
| 川口 一画 筑波大学システム情報系 助教 |
[背景]三項関係の場におけるロボットの活用
[問題]非言語的表現が適切に機能しないという課題
[貢献]社会学的知見に基づくロボットの動作設計指針
[問題]非言語的表現が適切に機能しないという課題
[貢献]社会学的知見に基づくロボットの動作設計指針
本研究では,三項関係(展示案内のような,2名以上の参加者が何らかの対象物を交えた会話を行う状況)の場で利用されるコミュニケーションロボットを適切にデザインするという目的に対して,人間同士のコミュニケーションにおける「行為の連鎖(sequence)という社会学的概念に注目した.「行為の連鎖」とは,話し手の発話と聞き手の応答との間に形成された発話間関係のことを指す.行為の連鎖は一貫性と規則性を持ち,会話の参加者は行為の連鎖を通して共通の認識や信念を確立することで(基盤化),お互いに協力しながら連鎖的に何らかの目的を遂行していく.このような行為の連鎖の知見に基づけば,コミュニケーションロボットが特定の目的を達成するためには,ロボットが提示する単独の行為だけに着目するのではなく,その前後の対話者の行為を含めた行為の連鎖に着目することが有効であると考えられる.そこで本研究では,コミュニケーションロボットの設計において,社会学的知見に基づき目的の達成に必要となる行為の連鎖を考慮する手法を提案した.これにより,コミュニケーションロボットにより提示された行為がどのようなプロセスで目的達成につながるかを把握することができる.本研究では,このような設計指針に基づく設計事例として,鑑賞支援ロボットとテレプレゼンスロボットを対象とした研究を実施した.
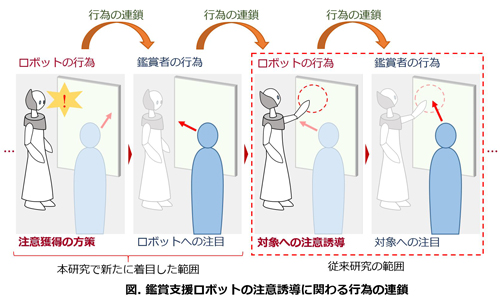
鑑賞支援ロボットに関する研究では,ロボットが指さしを行った場合に,それが無視され注意誘導が達成されないという課題に着目した.行為の連鎖の概念に着目すれば,これは指さしという行為の意図が相手に理解されるための前提となる行動への着目が得られなかったことによる.同様な状況は人間同士の会話においても発生し,そのような場合に人間は注意獲得のためのさまざまな方策(沈黙・言い直し,身体ねじり)を用いることが知られていたことから,それらの方策をロボットに実装しその効果の検証を行った.そしてそれらの方策がコミュニケーションロボットにおいても有効であり,注意獲得につながる行為の連鎖を誘起することを示した.
テレプレゼンスロボットに関する研究では,ディスプレイ回転型のテレプレゼンスロボットにおいて遠隔参加者の存在感や参与の向上が達成されないという課題に着目した.本研究ではこのような課題の原因として,ディスプレイの回転では人間の注視動作が本来持つ意図が対話者に適切に理解されていないと考え,それを確認するための実験を行うとともに,人間の注視と同様なアフォーダンスを実現するヒューマノイドロボットの頭部を付与する手法の提案を行った.そして提案手法により注視方向の伝達精度が向上し,目が合っている感覚や同じ場所にいる感覚等の印象が改善すること,さらに相互注視の達成という行為の連鎖が誘起されることを示した.
鑑賞支援ロボットに関する研究では,ロボットが指さしを行った場合に,それが無視され注意誘導が達成されないという課題に着目した.行為の連鎖の概念に着目すれば,これは指さしという行為の意図が相手に理解されるための前提となる行動への着目が得られなかったことによる.同様な状況は人間同士の会話においても発生し,そのような場合に人間は注意獲得のためのさまざまな方策(沈黙・言い直し,身体ねじり)を用いることが知られていたことから,それらの方策をロボットに実装しその効果の検証を行った.そしてそれらの方策がコミュニケーションロボットにおいても有効であり,注意獲得につながる行為の連鎖を誘起することを示した.
テレプレゼンスロボットに関する研究では,ディスプレイ回転型のテレプレゼンスロボットにおいて遠隔参加者の存在感や参与の向上が達成されないという課題に着目した.本研究ではこのような課題の原因として,ディスプレイの回転では人間の注視動作が本来持つ意図が対話者に適切に理解されていないと考え,それを確認するための実験を行うとともに,人間の注視と同様なアフォーダンスを実現するヒューマノイドロボットの頭部を付与する手法の提案を行った.そして提案手法により注視方向の伝達精度が向上し,目が合っている感覚や同じ場所にいる感覚等の印象が改善すること,さらに相互注視の達成という行為の連鎖が誘起されることを示した.
(2018年5月31日受付)