活用に関する研究も行われている.J. Leeらは,VMS(Vessel Monitoring System)のデータを解析することで,漁撈努力分布(海域ごとの操業時間の分布)を推定する研究を行っている[12].この研究では,漁船が低速で航行しているときを操業中と定義し,漁法ごとの漁撈努力分布の推定に取り組んでいる.P. Breenらは,VMSによる漁撈努力分布の推定を補助するために,漁船の目撃情報を活用した手法を提案している[13].K. Rakeshらは,操業中の漁業者の安全を確保する目的で,漁船の位置情報を可視化するための研究を行っている[14].筆者らも船舶が多く非常に混雑した海域である大阪湾を対象として,漁船の安全操業を支援するために,漁船の位置情報を取得・提供するシステムを実現した[15].また,マナマコ漁を対象として,漁船の位置情報を取得するシステムと漁獲量を記録するためのiPadアプリケーションを開発し,水産資源管理を実現した[16].本研究で対象とする樽流し漁についても,過去に研究が行われている.漁船の位置情報から漁具の漂流速度を推定し,操業に適した流速の条件を明らかにした研究[17]や,水産資源管理を目的として,漁船の位置情報を利用して漁場を抽出し,漁獲量を割り当てることで漁獲分布図の作成を行う研究などが行われている[18].
文献[12],[16],[18]の手法では,漁船の位置情報から漁場を抽出している.通常,場所によって漁獲量の差異があるはずであるが,場所ごとの漁獲量の情報は取得できていないため,漁船の位置情報から求めた漁場に対して漁獲量を割り当てざるを得ない.そのため,実際漁獲がない海域も漁場として抽出し,漁場面積を過大評価してしまう問題がある.本研究は主にこの問題を解決することを目的としており,漁船の位置情報の取得・活用に関する研究に分類される.
4.漁獲位置記録システム
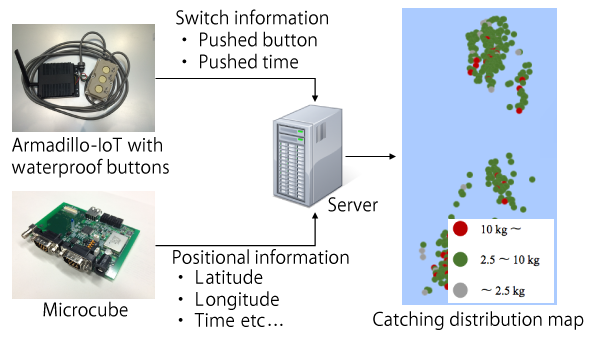
図2にシステムの概要を示す.このシステムでは,漁船の位置情報と漁獲時刻から,ミズダコの漁獲された位置を明らかにし,漁業者の操業実態の把握を行う.
4.1 ハードウェア構成
漁船の位置情報の取得には,筆者らが開発したマイクロキューブ[16]を利用した.これは,漁船に搭載されているGPSプロッタ(船上で自船舶の位置を視覚的に確認できる装置)から,GPSが出力するGPRMCセンテンスを取得し,3G回線経由でサーバまで送信するための装置である.これにより,10秒ごとの緯度,経度,速度,針路の情報を取得することができる.
漁獲時刻の記録には,Armadillo-IoT(型番:AG421-D00Z)[19]と防水押ボタンを用いた.Armadillo-IoTは3G回線でインターネットに接続できるため,NTP(Network Time Protocol)により時刻を取得している.本システムに用いた防水押ボタンを図3に示す.漁獲時刻を記録するために,文献[16]の手法を拡張してタブレット端末もしくはスマートフォンを用いて,正確なミズタコの漁獲位置や漁獲量を記録する手法も考えられる.しかし,樽流し漁は複数の樽を扱うため漁業者にはタブレット端末などを操作する時間的な余裕がない,漁業者全員が情報通信端末の利用に慣れているわけではない,漁業者は操業中濡れた手で作業を行うなどの理由から,容易に操作可能で防水性が担保された装置を用いることが望ましい.そこで今回,我々はイカ釣り漁で用いられるイカ釣りロボットの防水押ボタンを用いた.このボタンは本来屋外での利用が想定されているため,十分な防水性や対候性を有している.予備実験の結果,このボタンはIPX7相当の防水性能を有していることを確認した.また,情報の入力方法も単にボタンを押下するのみなので,誰でも簡単に扱うことができる.
