探索的環境センシング─実証実験に基づくモデル化と運用指針─
1.はじめに
センシング技術の進歩と安価なセンサやプログラマブルなIoT機器の出現によって,国や自治体,大企業による大規模な環境センシングが各所で進められている[1][2].一方,センシング機材を安価に入手,利用可能になることで,これまでコストや手間の観点から環境センシングに手を出すことができなかった中小企業や研究者なども,手軽に環境センシングを実施可能となりつつある.安価なセンシング機材で手軽に環境センシングを実施できるようになると,環境センシングのスタイルも変化する.従来型の環境センシングは,センサ等が高価なためセンシング中途でのセンサの変更等に大きなコストがかかり,あらかじめ収集する環境データの種類やセンシング設定(サンプリングレート等)を正確に決める必要があったのに対し,センサ等の機材が安価であれば,収集したデータを見ながら途中でセンサやその収集方法を変更することが可能となる.これは,ill-defined(不明瞭)な問題の解決[3]に環境センシングが利用可能になるということである.たとえば,ある生き物の未知の生態を明らかにしたいが,どのような環境要因がその生き物の行動に影響しているか分からない,といったような課題への利用である.このような場合に,まずは影響しそうな環境指標を決めてデータを収集確認することで,どのような生態を明らかにできそうかといった課題の明確化を進めることができる.そして,段階的に明確化した課題に基づいて,データ収集の方法を変更したり,ターゲットとする環境指標を変更したりできれば,さらに課題を追求していくことができると考える.
しかし,上記の例のように,課題やゴールが不明瞭な状態でスタートし,試行錯誤しながらそれを明らかにしていくような環境センシングは,実施に先立って最終的にかかるコストを見積もることが難しいという課題がある.収集する環境データの種類や規模が,環境センシングで蓄積されるデータの特性や精度を確認する過程において試行錯誤的に変更されていく可能性が高いためである.さらに問題となるのは,センサや設置場所の試行錯誤的な追加や変更によって漸次的に増大するコストもさることながら,変更したことによって発生する数々のトラブルである.試行錯誤の過程においてセンサや測定場所を変更すると,それによってセンシングを取り巻く状況が変化し,それ以前には起こらなかったトラブルが発生する.トラブルの内容は多岐にわたり解消にかかるコストも内容に依存するため,今後発生するかもしれないトラブル解消にかかるコストをあらかじめ見積もるのは困難である.したがって,ゴールが明確であるプロジェクトとは異なるアプローチが求められる.
本稿では,今後さまざまな企業や研究者が実施していくと考えられる試行錯誤的な環境センシング行為を,探索的環境センシングと定義する.次に,我々が実施している探索的環境センシングプロジェクトを紹介し,これらのプロジェクトで得られた知見を基に,探索的環境センシングのモデル化を行う.次に,モデルに基づき,探索的環境センシングにおける試行錯誤と,それに伴い発生するトラブルを整理する.我々が実際に経験したトラブルを紹介しトラブルへの対応指針を示す.最後に探索的環境センシングを効率的に進めるためのアジャイル環境センシング手法を提案する.環境センシングを一般化した上で,コスト発生部分の明確化とコストを抑えるためのトラブル対応指針,および効率的な実施手法を示し,探索的環境センシングの実施を促進することが本稿の狙いである.
2.探索的環境センシング
本稿において,探索的環境センシングとは,「センシングの結果得られたデータを基に,環境センサの種類,センシング設定(サンプリングレートや閾値等のパラメータ),設置場所等を適宜変更していきながら,不明瞭なゴールに向かって試行錯誤的にセンシングを進めていく」センシング行為である.対照的に,あらかじめ明確な目的やゴールが設定されており,そのゴールに向かって決められた環境データを収集するセンシングを確認的環境センシングと呼ぶこととする.それぞれの特徴を以下に示す.
探索的環境センシング- 知りたいことは環境データそのものではなく,環境データによって明らかにしたいゴールがある.
- 環境センシング前には漠然としたゴールしか存在せず,環境のどんな指標がゴールに向かって必要か分からない.
- ひとまず関係がありそうな環境データを取得し観察する.
- 環境データを観察して明らかになったことを基に,ゴールに対する理解を深め,収集するデータの変更や収集場所の変更を行い,再度収集,分析を進める.
- すでにゴールおよびゴールに向けて必要な環境指標が明確である.
- ゴールに向けて必要な環境指標に関するデータを収集する.
すなわち,探索的環境センシングは,ゴールが曖昧であり,それゆえ収集する環境データやその収集場所,設定等を試行錯誤する必要があるのに対して,確認的環境センシングは,ゴールおよび環境指標が明確に定まっておりその必要がない.
確認的環境センシングは,たとえば国が行っている大気汚染物質や放射線の測定が挙げられる.そらまめ君☆1では,さまざまな大気汚染物質の測定値を公開しているが,その目的は汚染物質の監視や注意報・警報の発令であり,目的に従って個々の汚染物質値を計測している.
探索的環境センシングは,不明瞭なゴールに向かって試行錯誤しながら徐々にゴールを明確化していくという点で,プロダクトデザインや建築デザイン,インタラクションデザインにおける初期過程と類似する.建築デザインの初期段階における試行錯誤的なデザイン過程では,アイディアをスケッチを用いて外在化し,外在化された表現を見ながら内省していく[4].探索的環境センシングにおいては,意味のありそうなデータを収集し,収集したデータを閲覧分析しながら内省を進め,ゴールを明確化していく.このような初期段階のデザイン過程においては,曖昧性を包含した外在化表現がカギとなる[3].曖昧さを表現することで,創造的思考を促すためのconstructive perception[5] を起こしやすくなるためである.探索的環境センシングにおいては,特定の視点でデータを分析して,曖昧なゴールの妥当性を検証することはもとより,データを多様な表現で可視化し,より明確なゴールの設定とそれに必要なデータの収集方法の可能性を気づかせることが重要と捉える.
3.探索的環境センシングプロジェクト事例
本章では,探索的環境センシングを実践した3つのプロジェクトを事例として紹介する.なおプロジェクトの詳細は,各引用文献を参照されたい.
3.1 公共車両による大気状況センシング
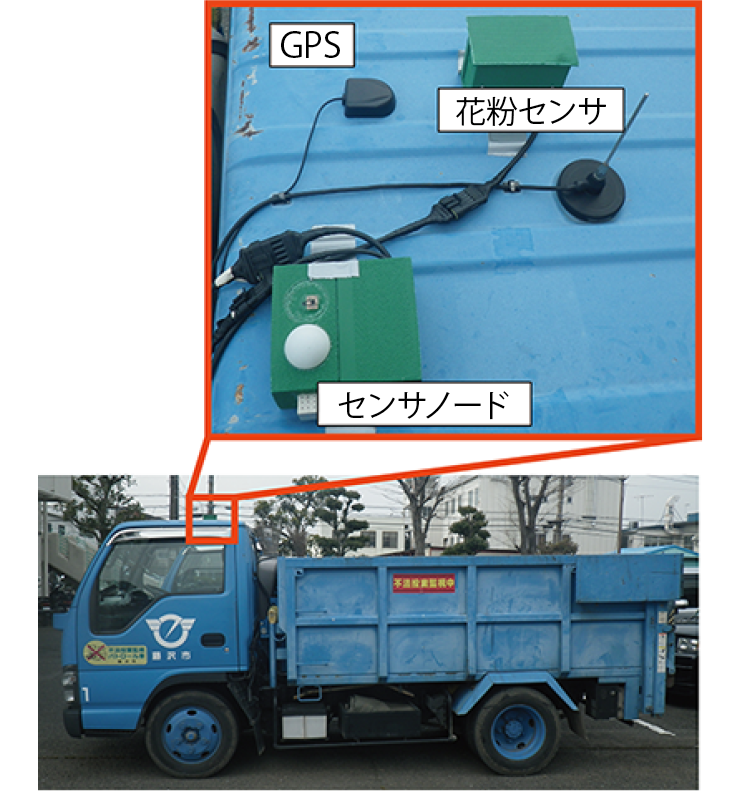
筆者らは,ClouTプロジェクト☆2において,ゴミ収集関連の公共車両を利用した大気状況センシング実験を,2014年3月から行っている[6][7].実験では,藤沢市のゴミ収集関連車両群の屋根の上に,センサノードに接続したPM2.5,花粉,CO,NO2等の大気観測センサ群,およびGPSや温度,湿度センサ等を設置し,センサノードを介して収集している.センサノードによって収集されたセンサデータは車内のゲートウェイを介して携帯電話網経由でNTT研究所内に設置したサーバに送信される.2016年5月現在で,計9台の車両が我々のセンサノードを搭載し,日々市内を循環しながら大気状況データを測定している.産業廃棄物収集車に設置したセンサノードを図1に示す.