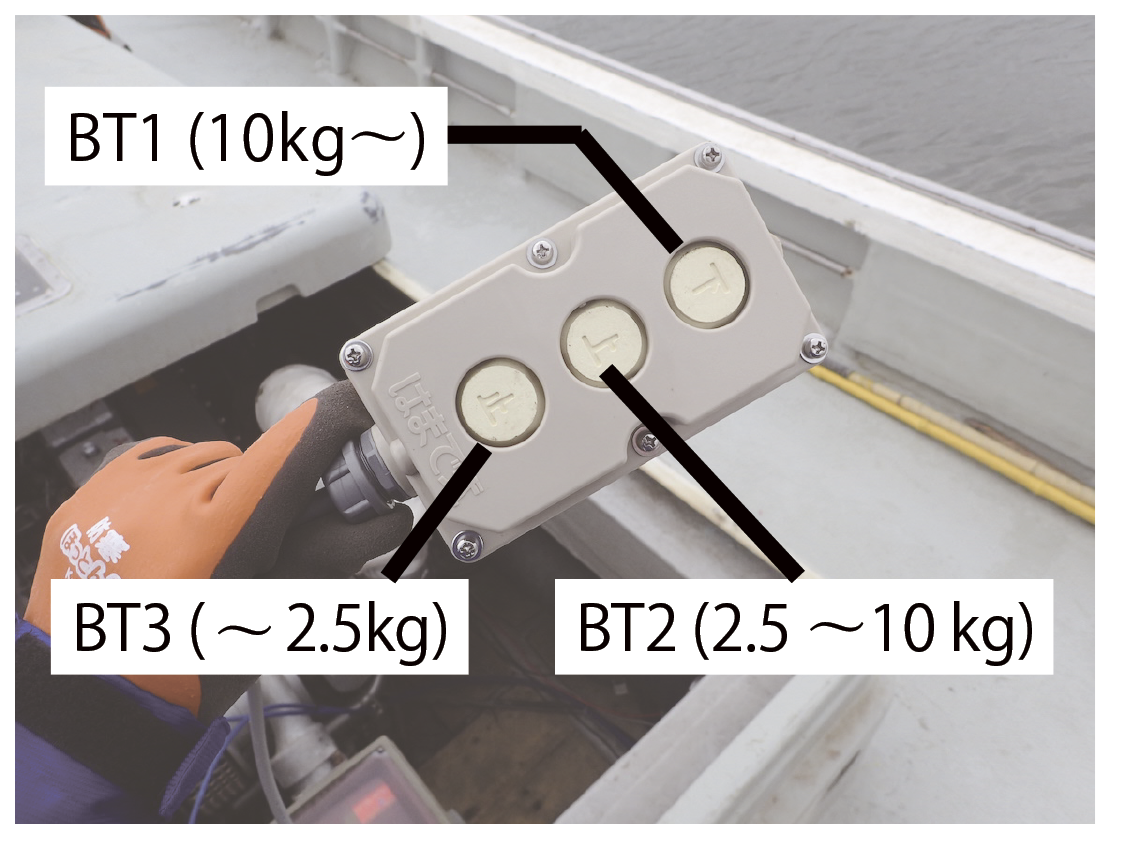
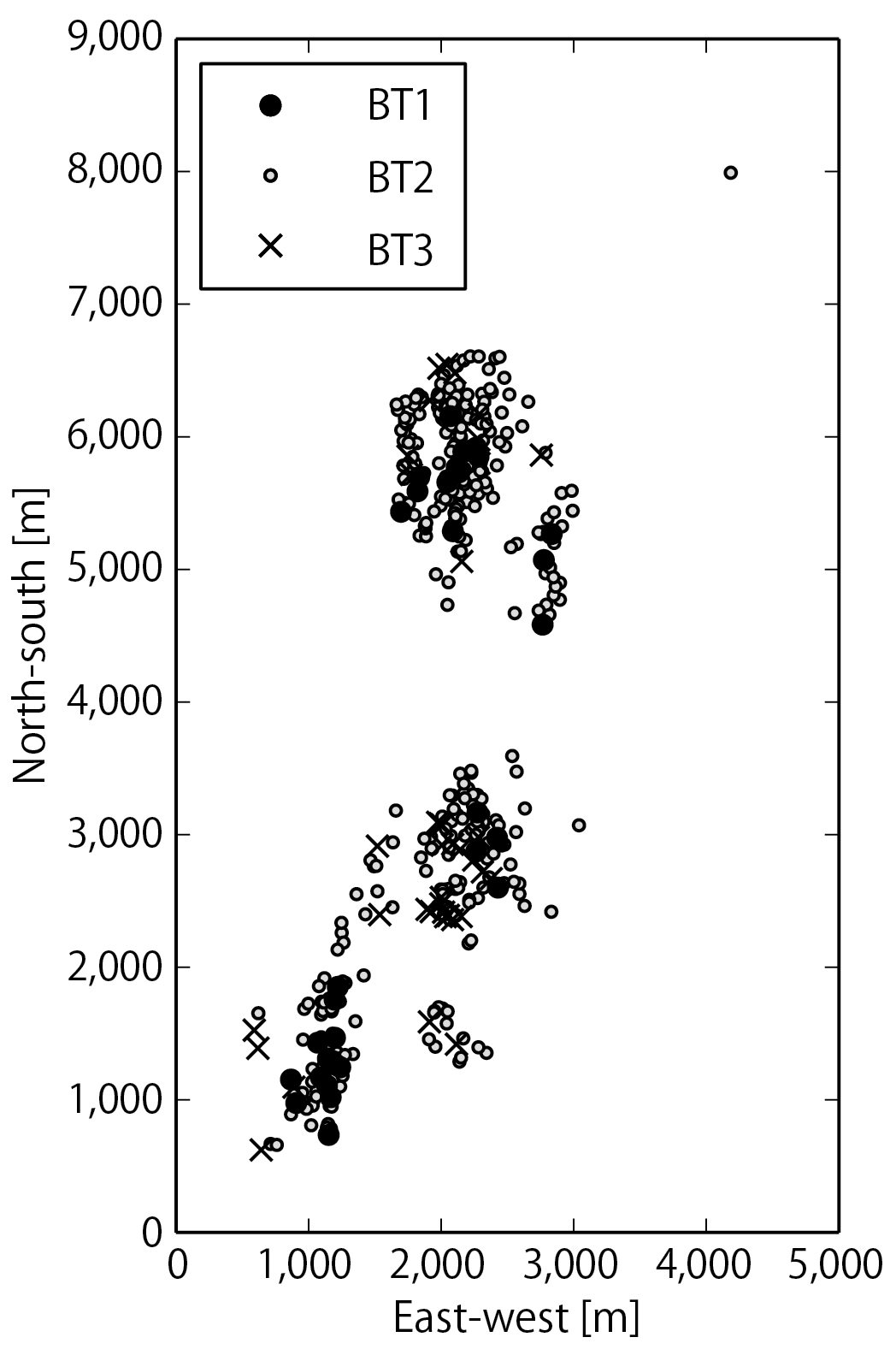
提案システムでは,漁獲時刻と合わせて漁獲したミズダコの重量区分も取得する.今回用いた防水押ボタンには計3つのボタンがあり,漁業者へのヒアリングをもとに,各ボタンとタコの重量を対応づけた.対応づけは,上のボタンから順に「10kg以上」,「2.5〜10kg」,「2.5kg未満(資源保護の観点から,漁協で出荷禁止とされている重量)」とした(以降,本稿ではそれぞれのボタンをBT1,BT2,BT3とする).漁業者は,タコを引き揚げた際に,タコの重量に対応したボタンを押下する.