本プロジェクトは,市内全域を巡回するゴミ収集車を利用することで藤沢市の大気の状況を詳細に収集し,市民生活に役立つサービスを明らかにすることを目標の一つとしてスタートしたが,立ち上げ時にサービス内容が具体化されていたわけではない.当初はまずCO,NO2,O3などを収集し,各大気汚染物質の時間的,地域的な特性の確認を行った.その結果,藤沢市の大気は全域に渡りこれらの汚染度合いは低いため,より市民が必要とする情報とは何かについて議論を行った.そして,現在までに,初期には設置していなかった,UV,PM2.5,騒音(マイク),加速度のセンサを追加し,あわせてシステム構成の変更を行っている[7].
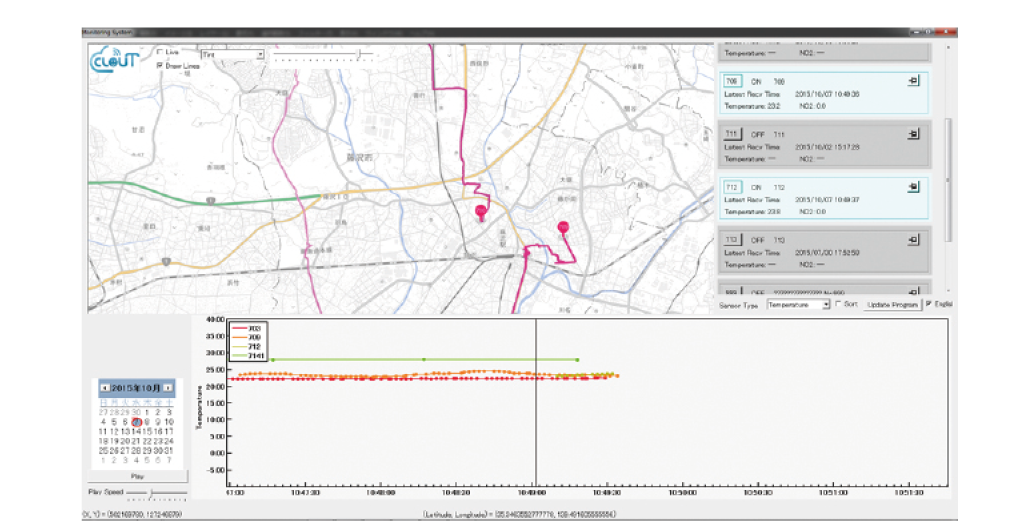
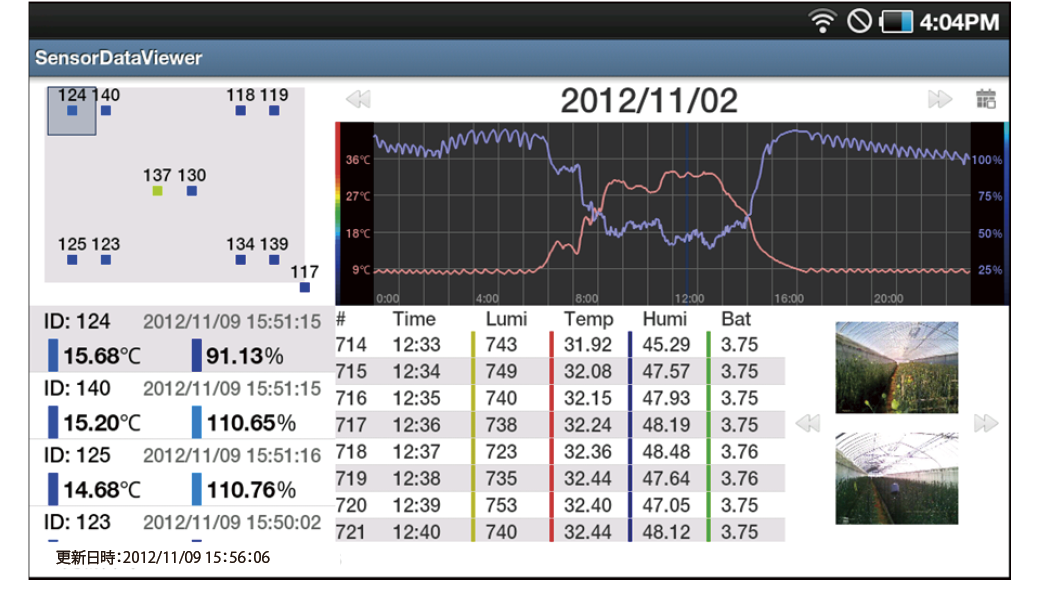
また,収集したデータを即時に確認するツール,および収集したデータを集約して可視化するツールを構築し,データ特性の分析に用いている.収集したデータを確認するツール(コントロールセンタ)のスクリーンショットを図2に示す☆3.コントロールセンタにより,センサを積んだ車両の軌跡や,センサノードの状態(電源のOn/Off,最終計測時間,最終計測データ),各計測データの変遷などを確認可能である.
3.2 希少魚生息池センシング
希少魚生息池センシングは,近畿大学農学部と共同で行っている環境センシングプロジェクトである[8][9].同大内にあるニッポンバラタナゴ(絶滅危惧IA類)が生息する池に,溶存酸素量,水温,温度,湿度,照度等のセンサを設置し,収集したセンサデータを携帯電話網を介してNTT研究所内のサーバに集約している.希少魚生息池に設置したセンサノードを図3に示す.2016年5月現在で,5カ所の測定点においてこれらのデータが日々測定されている.

本プロジェクトは,ニッポンバラタナゴの保護を目指し,産卵行動等の生態を明らかにすることを目的としてスタートした.開始当初は,産卵に影響しそうなセンシング指標として水温をターゲットにセンシングを行った.さらに,これまで人手で日に一度程度のみ計測機器を用いて測定していた溶存酸素量について,これを常時,高頻度に計測できるようにセンサを改良して設置した.常時連続的にデータを蓄積することにより,生息池の溶存酸素量が日中帯において想像以上に変動していることが分かり,その変動と産卵行動との関連を明らかにするために水中カメラによる継続撮影をスタートした.開始当初よりセンサの設置場所も拡大している[10].
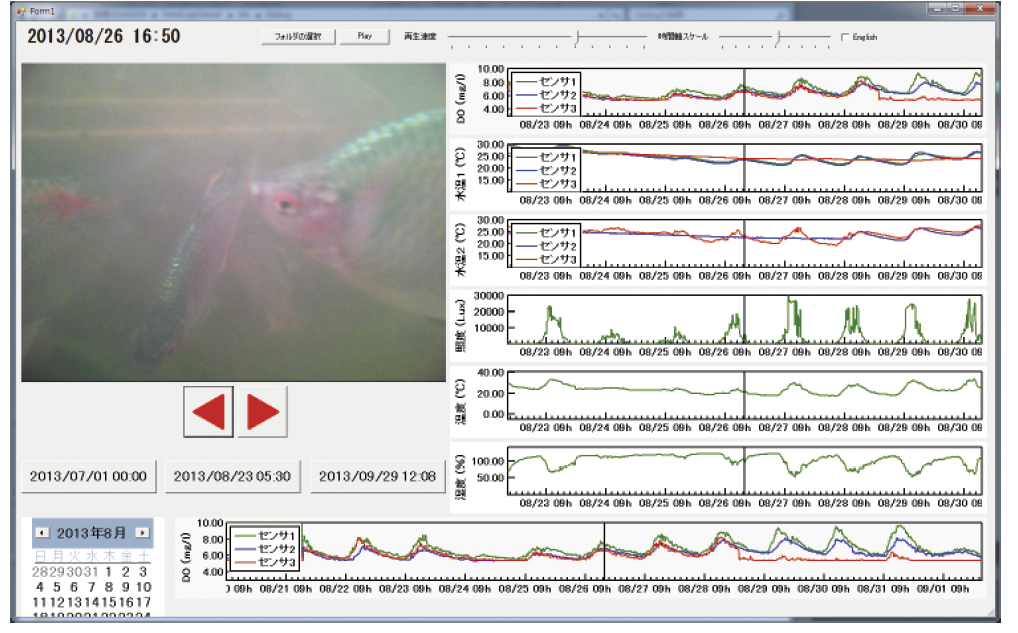
取得したセンサデータは,池内の場所とともにセンサデータを可視化するツール,およびセンサデータと水中映像を同時に可視化するツールを用いて確認できる.水中映像とセンサデータを同時に可視化するツール(ポンドログビューワ)のスクリーンショットを図4に示す.センサデータに同期して,左上に池内の水中映像が再生される.