情報を集約するサーバは,さくらインターネット(株)の「さくらのVPS(メモリ1GB,CPU仮想2core,HDD100G)」を利用して構築した.サーバでは,マイクロキューブとArmadillo-IoTから送信された情報の蓄積・解析を行う.
なお,今回は漁船の位置情報を取得するためのマイクロキューブと,Armadillo-IoTを用いた防水押ボタンはそれぞれ異なる3G回線を用いている.これは,漁船位置と漁獲位置を同時に送信する装置を新たに開発するにはコストがかかることと,すでに漁船には別の取り組みでマイクロキューブが搭載されていたため,それに拡張する形で漁獲時刻を記録するArmadillo-IoTと防水押ボタンを搭載したためである.技術的には両者を統合することに問題はない.
4.2 ソフトウェア構成
Armadillo-IoTでは,以下の3つのスレッドが動作している.
(1)ボタン押下情報取得スレッド
押下されたボタンの種別,ボタン押下時刻をボタン押下情報として取得し,送信待ちキューに挿入する.
(2)ボタン押下情報送信スレッド
キューに保存されているボタン押下情報を取り出し,3G回線経由でサーバに送信する.送信時にはサーバからのACKによって情報がサーバまで到達しているかどうかを確認する.サーバに情報が到達していない場合は再送を行う.なお,送信はTCPを用いている.ペイロードのサイズは29バイトであり,携帯電話番号,タイムスタンプ,押下したボタンの種別に関する情報が含まれる.
(3)生存確認情報送信スレッド
サーバでArmadillo-IoTの稼働状況を確認するために,サーバに対して5分間隔で生存確認メッセージを送信する.ボタン押下情報送信スレッドと同じくTCPを用いており,ペイロードのサイズは30バイトである.ペイロードには携帯電話番号,タイムスタンプ,生存確認メッセージであることを示す識別子が含まれる.
サーバでは,マイクロキューブによる位置情報と,Armadillo-IoTから送信されたボタンの押下情報から,ミズダコの漁獲位置を計算する.マイクロキューブにより得られた時刻t1の座標を点P1(x1,y1),時刻t2の座標を点P2(x2,y2),ボタンの押下時刻をt(t1<t<t2)とする.t1からt2の間は船速が一定であると仮定し,点P1とP2を結ぶ線分をt-t1:t2-tで内分する点をミズタコの漁獲位置とする.
5.システム評価
今回,北海道留萌市で樽流し漁を行う漁業者2名(2隻)を対象として,開発した漁獲位置記録システムの運用実験を行った.システムの運用期間は,2016年6月8日から7月27日までである.本章では,Armadillo-IoTからデータを送信する際の通信性能の評価,ボタンの押下場所を可視化した結果,提案システムと従来手法により作成した漁獲分布図の比較を行った結果について述べる.なお,システム導入の際には著者も実際に操業に同行し,スイッチの押下状況や操業の様子を観察した.
5.1 通信性能評価
開発したシステムが,海上でも問題なく動作すること,また目的とする水産資源管理に利用できることを確認するため,生存確認メッセージの受信率および遅延時間について評価した.
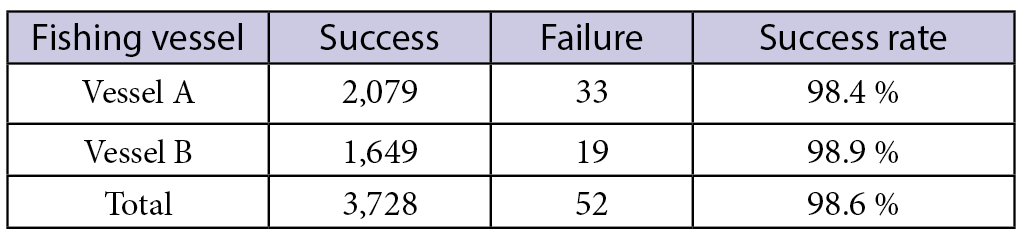
表1に2隻の漁船ごとの生存確認メッセージ受信率と,2隻合計の生存確認メッセージ受信率を求めた結果を示す.表1から,98%以上の高い受信率を達成していることが分かる.北海道留萌市では,樽流し漁はおおむね海岸線から5km以内の範囲で行われているため,携帯電話のサービスエリア内であることから,高い受信率を達成していると考えられる.さらに,ボタンの押下情報についてはアプリケーションレベルで再送処理を行っているため,より確実にボタン押下情報をサーバに送信することができると考えられる.