3.3 ビニールハウス環境センシング
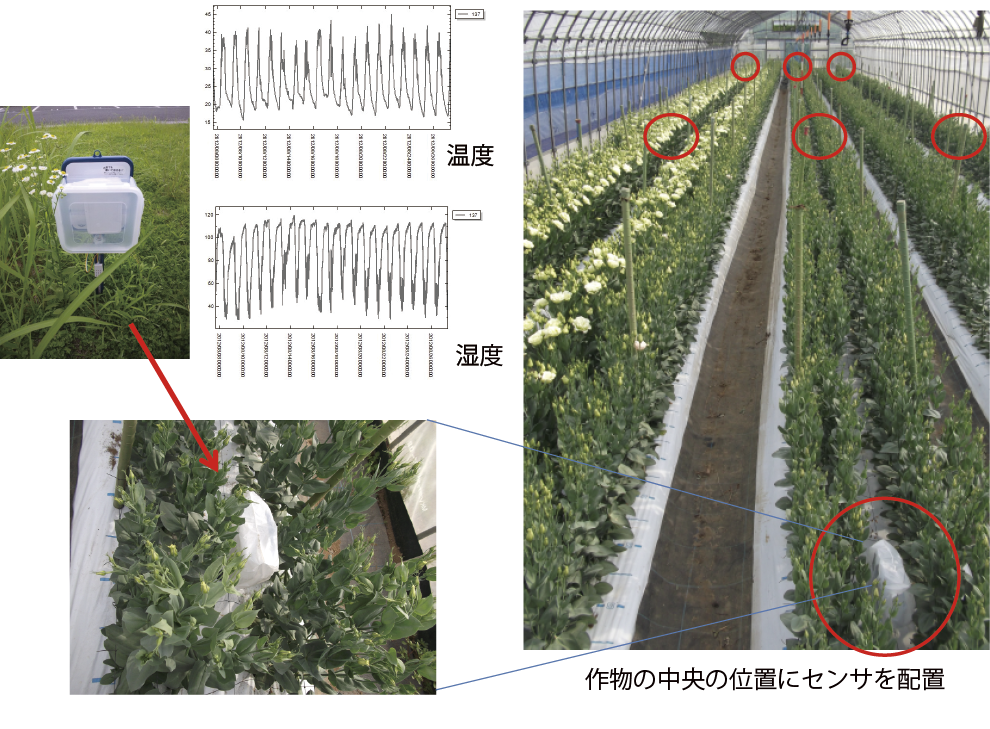
ビニールハウス環境センシングは,長野県佐久穂町において行った共同実験である[11].トルコギキョウおよびカーネーションを栽培する育苗施設に,温度,湿度センサを設置し,それらのセンサデータをスマートフォンを介してNTT研究所内のサーバに収集した.センサノードを設置したビニールハウスの様子を図5に示す.実験は2012年8月にスタートし,2013年10月まで計測が行われた.
本プロジェクトの目的は,どのような条件において品質の高いトルコギキョウが収穫できるかを明らかにすることである.当初温湿度に焦点を絞り実験を行った結果,ハウス内の温湿度の時間変化傾向が場所によって大きく差があり,トルコギキョウの品質と関連性があるという知見を得ることができた.そこで,さらに品質と環境指標との関連性を明らかにするべく,地温センサ,土壌水分センサの追加,測定地点の拡大,また,ハウス外へのセンサの設置などの変更を行った.
取得したデータは,スマートフォンで動作するモニタリングツールで確認できる(図6).ツール上で,センサ値とともに,センサの設置場所および写真を確認できる.
4.探索的環境センシングの枠組み
4.1 探索的環境センシングの概念モデル
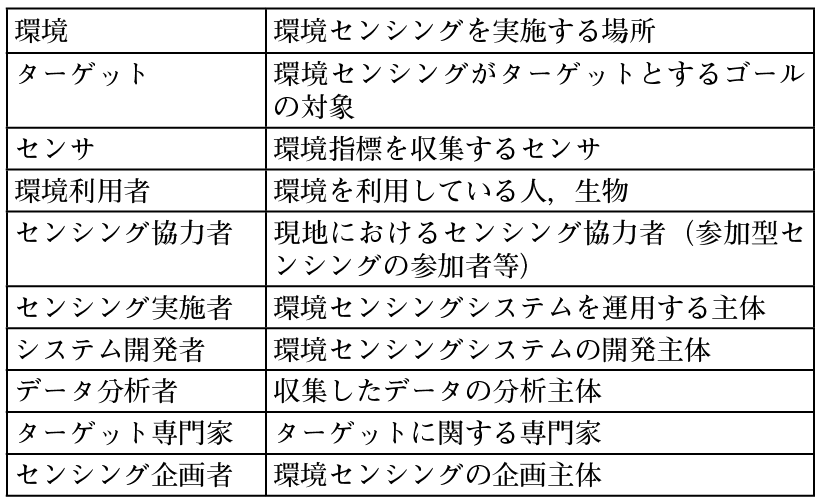
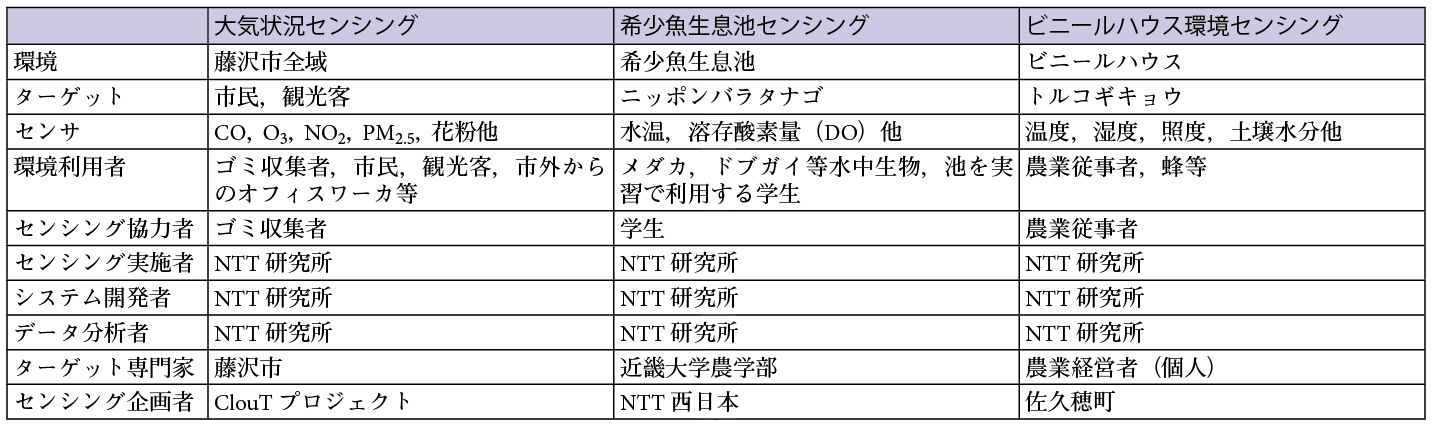
我々は,前章で紹介した事例を基に,ステークホルダの関係を一般化した(図7).本概念図は,環境内を構成するセンサ等のオブジェクト,および,センシングを推し進める主体(センシング主体)とからなる.センシング主体はセンシングを運用するセンシング実施者とそのステークホルダ(システム開発者,データ分析者,ターゲット専門家,センシング企画者)によって構成される.各構成要素の説明を表1に示す.また,前章で説明した事例の本概念モデルにおける解釈を表2に示す.
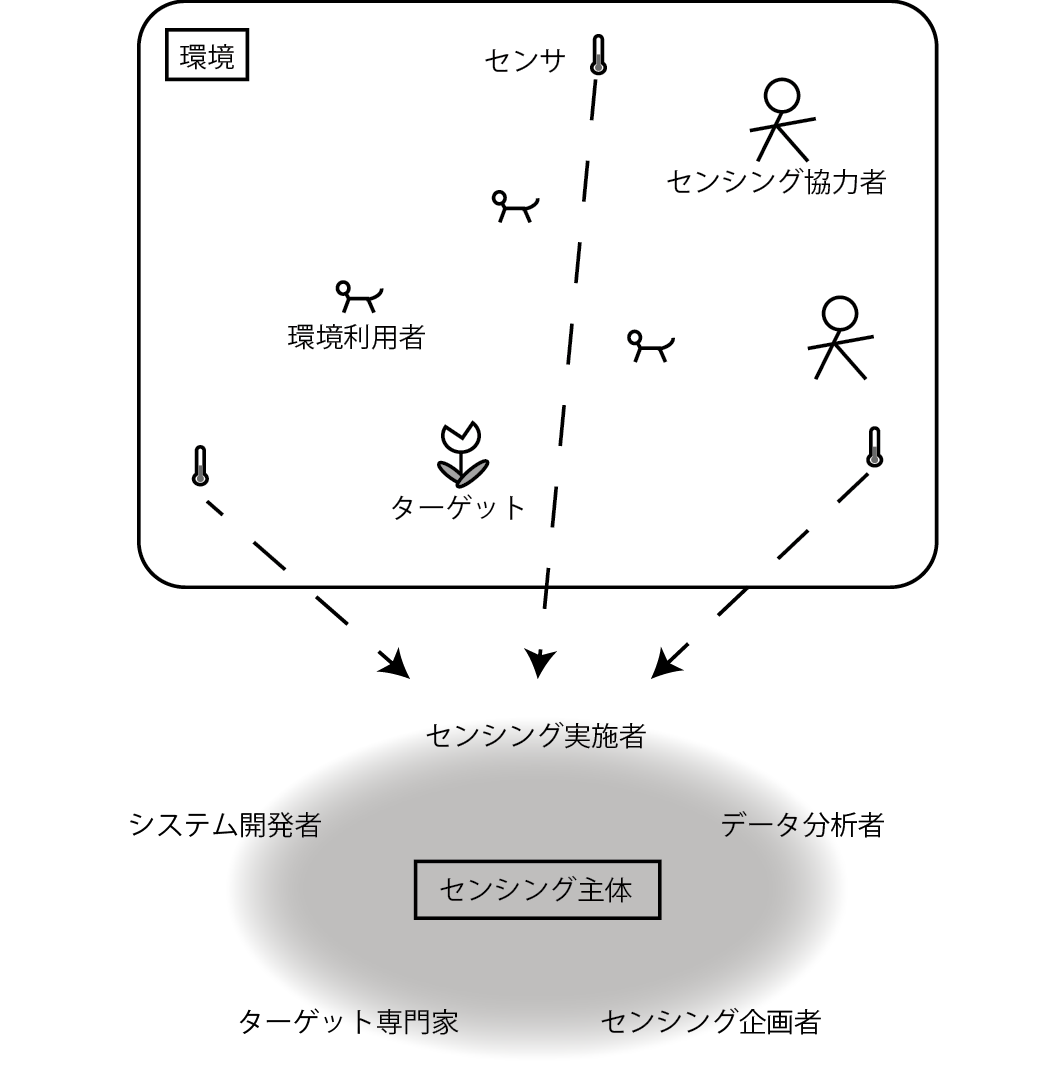
紹介した3つの事例においては,開発および運用を我々自身が行っているが,開発と運用を異なる主体が担当している場合も想定し,センシング実施者とシステム開発者も分割している.また,データ分析者もNTT研究所としているが,実際には弊社研究所の別グループが担当している.
探索的環境センシングを円滑に実施するには,センシング実施者は,ステークホルダと連携する必要がある.特に注意すべきは,ゴールに関連した適切な専門家やデータ分析者の存在である.環境センシング自体は,データ分析者やターゲット専門家がいなくても実施できてしまうが,適切な専門家やデータ分析者がいないと,収集したデータから知見を得ることができず,漠然としたゴールがいつまでも漠然としたまま明確化しないというケースが生じる.探索的環境センシングを実施する際には,データ分析者やターゲット専門家と密にインタラクションできる体制を実現することが非常に重要である.また,探索的環境センシングを円滑に実施するために,現地においても設置するセンサだけでなく,目指すべきゴールが対象とするターゲット,センシング協力者,さらには,ゴールの明確化に直接関係しないがセンシング環境を利用する者の存在も考慮する必要がある.
4.2 探索的環境センシングにおけるコスト
探索的環境センシングを円滑に進めるには,ステークホルダと連携しながらゴールに向かってセンシングと観察・分析のサイクルを素早く回すことが望ましい.このサイクルを回す過程で大別して以下の2つのコストがかかる☆4.
(1)環境センシングの試行錯誤にかかるコスト
(2)試行錯誤の結果発生するトラブル解消にかかるコスト
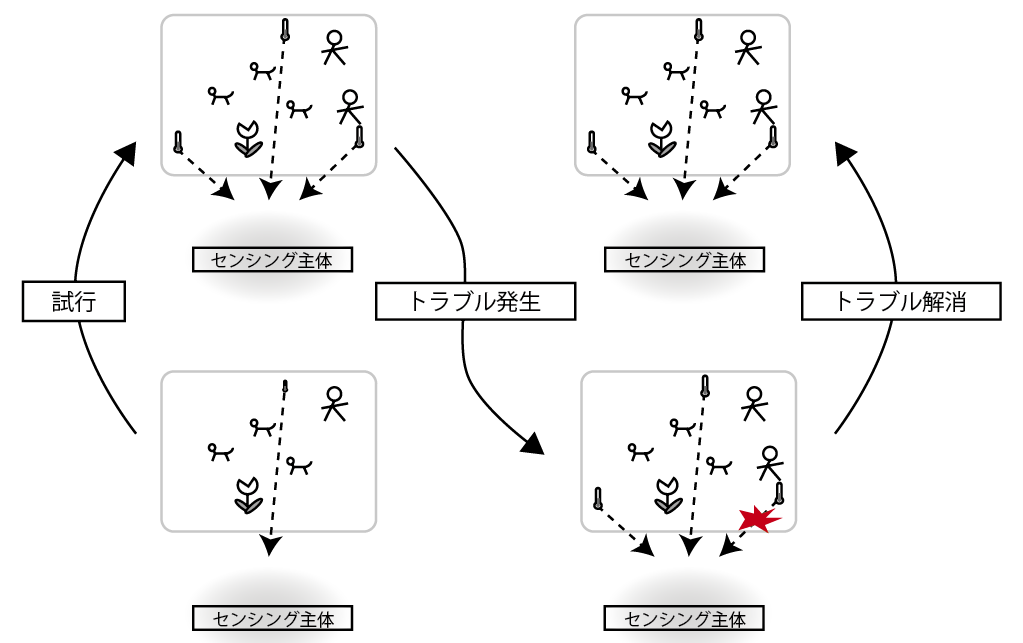
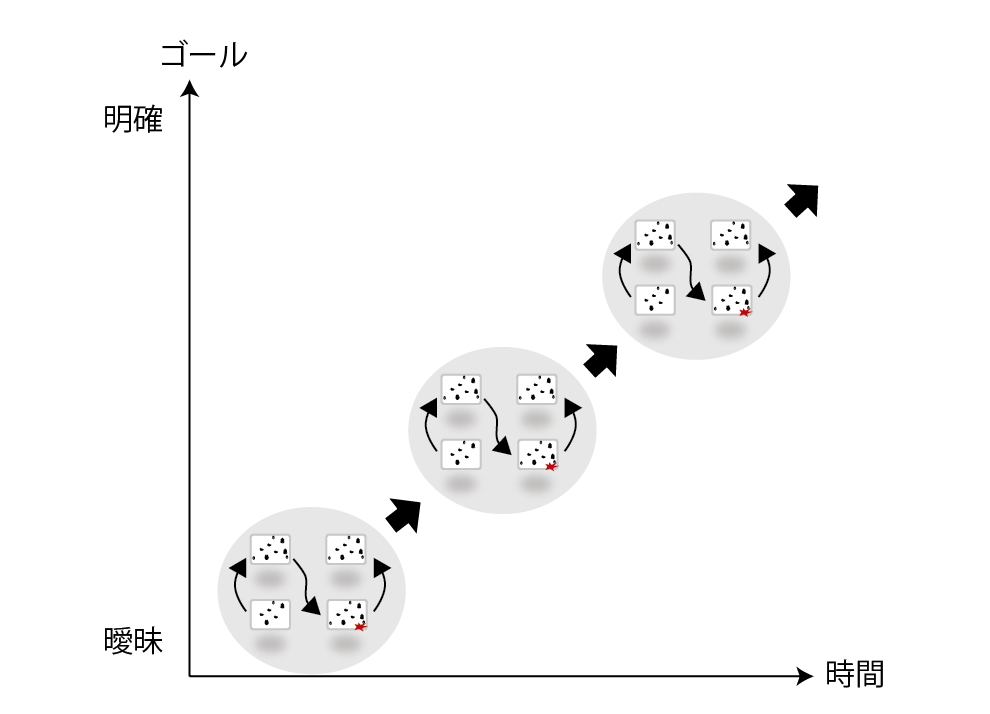
トラブル解消にも試行錯誤が必要となる場合もあるが,本稿においては,以下特に注記なく試行錯誤と記載した場合,環境センシングのゴール明確化に向けた試行錯誤に限定する.試行錯誤とトラブルの関係を図8に示す.試行錯誤によって環境センシングの場所や時間が変わると,それによって新たなトラブルが発生していく.探索的環境センシングでは試行錯誤と,発生したトラブルの解消を繰り返しながらゴールを明確化していく(図9).本節では,まず試行錯誤にかかるコストについて整理を行う.次に,試行錯誤の結果発生するトラブルに関して,事例を基に検討した対応指針について述べる.
4.2.1 環境センシングの試行錯誤にかかるコスト
探索的環境センシングでは,収集したデータの観察・分析に基づいて試行錯誤的にセンシングの変更を行っていく.この変更は以下の4種類に大別できる.
場所 センシングする地点の追加,変更,削除時間 センシングする期間や時間帯の変更
種別 センサの追加,変更,削除
設定 センシングパラメータの変更
これらの変更は,探索的環境センシングのゴールに向かう建設的な作業ではあるものの,内容によってはかなりのリソースを要求される場合が多い.本試行錯誤にかかる作業として,具体的には以下の項目が該当する.