また,遅延時間に関する評価も実施した.遅延時間は,生存確認メッセージ(前述の生存確認情報送信スレッドが送信したメッセージ)がサーバに届くまでの時間と定義し,サーバでの生存確認メッセージ受信時刻から,生存確認メッセージに含まれる送信時刻を引くことによって求めた.評価の結果,生存確認メッセージが5秒以内にサーバへ到達した割合は94.9%であった.同様に,生存確認メッセージ送信後27秒以内に,99%以上のメッセージがサーバへ到達していることを確認した.本システムでは遅延時間に対する要求は厳しくないため,水産資源管理において十分実用的な遅延時間であったと考えられる.また,準リアルタイムに漁獲に関する情報を取得できるため,流通・加工業者にもリアルタイムに漁獲に関する情報を配信することができれば,水産業におけるサプライ・チェーン・マネジメントを実現できる可能性がある.たとえば,流通業者ではトラック,発泡スチロールや木箱等の漁獲した水産物を保存するための箱,氷の量の最適化が期待される.また,加工業者では,作業にあたる人員数の見積もりや,加工に使用する原材料の量の最適化が期待される.
5.2 ボタン押下場所の可視化
図4に,漁業者の操業実態を明らかにするために,提案したシステムによってボタン押下場所を可視化した結果を示す.この図では,ボタンごとにマーカの形状を変更している.図4から,おおよそ(1,500, 4,500)〜(3,000,6,500)の範囲と,(500, 500)〜(3,000,3,500)の範囲の2カ所でボタンの押下が集中していること,つまり,漁業者は期間中,特定の範囲で集中して操業を行っていたことが推測される.また,10kg以上の大型のタコに対応するBT1は,主に(1,000,1,000)付近と(2,000,5,500)付近で集中的に押下されていることが分かる.表2に,期間中のボタンごとの押下数と,3つのボタンの総押下数を示す.ミズダコの漁獲数の8割以上が2.5〜10kgの重量であることが分かる.
5.3 漁獲分布図の作成
提案手法の有効性を確認するために,従来手法で作成した漁獲分布図と,提案システムで作成した漁獲分布図の比較を行った.今回,漁協から漁獲量のデータが入手できた2016年6月8日から7月8日までの期間で漁獲分布図を作成した.開発したシステムでは,漁業者の負担を考慮して3つのボタンのみを押下する方式のため,ボタンの押下情報からタコの正確な重量を把握することはできない.そのため,ボタン押下時の重量の期待値を漁協から入手したデータをもとに算出し,漁獲分布図を作成した.
ボタン押下時の重量の期待値の算出方法は次の通りである.まず,表2から,両船ともに10kg以上のミズダコの漁獲数は,2.5〜10kgのミズダコの漁獲数に対して少ないため,BT1が押下されたときのミズダコの重量を10kgとした.次に,漁船ごとにBT2が押下されたときのタコの重量の期待値を求めた.期待値は,実験期間全体の漁獲量からBT1の押下回数分の漁獲量を差し引いた上で,BT2の押下回数で除することによって求めた.数式では以下の式で表される.ここで,E(CBT1)とE(CBT2)はボタンBT1とBT2押下時の重量の期待値,Callは総漁獲量,NBT1とNBT2はそれぞれボタンBT1とBT2の押下回数である.


従来手法での漁獲分布図の作成手順は,文献[12]を参考とした.具体的には漁港の範囲外かつ船速が4ノット以下の場合を操業中であると定義した.まず海域を正方形のグリッドに分割し,漁船が各グリッドに滞在した時間を求める.各グリッドでの漁獲量は各グリッドでの滞在時間に比例すると仮定し,漁獲量をグリッドの滞在時間に応じて割り当てることによって漁獲分布図を作成した.
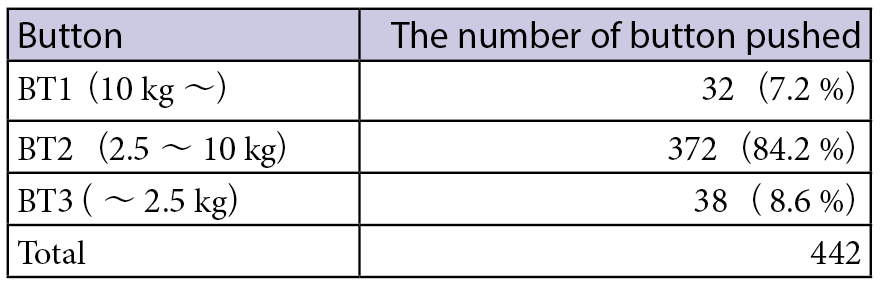
提案システムを利用して漁獲分布図を作成した結果を図5,従来手法に基づき作成した漁獲分布図を図6に示す.これらの図では,海域を100m四方のグリッドに分割し,今回の実験対象の漁船がタコを漁獲したグリッド(漁獲グリッド)を,漁獲量に応じて10kgごとに色分けした結果である.図5と図6を比較すると,提案手法では従来手法に比べて漁獲グリッドが少ないことが分かる.漁獲グリッド数を比較したところ,図5は214グリッドであるのに対して,図6は640グリッドであった.グリッドサイズが100mの場合,提案手法による漁獲グリッド数は,従来手法に比べて約67%削減されている.表3に,操業グリッド数(漁船の過去の航跡データから,樽流し漁の漁場になり得るグリッド)をNF,提案手法による漁獲グリッド数をCprop,従来手法による漁獲グリッド数をCconv,提案手法と従来手法による漁獲グリッド数の比率Cprop/Cconvをグリッドサイズごとにまとめた結果を示す.今回の実験では,Cprop/Cconvは17.3〜66.7%となり.いずれのグリッドサイズにおいても,提案方式による漁獲グリッド数は,従来方式による漁獲グリッド数を下回っていることが分かる.従来手法では,漁船の速度を用いているためミズダコの漁獲がない海域も漁場として抽出しており,漁獲グリッド数が過剰となる.一方,提案システムでは,ボタン押下によって漁場とミズダコの漁獲位置を正確に取得し漁獲グリッド数をより正確に把握することができたため,表3の結果になったと考えられる.