準備 ハードウェア,ソフトウェアの開発,更新設置 現地における設置および初期調整
メンテナンス 設置後のパラメータ調整やバッテリ交換等維持管理
このうち,前述の3プロジェクトに共通してボトルネックとなったのが設置やメンテナンスにまつわる現地作業である.プロジェクトでは,センサノードソフトウェアのマイナーチェンジを頻繁に行っていたが,更新したソフトウェアのセンサノードへの適用は場合によっては作成から数カ月後になる場合もあった.これは,作業実施者のスケジュールや,センシング環境が遠隔地でできるだけ作業をまとめて行いたいなどの理由によるものだが,結果としてセンシングと観察・分析のサイクルを停滞させることになってしまった.探索的環境センシングを行う際には必要な現地作業の迅速対応と,現地作業を少なくする方法の検討が重要となる.
4.2.2 試行錯誤の結果発生するトラブル解消にかかるコスト
確認的環境センシングでは,センシング開始時にトラブルを解消すればその後は比較的安定してセンシングを続行できるが,探索的環境センシングではセンサやセンサの設置場所が中途で変更される.そのため,多種多様なトラブルに辛抱強く対応しながらプロジェクトを実施していく必要がある.
我々は,探索的環境センシングにおいて起こるトラブルへの対応指針を検討するため,2014年7月〜2016年5月にかけて,ゴミ収集車による大気状況センシングおよび希少魚生息池センシングにおいて発生した56件のトラブルに関しその要因と行った対応の分類を行った.結果を表3に示す.なお,以下図表中において,ハードウェアおよびソフトウェアはそれぞれHW,SWと記載する.発生要因については,以下の3種類に分類した.
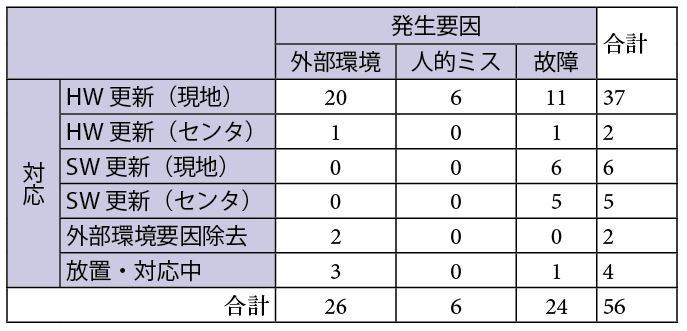
人的ミス 現地のセンシング協力者の運用によって発生したもの
故障 センシングシステムが意図しない動作を行ったもの
トラブルに対する対応は,表3に記載の6種類に分類した.なお,表中におけるセンタは,我々の研究所に設置されている,センサデータを受信し管理するためのサーバ設備群を指している.また,本表の件数は,センシングシステムを現地に設置後に発生したトラブルの数であり,設置前のシステム開発段階等で発生したトラブルは含まない.現地においてシステムに生じた不具合は,ソフトウェアのバグに起因したものも,人的ミスではなく故障という整理を行っている.
探索的環境センシングでは,試行錯誤の過程において設置場所の変更やシステム(センサ等)の変更を行うため,センシングを行う外部環境が変化し,これまで想定していなかったトラブルが発生する可能性が高まる.実際に全体の約46%(26/56)を占める多数の障害が外部環境を原因として発生していることが見てとれる.一方で,その外部環境要因を取り除くことは困難な場合が多く,外部環境要因を除去することで対応できたのは,約8%(2/26)であった.
次に,環境センシング一般で定期的に発生する故障を除いた32件の障害が,探索的環境センシングの概念モデルにおけるどの構成要素に関連して発生したかを表4に示す.
具体例を交え,探索的環境センシングの各構成要素とトラブルの関係を示す.

草の成長によるセンサケーブルの抜けや無線電波の遮蔽,センサの水没や低温によるバッテリの停止など17件のトラブルが環境の変化によるものであった.センシングの場所を変更することで,これまでの環境では起こり得なかったトラブルが発生する.また,同一の場所でも時間が経つにつれて,環境が変化し思わぬトラブルに結びつく.探索的環境センシングでは,場所の変更や時間の経過に伴う環境の変化によって一定のトラブルが発生することを織り込み,計画を立てるべきである.
場所の変更においては,それ以前にセンシングを行っていた場所との物理的な位置関係よりも質的な違いの大きさがトラブル発生に影響する.希少魚生息池センシングでは,開始当初からセンシングを実施していた池とは異なる池でのセンシングを開始したところ,同一池内でセンシング場所を変更していた際には発生していなかったトラブルが発生している(水草の急激な成長による水中カメラ撮影の阻害など).公共車両による大気状況センシングにおいても,センシング機器の設置対象を異なる車種の車両に拡大したところ,電磁ノイズがほかの車載機器に影響を及ぼすというトラブルが発生した.時間に関しては,時間が経つと設置環境の温湿度といったパラメータだけでなく,植生等も変化していく.たとえば,希少魚生息池では,年度によって藻の発生量が異なり,水中カメラ撮影に影響を及ぼした.また,時間が経過することで,環境利用者の構成や環境の利用のされ方も変化することにも留意する必要がある.
設置場所が以前と質的に大きく変わる場合には,設置後の現地における動作確認を念入りに行う,設置期間が長期に渡る場合には,センシングの状況はもとより周囲の環境の変化についても現地で定期的に確認する,現地のセンシング協力者からヒアリングを行う,といった対策をすべきである.
ターゲット希少魚生息池センシングでは,池内に沈めたUSBケーブルにニッポンバラタナゴが興味を示し,頻繁に噛みつくという行為が見られた.これは,センシング自体がターゲットの行動に影響を与えてしまったトラブルである.実証実験では,現在までにこの1件以外ターゲットに影響を及ぼした事例は確認していないが,環境センシングを行う際には,ターゲットに対する影響を排除し,ターゲットの行動に変化が起きないよう細心の注意を払う必要がある.
環境利用者イノシシによる給電用埋設ケーブルの掘り起しや,センサボックス内への大量のアリの侵入,草刈りにおけるケーブルの切断,遮蔽物の移動による電波状況の不安定化など計8件のトラブルが環境利用者に関係するものと判断できた.環境利用者は時として,環境センシングの運用を阻害する.データ収集に直接的に影響するような事例以外にも,水中カメラに付けた庇によってできた日陰をフナが棲家としてしまい,撮影対象のニッポンバラタナゴがカメラの前に寄り付かなくなってしまったということが起きた.環境センシングがフナという環境利用者の行動に影響を与え,結果として期待したデータを収集できなくなってしまったという事例である.環境センシングを行う際には,ターゲットだけでなく環境利用者の行動変容にも注意を向ける必要がある.
センシング協力者センシングシステムのバッテリ交換忘れなど,計6件の人的ミスが,センシング協力者に関連するものとして判断できた.このようなトラブルを減らすためには,センシング協力者の負担を軽減する対策を講じるべきである.大気状況センシングでは,ゴミ清掃車のドライバに,大気状況センシングを開始するための操作(タブレットの電源ON)を依頼していたが,ドライバの主業務はゴミ収集であって環境センシングではないため,操作を忘れられてしまうことが散見された.このトラブルに関しては,ゴミ清掃車のエンジンONに連動してセンシングシステムを起動する仕組みをセンシングシステムに導入することで,センシング協力者のシステム開始操作をなくし解消した.また,バッテリ交換忘れについても,センサノードへスリープ機能を導入することによるバッテリの長寿命化,バッテリー残量に応じたアラートの提示などの負担軽減対策を行っている.
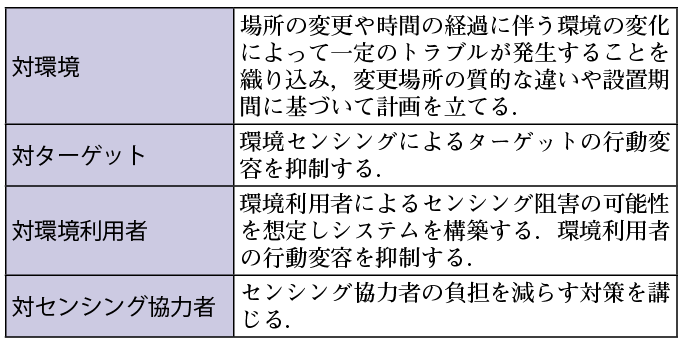
現場におけるトラブルを未然に防ぎ,また素早く対応するための指針を表5にまとめる.すべてのトラブルを事前に予測することは難しいが,表5に示した各構成要素を具体的に想定し,指針に従ってシステムを設計することである程度のトラブルを未然に防ぐことは可能である.たとえば,希少魚生息池センシングでは,ニッポンバラタナゴを含めた池内の生物の行動が変容する可能性をターゲット専門家らと議論し,アクティブなセンサ(測定に際して,光や超音波などをセンサ側から出力するセンサ)は利用していない.また,ニッポンバラタナゴが婚姻色と同色の色に反応して行動してしまう可能性を考慮し,センシング機器から婚姻色を排除している☆5.
環境センシングを行う環境内の構成要素,ターゲット,環境利用者,センシング協力者を具体的に想定することは,大まかにコストを見積もる上でも有用である.構成要素を具体的に想定することで,不測のトラブルが発生する可能性の多寡を推定できるためである.探索的環境センシングにおいて発生するトラブルの内容は多岐にわたり,個別のトラブル解消にかかるコストも一様ではない.表3に示したトラブルに関しても,センサデータの不達などセンシングに障害が起きているトラブルもあれば,センサボックスへのアリの侵入など,すぐにセンシングに影響はないが今後の影響を考え対応が求められるトラブルもある.また,すぐに解消できたトラブルもあれば,対応までに数カ月を要したトラブルもある.そのため,予測不能なトラブルも含め事前にトラブル対策のコストを正確に見積もるのは困難であるといわざるを得ない.しかし,我々の経験上,トラブル数とコストは発生するトラブルが増えればそれだけトラブル解消にかかるコストが嵩んでいくという依存関係にあるため,トラブル可能性の多寡を推定することにより,トラブル解消用にどの程度資金を確保するかといった大まかな検討は可能である.
トラブル可能性の多寡は構成要素の複雑さと制御可能性の観点から推定する.構成要素が複雑で制御が難しい環境ほど,想定外のトラブルが起こりやすい.我々のプロジェクトで最も多様なトラブルが発生しているのは希少魚生息池センシングであるが,希少魚生息池は完全な野外環境であり,人だけでなく多様な生物がその環境を利用していることの要因が大きい.表3に示した56件のトラブルのうち,実に42件ものトラブルが希少魚生息池センシングに関するものであった.一方,ビニールハウス内は,侵入できる生物も限られており,環境内の温度湿度などもある程度の範囲で制御可能である.大気状況センシングでは,藤沢市全域を対象としておりさまざまな環境利用者が存在するが,センシングシステムを人の手の届かない清掃車の屋根の上におくことで,センシングへの影響をある程度制御できている.
指針に基づいてトラブル対応に必要なコストを削減するとともに,表5に示した各構成要素を具体的に想定し,その複雑さと制御可能性の観点からトラブルが発生する可能性の多寡を推定することで,探索的環境センシングにおけるコスト見積もりの難しさを低減できると考える.
5.探索的環境センシングのアジャイル化
前章では探索的環境センシングにおいてかかるコスト,およびコストを事前に低減するためのトラブル対応指針について述べた.ここで,トラブルの発生を恐れるあまり設置前に時間をかけて念入りにトラブルの可能性を吟味し完成度の高いセンシングシステムの導入を試みるのは,探索的環境センシングにおいては,必ずしも良策とは言えないことを注記しておきたい.環境センシング自体を中止せざるを得ないようなトラブルの可能性は事前に摘んでおく必要があるが,それ以外のトラブルについてはむしろシステムの導入によって洗い出すぐらいの心構えで,まずは早くセンシングを開始すべきである.これは,実環境において長期に渡りセンシングをする際には,事前にトラブルの可能性のすべてを予想するのが困難という我々の経験にも根ざしているが,探索的環境センシングでは,不完全であってもデータを収集することにより,そのデータを基に,段階的にゴールに対する理解が深まるというのが大きな理由だ.データ分析者やターゲット専門家はデータが不完全であるという事実も踏まえた上で,時にそこから有意義な知見を見出す.センシング実施者は,トラブルを恐れてシステムの完成度を高めるよりも,むしろ積極的にセンシングを開始し,センシングをしながら並行して発生したトラブルを解消していくことが肝要である.
5.1 アジャイル環境センシング
我々は,このような考えのもとに,アジャイル環境センシングという環境センシングの実施スタイルを提案・実践している.従来型の環境センシングでは,アーキテクチャデザイン,ハードウェア/ソフトウェア開発を経て十分に設置できるだけの品質が確保できたと判断された後に,ようやくセンシングシステムをフィールドに設置しセンシングがスタートする(図10(a)).そして,設置後期待したデータが収集できなかったり,トラブルが発生したりした際には,いったんセンシングシステムを撤去し,システムの再設計,開発を行った上で,再度設置を行う.一方,アジャイル環境センシングでは,まずは急造のセンシングシステムをできるだけ早く設置してしまう.そして,設置した結果得られたデータや知見を基に,アジャイルソフトウェア開発のように,センシングシステムのデザイン,ハードウェア開発,ソフトウェア開発,設置・センシングを短いスパンで実施し,センシングシステムの完成度を高めていく.(図10(b)).この際,データが不十分等のトラブルが発生した際も,可能な限り,データの収集は継続する.
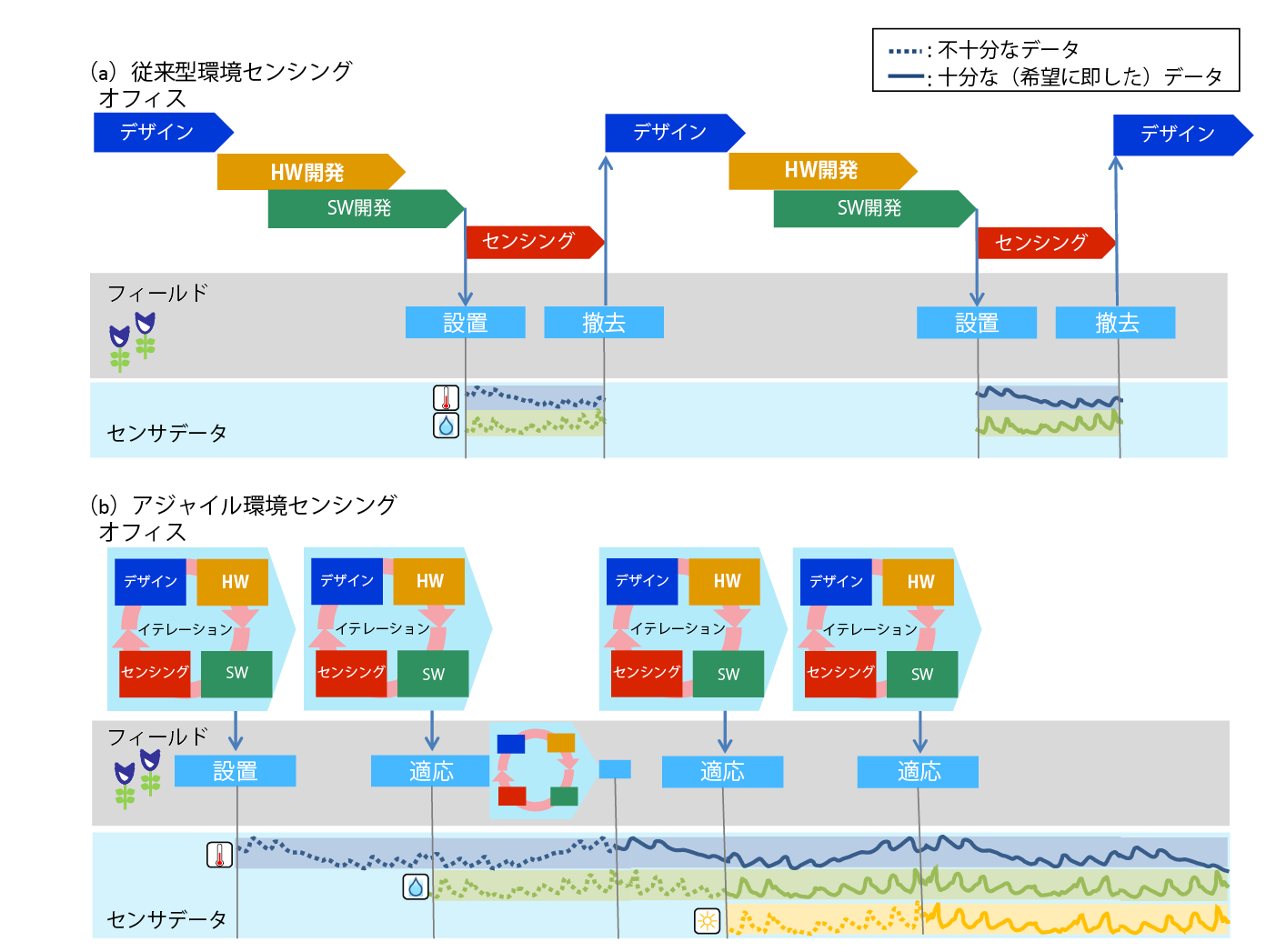
アジャイル環境センシングの利点を以下に示す.