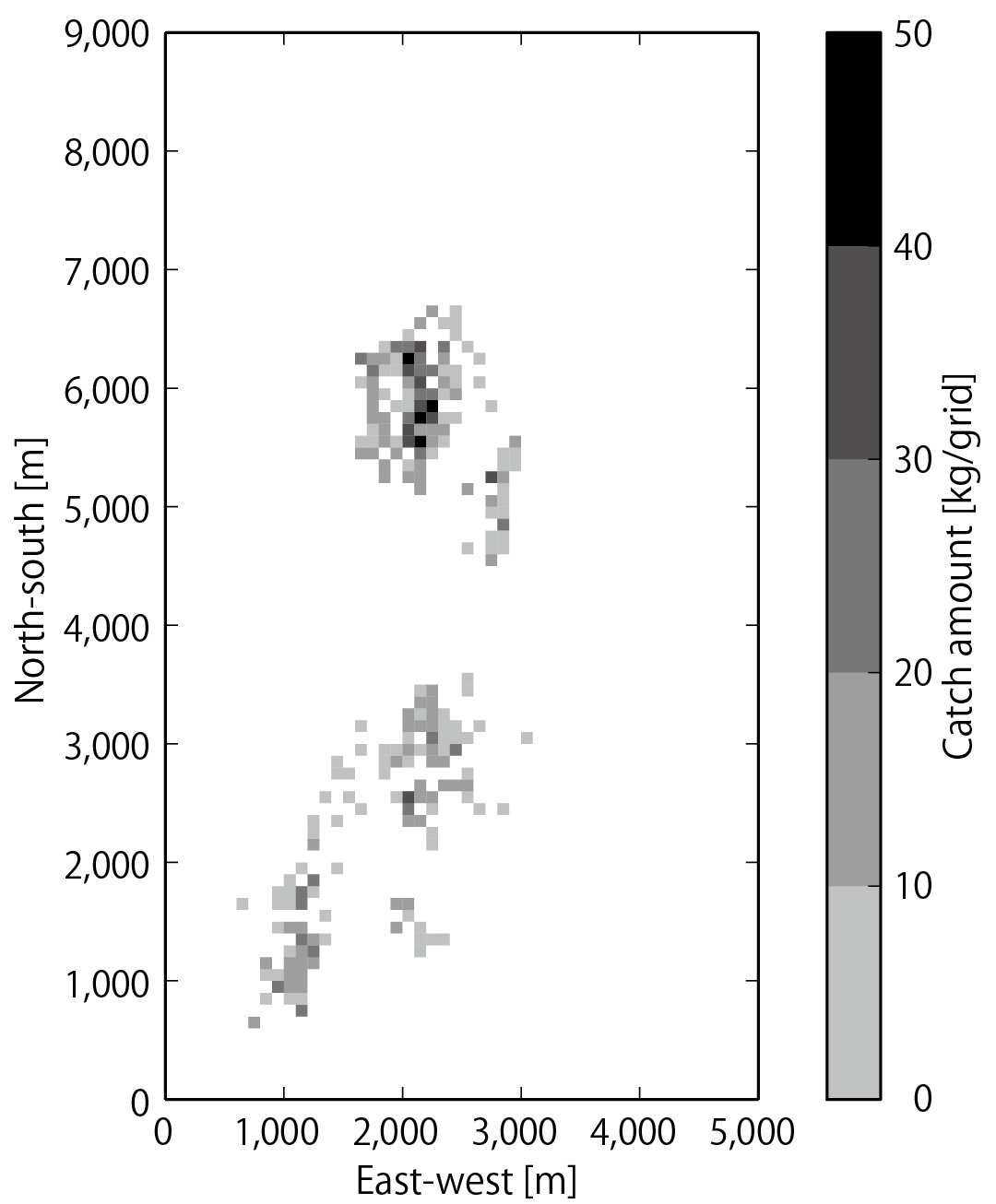
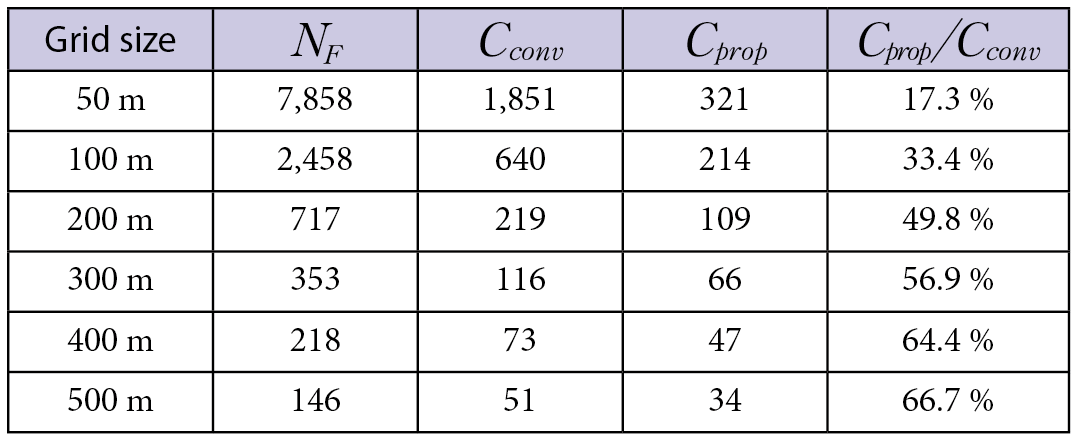
表4に,図5,図6で10kg未満の漁獲量が割り当てられたグリッドに関する統計的指標を示す.表4から,提案手法では2.5kg未満の漁獲量が割り当てられたグリッドは存在しないが,従来手法では597個中401個のグリッドに対して2.5kg未満の漁獲量が割り当てられている.また,グリッドに割り当てられた最少漁獲量および平均漁獲量に着目すると,提案手法は2.5kg以上であるのに対して,従来手法では最少漁獲量は0.02kgとなり,平均漁獲量も2.5kg未満となっている.従来手法では,各グリッドごとに,漁船の位置情報をもとに滞在時間を求めており,滞在時間に応じて漁獲量の割り当てを行う.そのため,極端に滞在時間の短いグリッドにも漁獲量を割り当ててしまうために,本来は出荷不可な重量である2.5kg未満の漁獲量が割り当てられてしまうグリッドが発生する.
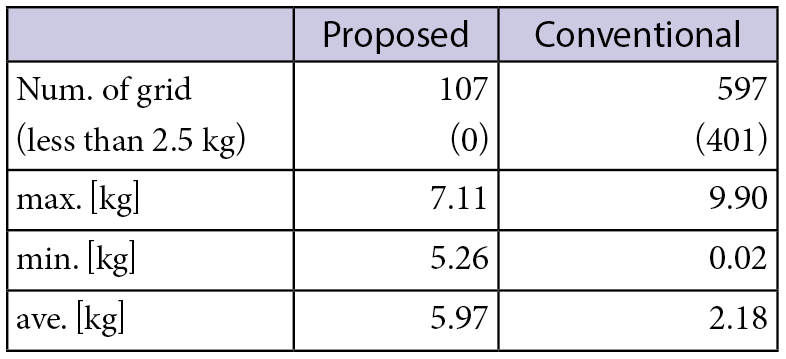
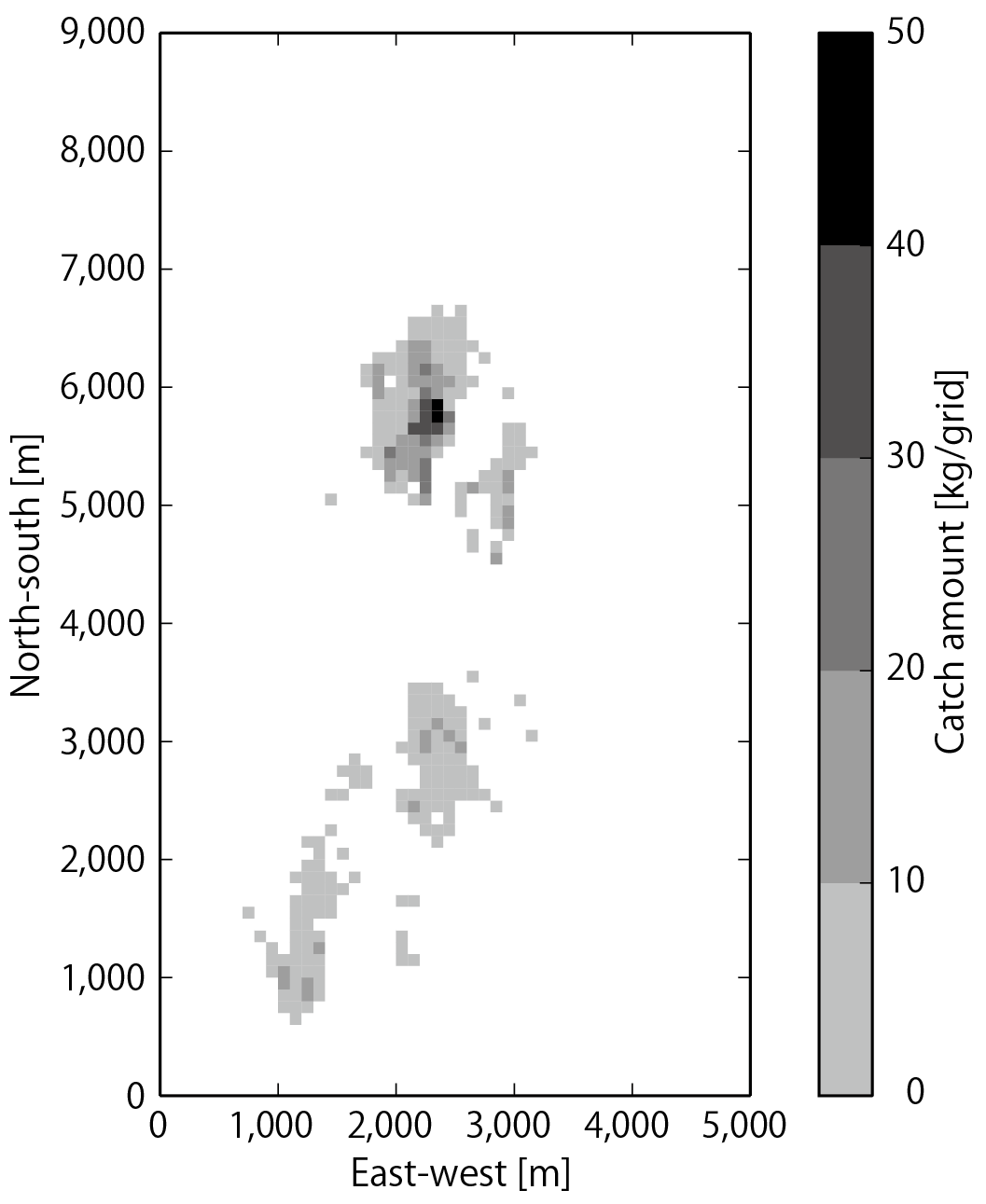
図7に,従来手法で作成した漁獲分布図から,2.5kg未満のグリッドを削除した結果を示す.図5と図7と比較した結果,また,すでに表4でも示しているとおり,2.5kg未満の漁獲量が割り当てられたグリッドを削除したとしても,漁場面積の過大評価の問題を解決できていないと考えられる.
以上のことから,提案システムによりミズダコの漁獲位置を取得できるようになったため,従来手法の問題点であった漁場面積の過大評価と,不適切な漁獲量が割り当てられる問題を解決し,より現実に即した漁獲分布図を得られたと考えられる.
5.4 ヒアリング