迅速な現地適応 アジャイル環境センシングでは初期導入を早く行うことで,センシングをしなければ検討が難しいセンシング設定のチューニングや,トラブルの発見を迅速に進められる.環境に適したセンシング設定(たとえばセンサの感度や適切なセンシングインターバル)は,往々にして収集したデータを確認しないと分からない.また,トラブルも迅速な初期導入によって早めに洗い出すことで,結果的にシステムの安定化までの期間を短縮できる.また,環境の状態は時間とともに変化していくが,その際にもデータの収集を継続していることで,変化に応じたセンシング設定の調整やトラブルへの迅速な対応が可能となる. 試行錯誤サイクルの加速 本章の冒頭で述べたように,データ分析者やターゲット専門家はデータが不完全であっても,そこからしばしば有益な知見を見出す.データの収集を素早く開始し,ステークホルダに共有することで,ゴールの明確化が進み,試行錯誤のサイクルを加速することが期待できる. 柔軟なコスト管理 上記2点の利点によりアジャイル環境センシングはゴールへの到達を短縮できる.これは,全体的なコスト削減に寄与すると考えられる.さらに,アジャイル環境センシングはコストを考慮した柔軟な運用にも優れていると考える.デザインから設置/適応までの各スパンにおいて,新たなデータに基づく知見が得られるため,その結果に基づいて次の試行錯誤サイクルの実施判断をコストの側面からも都度行えるためである.すなわち,得られた知見と利用可能なコストを踏まえて,次の試行錯誤の内容を決定し,場合によっては,環境センシングの大幅な変更,終了といった判断をコストも考慮して行える.短期間で多くの設置/適応を繰り返すということは,その判断個所を増やすということであり,コスト管理の柔軟性が従来型の環境センシングと比べ高まると考える.5.2 アジャイル環境センシングを実現するコンポーネント
アジャイル環境センシングの実施スタイルに基づき迅速にセンシング内容を変更するためには,ハードウェア/ソフトウェアの両面で効率的開発を支援する必要がある.我々は,アジャイル環境センシングの考えを実践するための必須コンポーネントとして,それぞれ以下を抽出し,実証を進めている.
- さまざまな環境におけるセンシングに対応できる汎用的なセンシング機器
- センシングプログラムの効率的開発を支援するセンサノード用仮想マシン
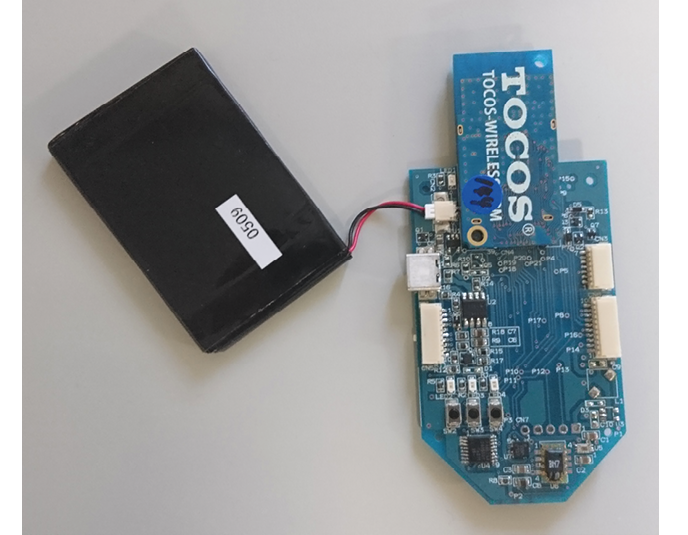
まず,ハードウェア開発を迅速に行うため,さまざまな環境におけるセンシングに対応可能なセンサノードを実装した.作成したセンサノードは,さまざまな実環境センシングにおいて基礎データとなる,温度,湿度,照度センサを内蔵し,またさまざまなセンサの接続を可能とするために,デジタルI/O,ADC,I2C,SPI,UARTの各ポートを備える(図11).また,充電可能なLi-Po電池,乾電池,USBによる各給電に対応し,2.4GHz帯の無線(IEEE802.15.4)によりデータを収集送信できる.これにより,目的に応じたセンサを接続したセンシングシステムを素早く実現することができる.
次に,迅速なセンサノード用ソフトウェアの開発を支援するために,センサノード用VM(仮想マシン)CILIXを構築した[12].CILIXは,さまざまなIoT機器にインストール可能なCIL(Common IntermediateLanguage)仮想マシンである.ArduinoのArduino IDEのように,センサノードとして利用可能なIoT機器は専用の開発環境を要求する場合が多く,センサノードプログラム開発の敷居を高めている.一方CILIXを搭載したセンサノードはVisual StudioやMonoなどの汎用的な開発環境を用い,C#などのCIL対応の複数の高級言語を使ってセンシングプログラムの開発ができる.そのため,多くのプログラマがセンシングプログラムを簡単に開発可能である.
また,CILIXは,迅速にセンシングシステムを現地に適応させていくための機能として,遠隔からのプログラム書き換え機能を実現している.CILIXを搭載したセンサノード上のプログラムは遠隔から無線によって書き換えできるため,トラブルが起きた際などにも素早く修正プログラムの導入を行える.これは,探索的環境センシングのアジャイル化だけでなく,4.2.1節で述べたメンテナンスコストの削減にも寄与する.
5.3 課題
アジャイル環境センシングは,ゴールが不明確であり試行錯誤的に環境センシングを行う探索的環境センシングに適したセンシングスタイルである.ゴールが明確な確認的環境センシングでは,従来型の環境センシングスタイルに基づいて安定性の高いシステムを最初から構築してもよい.探索的環境センシング実践の結果,ゴールが明確化した場合も同様である.
アジャイル環境センシングの課題として,以下を挙げる.
パフォーマンス 我々はアジャイル環境センシングのキーコンポーネントとしてセンサノード用仮想マシンCILIXを構築しているが,このようなミドルウェアを介することにより処理速度等のオーバヘッドが発生する.我々が実証実験でターゲットとしている環境データに関しては問題がないが,高ビットレートでデータを収集して処理するようなタスクをセンサノードで実施する際には注意が必要である.たとえば,CILIXを搭載した図11のセンサノードを用いた場合,大気状況センシングで実現しているように,10数種類のセンサデータを数秒ごとに収集し無線でリアルタイムに送信するような機能は実現可能であるが,加速度センサのデータを100Hzで収集し無線でリアルタイムに送信するような機能の実現は難しい. バージョン管理 我々は,センサノード用プログラムを短いスパンで更新するにあたり,現地においてもプログラムの簡易な修正等を実施することがある.また,個別のセンサノードごとに,それぞれの設置場所に応じたチューニングを施したプログラムを導入することも行っている.そのため,派生するプログラムのバージョンが多岐に細分化し,ソフトウェアの品質劣化の温床となり得る.アジャイル環境センシングに適したバージョン管理方法を検討する必要があると考えている. スケーラビリティ 現状では大規模な環境センシングにおいてアジャイル環境センシングが有効に機能するかの検証は行っていない.プログラムの効率的な開発と迅速な更新は,大規模な環境センシングにおいては,より繊細なバージョン管理や,システムオーケストレーションをシミュレートすることによる事前検証などの機構を検討する必要がある.6.議論
6.1 探索的環境センシングにおけるコストの見積もり
確認的環境センシングに対して探索的環境センシングはコストの見積もりが難しい.この課題に対して,本稿では,まず,探索的環境センシングを一般化したモデルを構築することで,試行錯誤過程においてコストがかかるポイントやトラブルが起きるポイントを明らかにした.これにより,それぞれの環境センシングに置いて,ポイント別に必要なコストを検討できるようにした.また,トラブル対応のための指針,および,アジャイル化により,試行錯誤過程におけるコストの増大を防ぐ方策を示した.試行錯誤のサイクルを高速化することは,探索的環境センシングのゴール修正や終了判断の機会を相対的に増やすことにも繋がるため,プロジェクトで利用可能なリソースを考慮しながら,ゴールの変更や終了判断ができると考えている.
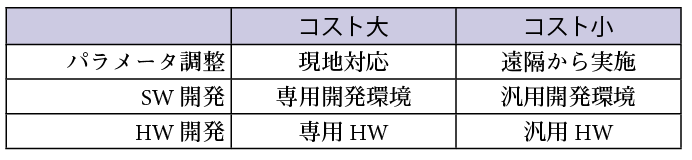
各サイクルにおける試行錯誤的なセンシングの変更は,大まかに以下の順にコストが増大すると考える.
Level 1 パラメータ調整Level 2 ソフトウェア開発を伴う変更
Level 3 ハードウェア開発を伴う変更
ハードウェアの開発を伴うセンシングの変更は,通常ソフトウェアの開発も伴うため,必然的にコストが増大する.一方,ハードウェア開発を伴わずソフトウェア開発のみで実施する場合や,ソフトウェア開発も伴わないパラメータ調整は,それほどコストがかからない.
5.2 項で述べたアジャイル環境センシングを実現するコンポーネントは,上記3レベルにおいてそれぞれコストを低減する(表6).遠隔からのプログラム書き換え機能は,迅速なパラメータ調整を実現するだけでなく,現地への移動費の削減につながる.CILIXのCILインタプリタ機能は汎用的な開発環境を利用した迅速な開発を実現し,コストの低減に寄与する.また,我々が実装した汎用無線センサノードは,さまざまなポートを備えており,センサの変更などにも大規模な改修を必要としない.
一方,ゴールが明確化していく過程で,現地における微細なパラメータ調整が必要なケース,CILIX等の仮想マシンを利用せずにハードウェアの性能を最大限に利用したいケース,特定の環境や環境指標に最適化したハードウェアを利用したいケースなどもあると思われる.試行錯誤におけるセンシング変更のレベル感や,より環境に特化した開発や調整を必要とする可能性があるか,という点もコストを見積もる上で有用な視点であると考える.