システムを利用した漁業者に対して,システムの利用感についてのヒアリングを実施した.その結果,システムによって漁獲位置を操業終了後に確認できるのは有用であるとのコメントをいただいた.また,操作方法についても,単にスイッチを押すだけなので,大きな負担はないとのことであった.
一方で,スイッチを正しく押下できたかどうかを確認する方法がないため,表示灯などで押下したスイッチを可視化してほしいとの要望があった.また,繁忙時(複数の樽にミズダコがかかっているとき)には漁業者はミズダコの引き上げ作業に忙しく,スイッチの押し忘れがあることなどが判明した.
6.まとめと今後の展望
本稿では,漁獲位置記録システムとその運用結果について報告した.開発したシステムでは,漁業者の利便性を第一に考え,ボタンを押下することによって情報を送信するシンプルな構成とした.システムの性能評価に関する実験では,Armadillo-IoTの生存確認メッセージの受信率,遅延時間ともに,本研究の目的である水産資源管理に対して十分な性能を有していることを示した.また,システムによって得られた情報から漁獲分布図を作成し,漁業者の操業実態の可視化や従来手法における漁獲分布図作成時の問題点を解決することができた.
今後の展望としては,より漁業者に負担をかけない形で情報を取得する方法を検討する必要がある.実際に漁業者にヒアリングを実施したところ,繁忙時(複数の樽にミズダコがかかっているとき)には少なからずスイッチの押し忘れがあることが判明した.樽の引き上げ作業は特徴的な動作のため,漁業者に加速度センサ等を装着させ,腕の動きからミズダコの漁獲を自動検出するシステムを開発すれば,より正確なデータを取得することが可能となる.
謝辞 本研究では,実験を新星マリン漁業協同組合所属の漁業者2名の協力により実施した.また,同漁業協同組合から漁獲量データの提供を受けた.関係者諸氏に深く感謝する.
参考文献