本稿のモデルを利用した環境センシングを実施し,より詳細なコスト見積り方法を検討していきたい.
6.2 探索的環境センシングとプロジェクトの裁量性
探索的環境センシングの実践においてコストの観点で重要なのは,センシング主体が潤沢な資金を有するかどうかではなく,センシング主体が資金に対して十分な裁量権を有するかであると考える.
探索的環境センシングでは,試行錯誤の過程においてさまざまな知見が得られるため,限られた資金であっても裁量があれば,試行錯誤ごとに実施判断(資金支出判断)をしながら有益な成果を得ていくことができる.反対に,センシング主体が資金の支出に十分な裁量権を持っていない,たとえば,試行錯誤ごとの細かな資金支出判断がすぐにはできない場合,試行錯誤をアジャイルに行うことができなくなる.その結果として,ゴール明確化に余計な時間がかかり,センシングのコストが増大する.ただし,このようなプロジェクトにおいても,類似の環境センシング事例の知見を活用し試行錯誤できる個所を限定すれば,あらかじめ資金の上下限の見積もりが可能になると考えている.探索的環境センシングにおいて,追加で支出する資金を最小化する運用ストラテジについても今後検討していきたい.
7.おわりに
本稿では,我々が実施している3つの環境センシングプロジェクトを紹介し,得られた知見を基に探索的環境センシングの概念のモデル化とトラブル対応指針の作成を試みた.また,探索的環境センシングを効率的に行うために,アジャイル環境センシング手法の紹介を行った.
試行錯誤過程においてコストがかかるポイントやトラブルが起きるポイントを示した探索的環境センシングモデルは,環境センシングにおいて必要なコストを検討する際に利用できると考えている.また,トラブル対応のための指針,および,アジャイル化手法は,試行錯誤過程におけるコストの低減に寄与する.アジャイル化手法によって試行錯誤のサイクルを高速化することは,探索的環境センシングのゴール修正や終了判断の機会を相対的に増やすことにも繋がるため,プロジェクトで利用可能なリソースを考慮しながら,ゴールの変更や終了判断を柔軟に実施できると考えている.
アジャイル環境センシングは,探索的環境センシングを各所で進めていく上で効率化を図る過程で生まれた概念である.今後,アジャイル環境センシングの有用性についても検証していきたいと考えている.
謝辞 本研究成果の一部は,国立研究開発法人情報通信研究機構(NICT)の委託研究「ソーシャル・ビッグデータ利活用・基盤技術の研究開発」により得られたものです.
各実証実験にご協力いただいた,藤沢市環境事業センター,近畿大学農学部保全生態学研究室,長野県佐久穂町の関係各位に感謝いたします.
参考文献
- 1) Lanza, J., Sánchez, L., Muñoz, L., Galache, J. A., Sotres, P., Santana, J. R. and Gutiérrez, V. : Large-Scale Mobile Sensing Enabled Internet-of-things Testbed for Smart City Services, International Journal of Distributed Sen-sor Networks, Vol.11, No.8 (2015).
- 2) Aoki, P. M., Honicky, R. J., Mainwaring, A., Myers, C., Paulos, E., Subramanian, S. and Woodruff, A. : A Vehicle for Research : Using Street Sweepers to Explore the Landscape of Environmental Community Action, Proc. SIGCHI Conference on Human Factors in Computing Systems, CHI '09, pp.375-384 (2009).
- 3) 中小路久美代,山本恭裕:創造的情報創出のためのナレッジインタラクションデザイン,人工知能学会論文誌,Vol.19, pp.154-165 (2004).
- 4) Schön, D. A. : The Reflective Practitioner : How Professionals Think in Action, Vol.5126, Basic books (1983).
- 5) Suwa, M. and Tversky, B. : Constructive perception : A Metacognitive Skill for Coordinating Perception and Conception, Proceedings of the Annual Conference of the Cognitive Science Society (2003).
- 6) 岸野泰恵,須山敬之,納谷 太,米澤拓郎,中澤 仁,徳田英幸:スマートシティ実現に向けた車載型大気情報センシングシステム,マルチメディア,分散協調とモバイルシンポジウム2014論文集,Vol.2014, pp.952-958 (2014).
- 7) 白井良成,岸野泰恵,納谷 太,柳沢 豊,米澤拓郎,中澤 仁,徳田英幸:公共車両を利用した大気状況センシングの試み,電子情報通信学会技術研究報告,Vol.115, No.393, pp.1-5 (2016).
- 8) 岸野泰恵,柳沢 豊,松永賢一,須山敬之,納谷 太,坂田伊織,北川忠生:センサネットワークを用いた希少魚生息環境モニタリング,研究報告ユビキタスコンピューティングシステム(UBI),Vol.2014, No.11, pp.1-7 (2014).
- 9) Kishino, Y., Yanagisawa, Y., Shirai, Y., Mizutani, S., Naya, F. and Kitagawa, T. : A Habitat-monitoring System for an Endangered Fish Using a Sensor Network, Proc. the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing (Ubicomp 2015), pp.133-136 (2015).
- 10) 水谷 伸,白井良成,岸野泰恵,柳沢 豊,大津賀真之,北川忠生,納谷 太:絶滅危惧の魚の繁殖生態解明に向けたオンライン画像行動解析の予備的検討,マルチメディア,分散協調とモバイルシンポジウム2016論文集,Vol.2016, pp.572-576 (2016).
- 11) 須山敬之,納谷 太,柳沢 豊:センサネットワークによるビニールハウス環境センシング,マルチメディア、分散協調とモバイルシンポジウム2013論文集,Vol.2013, pp.938-944 (2013).
- 12) Yanagisawa, Y., Kishino, Y., Suyama, T., Terada, T., Tsukamoto, M. and Naya, F. : A CIL Virtual Machine for Wireless Sensor Network Applications, Proc. The 2014 International Conference on Parallel and Distributed Processing Techniques and Applications (PDPTA'14) (2014).
脚注
- ☆1 環境省大気汚染物質広域監視システム(そらまめ君),http://soramame.taiki.go.jp/
- ☆2 ClouT Project, http://clout-project.eu/
- ☆3 コントロールセンタにおける地図表示は,国土地理院(http://www.gsi.go.jp/) の地理院タイルにゴミ収集車の移動経路等を合成したものである.
- ☆4 これ以外に,センシング主体内の各種調整や,センシングの効率化,安定化を図るためのソフトウェア,ハードウェア更新等のコストがかかるが本稿では割愛する.
- ☆5 ニッポンバラタナゴのオスは繁殖期になると体色がバラ色に変化する.
1998年慶應義塾大学環境情報学部卒業.2000年同大学院政策・メディア研究科修士課程修了.同年日本電信電話(株)入社.博士(工学).HCI,センサネットワークの研究に従事.ヒューマンインタフェース学会,日本バーチャルリアリティ学会各会員.
岸野 泰恵(正会員)kishino.yasue@lab.ntt.co.jp2002年大阪大学工学部卒業.2004年同大学院情報科学研究科博士前期課程修了.2007年同研究科博士後期課程修了,日本電信電話(株)入社.博士(情報科学).ユビキタスコンピューティング,センサネットワークに関する研究に従事.
水谷 伸(非会員)mizutani.shin@lab.ntt.co.jp1991年大阪大学大学院基礎工学研究科生物工学専攻修士課程修了.同年日本電信電話(株)ヒューマンインタフェース研究所入所.1998年コミュニケーション科学研究所.現在,コミュニケーション科学基礎研究所.博士(理学).ニューラルネットワーク,非線形系,センサの研究開発に従事.
納谷 太(非会員)naya.futoshi@lab.ntt.co.jp1994年慶應義塾大学大学院理工学研究科計算機科学専攻修士課程修了.同年日本電信電話(株)コミュニケーション科学研究所入所.2003年より2009年まで(株)国際電気通信基礎技術研究所出向.現在,日本電信電話(株)コミュニケーション科学基礎研究所主幹研究員・グループリーダ.博士(工学).2014年より北海道大学大学院情報科学研究科連携分野客員教授.ヒューマン・ロボットインタラクション,センサネットワークによる行動・状況・環境理解,スマートシティにおける都市状況把握・集団最適誘導等の研究開発に従事.
柳沢 豊(正会員)kani@ieee.orgNTTコミュニケーション科学基礎研究所,客員研究員.博士(工学).1998年大阪大学大学院工学研究科,博士後期課程修了.同年,日本電信電話(株)に入社,基礎研究所に所属.以後,西日本電信電話(株)勤務を経て,2013年9月より現職.神戸大学大学院工学研究科,学術研究員,およびm plus plus(株),CTOを兼務.センサーネットワーク,ウェアラブルコンピューティング,プログラミング言語の研究に従事.IEEE会員.
採録決定:2017年4月10日
編集担当:戸辺義人(青山学院大学