- 1)水産庁:平成27年度水産白書,水産庁,http://www.jfa.maff.go.jp/j/kikaku/wpaper/(2016年9月1日現在)
- 2)IPCC:Summary for Policymakers. In:Climate Change2013:The Physical Science Basis., IPCC(online), available from,http://www.climatechange2013.org/images/report/WG1AR5_SPM_FINAL.pdf(2016年9月1日現在)
- 3)気象庁:海面水温の長期変化傾向(日本近海),気象庁,http://www.data.jma.go.jp/gmd/kaiyou/data/shindan/a_1/japan_warm/japan_warm.html(2016年9月1日現在)
- 4)地方独立行政法人北海道立総合研究機構水産研究本部:マリンネット北海道データベース検索,地方独立行政法人北海道立総合研究機構水産研究本部,http://www.hro.or.jp/list/fisheries/marine/h3mfcd0000000ge0.html(2016年12月1日現在)
- 5)金田禎之:日本漁具・漁法図説,成山堂書店(2005).
- 6)Regan, F., Lawlor, A., Flynn, B. O., Torres, J., Martinez-Catala, R., O'Mathuna, C. and Wallace, J.:Ademonstration of Wireless Sensing for Long Term Monitoring of Water Quality, Proc. 2009 IEEE 34th Conferenceon Local Computer Networks, pp.819-825(2009).
- 7)Voigt, Osterlind, F., Finne, N., Tsiftes, N., He, Z., Eriksson, J., Dunkels, A., Bamstedt, U., Schiller, J. and Hjort, K.:Sensor Networking in Aquatic Environments - Expe-riences and New Challenges, Proc. 32nd IEEE Conference on Local Computer Networks, pp.793-798(2007).
- 8)Albaladejo, C., Soto, F., Torres, R., Snchez, P. and Lpez, J. A.:A Low-Cost Sensor Buoy System for Monitoring Shallow Marine Environments, Sensors, Vol.12, No.7, p.9613 (online), available from,http://www.mdpi.com/1424-8220/12/7/9613 (2012).
- 9)和田雅昭,畑中勝守,戸田真志:養殖漁業支援のためのユビキタスブイの開発,情報処理学会論文誌,Vol.49, No.6, pp.1833-1843,http://ci.nii.ac.jp/naid/120004145959/ (2008).
- 10)Rosario, J. M. D., Mateo, G. C., Villanueva, M. M. F., Chua, R., Favila, C., Libatique, N. J. C., Tangonan, G. L., Guico, M. L., Pineda, C., Rodil, C., Garabiles, D., Conti, N., Tadina, R., Iwata, H. and Kawtrakul, A.:Deployment of a Wireless Sensor Network for Aquacultureand Lake Resource Management, Proc. 2011 IEEE 7th International Conference on Wireless and Mobile Computing, Networking and Communications, pp.433-438(2011).
- 11)Kishino, Y., Yanagisawa, Y., Shirai, Y., Mizutani, S., Naya, F. and Kitagawa, T.:A Habitat-monitoring System for an Endangered Fish Using a Sensor Network, Proc. UbiComp/ISWC'15 Adjunct, New York, NY, USA, ACM, pp.133-136 (online), available from,http://doi.acm.org/10.1145/2800835.2800890 (2015).
- 12)Lee, J., South, A. B. and Jennings, S.:Developing Reliable, Repeatable, and Accessible Methods to Provide High-resolution Estimates of Fishing-effort Distributions from Vessel Monitoring System (VMS) Data, ICES Journal of Marine Science: Journal du Conseil, Vol.67, No.6, pp.1260-1271 (online), available from,http://icesjms.oxfordjournals.org/content/67/6/1260.abstract (2010).
- 13)Breen, P., Vanstaen, K. and Clark, R. W. E.:Mapping Inshore Fishing Activity Using Aerial, Land, and Vessel-based Sighting information, ICES Journal of Marine Science:Journal du Conseil, (online), available from,http://icesjms.oxfordjournals.org/content/early/2014/07/16/icesjms.fsu115.abstract (2014).
- 14)Rakesh, K. and Sunanda, S.:The Development of a Visualization Framework for Fishing Vessels at Sea, Proc. Fifth International Conference on Computing, Communications and Networking Technologies, pp.1-5 (2014).
- 15)高 博昭,和田雅昭,松本浩文,畑中勝守:大型船舶と小型船舶の位置情報重畳表示による航行支援の取り組み,日本航海学会論文集,Vol.128, pp.1-8,http://ci.nii.ac.jp/naid/130004622955/ (2013).
- 16)Wada, M., Sano, M., Hatanaka, K. and Taka, H.:Digital Diary System for Fishery and Applications of Fishery Management, Proc. 2012 Oceans, pp.1-6 (2012).
- 17)佐野 稔,坂東忠男,江淵直人,高柳志朗:宗谷海峡のミズダコ樽流し漁業における漁具の漂流速度と漁獲量の関係,水産海洋研究,Vol.76, No.3, pp.123-130,http://ci.nii.ac.jp/naid/10030934439/ (2012).
- 18)山崎礼華,和田雅昭,佐野 稔,高 博昭:航跡情報を活用した漁場抽出アルゴリズムについて─たこいさり樽流し漁の事例─,日本航海学会論文集,Vol.130, pp.62-68,http://ci.nii.ac.jp/naid/130004623018/ (2014).
- 19)(株)アットマークテクノ:Armadillo-IoT ゲートウェイ製品マニュアル,(株)アットマークテクノ,http://armadillo.atmark-techno.com/files/downloads/armadillo-iot/document/armadillo-iotg-std_product_manual_ja-2.8.0.pdf(2016年5月1日現在)
1984年生.2007年豊橋技術科学大学工学部情報工学課程卒業,2009年同大学院修士課程情報工学専攻修了.2012年同大学院博士後期課程電子・情報工学専攻修了.同年公立はこだて未来大学特任研究員,2015年同大助教.博士(工学).水産・海洋分野を対象としたセンサネットワークに関する研究等に従事.2012年度電子情報通信学会東海支部学生研究奨励賞.電子情報通信学会,日本航海学会各会員.
和田 雅昭(正会員)wada@fun.ac.jp1993年北海道大学水産学部漁業学科卒業.同年(株)東和電機製作所入社.2004年北海道大学大学院水産科学研究科環境生物資源科学専攻博士後期課程(社会人特別選抜)修了.2005年公立はこだて未来大学講師.2006年同大助教授のち准教授.2012年同大教授.マリンIT・ラボ所長.ICT漁業の研究に従事.2012年度北海道科学技術賞,2013年度喜安記念業績,2014年度北海道総合通信局長表彰,2016年度ドコモ・モバイル・サイエンス賞受賞.博士(水産科学).日本航海学会,電子情報通信学会,IEEE各会員.
採録決定:2017年9月6日
編集担当:竹内郁雄